时变故障下四旋翼无人机的自适应容错控制
2021-06-10郑俊哲,宋占魁
郑 俊 哲,宋 占 魁
(大连工业大学 信息科学与工程学院,辽宁 大连 116034)
0 引 言
随着科学的进步、自动化技术的发展,四旋翼无人机逐步变得智能化、便利化。它可以用于输电线路巡检、运送快递,还可以代替人力在危险系数较高的环境下进行远程任务[1]。在无人机控制系统中,姿态控制是实现无人机自主飞行的基础。比如,当无人机在树林或者丛林等环境下作业,需要靠自身变换姿态来避免与枝条发生碰撞,保证无人机安全作业。当无人机需要在狭窄的环境勘察时,同样也需要进行姿态控制来规避障碍[2]。其中,姿态控制就是控制四旋翼无人机的3个姿态角(俯仰角、滚转角、偏航角)稳定的跟踪期望信号,并保证闭环系统的渐进稳定[3]。由于无人机强耦合的特性,只有保证姿态系统稳定控制,才能使其按照期望轨迹自主飞行。然而,四旋翼无人机在实际的飞行中,姿态会受到外界干扰或者微小故障的影响,会导致无人机飞行偏离期望轨道[4]。所以,需要设计控制器或者观测器来对系统受到的总的不确定性因素进行估计和补偿,从而保证无人机在有外界干扰或者出现故障的情况下对姿态可以有效地控制跟踪。
四旋翼无人机常见故障包括执行器故障和传感器故障[5]。其中,执行器故障对无人机的自主飞行有着较大的影响,更难以解决[7-8]。
针对执行器故障下姿态跟踪控制的研究方法颇多。Sadeghzadeh等[9]采用线性二次调节器,分别加入自适应算法和变增益PID算法。经试验,加入自适应因子的控制器方便实现,后者变增益算法的抗干扰性较好,具有更好的鲁棒性。但是线性控制器受到外界扰动的影响较大,系统难以在一定时间内恢复稳定。李炜等[10]将系统执行器故障程度分段,分别设计不同的补偿控制律。对无人机进行实时故障检测,并判断其故障程度类型,从而调用对应的控制律进行补偿故障损耗。调用控制律会增加控制器对突发状况的响应速度,导致跟踪效果变慢。Chen等[11]提出了一种可重构型飞行控制的理论框架,在控制系统中选择合适的信号对故障进行补偿。其算法较为复杂,实现起来困难。刘凯悦等[12]基于滑模控制算法,设计了主动容错控制器和被动容错控制器,二者均有很好的容错控制。但是对于外界扰动,主动容错控制器的效果更好,被动容错控制器受外部的环境影响,控制效果变差,而主动容错控制需要实时的进行故障检测,较为复杂。孟庆霄等[13]利用扩张观测器(ESO)设计一种自抗扰控制算法。将无人机的不确定因素扩张为系统状态,利用有限的模型参数估计“集中扰动”,从而将无人机非线性系统近似化为线性系统进行跟踪控制。但是,扩张观测器为了实现高精度观测,需要较小的采样时间。窦景欣等[14]在经典控制自抗扰控制算法中,加入模糊误差反馈控制器,使系统误差超调量平均减少75%。Shi等[15]利用神经网络(RBF)逼近外界扰动上界值,自适应滑模策略实现了无人机在线估计并补偿执行器故障。其收敛速度快,跟踪精度高。但是应对突发严重失效的情况下,跟踪误差会有较大超调量。
现有对故障无人机飞行控制的研究多数都是针对定值故障和扰动进行研究控制,当执行器出现故障时,系统为了维持正常飞行会增加故障执行器的控制力矩,从而更容易导致已经故障的执行器发生更严重的失效损耗。
本研究从控制算法的角度,针对时变故障和外界扰动问题,设计一种自适应滑模容错控制器。针对姿态模型中的不确定项,引入Nussbaum增益函数;针对外界扰动,设计自适应因子对其进行补偿;针对输出受限问题,利用障碍李雅普诺夫函数进行严格数学证明,保证姿态角满足约束条件。通过与不同方法进行仿真实验对比,验证所设计控制器的优越性和鲁棒性。
1 建模与设计方案
描述四旋翼无人机模型,须建立惯性坐标系{xe,ye,ze}和体坐标系{xb,yb,zb},如图1所示。其中{F1,F2,F3,F4}和{ω1,ω2,ω3,ω4}分别是无人机4个电机向上的升力和转速,{φ,θ,ψ}分别表示无人机的横滚角、俯仰角、偏航角。

图1 四旋翼无人机坐标体系示意图Fig.1 Diagram of coordinate system of four-rotor UAV
忽略空气阻力,参考文献[16]引入模型:
(1)
式中:Ix、Iy、Iz分别为坐标系x、y、z轴的转动惯量,l为旋转子与无人机质心之间的距离,m为无人机的质量,g为重力加速度,di(i=1,2,…,6)为不确定的外部干扰,Ui(i=1,2,3,4)分别为高度、横滚、俯仰和偏航通道上的控制力矩。
假设1无人机整体几何中心是无人机的重心,其飞行速度低,不考虑气动效应的影响。

假设3系统中的所有状态参数均可测量。
当四旋翼无人机在长时间处于飞行模式,容易引起故障,此时外界的干扰会加剧系统的不稳定[17]。当无人机出现故障的情况下,由此引起执行器机构的失效。把机构失效间接转化为控制输入的损失,将其作为故障因子以乘积的形式加到无人机模型中[18]。将式(1)改进后得到
(2)
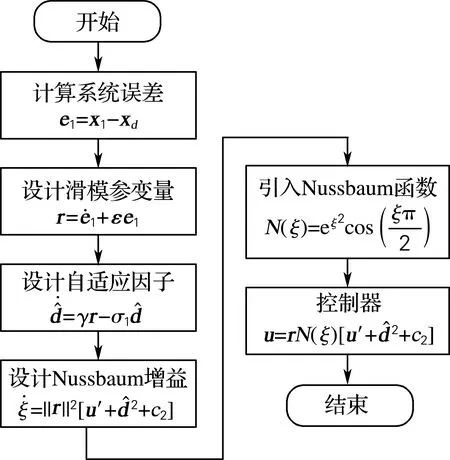
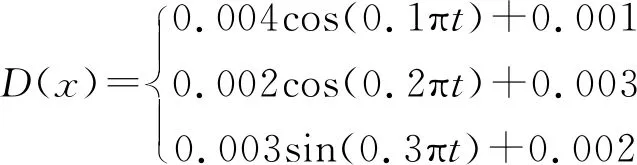
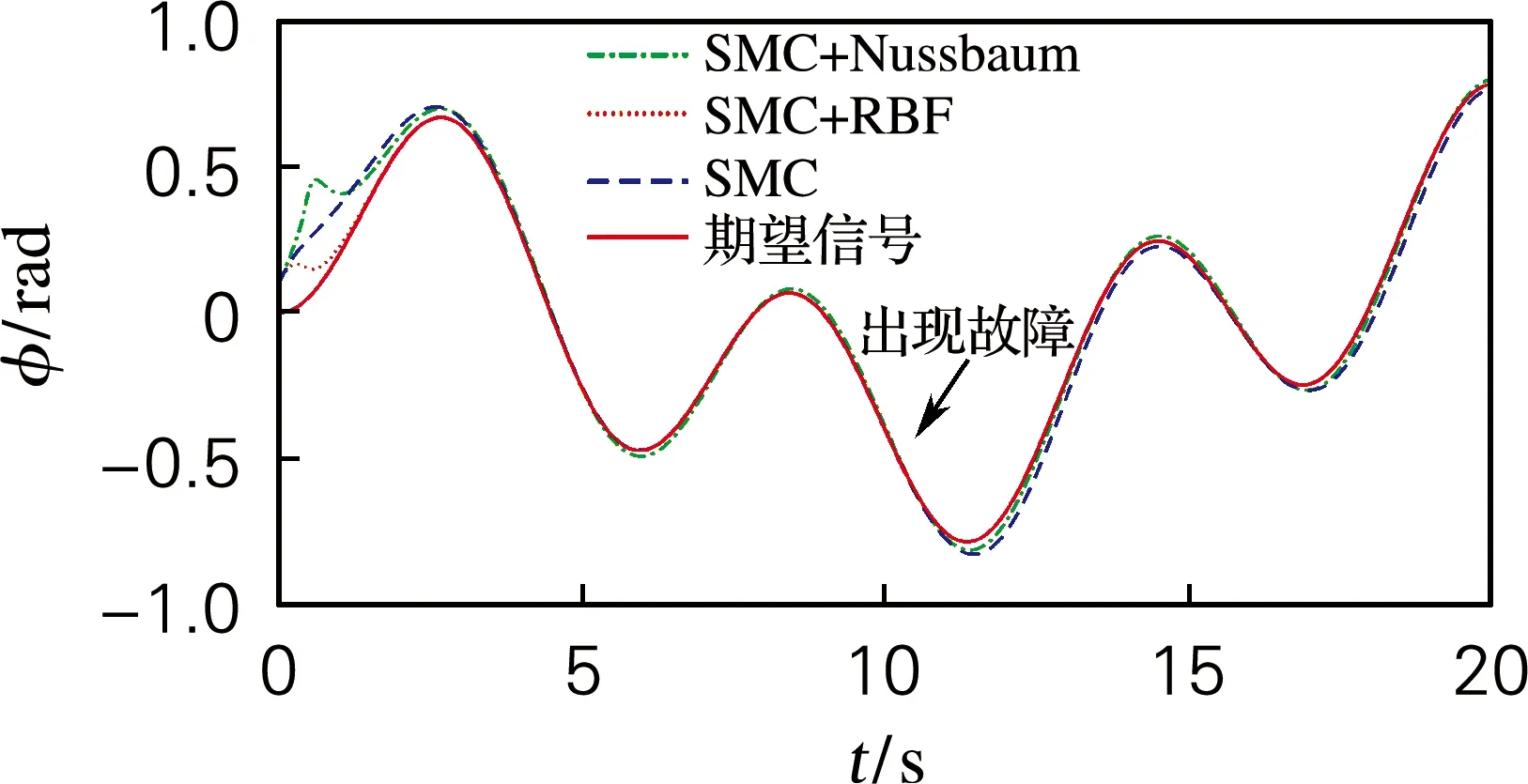
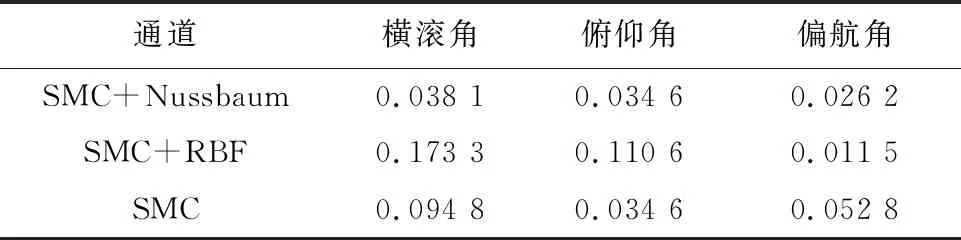
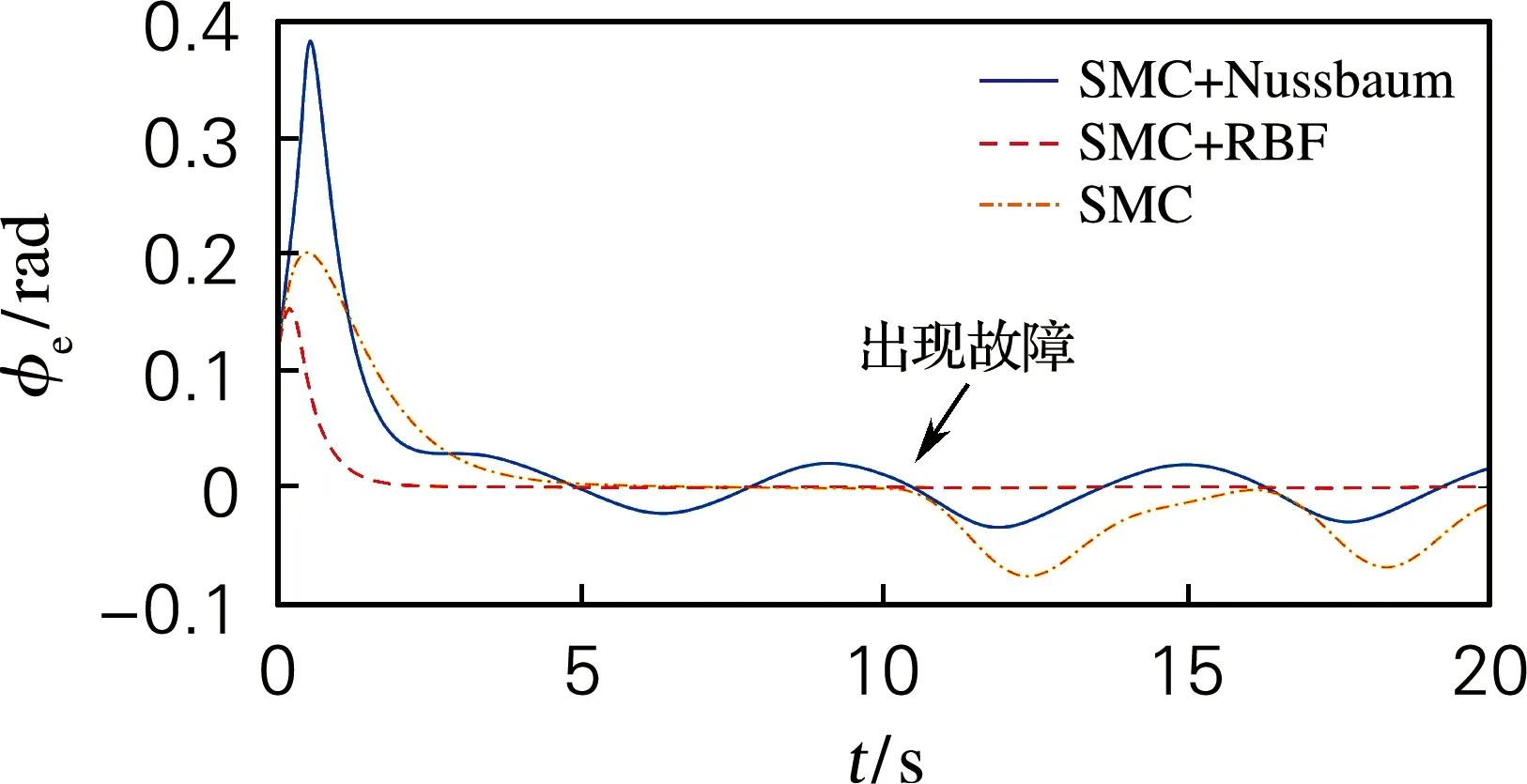
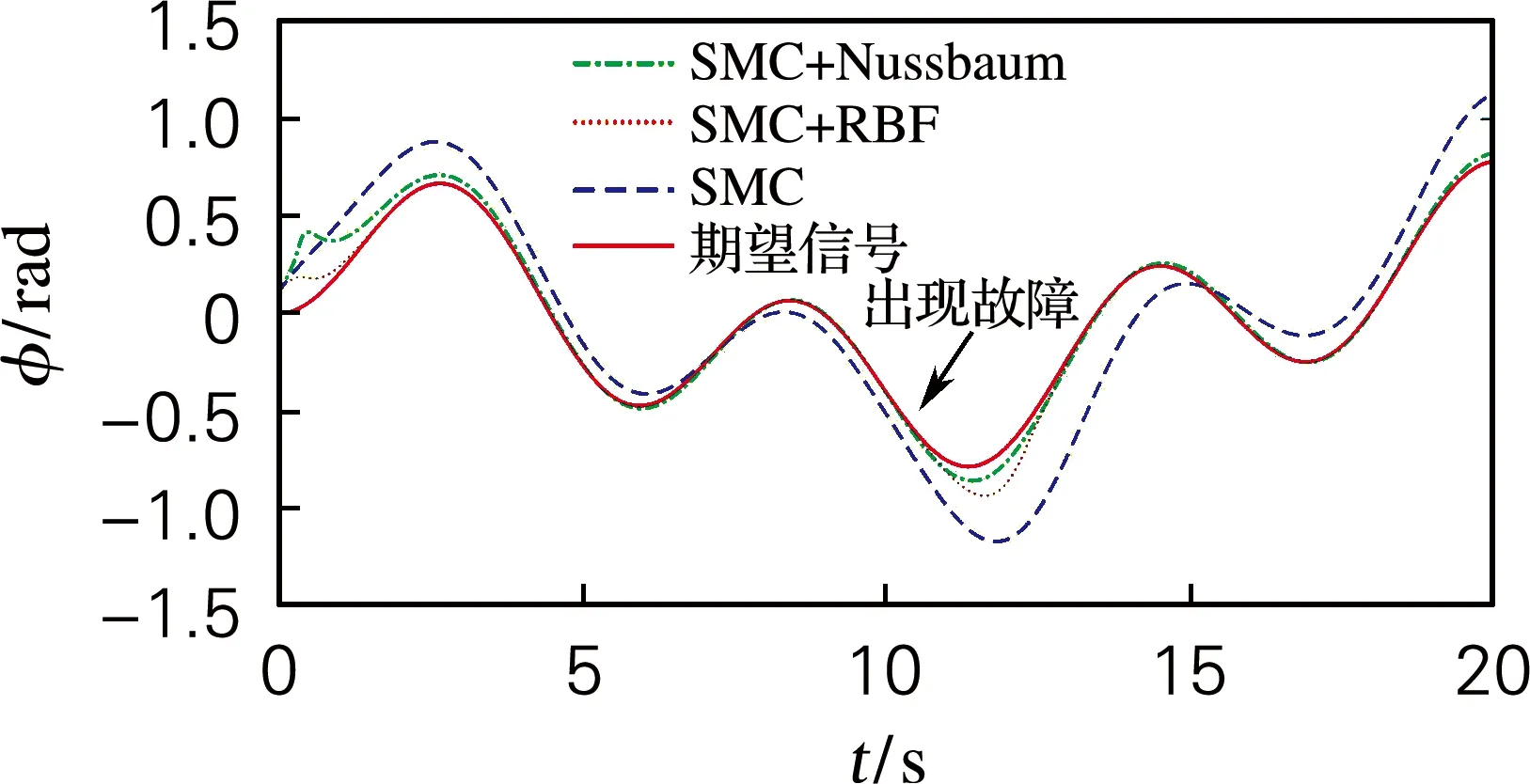
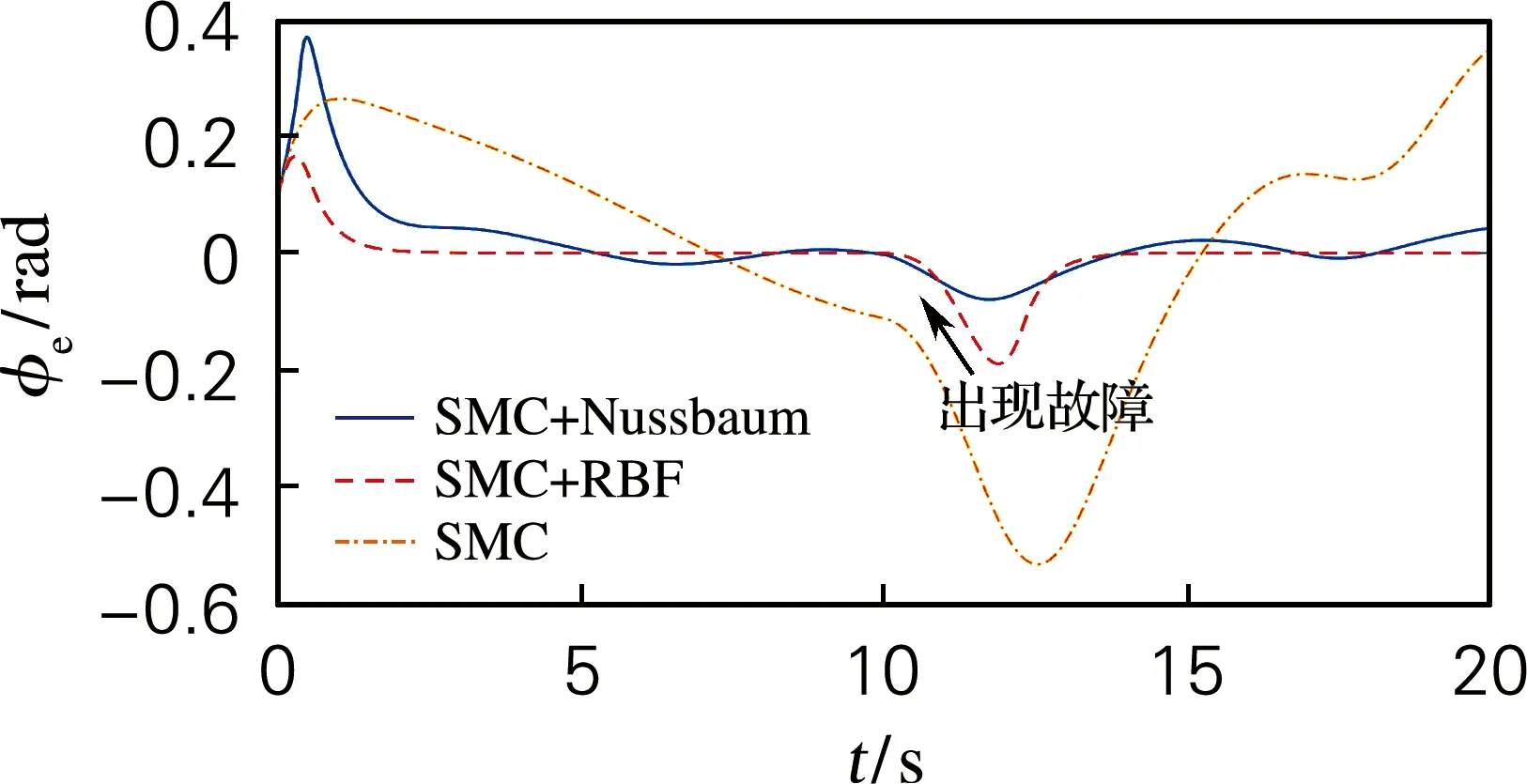
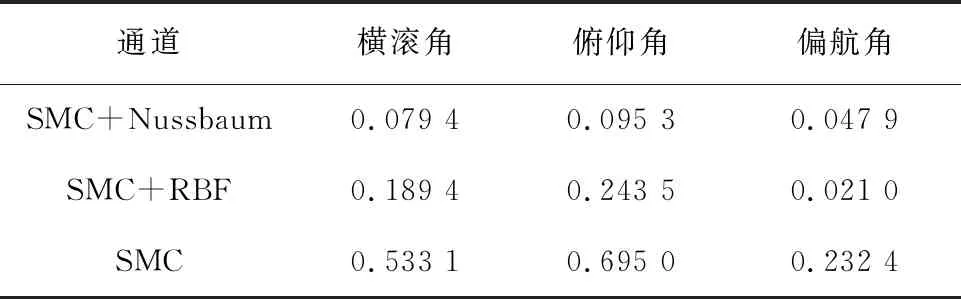
式中:状态x1=[x11,x12,x13],x2=[x21,x22,x23];扰动d=[d1,d2,d3]。bi(i=1,2,3)为执行机构的效率损失折合为控制输入的损失系数,0 为了便于后续研究,将转动惯量和损失系数的乘积g(x)bi看作一个整体未知参变量G(x)。将式(2)整理后得 (3) 为了解决不确定矩阵G(x),在控制器引入Nussbaum增益函数。 任意连续函数N(s),满足下列属性,就称其为Nussbaum增益函数。 (4) (5) 选择如下形式的Nussbaum增益函数: (6) 引理1[19]∀tf∈R,在区间[0,tf)内定义光滑函数V(·)和ζ(·),且V(t)≥0,∀t∈[0,tf),N(·)是光滑的Nussbaum增益函数。如果满足不等式 (7) 引理3[21]对于任意正数Kb∈R,任意矩阵Z∈R,且满足∣Z∣ (8) 控制目标:在G(x)和d未知的情况下,设计一个自适应滑模控制器,使输出状态x1能够跟踪期望信号xd,并保证闭环系统所有信号有界且系统误差e1=x1-xd满足范围内约束。其设计自适应滑模控制器的算法流程如图2所示。 图2 算法流程图Fig.2 The flow chart of algorithm 为了实现控制目标,将系统误差定义为 e1=x1-xd (9) 式中:对于期望给定信号xd=[xd1,xd2,xd3],存在正常数kdi(i=1,2,3)满足|xdi| 根据系统模型见式(3),系统误差一阶导数和二阶导数为 (10) (11) 设计一个滑模参量r来描述系统误差变化,将r定义为 (12) 式中:ε为滑模参变量,ε>0。 对式(12)进行时间求导得 (13) 为了设计滑模参变量控制器,选用李雅普诺夫函数: (14) 给出的李雅普诺夫函数的时间导数为 (15) 代入式(10)~(13)得 (16) 根据young不等式[21],可建立以下关系: (17) (18) (19) (20) 式(16)进一步可表达为 (21) 控制器选择为 (22) (23) (24) (25) 式中:c2>0、γ>0、σ1>0是待设计参数,将式(22)~(25)带入式(21)得 (26) (27) 带入式(26)化简: [α(x)N(ζ)+1] (28) 为了分析方便,定义: (29) (30) 利用c3、c4定义简化(28)式可得 (31) 在区间[0,t]内积分得: (32) 综上所述,闭环系统的信号均为有界的,可以得出结论,闭环系统是渐进稳定的。 定理1执行器故障下的无人机系统模型,设计控制器如式(22)~(25)所示,若满足假设1~3,则系统满足输出约束条件且所有信号均有界。 证明定理: 为了系统初始误差满足|e1i(0)| (33) 根据式(12)可得 (34) 对式(33)进行时间求导,将式(34)带入,得 (35) (36) 对式(36)进行积分: (37) 将式(33)带入式(37)得 (38) 求得误差界限为 (39) 已知期望信号xd的给定范围为|xd| -Kb-Kd (40) 定义Kb+Kd=A,状态x1范围表示为|x1| 由式(39)可知,跟踪误差的精度取决于参数ε,当参数ε选取较大时,跟踪误差将会很小,但过大的参数ε又会引发控制信号的幅值增大和高频振动,在实际应用时需要通过试凑法找到满足控制精度同时又不会导致控制信号高频振动的参数ε。 使用Simulink仿真平台,来验证本文设计的控制器的有效性和自适应能力。其中,所设计的控制器仿真需要的具体参数如表1所示。 表1 模型参数以及初始化参数Tab.1 Model parameters and initial parameters 目前针对四旋翼无人机的容错控制以及抗扰动研究的主流控制算法有鲁棒控制算法[3]、自适应控制算法[7-8]以及滑模控制算法[12,15],其中基于滑模算法的相关控制方法对系统参数变化和外界扰动不灵敏,无须系统在线辨识。便于工程实际应用且算法复杂度低容易实现,更具有代表性。所以,将设计的基于Nussbaum增益函数的自适应滑模控制器(SMC+Nussbaum)与Shi等[15]提出的基于神经网络的自适应滑模控制器(SMC+RBF)和刘凯悦等[12]使用的滑模控制器(SMC)进行仿真对比,观察不同控制器对期望信号(Reference Signal)的跟踪轨迹和跟踪误差。 为了证明控制器在应对突发时变故障时跟踪效果的优越性。选择相同期望信号角度:φd=0.8×sin(0.7t)×sin(0.4t);θd=0.8×sin(0.7t);ψd=0.5×[1-sin(0.6t)]×sin(0.7t)。控制器参数:ε=1.5,c2=3.5,σ1=10,γ=1.5。 主要研究内容是控制器在时变故障下能更好地适应环境,在较短时间内对其做出估计和补偿,使误差保持在平衡点附近邻域[-0.1,0.1]内,恢复控制系统进行有效跟踪。针对上述3个控制器,分别做两个仿真实验,通过增加故障和外界干扰程度,来观察每个控制器的跟踪效果。 仿真1在执行机构小部分失效和存在较小的外部干扰的情况下: (41) (42) 仿真将模型始终处在时变扰动中,在第10 s,执行器出现部分失效。图3表示3种方法对期望信号的跟踪轨迹对比。图4分别表示3个通道的跟踪误差。从图5可以看到,所设计的控制器在开始跟踪时有较大的超调量,但是可以在有限时间内快速做出响应达到跟踪稳定。在出现突发故障时,跟踪误差始终保持在平衡点附近的邻域内。 (a) 横滚角 基于神经网络的滑模控制算法,在开始跟踪时,跟踪速度较快,更能达到无误差效果。但是当突发时变故障时,跟踪效果变差,出现较大的波动。而自适应滑模算法在出现故障时,跟踪误差同样存在较大超调量,跟踪速度较慢。 表2为出现故障时,3种控制算法分别对3个通道跟踪误差的超调量数值。由表2的数据可以看出发生突变故障时所提出的控制算法超调量较小,对{φ,θ,ψ}的跟踪上有着更好的效果。 表2 轻微故障和扰动下误差超调量Tab.2 Error overshoot under minor faults and perturbations rad 仿真2在执行机构大部分失效和存在较大的外部干扰的情况下: (a) 横滚角 (43) (44) 仿真依旧将模型始终处在时变扰动中,在第10 s开始执行器开始部分失效。此次,增大了外界扰动和失效程度。图5表示在严重故障失效和干扰的情况下,无人机的跟踪轨迹情况,图6表示3个通道的跟踪误差。 (a) 横滚角 在开始跟踪时,所设计的控制器跟踪效果虽有小幅度波动,但是在5 s左右消除外界干扰的影响,恢复稳定的跟踪控制。在故障出现初期,有较大的跟踪误差,主要由于控制力矩不能完全作用于无人机上,但通过短时间的调整,系统跟踪误差又回到了设计精度范围内,这主要是由于控制器中的Nussbaum增益发挥了功效,补偿了系统所丢损失掉的功率。而在受到突变故障时,带有神经网络的滑模算法的跟踪误差有着较大的超调量。自适应滑模算法响应速度过慢、跟踪误差变大,已经无法准确跟踪到期望信号。相比之下,所设计的控制算法,在受到严重失效的状态下,可以在短时间内做出相应。依旧保证3个通道的误差精度在平衡点附近邻域内。表3表示出现严重失效故障时每种控制算法对3个通道跟踪误差的超调量数值。可见,所提出的控制器其适应外界突发状况的能力相比之下更优越。 (a) 横滚角 表3 严重故障和扰动下误差超调量Tab.3 Error overshoot under maximum faults and disturbances rad 和仿真1的图表对比,可以看出即便是增加了外界干扰和失效程度。在开始跟踪时,所设计的控制器仍旧在5 s左右实现稳定控制。系统在设定10 s开始引入部分失效时,系统可以在短时间内调整,使得跟踪误差一直在平衡点附近的邻域内,不影响无人机正常运作。由两个仿真情况对比可以得出,所设计的控制器相比另外两种方法,在突发时变故障情况下有着较强的适应突发故障的能力和良好的跟踪效果。 为了解决时变故障下无人机姿态跟踪的问题,设计一种自适应滑模容错控制器。引入Nussbaum增益函数和自适应滑模因子来补偿无人机系统故障所损失掉的功率和外界的干扰,从而实现无人机的姿态跟踪。通过增加故障和外界干扰程度,将设计的控制器同其他现有控制算法同时进行仿真实验。所设计的控制器在5 s左右可消除外界的扰动,恢复系统的正常跟踪。当出现突发故障时,系统能短时间做出响应,4 s左右恢复正常跟踪。且跟踪误差保持在平衡点附近邻域[-0.1,0.1]内,保证无人机不受故障影响,安全飞行。所设计的控制器有良好的容错能力和较强的鲁棒性。该研究结果将对无人机飞行控制系统领域提供理论依据。

2 自适应滑模控制器设计





3 跟踪误差的稳定性分析


4 Simulink仿真

5 结 论