日本护理机器人“产学官”协同创新实践模式
2021-05-28乌力吉图周威
乌力吉图 周威

摘 要:目前中国社会正在面临人口老龄化和护理人员匮乏的问题。为了应对“老龄化中国”,国家层面近年出台了相关政策,助推服务机器人在护理领域中的研发和应用。基于日本“产学官”协同创新理论,构建“产学官”协同创新模型,探讨日本富士软件生产的PALRO护理机器人的创新实践。研究结果显示:(1)在知识的创造方面:NEDO为智能模块的研发打造了一个开放式创新平台,通过“产学官”协同创新整合了分散在“产”“学”“官”各领域的相关创新资源。(2)在知识的共享和转移方面:NEDO首先选择具有基础性、通用性的智能模块作为共同研究对象;其次,确定和保障了各智能模块的功能及标准的制定;最后,致力于标准化智能模块的应用和推广。(3)在基于知识的创业方面:将PALRO机器人打造成科研、商用、家庭机器人三个系列以及新产品Palmi机器人的开发是富士软件在移动功能模块和交流功能模块技术的基础上所采取的主要创业形式。以此为基础,可以从“知识的创造”“知识的共享和转移”“基于知识的创业”三个维度,对中国护理机器人产业的发展提出政策建议。
关键词:日本“产学官”协同创新;“产学官”协同创新模型;创新平台;PALRO护理机器人
中图分类号:F204 文献标识码:A 文章编号:1004-2458-(2021)01-0021-11
DOI:10.14156/j.cnki.rbwtyj.2021.01.003
日本是目前全世界人口老龄化增速最快、问题最严重的国家。联合国将人口老龄化定义为65岁及以上老年人占总人口的比例超过7%。据日本总务省统计,自20世纪70年代始,日本步入老龄化社会;到1994年,该比例高达14%,短短24载便迈入了超老龄化社会;2010年该比例高达23%,总务省预测2060年将达到39.9%[1]。数量日益增长的老年人群体自然催生了护理需求。但由于日本政府偏低的护理报酬定价制度,护理工作的3K①性质,以及高校生源不足,致使近年来护理从业人员存在严重缺口[2]。为缓解这一问题,真正实现老有所依,日本以经济产业省、厚生劳动省等为代表的政府机构自2008年始相继出台了“机器人新机械创新项目”“福利用具护理机器人实用化支援事业”“机器人护理机器开发5年计划”等一系列援助项目,力图将日本长期积蓄的世界领先的机器人技术推广至护理领域。经济产业省2015年1月公布的《日本机器人新战略》中也提到,截至2020年,将实现护理机器人在护理领域的使用意向提高至80%,其国内市场规模扩大至500亿日元[3]。日本矢野经济研究所统计显示,2015年护理机器人日本国内市场规模为11亿日元,预计2020年将达到150亿日元[4]。
实际上,中国人口也在迅速老龄化。据亚洲开发银行2014年的调查,预计60岁以上人口所占比例将由2010年的12%上升至2050年的33%,届时中国将成为全世界老龄化最严重的国家,且中国长期存在护理人员匮乏,基本培训缺失的问题[5]。為挽救“老龄化中国”,部分解决养老护理人手的紧缺,机器人产业作为中国一项战略性新兴产业,国家层面近年来也出台了一系列政策,推广服务机器人在护理领域中的研发和应用。其中2015年国务院公布的《中国制造2025》中提到,要围绕医疗健康、家庭服务等服务机器人应用需求,积极研发新产品。2016年4月工信部、国家发改委、财政部三部委联合印发的《机器人产业发展规划(2016—2020年)》中明确指出,促进服务机器人向助老助残、医疗康复等领域发展,将智能护理机器人作为标志性产品实施率先突破。2018年11月,工业和信息化部印发的《新一代人工智能产业创新重点任务揭榜工作方案》中指明,计划到2020年护理机器人产业要突破关键技术,实现一定数量的样机生产,完成技术与功能验证及应用示范。文章以日本富士软件生产的PALRO护理机器人为案例,基于日本“产学官”协同创新理论,构建“产学官”协同创新模型,深入探讨PALRO机器人的创新实践,以期为中国护理机器人产业的发展提供智力支持。
一、理论框架与模型
(一)日本“产学官”协同创新的特征和机制
自1995年开始,日本逐渐步入“知识社会”,知识成为了提高经济竞争力的重要源泉。而“产学官”协同创新不仅使得通过创造和活用知识,提高产业界的“知识价值”成为可能,还能有效避免重复研究、标准混乱、过度竞争而造成的资源浪费,进而提高全社会的资源配置效率[6]。因此,面对21世纪日益加剧的国际贸易摩擦、产业空洞化等问题,为了保证国家和产业的持续竞争力,日本形成了独具特色的“产学官”协同创新体系。
在日本,“产学官”中的“产”是指具有创新能力需求和捕捉市场动态的民营企业等将研发成果和经济活动直接对接起来的一方;“学”是指大学、专科院校等从事新知识的创造和人才培育的一方;“官”则是指制定和执行科技政策和制度的有关政府机构,或拥有高水平科研能力的政府科研机构[7]。基于此,日本“产学官”协同创新是指企业、政府、知识生产机构(大学和政府科研机构)等为实现重大科技创新而开展的大跨度整合的创新组织模式,通过实现各方之间的优势互补,加速技术的基础研究、应用研究以及技术的推广应用和产业化,协作开展产业技术创新和科技成果产业化的活动[8-9]。
1. 日本“产学官”协同创新的特征
(1)“官”是“产学官”协同创新的重要推动者。
从广义来看,政府或官方科研机构作为“协调者”为“产”和“学”搭建桥梁[10],主要发挥以下3个方面的作用:第一,领导作用。经济产业省、文部科学省等政府机构针对基础性、共通性的技术创新推出重大项目课题,打造创新平台,引领企业、院校和科研机构参与分工协作[11]。第二,政策保障。自1996年起,政府通过颁布各项法律、法规(如《科学技术基本法》等)为“产学官”协同创新提供资金支持以及知识产权保护等制度保障。第三,协调作用。政府或官方科研机构通过联络会、委员会等形式加强创新平台内的知识、技术、信息的交流,有效衔接“产”和“官”的供需,促进科技成果的转移和共享[12]。
(2)“产”特别是大企业真正发挥了“创新主体”的作用。
在日本“产学官”协同创新活动中,大企业是创新的主体。大企业不但拥有从研究、设计、开发一直到应用推广的创新体系,而且对知识、技术的吸收消化能力强,因此在“产学官”协同创新中成为“产”的主要对象[13]71。
(3)重视“学”与政府科研机构之间的合作,推进横向协力。
虽然日本的高校基础研究扎实深入,为高科研水平的创新活动提供了保证,但却存在着“产学官”协同创新意识薄弱、技术转移能力有限等诸多短板[14]。而政府的科研机构通过创新平台与高校合作,可以拓宽高校研究成果的实用性,助推科研成果的产业化,从而实现“产学官”协同创新的最终目的。再者,政府科研机构能够根据研发计划对创新成果进行公正评价,以及与高校共同开展人才的培育活动,从而与“学”实现横向协力,互不冲突[15]。
除此之外,日本“产学官”协同创新具有地域性的特征。在国家和地方连续、配套的政策支持下,为保证高新技术成果持续转化为生产力,通常在某一特定地域建立“产学官”协同创新战略据点[16],根据产业需求不断对创新产品进行检测和推广,从而突破以项目带动为主的短期合作状况,转为追求技术创新可持续发展的长远利益[13]73。
2. 日本“产学官”协同创新的机制
日本“产学官”协同创新实际上体现了新知识的创造和活用[17]。在此对日本“产学官”协同创新的机制进行考察。
(1)统一价值创造的理念。其本质是根据当前的基础研究成果,通过不同参与主体之间的沟通,实现由原来各自的经营战略向整体创造统一新知识愿景方面过渡[18]。新知识愿景的构建不但有助于明确各参与主体的研究方向,也是日本企业形成业务战略,推进创新成果产业化的原因[19]。同时,它鼓励通过建立创新社群,对创新产品进行检测以及在组织间开展知识转移等活动。
(2)“场”的构建。日本政府的各项政策支持充分表达了对新知识愿景和创造过程的承诺,因此,鉴于知识本身的脆弱性,通常由政府或官方科研机构为知识创造者构筑创新基地——“场”[20]。“场”的构建主要基于以下两个目的:第一,“场”是促进跨学科及跨业务合作的组织结构。第二,推进参与主体之间的交流与协作。有效的交流不仅是暗默知识共享的开端,也是加速知识在组织层面螺旋上升的基础。协助交流不仅有助于协调个体的行动和见识,反思自身,同时也增进各方之间的相互信赖,促进知识的优势互补[21]。
(3)参与主体分工明确并各自开展自主行动。日本“产学官”协同创新中,基础研究和人才培育主要由大学承担,应用研究由政府所属科研机构和企业共同承担,产品开发方面则由企业主要承担,分工的目的在于明确体系中各参与主体的责任[22]。在日本“产学官”协同创新活动中,不仅分工明确,而且还主张各参与主体研发活动的“自主性”,目的在于提高各主体的创新活力。
(4)采用垂直统合的体制降低产业化風险。日本“产学官”协同创新过程中,为实现不同参与主体之间知识的互补和新知识外溢的内部化,在各个平行的研发项目实施过程中,企业和大学、企业和企业之间的研发分工主要采用垂直统合的体制[23],技术开发方与使用方紧密合作。这样不仅能够减少研发成本,缩短研发时间,也使得研发单位或部门与企业的市场部门之间能够通过密切的交流,促使研发方向符合市场需求,降低产业化风险[24]。
(5)权益的明晰。日本《科学技术基本法》《知识产权基本法》等一系列法律,明确规定了对各参与主体知识产权的保护,以及研究成果的利益分配。这一规定,极大提高了各参与主体的创新积极性。
(二)“产学官”协同创新模型
实际上,近年来不少学者对“产学官”协同创新这一日本重要的创新模式进行探讨。其中,近藤正幸认为日本“产学官”协同创新模型中应包含知识的共同创造、知识的转移和基于知识的创业3种具体类型,并利用该模型对日本《第3期科学技术基本计划》中的生命科学、信息通信、环境科学和纳米材料4个重点产业的协同创新情况进行考察[25-26]。松尾纯广等结合电气通信大学承担国家项目的创新案例认为,“产学官”协同创新最大的风险来源于新知识创造和活用的不确定性,而“官”的资金、政策支持,以及“场”的构建往往在其中起到重要作用[9]。长冈贞男等通过对NEDO(The New Energy and Industrial Technology Development Organization, 新能源产业技术综合开发机构)在2001—2009年间推行的约250个创新项目进行考察,认为在日本“产学官”协同创新模式中,对通用性、基础性技术实现知识的共享,有助于避免出现各个参与主体之间因发生“囚徒困境”而导致研发投资不足的局面[23]。荒矶恒久结合北海道大学的“产学官”协同创新案例认为,为维持技术创新的可持续性,需要通过试生产和检验检测及时反馈知识活用中的问题,加速研究成果的产业化,甚至进一步实现新一轮的创新活动[27]。中森义辉通过对日本“产学官”协同创新过程中的知识构成系统进行解读,认为新知识的创造活动应该体现出暗默知识和形式知识之间的相互作用[28]。
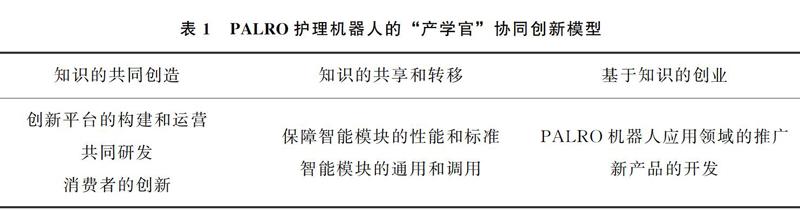
“产学官”协同创新也是日本服务机器人产业最重要的创新方式[29]。其中,护理机器人的研发创新具有风险大、智能化要求高、对市场检验及产业化依赖度大等显著特点[30]。本文根据对日本“产学官”协同创新的特征和机制的考察,在上述研究基础上结合本研究PALRO机器人的创新实践活动案例,构建了PALRO护理机器人的“产学官”协同创新模型(见表1),进而探究日本护理机器人产业的协同创新实践模式。其中,需要说明的是,具体到护理领域,由于老年人身体健康状况不同而存在需求的异质性,所以在创新实践活动中,消费者创新对个性化PALRO护理机器人的打造显得尤为重要。另一方面,拥有个性化的产品也填平了一部分横亘在“老年人”与“机器”之间的感情鸿沟。因此,本文将“消费者”作为第四个创新主体纳入到“产学官”协同创新模型中。
二、 PALRO机器人的“产学官”协同创新实践
(一) 知识的共同创造
由于护理机器人的服务对象是人,为了使机器人能够及时感知环境并作出反应,自然对护理机器人的智能化水平提出了很高的要求,智能化技术也被认为是护理机器人的关键技术。所以,智能模块的研发在PALRO护理机器人创新活动中占有关键地位。
PALRO护理机器人的智能模块由移动功能模块和交流功能模块两部分构成。这些功能模块都是在“产学官”协同创新模式下,由富士软件与筑波大学、东京大学、日本国际电气通信基础技术研究所、NEDO、产综研等机构共同研发的[31]。而消费者则是根据个体需求的差异,通过增加、修改、替换智能模块参与PALRO机器人售后的研发改进。本文以移动功能模块和交流功能模块的研发为例,探究PALRO机器人的知识的共同创造活动。
1. 创新平台的构建和运营
NEDO作为官方科研机构在2007—2011年通过施行“下一代机器人智能化技术开发项目”为PALRO机器人智能模块的研发打造了一个开放式创新平台。该平台整合了分散在“产”“学”“官”各领域的相关创新资源,在“产学官”协同模式下,由富士软件和筑波大学等多家机构共同研发出移动功能模块和交流功能模块。NEDO不仅在经济产业省的支持下保证研发资金,对平台进行事前、事中、事后管理,而且最主要的功能是通过平台促进了知识的共享和创造,进一步强化了中介桥梁和战略灵活决策的职能。
促进知识的共享和创造。为实现“将先进的机器人技术充分活用到护理领域”这一价值理念,NEDO基于“计划—施行—反馈(PLAN-DO-SEE)”的原则,分别在创新平台上自上而下设立项目推进委员会、项目计划调整工作组和项目执行小组,进而促进知识的共享和创造。其中,项目推进委员会的会员来自日本经济产业省、NEDO、东京大学、筑波大学、富士软件等机构,推进委员会每年举行3次会议,会议主要探讨智能模块研发过程中遇到的实际问题,并以目前的技术动向为基础提出可操作性的解决方案[32]。项目计划调整工作组的主要成员是由东京大学、筑波大学、富士软件、日本国际电气通信基础技术研究所组成,工作组每月召开一次会议,会议主要议题是对智能模块研发情况进行讨论和技术指导。工作组会议议程主要有以下3个环节:研发情况的口头报告、研发进度确认、现场实地考察。NEDO组建了由筑波大学、富士软件、芝浦工业大学组成的项目执行小组,小组主要任务是在项目计划调整工作组提供的技术指导下,解决智能模块研发中遇到的实际问题[32]。
NEDO打造的开放式创新平台成为智能模块研发参与者之间通过各种形式进行沟通和交流的场所,形式知识在这里联结、共享之后在研发现场转化为暗默知识,进而推进了研发PALRO机器人智能模块的知识创造。
2. 共同研发
共同研发过程中,在垂直统合的分工体制下,参与者根据各自所承担的研发任务自主开展分工协作,极大提高了各参与者自我激励去创造新知识的可能性,在NEDO所构建的“场”的支持下,充分利用以往的研究成果和相关技术指导,研发出PALRO机器人的智能模块。
(1)移动功能模块的共同研发。在NEDO的2007—2011年“下一代机器人智能化技术开发项目”的支持下,富士软件与筑波大学共同研发了PALRO机器人的移动功能模块。
移动功能模块研发过程中的具体分工合作如下:由于此前筑波大学智能机器人研究室在移动机器人系统研发领域已有20多年的知识积累,因此筑波大学研究室此次主要负责在借鉴NEDO以往研究成果的基础上,设计和提供移动功能模块的基本算法。富士软件作为一家独立的软件公司,在开发嵌入式控制软件,软件的销售与维护方面有丰富的经验。因此,富士软件主要负责基于筑波大学提供的基本算法,根据目前机器人制造商和系统集成商的现实需求开发和销售该软件模块,并提供售后服务[33]。
移動功能模块研发完成后,由筑波大学和富士软件共同完成室内测试和室外测试。室内测试是指,筑波大学和富士软件将移动功能模块分别安装在向导机器人ATERO和Technocraft公司制造的小型移动机器人BeeGo上,并在筑波大学智能机器人研究室、富士软件秋叶原大楼、筑波市政府等地完成移动功能测试[34]。室外测试是指,2008—2010年,在筑波市政府和日本新技术财团的支持下,筑波大学和富士软件将移动功能模块安装在移动机器人研究所制造的机器人Tufs上,连续3次参加每年一度的“挑战筑波”活动。其中,在2010年的活动期间,机器人Tufs实现了单次行走距离突破1km的成绩,完成了模块的测试[35]。
测试完成后,筑波大学将移动功能模块的研究成果公开在学校研究室网站上,富士软件将移动功能模块应用在PALRO机器人上[36]。
(2)交流功能模块的共同研发。受NEDO的2007—2011年“下一代机器人智能化技术开发项目”的委托,富士软件与日本国际电气通信基础技术研究所共同研发了PALRO机器人的交流功能模块。
交流功能模块研发过程中的具体分工合作如下:富士软件为提高PALRO机器人的沟通能力,负责提供和改进交流功能模块的各种算法[37]。其中,富士软件通过采用“Dear Talk Engine”算法不仅使PALRO更准确地理解单词和对话的前后文,而且可以较准确地预测对方下一句可能说话的内容,从而提高了PALRO机器人的沟通能力。日本国际电气通信基础技术研究所则主要负责结合富士软件提供的基本算法,与富士软件共同研发出交流功能模块,并开放源代码[38]。
2007—2009年,由富士软件“模块再利用研究中心”将交流功能模块分别安装在小型向导机器人Robovie-2、小型桌上机器人Robovie mini-R2和虚拟机器人Wakamura Simulator上进行测试。测试完成后,富士软件将交流功能模块应用在PALRO机器人上。
3. 消费者的创新
消费者是根据个体需求的差异,通过增加、修改、替换PALRO机器人的智能模块参与产品售后的研发改进。其中,消费者的参与方式分为直接参与和间接参与。
消费者的直接参与是指富士软件将移动功能模块和交流功能模块的开放源代码公布在公司的软件开发平台“PALRO Garden”上,购买PALRO机器人的科研机构、护理机构或家庭可以根据不同的需求和偏好直接增加、修改、替换部分智能模块,从而打造个性化的PALRO机器人[39]。据富士软件统计,截至2010年10月,仅由外部开发人员采用C++编程语言开发的软件达到30件以上,“PALRO Garden”也被形象地称为PALRO版的“APPLE STORE”[40]。
消费者的间接参与是指富士软件通过视频分享网站、社区交流网站等分享消费者的使用经验及改进建议,持续开展消费者听证调查活动,在与消费者实现经验、技能共享的基础上不断改进PALRO机器人智能模块的研发。由于直接修改智能模块对消费者计算机水平要求较高,因此大多情况下消费者采用间接参与的方式。截止到2015年10月,参与这种调查活动的老年人数量已经达到1 500人以上[41]。此外,2019年4月,富士软件与日本典型的老龄化区域——横滨市达成协议,将共同调查、分析和共享PALRO机器人的消费者体验和改进建议。
(二) 知识的共享和转移
为实现知识的共享和转移,2008—2011年,NEDO委托富士软件、产综研实施了“提高机器人智能软件再利用性的技术开发项目”。该项目的主要工作是保障智能模块的性能和标准以及实现智能模块在项目内外各机构之间的通用和调用。
1. 保障智能模块的性能和标准
自2008年开始,富士软件的“模块再利用研究中心”陆续组织NEDO“下一代机器人智能化技术开发项目”所研发的各个功能模块在项目内不同研发机构之间反复调用、测试,并结合反馈意见,推动研发机构进一步改良功能模块的性能。在这一过程中,研究中心不断按照既定标准对功能模块的性能、安全性等方面进行检测,最终打造了标准化的智能模块[42],并于2018年12月在NEDO和产综研的协调沟通下获得了国际软件标准化团体OMG(Object Management Group)的认定。
2. 智能模块的通用和调用
2011年7月,富士软件“模块再利用研究中心”将测试完成后的功能模块公布在研发中心的“再利用模块网络系统”上,真正实现了项目内研发机构之间的相互应用和对外公开。其中,移动功能模块和交流功能模块经过“模块再利用研究中心”测试后,近年来逐渐在几十个研究机构之间实现了通用,并直接调用在埼玉大学研发的教育用移动机器人、Eager公司的广告机器人和讲谈社的Atom对话机器人上[42]。
(三)基于知识的创业
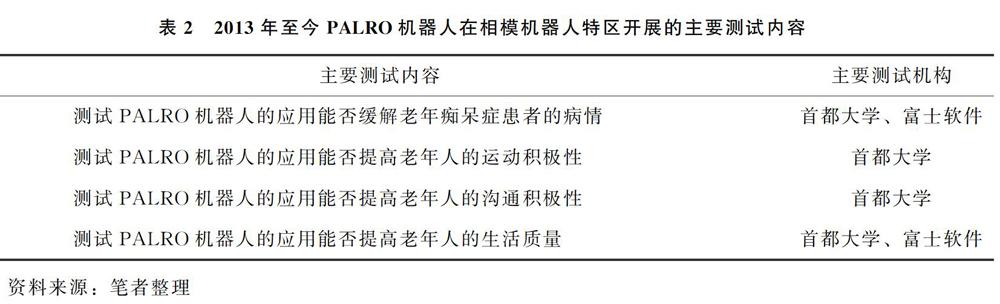
基于移动功能模块和交流功能模块成功研发,2013年2月25日,富士软件总部所在地神奈川县的9市2町组建了相模机器人特区(ROBOT TOWN SAGAMI),主要负责在长期对PALRO机器人现场应用情况进行测试的基础上,推广PALRO机器人产品和后续新产品的开发,并被国家指定为“区域振兴特区”。表2所示,就是PALRO机器人现场测试内容。这样不但突破了以项目带动为主的短期合作状况,转为追求PALRO机器人技术创新的可持续发展,也保证了“将先进的机器人技术充分活用到护理领域”这一价值创造理念的具体落实。
1. PALRO机器人应用领域的推广
(1)科研系列机器人。2010年3月15日,富士软件首批生产的科研系列PALRO机器人面向各科研机构以29.8万日元(不含税)的价格开始销售,并预计第一年销售量能达到1 000台。根据PALRO机器人官网资料显示,目前应用PALRO机器人的科研機构有关东学院大学智能机器人研究室、筑波大学智能机器人研究室、千叶大学大学院融合科学研究室和新泻大学大学院保健学研究室等。
(2)商用系列机器人。2012年6月,富士软件的商用系列PALRO机器人以67万日元(不含税)的价格开始对外销售,主要销售对象为各个养老机构。此外,由于富士软件在金融系统设计方面拥有30多年经验,自2015年下半年开始,结合企业积累的大量金融数据和金融人才,将PALRO机器人的销售范围逐渐扩展到地方银行、证券公司、百货商店等金融业和零售业领域。如表3所示,截止到2018年12月,商用系列机器人累计销量已经达到1 225台,这也意味着实际应用机构数量已经推广到1 000多家。
(3)家庭系列机器人。2017年9月27日—29日,富士软件在日本东京举办的“国际福祉机器展H.C.R 2017”上展示了研发完成的家庭系列PALRO机器人的样机“PALRO Gift Package”,开始将PALRO机器人的销售对象由机构扩大到个人。从功能上来看,这款机器人增加了“会员交流网站”的功能。该功能使身在远方的子女通过智能手机将文字或语音信息发送到“会员交流网站”,网站接收信息后及时将信息读给老人听,同样老人也可以通过智能手机利用该功能,从而便利了家人之间的沟通。2018年8月29日,富士软件通过PALRO官方网站以每台约25万日元的价格正式对家庭出售。
2. 新产品的开发
Palmi是由富士软件于2015年年初开发的、专门面向老年人个体消费的小型护理机器人。Palmi通常被称为PALRO的“兄弟”产品。从功能上来看,Palmi是在PALRO的基础上取消了老年人不常用的一部分功能模块。2015年5月1日,电子商务公司DMM.com在富士软件独家授权下,开始在其电商网站的“DMM. make ROBOTS”项目下以29.8万日元(不含税)的价格对外销售[43]。
三、结论与政策建议
文章基于日本“产学官”协同创新的特征和机制,结合富士软件PALRO机器人的创新实践活动案例,构建“产学官”协同创新模型,探究了日本护理机器人产业的协同创新实践模式。
(1)在知识的创造方面: NEDO为智能模块的研发打造了一个开放式创新平台,通过“产学官”协同创新整合了分散在“产”“学”“官”的相关创新资源,促进了PALRO机器人移动功能模块和交流功能模块的研发。
(2)在知识的共享和转移方面:NEDO将选择具有基础性、通用性的移动功能模块和交流功能模块作为共同研究对象,通过富士软件的“模块再利用研究中心”检测智能模块的性能及标准的制定后,再致力于将标准化智能模块的应用和推广。
(3)在基于知识的创业方面:富士软件在移动功能模块和交流功能模块技术的基础上,将PALRO机器人打造成科研、商用、家庭机器人3个系列并开发新产品Palmi机器人。
结合上述研究,对中国护理机器人产业提出以下政策建议:
(1)在知识的创造方面:
第一,重构国家级护理机器人产业创新平台,推动跨界知识“重新结合”。
当前中国服务机器人产业除了精密减速器、伺服电机、传感器等核心零部件之外,在人机交互、智能决策等方面也与国外存在很大差距,服务机器人产品仍然“看不清”“听不见”“说不好”[44]。因此,为实现护理机器人核心技术突破,中国应该借鉴日本NEDO的经验,由政府或政府科研机构牵头,以当前工信部认定的国家机器人创新中心投入营运为契机,将分散在中国科学院自动化研究所、北京理工大学机器人研究中心、北京科技大学机器人研发中心、上海交通大学自主机器人研究所、复旦大学媒体计算研究所等高水平的研发机构中“学”的优势资源,以及分散在沈阳新松机器人、哈工大机器人、科大讯飞、商湯智能等企业中“产”的优势资源整合在一起,打造国家级护理机器人产业创新平台,实现跨界知识“重新结合”,促进知识的创造和共享,推动中国护理机器人产业纵向健康发展。
第二,采用垂直统合的研发分工体制,引导企业成为创新主体,切实对接市场需求。
目前中国服务机器人产业创新主要依赖于高校、科研院所的研究成果,企业参与较少,导致大量科研技术与市场错配,并没有转化为生产力[45]。鉴于此,中国应该借鉴PALRO机器人智能模块的研发经验,基于护理机器人产业创新平台,根据大学以往的基础研究,应由企业和大学共同承担护理机器人核心技术的研发,并逐渐引导企业作为创新主体承担主要的研发任务。在具体研发项目实施过程中,企业和大学、企业和企业之间的研发分工应主要采用垂直统合的体制,实现研发单位与企业市场部门的密切沟通,这样既保证了技术研发有效对接市场需求,实现“所研即所用”,同时提高了企业的创新能力,有利于中国护理机器人领域龙头企业的培育。
(2)在知识的共享和转移方面:
第一,对基础性、通用性技术进行超前研发布局,设立国家级护理机器人共享知识平台。
目前中国的服务机器人公共技术平台有待完善[46],服务机器人产业技术转移的方式较为单一,主要通过科研院所或高校向企业单方面转移,这样不仅容易形成技术垄断,而且不利于“产”“学”“官”各方资源的整合。以最具代表性的沈阳新松机器人为例,该企业主要依托中科院背景,在技术上拥有先天的核心优势[47]。鉴于此,中国应该借鉴日本NEDO的经验,对基础性、通用性技术进行超前研发布局,在国家发改委牵头成立的国家机器人检测与评定中心的基础上,通过设立国家级护理机器人共享知识平台实现基础技术的公开和利用,这样既实现了技术的扩散,也提高了各企业参与“产学官”协同创新的积极性。
第二,以企业为参与主体,优先完善和保障护理机器人的国家技术标准及检测规范。
PALRO护理机器人的智能模块实现共享的前提是事先制定和保障完善的技术标准及检测规范。尽管中国成立了由中国机械工业联合会牵头的机器人标准总体组承担单位——中国机器人产业联盟,但目前中国大部分服务机器人产品仍然缺乏相应的检测标准和技术标准,服务机器人的接口、服务单元很不成熟。因此,中国应该在研发前优先完善护理机器人的国家技术标准,甚至制定与国际接轨的产品相关标准,再借鉴富士软件“模块再利用研究中心”的经验,将企业作为标准化工作的参与主体,在国家标准化管理委员会、工业和信息化部等部门的支持下,重视护理机器人产业核心技术的标准检测和认证工作,保障技术性能,真正将护理机器人的核心技术通过知识的共享变成一个产业,而不再是“小作坊”式的成立几个实验室生产几个小产品。
(3)在基于知识的创业方面,
应当由拥有核心技术的企业承担护理机器人的产业化,政府应整合“产”“学”“官”的资源助力核心技术的可持续研发和改进。
尽管当前中国服务机器人的产业化主要由企业承担,但不少地方存在政府、企业片面强调生产加工,轻视核心技术可持续研发的问题[45]。具体表现在中国服务机器人生产企业在技术基础薄弱的情况下过于追求快速获利,大部分企业仍以组装和代加工为主,产品同质化严重,功能低端。再加上不少地方政府为了短期政绩,盲目招商引资,导致服务机器人企业低水平重复性建设严重,甚至出现企业建厂骗补贴的现象[48]。鉴于此,中国应借鉴日本PALRO护理机器人产业化的经验,首先,护理机器人的产业化应该主要由拥有核心技术的企业承担。其次,在产业化进程中,企业应该眼光放远,根据市场的需求,重视核心技术可持续研发和改进。同时地方政府也要改变以往“给钱”“给地”这种粗放式补贴方式,扶持政策应从关注机器人的终端应用转移到整合“产”“学”“官”资源,助力企业核心零部件、共性技术的可持续研发上,助推护理机器人的产业化进程。
[参考文献]
[1]総務省.平成24年版情報通信白書のポイント[EB/OL].(2012-06-30)[2019-05-01]. http://www.soumu.go.jp/johotsusintokei/whitepaper/ja/h24/html/nc112120.html.
[2]平立群.日本政府支持科技创新应用于养老领域——以缓解价格扭曲为视角[J].东北亚学刊, 2016(3):22-27.
[3]経済産業省.ロボット新戦略のポイント[EB/OL].(2015-01-23)[2019-05-02]. http://www.meti.go.jp/press/2014/01/20150123004/20150123004d.pdf.
[4]矢野経済研究所.介護ロボット市場に関する調査を実施(2016年)[EB/OL].(2015-06-30)[2019-05-02]. https://www.yano.co.jp/press/press.php/001546.
[5]亚洲开发银行.中国人口老龄化化所带来的机遇和挑战[EB/OL]. (2014-03-30)[2019-05-02]. https://www.adb.org/sites/default/files/publication/42697/challenges-opportunities-population-aging-prc-zh.pdf.
[6]李麗花.日本における産学連携の展開——先行研究のレビューにおける時代ごとの主な特徴を中心に[J].広島大学大学院教育学研究科記要, 2012(61): 233-242.
[7]内島典子.産学連携の現状に対する課題認識[J].産学連携学,2012(1):27-34.
[8]西村順二.地域社会における社会的存在としての大学の役割,特徴,そして課題:地域連携,社会連携,そして産学連携のあり方[J].甲南経営研究,2016(3):27-52.
[9]松尾純廣,出川通,安部博文.産學官連携とイノベーション[J].産学連携学, 2012(2):1-23.
[10]佐藤暢.産学官連携組織のポートフォリオ分析を背景とした. コーディネート人材のモデル化[EB/OL].(2015-12-27) [2019-05-07]. http://www.jctbf.org/BMA_J/Vol14_1.pdf.
[11]山本進一.大学マネージメントと産学官連携[J].産学連携学,2019(1):1-7.
[12]進藤秀夫.産学官連携に対する現状と課題:官の立場から[J].学術の動向,2013(9):82-84.
[13]中村道治.産業構造の変革に向けた新しい産学官連携のあり方[J].学術の動向,2013(9).
[14]溫肇東,樊學良.日本產學合作之理論研究及政策實踐歷程[J].管理與系統,2013(2):201-226.
[15]進藤秀夫.産学連携と産総研のイノベーション活動[J].産学連携学,2012(1):14-19.
[16]吉用武史,赤池慎吾,大崎優,など.地(知)の拠点化に向けた高知大学の地域連携の取り組み[J].産学連携学,2016(1):15-23.
[17]湯本長伯.産学連携·異種異質連携による知の生産経世済民[J].産学連携学,2014(1):45-50.
[18]三藤利雄.知識基盤型社会のイノベーション創造普及過程に関する考察[J].日本情報経営学会誌, 2009(1):13-25.
[19]藤川昇,松井正之.産学官連携による技術移転·事業化の実証的研究[J].日本経営工学会論文誌,2010(2): 54-64.
[20]原辰次.社会的課題解決に向けた「知の統合」推進の「場」の構築[J].学術の動向, 2017(12): 18-22.
[21]田中健一.農林水産·食品産業にイノベーションを創出する産学官連携研究の新たな仕組み“「知」の集積と活用の場”の構築について[J].化学と生物, 2016(8):598-604.
[22]佐藤暢.社会技術としての産学官連携コーディネーションのあり方[D].高知:高知工科大学, 2015.
[23]長岡貞男,江藤学,内藤祐介,など.NEDOプロジェクトから見たイノベーション過程[J].経済研究,2011(3):253-269.
[24]加藤知彦,柴山創太郎,馬場靖憲.コンソーシアム型研究開発プロジェクトの政策評価:NEDO追跡調査の事例分析[J].研究技術計画, 2015(4):232-248.
[25]近藤正幸.科学技術における日本の政策革新:科学技術政策からイノベーション政策へ[J].研究技術計画,2004(19):132-140.
[26]近藤正幸.大学の技術分野別の研究資源と産学連携の状況とそれらの関係[J].産学連携学, 2015(2):51-61.
[27]荒磯恒久.人の輪·機能の輪[J].産学連携学,2012(1):19-26.
[28]中森義輝.知識科学:知識創造プロセスのモデリング[C]//横断型基幹科学技術研究团体連合. 横幹連合コンファレンス予稿集. 東京:横断型基幹科学技術研究团体連合,2011:2B3-1.
[29]内山隆.ロボットの研究開発における次世代の皆様への期待[J].日本ロボット学会誌, 2015 (4):239-246.
[30]比留川博久.ロボット介護機器開発·導入促進プロジェクト[J].日本ロボット学会誌,2016 (4): 228-231.
[31]富士ソフト株式会社.コミュニケーションロボットPALRO(パルロ)のご紹介[EB/OL].(2015-04-15)[2019-05-07]. http://activeictjapan.com/pdf/20150415/jimin_it-toku_document_20150415.pdf.
[32]NEDO技術開発推進部.第1回「次世代ロボット知能化技術開発プロジェクト」(事後評価)分科会資料5-1文本1[EB/OL].(2012-06-22)[2019-05-07].http://www.nedo.go.jp/content/100497962.pdf.
[33]油田信一,大矢晃久,吉田光治,など.移動ロボット用基本知能のモジュール化——次世代ロボット知能化技術開発プロジェクトにおける取り組み[C]//第26回ロボット学会学術講演会講演概要集.東京:日本ロボット学会,2008:55-69.
[34]NEDO技術開発推進部.第1回「次世代ロボット知能化技術開発プロジェクト」(事後評価)分科会資料5-1文本7[EB/OL]. (2012-06-22)[2019-05-15]. http://www.nedo.go.jp/content/100497956.pdf.
[35]岡村公望,石田卓也,大矢晃久.移動ロボット用基本知能のモジュール化[J].日本ロボット学会誌,2013(1):22-26.
[36]NEDO.次世代知能化技術開発プロジェクト「移動知能(サービス産業分野)の開発」移動知能基本モジュールの開発成果報告会資料[EB/OL].(2012-02-24)[2019-05-15]. https://docs.google.com/viewer?a=v&pid=sites&srcid=ZGVmYXVsdGRvbWFpbnxuZWRvaW50ZWxsaWdlbnRwcmp8Z3g6Njk0MzMxZWE4NDZmZWNjOA.
[37]張佳蕙,顧馨文.智慧照護廠商發展分析—以WellDoc、Fujisoft為例[EB/OL].(2015-12-30)[2019-05-15]. https://mic.iii.org.tw/aisp/ReportS.aspx?id=CDOC20151228014.
[38]NEDO技術開発推進部.第1回「次世代ロボット知能化技術開発プロジェクト」(事後評価)分科会資料5-1文本10[EB/OL].(2012-06-22)[2019-05-20]. http://www.nedo.go.jp/content/100497953.pdf.
[39]富士ソフト株式会社.ロボット事業推進部.ヒューマノイドロボット「PALRO」と知能化技術専用のソフトウェア·プラットフォーム「Sapie」[J].工業教育資料,2011(336): 7-11.
[40]石田己津人.人間型ロボットPALROがソフト基盤オープン化で目指すもの[EB/OL].(2010-10-27)[2019-05-20]. http://monoist.atmarkit.co.jp/mn/articles/1010/27/news111_2.html.
[41]東史恵.介護ロボットの開発·導入におけるユーザーとメーカーとの知識·スキルの共有化に関する一考察[J].専修マネジメント·ジャーナル,2016(1):27-39.
[42]二宮恒樹.ロボット知能ソフトウェア再利用性向上技術の開発[J].日本ロボット学会誌, 2013(1):7-9.
[43]富士ソフト株式会社.平成27年12月期決算短信[EB/OL].(2015-07-28)[2019-05-20]. https://www.fsi.co.jp/ir/library/docs/result/27_12_tanshin.pdf.
[44]张思锋,张泽滈.中国养老服务机器人的市场需求与产业发展[J].西安交通大学学报(社会科学版), 2017(5):49-58.
[45]赛迪智库机器人产业形势分析课题组.2019年中国机器人产业发展形势展望[J].机器人产业, 2019(1):12-19.
[46]赛迪智库.智能硬件产业发展白皮书[N].中国计算机报,2018-12-24(8).
[47]曹洪靓.沈阳新松机器人自动化股份有限公司发展战略研究[D].武汉:武汉工程大学,2015.
[48]王万.机器人产业发展研究[J].制造业自动化,2018(4):115-119.
[责任编辑 孙 丽]
A Study on the Practical Model of “Industry-Government-University” Cooperative Innovation of Japans Nursing Robots
——Taking the Nursing Robot PALRO as an Example
WULI Ji-tu, ZHOU Wei
(Economics School, Shanghai University, Shanghai, 200444, China)
Abstract: Our society is facing the problems of population aging and nursing staff shortage at present. In order to save the “Aging China”, many policies have been promulgated in recent years to promote the research, development, and application of service robots in the field of nursing. Based on the theory of Japans “Industry-government-university” Collaborative Innovation, the research investigates the innovative practices of FUJISOFT Corporations nursing robot PALRO by constructing the model of “industry-government-university” cooperative innovation. The results show: (1) In the aspect of knowledge creation, NEDO creates PALROs intelligent modules by constructing an Open Innovation Platform. This platform integrates the related innovation resources in industries, governments, and universities. (2) In the aspect of knowledge sharing and transferring, NEDO first chooses the basic and universal intelligent modules as the joint research object. Secondly, the functions and standards of each intelligent module are determined and guaranteed. Finally, it aims at the application and promotion of standardized intelligent modules. (3) In the aspect of knowledge-based entrepreneurship, developing PALRO robot into three series of scientific research, commercial and domestic robot and developing new Palmi robot are the main forms of entrepreneurship adopted by FUJISOFT Corporation on the basis of mobile function module and communication function module technology. On this basis, this research proposes policies and suggestions for the development of Chinas nursing robot industry from the three dimensions of “knowledge creation”, “knowledge sharing and transferring”, and “knowledge-based entrepreneurship”.
Key words: Japans “industry-government-university” cooperative innovation; the model of “industry-government-university” cooperative innovation; innovation platform; the nursing robot “PALRO”
收稿日期:2019-12-01
基金項目:国家自然科学基金青年项目(71703097)
作者简介:
乌力吉图,男,经济学博士,上海大学经济学院副教授,主要从事产业组织、战略管理和创新管理研究。
① 3K是形容工作环境的日语常用词,表示“肮脏”(汚い,Kitanai)、危险(危険,Kiken)、“辛苦”(きつい,Kitsui)之意。
