半挂铰接列车山区高速路段协同水平分析
2021-06-01束海波邵毅明万远航
束海波,邵毅明,万远航
(1.重庆交通大学 机电与车辆工程学院,重庆 400074;2.重庆交通大学 交通运输学院,重庆 400074)
0 引 言
山区纵坡道路设计方法能够突破自然地形的限制,在局促的空间内有效克服高程差,是提高区域道路通行能力的有效方式。不同于平原高速公路,半挂铰接列车在纵坡路段普遍存在动力不足等缺陷,与现有山区高速公路设计预期存在协同水平低的结构性矛盾,易引发车辆追尾、侧向刮蹭事故。因此,研究半挂铰接列车在山区高速公路纵坡路段的真实运行状态,对于完善纵坡路段设计、提高车辆运行安全具有重要的意义。
纵坡设计(坡长与坡度)是公路几何设计中的重要组成部分,也是现阶段协调车路矛盾的关键所在。文献[1]从驾驶行为、车辆设计、道路特征及速度管理视角梳理了大型车辆行驶安全问题,并给出了相关解决对策;文献[2]分析了坡度及坡长对载重货车运行特性的影响;文献[3]以纵坡实车断面实测速度为基础,构建了重载货车长、大冲坡速度预测模型;文献[4]通过采集货车运行数据,分析了高海拔地区货车运行车速影响因素。而在公路路线设计规范[5]中,主要以中型货车(比功率8.3 kW/h)为代表车型,提出了不同速度折减量下的临界坡长值以及组合坡段的等效纵坡值。
此外,部分学者也通过车辆动力学仿真,从道路特征及驾驶行为层面研究对车辆运行安全的影响,以期望能够从车速管控等层面上改善车辆行车安全。文献[6]采用蒙特卡罗可靠性分析法,研究了山区路段不同坡度、车速和装载质量对行车安全的影响;文献[7]基于ADAMS车辆仿真动力学软件,对山区道路大型车辆运行适应性进行了分析,并对道路参数提出了靶向性改善措施。
上述成果为推动山路高速路段行车安全管理起到了一定的效果,但研究对象大多以中型货车(比功率8.3 kW/h)为主导,与现阶段半挂铰接列车主流货运发展趋势不符,车与路存在“协同水平低”的结构性矛盾仍待解决。其次,高差起伏频繁是山区高速道路的典型特征,以往研究多以平均坡度为假设前提,无法准确掌握山区高速路段半挂铰接列车真实运行状态,难以在道路管控层面提出靶向性改善措施。
基于此,本文开展半挂铰接列车山区纵坡路段实车试验,通过采集自然驾驶车辆运行参数,剖析车辆纵向行驶特性及临界坡长变化特征,检验半挂铰接列车与山区高速道路设计目标协同水平,为纵坡道路设计、车速管控及车-路协同仿真提供基础数据和科学依据。
1 试验设计
1.1 试验车辆
科学选取试验车型是客观反映纵坡路段货运车辆运行方式的关键,鉴于西部物流运输车型构成复杂,性能差异较大,根据G42川渝高速路段主要收费站调研信息,选取主要代表车型东风天龙+半挂通华组合车型作为试验车型,其驱动形式为6×2,满载质量为49 t。
试验车辆如图1所示,车辆主要参数见表1所列。

图1 试验车辆
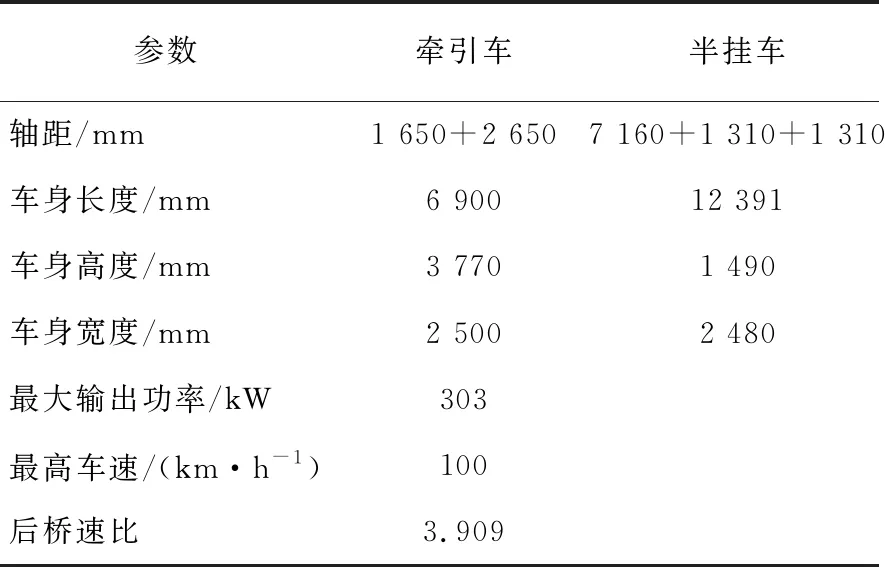
表1 试验车辆主要参数
1.2 试验路段
在重庆市万州区、开州区、梁平区内选取3处试验路段,每处路段均由多段纵坡单元组成,纵面线形变化丰富。
试验路段主要技术指标见表2所列,道路线形如图2所示。试验过程中为保证试验对象路面状况良好,在试验选择时期主动避开雨天、浓雾等恶劣天气条件。

表2 试验路段主要技术指标

图2 试验路段具体线形
1.3 试验设备及流程方法
试验环境及设备如图3所示,通过航姿测量系统(惯性测量单元和DGPS组合)记录车辆行驶速度及道路高程曲线变化,同时在车辆前、后各装载1个行车记录仪,用以监测半挂铰接列车行驶过程中的环境变化。
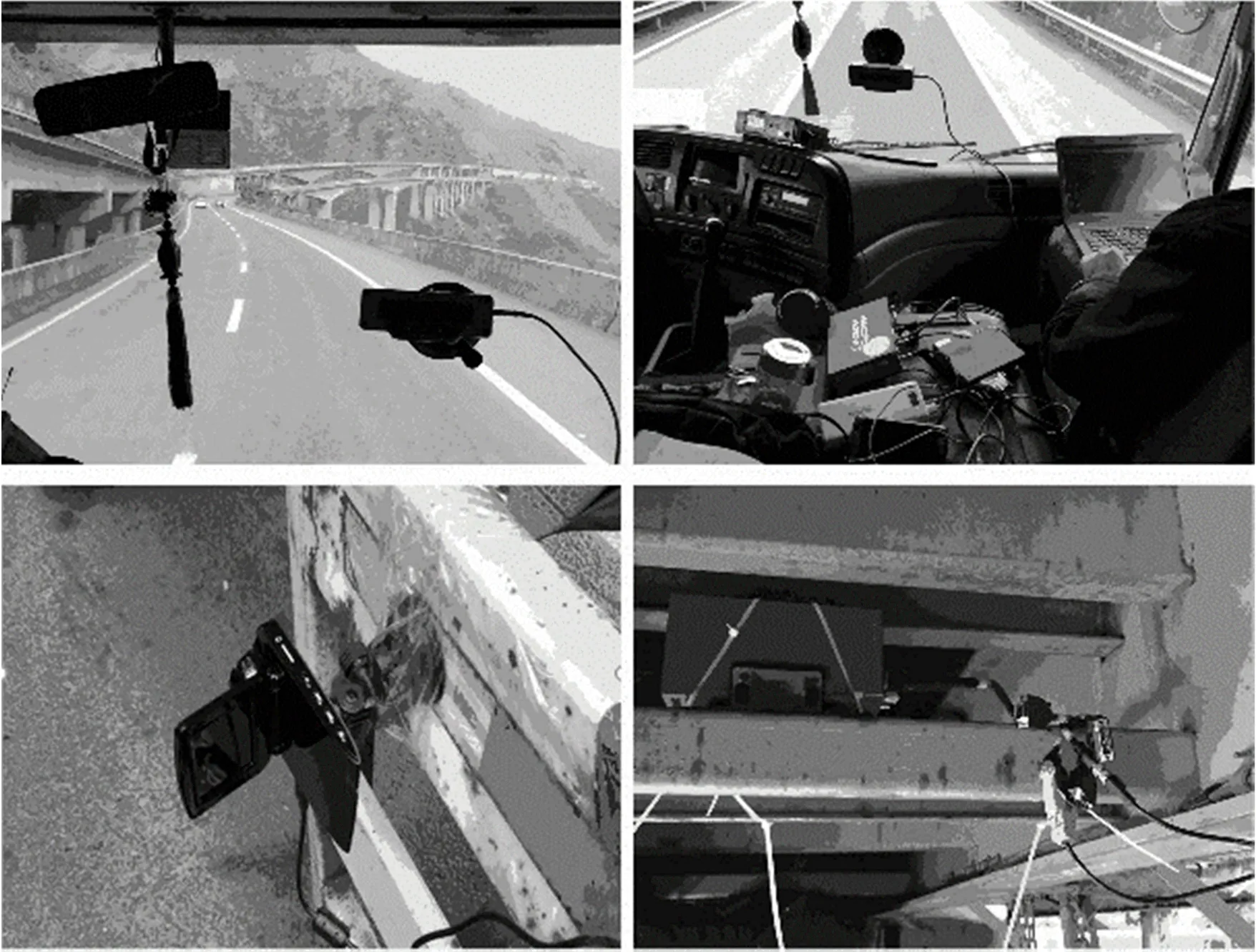
图3 试验环境及设备
试验开展前,根据实地调研及道路图纸信息,先期拟定车辆行驶路线并记录纵坡路段位置信息,行驶过程中,试验人员通过高德地图获取试验车辆与纵坡路段距离,当车辆靠近标记路段时,记录行车记录仪与航姿测量系统工作时刻,便于后期数据标定。整个试验过程中,不对驾驶人提出任何要求,也不进行任何暗示,即最大程度维持驾驶人山区高速纵坡路段自然驾驶习惯。
2 上坡路段速度变化特征
道路设计速度是控制纵坡路段外观形态和运行性能的核心参数,本节基于自然驾驶实车数据,剖析半挂铰接列车连续速度及平衡速度变化规律,明晰纵坡路段不同衔接单元行车速度变化特征,进而检测纵坡路段半挂铰接列车行驶性能与道路设计目标协同水平。
2.1 试验车爬坡连续速度变化特征
为明晰半挂铰接列车纵坡路段连续速度变化特征,截取各试验路段自然驾驶数据样本,提取冲坡范围内车辆连续速度及道路高程数据,并叠加到一起绘制成曲线。部分试验爬坡路段数据处理结果如图4所示,其中路段1平均坡度为1.3%,路段2、路段3分别为3.9%、4.0%。
从图4可以看出:在进入上坡路段后,半挂铰接列车连续速度呈现逐级递减的趋势;当道路平均坡度较小时,车辆车速能够维持在最低容许车速之上;而当道路平均坡度较大时,车辆不仅严重偏离路段设计车速(80 km/h),与最低容许车速(50 km/h)也存在较大偏差,说明现阶段半挂铰接列车动力性能存在不足,无论对道路通行能力或是行车安全均存在较大的隐患。
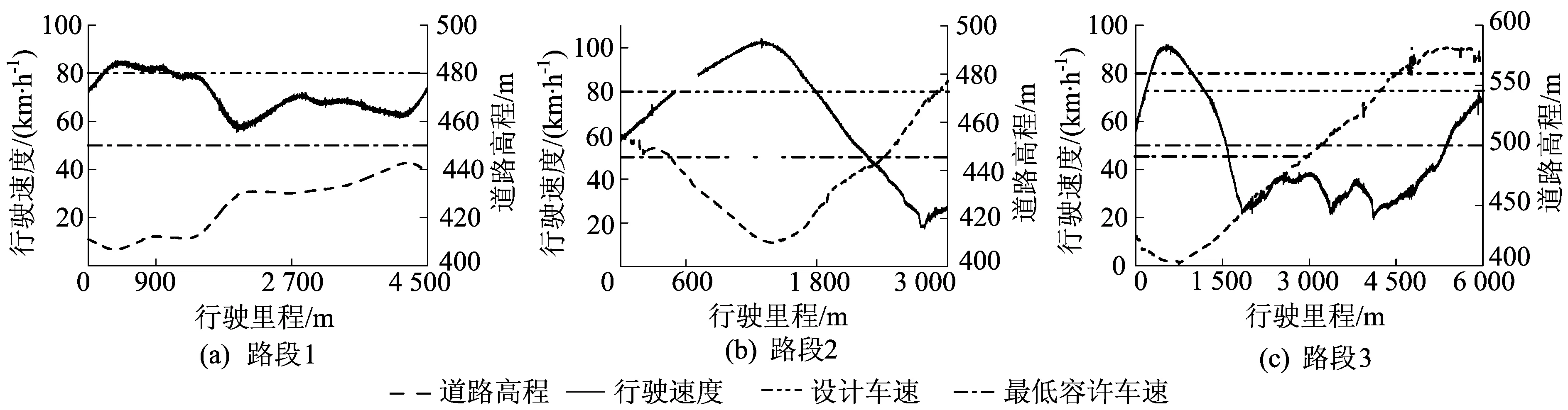
图4 部分爬坡路段实测数据
此外,纵坡路段1~3中车辆最低车速分别为59.10、18.17、22.70 km/h,与路段平均坡度大小排列顺序不符。基于此,根据设备所采集道路数据,以每行驶里程50 m划分路段单元,求解各纵坡路段局部坡度,并筛选出局部坡度最大值,具体结果见表3所列。
由表3可知,路段2具备最大的局部坡度路段,路段3次之,路段1最小。究其原因在于,山区纵坡高速公路坡度并不是固定不变的,在局部路段可能存在远大于平均坡度的单一纵坡,进而导致半挂铰接列车爬坡速度进一步下降。因此,在道路速度管理层面上,道路交管部门不能简单地根据道路平均坡度直接设定车辆限速值,对于局部最大纵坡路段,应根据半挂铰接列车与其他车辆速度差值情况,合理调整限速范围、采用轿货分离策略,条件允许情况下应增设爬坡车道。
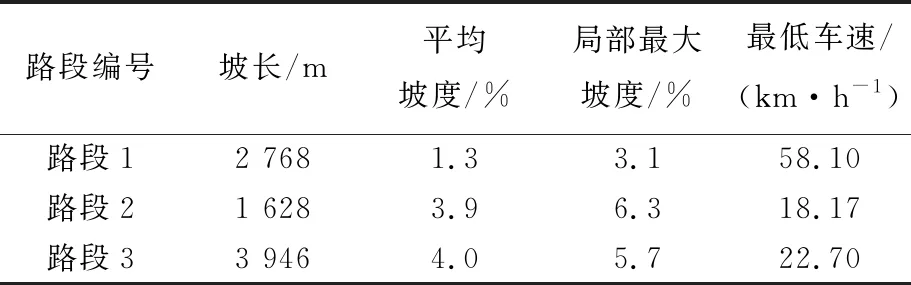
表3 试验路段局部坡度数据
2.2 试验车平衡车速变化特征
车辆爬坡性能是纵坡路段设计和车速管控的关键参数。
为明晰半挂铰接列车各坡度下的爬坡性能,对车辆爬坡过程中的速度曲线在其幅值稳定或波动较小情况下,通过下式对该路段车速取均值,得到车辆各坡度下的稳定车速Va,即
(1)
其中:Vi为设备在第i个采集时间段内的速度值;N为速度稳定状态下设备采集的时间段数。
稳定车速计算示意图如图5所示。

图5 稳定车速计算示意图
稳定车速共涉及43个上坡样本,绘制散点图,如图6所示。
从图6可以看出,随着纵坡坡度的增加,半挂铰接列车稳定车速进一步降低,其降幅速度呈现先急后缓的特征,说明在同等坡度递增的情况下,小纵坡路段下的车辆稳定车速变化相关性更强。鉴于此,在对小纵坡变坡点路段进行管控时,道路交管部门应对半挂铰接列车速度变化差值加以考虑。
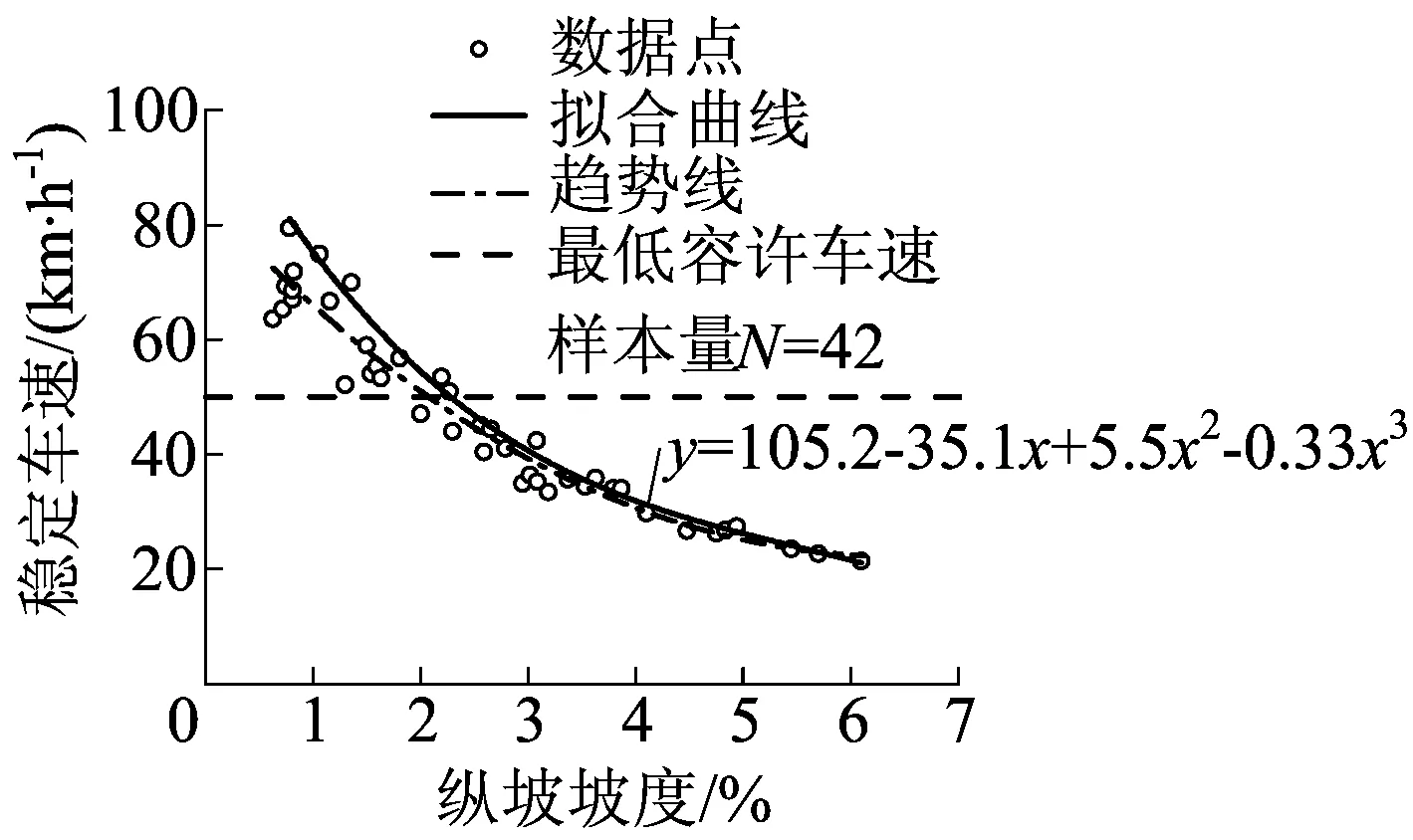
图6 平衡车速试验数据
选取图6同坡度下最大稳定车速数据点进行曲线拟合,由此计算出半挂铰接列车在不同坡度下的平衡车速Vs,并与公路设计规范代表车型平衡车速Vt进行对比[8],具体数值见表4所列。
由表4可知:在坡度小于2 %的上坡路段,半挂铰接列车车速能够维持在50 km/h以上,满足山区高速路段货车通行标准;而当纵坡路段坡度大于3 %时,车速会低于公路设计最低容许车速(40 km/h)。相比于中型货车动力性能,其平衡车速最大降幅达到35 %,动力性能明显更低,鉴于货运主流车型多轴化的发展趋势,道路纵断面设计指标及速度管控有必要根据半挂铰接平衡速度进行相应的调整。

表4 不同车型平衡车速对比
2.3 试验车下坡-上坡衔接路段速度变化特征
驾驶行为是对道路特征的具体表现,当路段坡度发生变化时,驾驶人会采取不同的踏板加速/制动措施来控制车速变化。现有研究大多针对平均坡度进行考虑,鲜有对纵坡相邻路段单元衔接类型与行车速度之间的关联性进行研究。然而车辆在实际爬坡过程中,速度衰减快慢不仅取决于道路特征、车辆动力性能,还与爬坡初始车速呈现高度相关性。因此,明确半挂铰接列车在山区高速下坡-上坡衔接单元路段真实运行状态,对于完善道路车速管控方案、细化车路仿真设定方面显得尤为重要。
根据实测数据,结合行车记录视频,对短下坡-上坡衔接路段单元数据样本进行筛选。半挂铰接列车在部分下坡-上坡衔接路段单元上的速度实测结果如图7所示。
从图7a可以看出,在短下坡路段行驶过程中,半挂铰接列车车速整体呈现增大的趋势,并在坡底时达到最大值。究其原因在于,车辆冲坡是一个动能蓄能过程,驾驶人为降低车辆冲坡难度,在车辆下行过程中常采取挂高挡或挂空挡滑行,保证车辆冲坡前具备一个较大的行驶动能,但该方法仅适用于短下坡-短上坡路段。而对于长上坡路段,半挂铰接列车则会因车速衰减过大,存在越级降挡的情况,对驾驶熟练程度要求较高。因此,在短下坡-长上坡衔接路段,道路交管部门在下坡入口前应设置货车降挡警示标识,降低道路对驾驶人的驾驶要求。
此外,车路协同仿真是改善道路安全的重要手段,现有山区高速纵坡路段仿真研究中,驾驶模式常采用定速巡航控制策略[9]。但由图7b、图7c可知,在短下坡路段行驶过程中,车辆车速控制在80~90 km/h附近,呈现区间分布的状态,即在车辆下行过程中,驾驶人不进行油门踏板操作,仅凭重力势能转化车速,能够有效降低制动器使用频率。

图7 短下坡上坡衔接路段试验数据
因此,在山区纵坡高速道路安全仿真过程中,驾驶模式应采用定速巡航模式(适用上坡路段)和区间车速模式(适用下坡路段)联合求解。需要指出的是,本文区间速度仅适用于短下坡路段,而对于长、大下坡路段,需要根据车辆动力性能及行驶路段所挂挡位再次对区间车速进行划分。
3 半挂铰接列车合理运行临界坡长
由于半挂铰接列车动力性能与中型货车存在较大差距,现有《公路路线设计规范》(JTG D20—2017)中临界坡长指标显然不再适用于半挂铰接列车,进而导致道路管理部门在道路纵断面及爬坡车道设计工作中难以对车路协同矛盾做出有效改善。为此,本文根据自由流状态下的实车试验数据,采用20 km/h的速度折减量作为临界坡长的计算条件[10]。
因为试验路段货车限速值为80 km/h(不包含隧道路段),所以在处理上坡试验数据过程中,以车速80 km/h对应的道路点位作为上坡路段起点,车速衰减至60 km/h时作为上坡路段终点,绘制半挂铰接列车各坡度下临界坡长,结果如图8所示。
从图8可以看出,当上坡路段重载货车设计速度为80 km/h时,根据公路路线设计规范中的通行标准,车辆临界坡长应维持在1 100 m,并随单位坡度增长呈现200 m递减。而从试验数据可以发现,半挂铰接列车各坡度下临界坡长均呈现大幅度降低,在坡度为2 %的山区纵坡高速路段,半挂铰接列车临界坡长幅值波动较大,其余坡度临界坡长相对稳定。
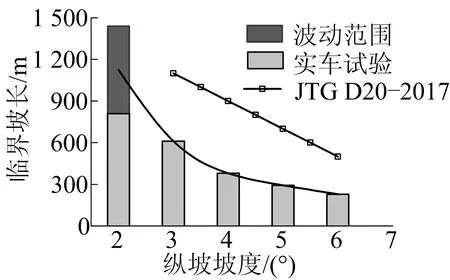
图8 不同坡度下临界坡长
究其原因在于,该坡度下半挂铰接列车车速衰减较慢,无论是在油门踏板踩踏力度或是踩踏持续时间上,驾驶人都具有较大的不确定性,从而加剧了临界坡长的波动幅度。
在纵坡坡度3%~6%范围内,半挂铰接列车临界坡长分别为610、380、293、228 m,相比于公路路线设计规范值,其幅值降低了44.5%~58.1%。因此,对于已建成的纵坡路段,当路段半挂铰接列车流量较大时,道路交管部门可采用本文临界坡长作为爬坡车道划分依据;而对于拟建的纵坡路段,也可作为纵断面设计指标评判依据。
4 结 论
(1) 自由流行驶状态下,半挂铰接列车山区高速纵坡路段行驶速度显著低于《公路路线设计规范》中运行速度推荐模型的计算值,当纵坡坡度大于3%,平衡车速低于山区高速路段最低容许车速(40 km/h)。
(2) 现阶段半挂铰接列车动力性与山区高速路段设计指标存在协同水平低的结构性矛盾,其爬坡性能已不再与公路纵坡路段设计指标相匹配,各坡度下实际运行临界坡长比设计期望降低了44.5%~58.1%。
(3) 在短下坡-上坡山区高速路段,车辆控制车速主要呈现区间分布状态,因此在山区道路仿真时,驾驶模式应采用定速巡航(上坡)和区间车速(短下坡)联合控制,此类路段车速区间推荐采用80~90 km/h。
(4) 目前道路限速管理的路段划分距离较大,在实际路段中存在远大于其平均坡度的单一纵坡路段,针对该特殊路段,道路交管部门应根据路段车流类型及本文技术指标,采取相应的限速或轿货分流措施。
