基于Harris-改进LBP的特征匹配及目标定位算法
2021-05-26张照崎朱留存苗志滨王骥月李修明赵成龙张坤伦
张 震, 张照崎, 朱留存, 苗志滨, 王骥月, 李修明, 赵成龙, 张坤伦
(1. 北部湾大学 先端科学技术研究院, 广西 钦州 535001; 2. 大连理工大学-立命馆大学国际信息与软件学院, 辽宁 大连116085;3. 广西机械工业研究院有限责任公司, 广西 南宁 530007)
0 引 言
图像局部特征点在不同观察场景下不变地反映图像信息, 广泛应用于目标定位[1-2]、 图像配准与图像拼接[3-5]、 目标识别[6]和SLAM(simultaneous localization and mapping)[7-8]等领域, 已成为计算机视觉领域的研究热点. 这类方法首先对图像中显著特征进行提取, 然后利用提取特征的描述子完成两张图像间特征的匹配, 再通过特征匹配关系建立图像间的几何变换模型[8-9], 特征点检测算法大多数基于灰度的一阶或二阶导数寻找极值点. Harris等[10]提出了经典的Harris特征点检测算法, 对图像旋转、 光线变化、 噪声和视点变换不敏感; Rosten[11]提出了FAST特征点检测算法, FAST算法速度较快, 但易受噪声影响. 上述特征点检测算法都基于单一尺度, 之后研究者们提出了能适应多尺度变化的特征检测算法, 如SIFT算法[12]和SURF算法[13], SURF是SIFT的改进算法. 这类算法需要用Laplace算子或高斯差分算子构建尺度空间, 增加了计算复杂度和匹配识别的难度, 实时性较差. 文献[10-11]仅关注于特征点检测, 并未给出描述子定义算法和匹配算法. SIFT算法[12]在特征点周围取16×16的邻域, 再将邻域化为4×4个小区域, 每个小区域统计8个方向梯度, 得到128维的向量作为描述子. SURF算法[13]在特征点周围取一个具有方向的正方形邻域, 再划分为16个子区域, 每个子区域统计4个Haar小波特征, 得到64维的向量作为描述子. 上述描述子信息丰富, 但运算代价较高, 占用内存大. Calonder等[14]提出的BRIEF描述子, 极大节省了内存空间; Rublee等[15]对BRIEF描述子进行改进提出了ORB算法, 根据角度参数提取BRIEF描述子, 使其具有旋转不变性. 近几年, 相继提出了一些改进融合算法[16-23], 如文献[16]实现了Harris算法与Hist算法的融合; 文献[20]和文献[22]分别对SURF和SIFT算法做了改进, 均取得了较好的实验效果.
本文应用背景源于机器人视觉伺服抓取, 对定位精度和实时性要求较高. 经典的SIFT和SURF算法虽适应范围广、 鲁棒性好, 但实时性较差; ORB算法运行速度快, 但定位精度较低. 因此本文首先选择Harris算法[10]提取特征点; 然后采用胡矩确定特征方向, 根据特征方向获取标准化局部图像, 提取标准化局部图像的LBP特征[24]作为特征描述子; 在特征匹配阶段, 通过计算两张图像中各特征点描述子间的汉明距离实现特征匹配; 最后根据匹配结果, 定位目标在场景图像中的位置, 算法流程如图1所示.

图1 算法流程
1 Harris图像特征点提取算法
Harris算法[10]思想: 先以待检测点为中心加窗, 获取窗内像素强度; 然后移动窗口, 重新获取窗内像素强度, 计算窗口移动前后强度差. 若沿任意方向移动窗口, 强度差值均很大, 则认为待检测点为特征点.
根据上述思想可定义计算公式为

(1)
其中W(x,y)为高斯窗口,u,v为以待检测点为中心的偏移量. 由Taylor公式,
可近似为

(2)
则有

(3)

R=detM-k(trM)2.
(4)
根据经验k=0.04~0.06, 特征检测结果如图2所示. 其中: (A)为原始图像; (B)为原始图像检出的特征点; (C),(D)分别为(A)旋转10°,-10°后检出的特征点. 实验中, 将最大特征响应强度的0.1倍作为阈值. 由图2可见, Harris特征点具有旋转不变性.
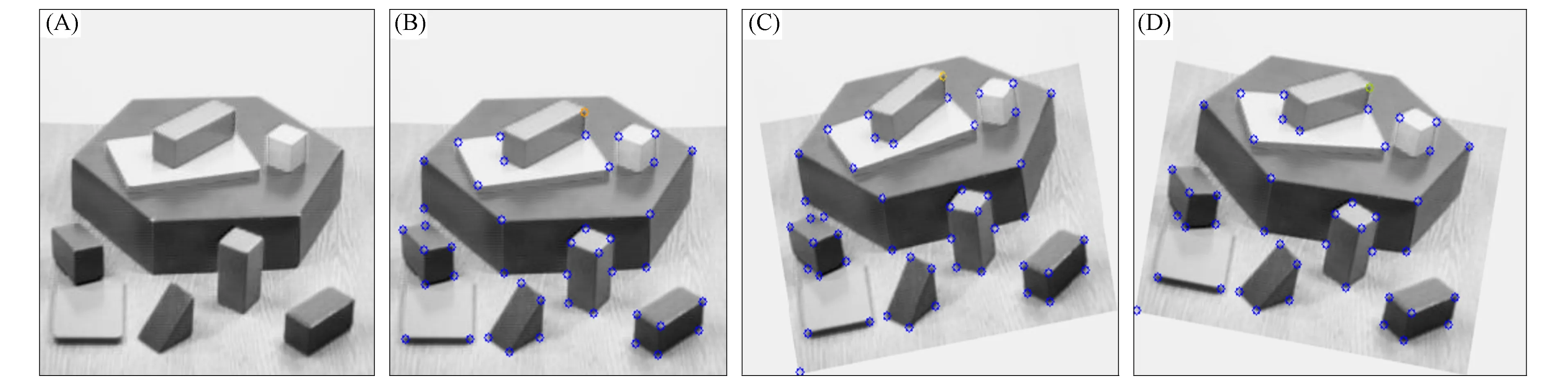
图2 Harris特征点检测结果
2 LBP的特征描述子定义
以特征点为中心截取局部图像, 计算局部图像的质心, 规定中心到质心的向量为特征点方向θ. 将局部图像旋转-θ, 得到标准化局部图像. 提取标准化局部图像的局部二值模式(LBP)特征作为特征描述子, 特征描述子生成过程如图3所示, 步骤如下.
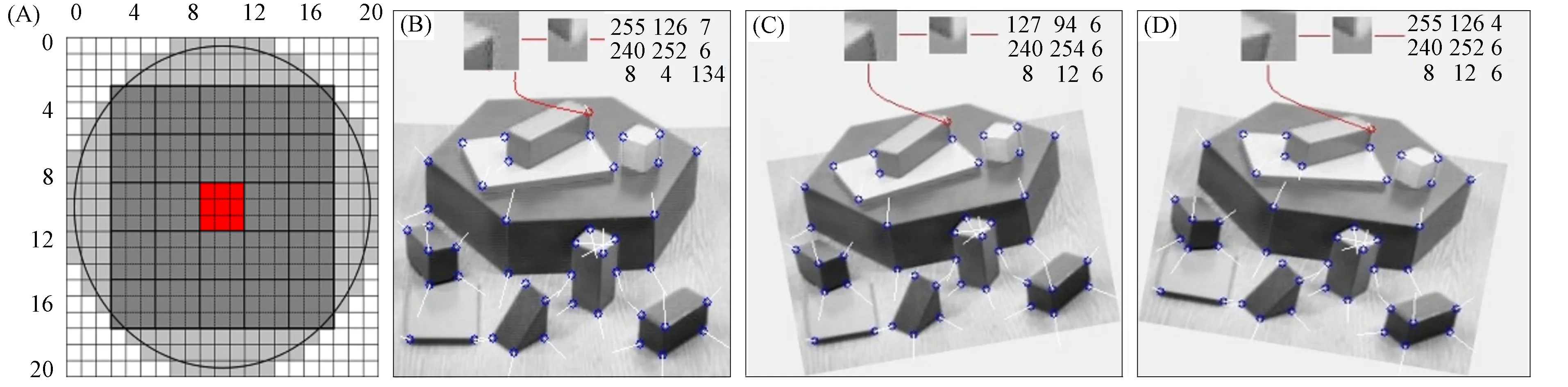
图3 特征描述子生成过程
1) 以特征点为中心截取局部图像, 本文取21×21窗口, 截取局部图像放大分别如图3(B),(C),(D)上方左侧小图所示.
2) 计算局部图像的质心(Cx,Cy):
为保持旋转不变性, 按圆形邻域取样, 计算公式定义为
(5)
其中wx和wy为灰度图像横纵坐标,vx和vy为特征点横纵坐标,rwindow为取样窗口半径, 图3(A)浅灰色圆形区域为按式(5)设计的取样窗口, 窗口大小为21×21, 取到圆形邻域内349个点, 取样窗口大小可根据实际需要做调整.
3) 确定特征点方向θ:
各特征点方向如图3(B),(C),(D)中白线所示.
4) 将局部图像旋转-θ, 截取圆形邻域内的15×15子图像作为标准化局部图像. 15×15采样窗口如图3(A)中深灰色区域所示, 步骤1)中截取的21×21局部图像, 通过旋转-θ, 截取得到15×15标准化局部图像分别如图3(B),(C),(D)上方中间小图所示.
5) 提取标准化局部图像LBP特征作为特征描述子.
传统LBP在一个3×3的图像块中对区域进行描述, 将中心像素的灰度作为阈值, 与其8个邻域像素的灰度值对比并二值化, 小于该阈值置1, 否则置0, 然后与加权矩阵对应的值相乘, 得到8位二进制串作为LBP特征, 原理如图4所示[24], 该描述子具有速度快、 不受光照变化影响的优点.

图4 传统LBP原理
实验表明, 直接采用传统LBP提取的特征描述在特征匹配过程中算法性能较差, 这是因为提取的特征点位置难免有误差, 且特征点坐标位置是浮点型, 在取整过程中也存在误差, 这种误差的累计对特征匹配影响较大. 因此, 本文对传统LBP算法进行改进, 方法如图3(A)中深灰色区域粗实线所示, 将15×15标准化局部图像分成5×5个子块, 将每个子块(3×3个像素)作为一个整体, 然后进行LBP特征提取, 该步骤采用积分图像法提高速度. 针对5×5个子块, 可提取到3×3个LBP特征作为特征点的描述子, 如图3(B),(C),(D)上方矩阵所示. 改进后的LBP算法可削弱特征点定位误差的影响, 使匹配过程中算法的稳定性得到改善.
3 特征匹配与目标定位算法
特征匹配的依据是特征点描述子间的相似度, 本文采用汉明距离作为度量标准, 即待匹配两个描述子间9个二进制串中不相同位的个数.
特征匹配步骤如下:
1) 选择标准图像中的任意描述子G[m];
2) 在场景图描述子中寻找G′[n], 使得d(G[m],G′[n])最小;
3) 若d(G[m],G′[n])<τ, 则认为标准图像特征点m与场景图像特征点n匹配(τ为阈值).
特征匹配结果如图5所示, 每条连线对应的两点为匹配的特征点.
目标定位过程如下:
1) 寻找两组匹配特征点间的变换关系, 即估计归一化单应性矩阵:
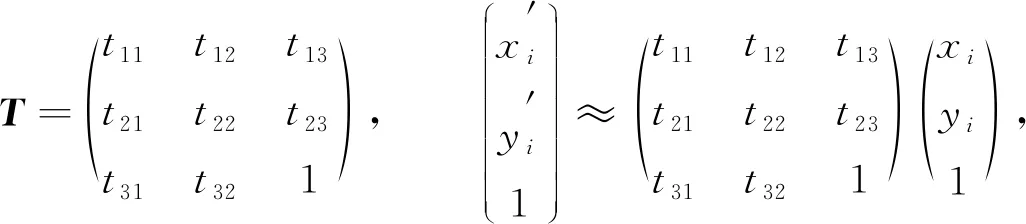
(6)

2) 根据标准图像4个顶点坐标, 利用式(6)计算对应场景图像4个顶点的坐标, 从而定位目标. 目标定位结果如图5所示, 红色框定位了标准图像在场景图像中位置, 利用式(6)可计算标准图像每个像素点在目标图像中的位置.

图5 旋转10°(A)和-10°(B)特征匹配及目标定位结果
4 实验结果对比分析
图6~图9分别为本文算法与SIFT[12],SURF[13],ORB[15]算法的匹配及定位效果对比. 图6~图9分别采用Lena图像、 Barche图像、 Goldhill图像和Barbara图像作为标准图像, 各自旋转10°后作为场景图像. 通过调整算法参数, 4种算法特征匹配数量基本相同. 观察发现, SIFT及本文算法定位精度差异较小, 但均好于SURF和ORB算法. 下面以图7中Barche图像为例进行实验数据对比, 衡量4种算法的运行速度和定位精度. 定位精度实验中, 考虑到机器人视觉伺服抓取过程, 相机位置固定, 工件图像只发生位置偏移和旋转变化, 不存在尺度变化和仿射变换, 因此主要对平移和旋转误差进行对比.
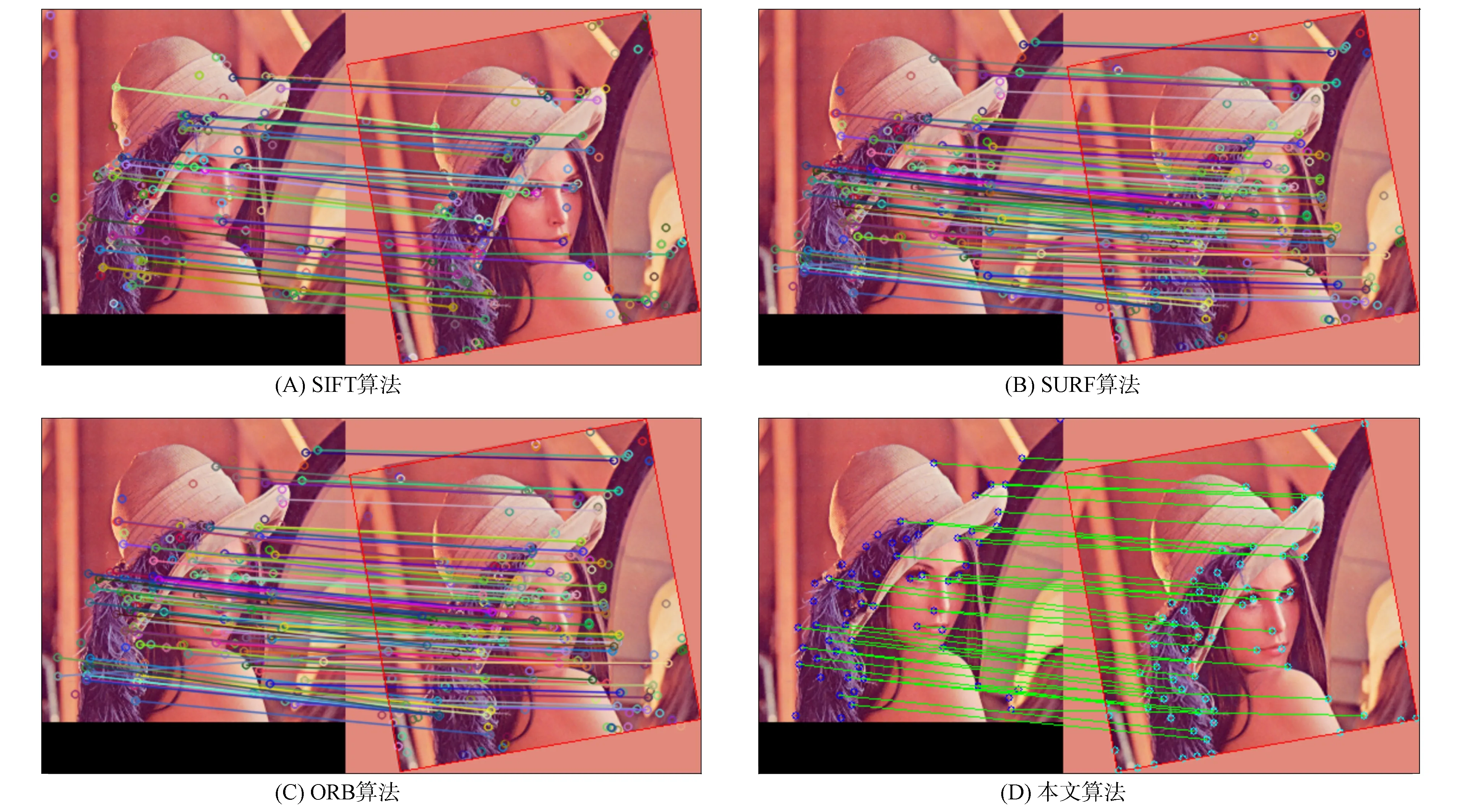
图6 不同算法的Lena图像匹配及定位效果对比
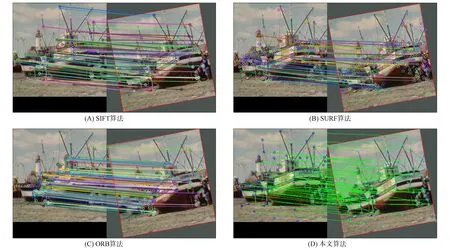
图7 不同算法的Barche图像匹配及定位效果对比
实验环境: 电脑主频3.6 GHz, 内存16 GB, 操作系统Win10 64位, 开发平台VSC++. 其中, SIFT,SURF,ORB算法实现调用了OPENCV库函数. 由于SIFT,SURF算法已申请专利, 不能在RELEASE模式下运行, 为具可比性, 4种算法均在DEBUG模式运行. 表1为Barche图像各角度下不同算法定位过程运行时间的对比.

表1 不同算法运行时间(ms)对比
由表1可见: ORB算法耗时最少; 本文算法次之, 约为ORB算法的3倍; SURF和SIFT算法实时性较差, 耗时约为ORB算法的9倍和15倍.
平移误差定义为: 定位中估计的4个边界顶点坐标与场景中对应4个实际边界顶点坐标之间距离的最大值. 表2为各角度下不同算法定位过程平移误差的对比. 由表2可见: SIFT算法精度最高, 误差均值为0.52, 误差最大值为0.77; 本文算法略差于SIFT算法, 误差均值为0.63, 误差最大值为1.15; SURF算法误差均值为1.18, 误差最大值为5.60; ORB算法精度最差, 误差均值为3.31, 误差最大值为7.22.

图8 不同算法的Goldhill图像匹配及定位效果对比

图9 不同算法的Barbara图像匹配及定位效果对比
旋转误差定义为: 定位中估计的4条边界线与场景对应4条实际边界线角度偏差绝对值的最大值. 表3为各角度下不同算法定位过程旋转误差的对比. 由表3可见: SIFT算法精度最高, 误差均值为0.02, 误差最大值为0.04; 本文算法精度次之, 误差均值为0.15, 误差最大值为0.25; SURF算法误差均值为0.44, 误差最大值为1.05; ORB算法精度最差, 误差均值为0.50, 误差最大值为1.84.
实验结果表明: 本文算法定位精度略差于SIFT算法, 明显优于SURF和ORB算法; 定位速度慢于ORB算法, 远好于SIFT和SURF算法, 能满足实时性要求. 基于本文应用背景, 本文算法综合表现最好, 已应用于5轴机器人伺服定位抓取系统, 经过近30 d实际验证表现出良好的稳定性.

表2 不同算法平移误差(像素)对比

表3 不同算法旋转误差(°)对比
综上所述, 本文算法通过改进传统LBP定义的特征描述子, 具有定位精度高、 运行速度快、 鲁棒性好、 不受光照变化影响的优点. 但在特征提取过程中保留了Harris算法对尺度变化敏感的不足, 在描述子生成过程中旋转子图像步骤耗时较多.
