精密三角高程在高铁水中墩沉降观测中的实验分析
2021-06-07廖振修高旭光曹品
廖振修,高旭光,曹品
(安徽建筑大学 土木工程学院,安徽 合肥 230601)
为保证线路的平直性和平顺性,节约建设占地,我国高速铁路基础建设多采用桥梁和隧道的建构形式,其中尤以高架桥梁比例为重。为确保桥梁自身稳定性,无论是处于工程施工阶段,还是工后营运阶段,都需要对作为核心承重部件的桥梁墩台进行沉降变形观测。依据国家《建筑变形测量规范JGJ 8-2016》和《铁路工程测量规范TB 10101-2018》,对桥梁墩台的沉降变形观测需要采用二级变形监测技术标准执行,与国家二等水准的测量精度相当,一般情况下采用二等水准测量即能满足。但是,在水系发达的江南地区,江河湖面宽广,不少大跨度桥梁墩台落在水中形成“水中墩”,无法采用二等水准测量进行观测,必须采用经过现场验证的改进精密三角高程测量方案进行替代。
三角高程测量相较于普通水准测量,在山区高程获取,以及水准测量无法开展的一些特殊工程应用场景,具有原理简单、操作简便和实施高效等优点,已经在工程实践中广泛应用。但由于大气折光、地球曲率这两项误差的影响,三角高程测量能否达到三等水准甚至二等水准的高精度要求,尚无定论,需要具体问题具体分析。目前已有不少文献结合具体工程场景对精密三角高程测量进行研究和总结,黄满太结合高边坡工程对精密三角高程测量进行了较为全面的研究;杨雪峰等尝试采用一种改进的端头设站三角高程上桥测量方法来替代二等水准测量,以提高高铁桥梁工程中高程联测上桥的效率;张腾飞等在长距离一等跨河水准测量中对精密三角高程方法进行了验证。应用精密三角高程解决大跨度水中墩高程测量问题的文献不多,蔺爱军采用改装后的双全站仪同时对向观测方法,对高铁水中墩测量进行了研究总结,但该方法对设备和工程现场条件要求较为苛刻,应用难度较大。本文以商合杭高铁巢湖段某工程项目中的跨河桥梁水中墩沉降观测为工程背景,探讨一种改进的精密三角高程测量方案,以期为高精度三角高程测量的研究和应用提供有益的探索和借鉴。
1 方法分析
1.1 精密三角高程测量方法及精度分析
三角高程测量方法是一种通过三角函数把原始量测斜距换算成垂直距离的间接测高方法。如图1 所示,为了求得地面上O、A 两点的高差h,可在O 点设站架设电子全站仪,在A 点架设反射棱镜,实际量测斜距S,竖直角β,仪器高h和棱镜高h,由公式(1)可求得h。

图1 三角高程测量原理图

公式(1)是三角高程测量的原理计算式,实际工程中只适用于精度要求不高的场景,如土石方工程量算中的应用。实际环境下全站仪发射的测距光在空气中要发生折射,水准面也不是水平面而是不规则的曲面(如图2 所示),因此要以较高的精度获得h,在公式(1)中必须加入球差和气差改正项,得到精密三角高程测量计算式(2)。

图2 精密三角高程测量原理图

式中: f 为两差改正;r 为气差改正;p 为球差改正;k 为大气折光系数;R 为地球平均曲率半径。由(2)式可以进一步得出精密三角高程测量的精度评价公式(3)。

由(3)可知,影响三角高程测量精度的因素,主要来源于“测距误差”、“测角误差”、“量高误差”(仪器高和棱镜高)、“大气折光误差”,要提高测量精度,也主要从这四方面入手。同时竖直角β 和测量距离m不能太大,以免放大测角误差和测距误差。
1.2 改进的精密三角高程测量方法及精度分析
公式(3)中,仪器高量测误差m和棱镜高量测误差m是人为误差项,实际工程中精度难以控制,这是导致普通三角高程测量无法替代二等水准测量等精密水准测量的主要原因之一。在高铁水中墩沉降观测这一特定的工程场景中,强制对中微棱镜可以直接作为观测目标安置在墩台之上,无需量取高度,消除了棱镜高量测误差的影响;此外作为已知点使用的水准工作基点,在工程现场也非常容易找到,可以通过改进的精密三角高程测量方法——中间设站法——避免仪器高量测误差的影响。如图3 所示,水中墩D1 上的观测点Y1(实际测量由强制对中微棱镜代替,无需量测棱镜高)与岸上监测工作基点A 的高差计算公式如(4)所示。

进而可以得出精度评价公式(5):

由公式(5)可知,改进的精密三角高程测量方法消去了仪器高量测误差m和棱镜高量测误差m的影响,只剩下“测距误差”“测角误差”和“大气折光误差”等三项误差的影响,这给精密三角高程测量代替高精度的水准测量带来了可能。通过采用更高精度的全站仪提升仪器测角精度和测距精度,同时控制测距长度以及竖直角大小对测距误差和测角误差的放大效应,并且选择大气折光影响小(大气密度分布稳定)的时段进行测量作业,是有可能达到二等水准测量等级的精度要求的,但是不同的区域要根据具体情况编制具体的监测方案,通过实验验证能够达到精度要求才能实施。
2 实验验证
2.1 实验方案
商合杭高铁巢湖段有多座跨越河流及大型坑塘的桥梁,由于河面跨距较大,无法采用二等水准测量方案进行沉降观测。图3 所示为特大型的5跨跨河连续梁桥,是其中较为典型的一座,中间3跨(D1-D2,D2-D3,D3-D4)跨距超过110 m,靠近两岸的东西两跨跨距也近90 m。本文以此为例,讲述应用改进的精密三角高程测量方法进行水中墩沉降观测测量方案。
如图3、图4 所示,在东西两岸合适的位置,以强制对中观测墩的方式,布设工作基点A、B 和固定设站点O1、O2,要求在测站点O1、O2 架设仪器时,仪器测距中心与前后两观测标大致等高,距离大致相等。在水中墩与桥梁中线垂直的一侧适当高度位置,修建测站架设平台和强制对中微棱镜观测标,要求测站架设平台在架设仪器后,仪器测距中心与前后两观测标大致等高,距离大致相等(水中墩左右两侧都有观测标,观测方案相同,但布网彼此独立,本文仅以右侧观测网为例)。
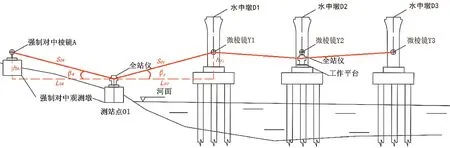
图3 高铁水中墩三角高程测量原理示意图
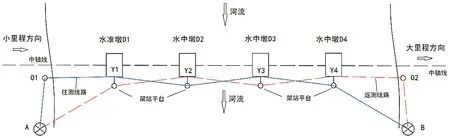
图4 高铁水中墩三角高程测量线路布设示意图
工作基点A、B 与东西两岸其他工作基点独立组成二等水准基准网,经严密平差及稳定性评估后,作为已知点参与跨河连续梁桥精密三角高程监测网的组建。外业观测时,首先在固定站点O1、D2 架站平台和D4 架站平台上设站,观测A、Y1、Y3 和B 等4 个强制对中观测标两两间的高差;再在固定站点O2、D3 架站平台和D1 架站平台上设站,观测B、Y4、Y2 和A 等4 个强制对中观测标两两间的高差,形成往返两条观测线路。实验使用的全站仪型号为测角标称精度0.5″,测距标称精度为(1+1ppm×D)mm 的瑞士徕卡TM30。为减少人为瞄准误差,启用仪器的自动瞄准功能并自动进行测站内多测回观测;为减少大气折光误差,外业观测选择在阴天或日出后2 小时至日落前2小时期间(夏天晴日需要剔除中午前后大气折光变化剧烈的时段),观测目标成像清晰稳定时进行观测,上午和下午各观测一次。实验方案工作流程如图5 所示。
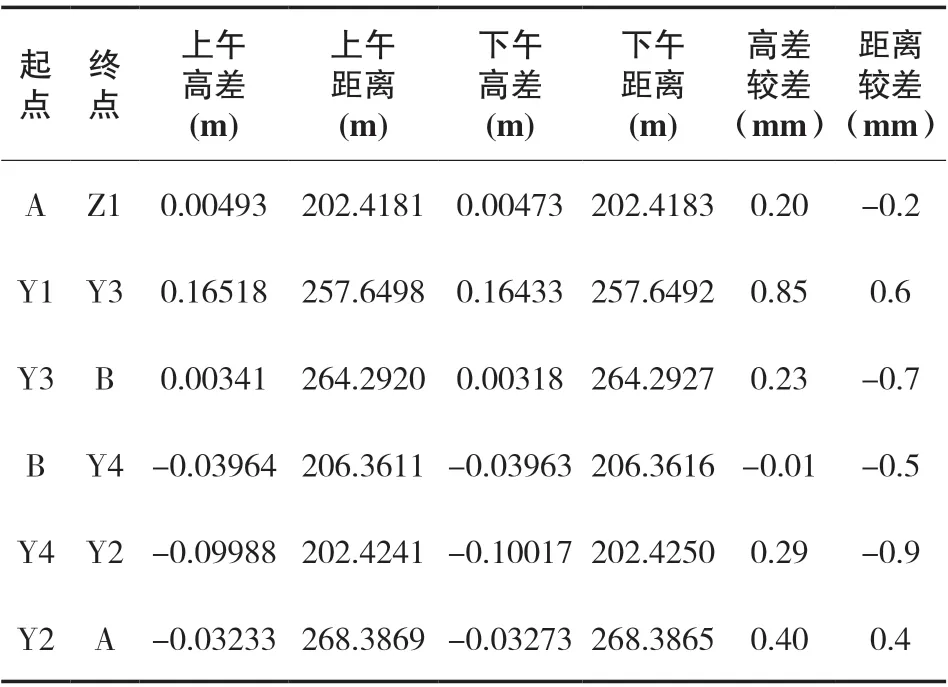
表1 精密三角高程测量原始观测数据表
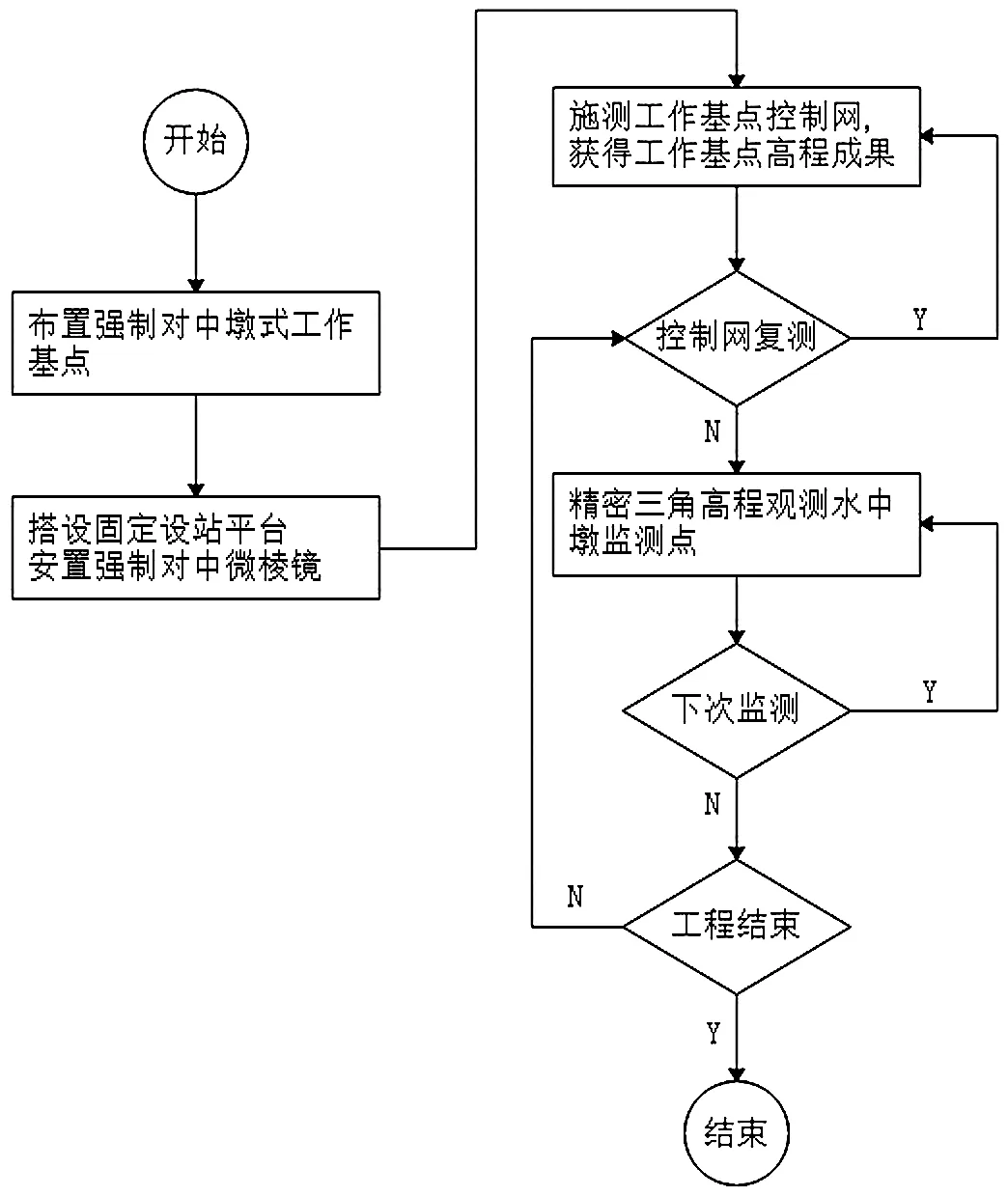
图5 精密三角高程实验方案工作流程图
2.2 实验数据分析
各观测标、设站平台和观测墩安置妥当后,依据上述实验方案,采集观测数据,整理后的原始观测数据如表1 所示。
将上述原始观测数据导入平差软件(武汉大学科傻(COSA)平差软件V6.0)进行严密平差,平差成果如表2 和表3 所示。
表2 和表3 显示,本次实验数据处理结果中,最大高差中误差为0.38 mm,最大高程中误差为0.38mm,满足《建筑变形测量规范JGJ 8-2016》和《铁路工程测量规范TB 10101-2018》规范中二级变形监测相应的技术指标要求(线路高差闭合差小于,测站中误差小于0.5mm,高程中误差小于1.0mm)。
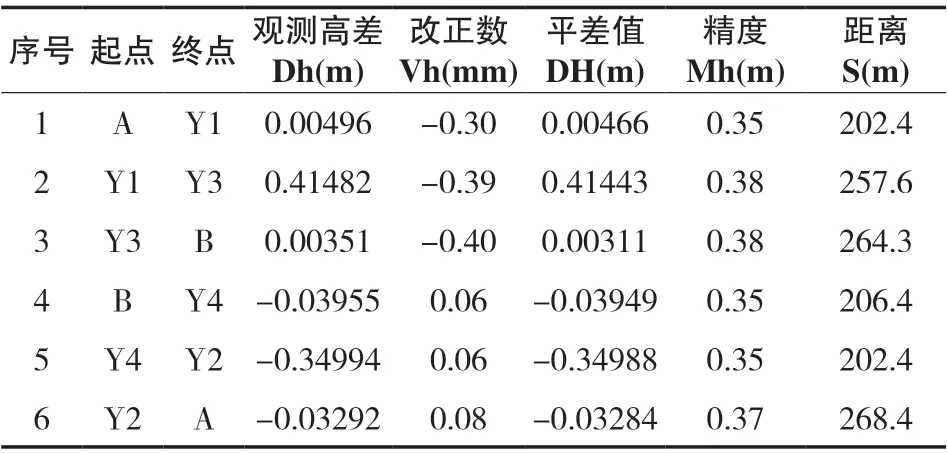
表2 精密三角高程测量高差平差成果表

表3 精密三角高程测量高程平差成果表
2.3 实验结论
实验结果证明,在保证一定仪器精度的设备条件下,采用改进的精密三角高程测量方法消除仪器量高带来的影响,采用改造后的无需量测棱镜高的强制对中微棱镜作为监测点观测标,在合适的观测时段进行外业测量,经专业测量平差软件进行严密平差处理后,是可以达到二等水准测量的精度水平的。实验所采用的瑞士徕卡TM30 电子全站仪是一款广泛用于变形监测工程项目的成熟工程测量设备,实验环境为工程项目施工现场,实验方案在实验结果通过评估并报批后,应用到了工程项目中相应的水中墩沉降观测工作中,取得了令人满意的观测成果,保证了工程项目安全顺利进行。
3 结束语
随着我国高铁建设技术快速发展,大跨度的连续梁桥也越来越多的出现。在江南水系发达地区,不可避免地会有不少桥梁墩台落在水中形成“水中墩”,这给桥梁墩台的变形观测带来了困难。本文以商合杭客运专线高铁巢湖段某座横跨河流,有5 个水中墩的特大型连续梁桥为例,设计了采用改进的精密三角高程测量方法对水中墩进行沉降观测的测量方案,并通过实验验证了在满足一定的观测条件下,可以达到二等水准测量的精度要求,解决了常规水准测量无法对大跨度水中墩进行沉降观测的难题。
