基于弹药飞行器的舵机系统提高响应速度的方法
2021-05-24龚育林
龚育林
(新余学院 机电工程学院,江西 新余 338004)
舵机是弹药飞行器中的重要组成环节,是舵回路的执行机构,它接收飞行控制器的综合给定控制信号,经过计算后输出一定力矩和扭矩,以驱动弹药飞行器的舵面按要求偏转,同时控制弹翼产生弹药飞行所需的升力,实现弹药飞行器舵面角运动和航迹运动[1]。舵机系统对这些运动信号的响应速度,对弹药飞行器能否快速准确追踪目标至关重要。弹药飞行器的发展很快,一是信息科学技术的快速发展,二是现代军事变化提出了更高的要求[2]。为了更好地保证弹药飞行器快速按需要的弹道飞行,研究如何提高舵机系统的性能已成为了该领域科研人员的重要课题。近些年来,由于材料科学和大功率器件的快速发展以及制造工艺水平的不断提高,稀土永磁直流电动机和直流无刷电动机等已相继研制成功[3],快速地推动了电动航机的研发,使其性能大为改善,如电机力矩增大、电机时间常数显著下降等[4]。与液压舵机和气动舵机相比较,电动舵机具有较大优势,因而其在弹药飞行器领域中也得到了更为广泛的应用。
随着控制器及控制技术的不断进步和控制计算方法的不断创新,电动舵机系统的控制器设计有了更多平台。为了更好地改善电动舵机系统的动态性能,提高响应速度,针对舵机控制器,基于传统PID 控制算法,设计了一种改进复合式PID 计算方法。
1 电动舵机系统的结构
电动舵机系统采用闭环控制,主要由舵机控制器、伺服功率放大器、直流伺服电动机、减速机构以及航角位置传感器等组成[5-6],其方框图如图1 所示。

图1 电动舵机系统的方框图
舵机控制器主要包括主控CPU、A/D 转换电路及通信接口等,如图2 所示。主控CPU 是核心,对舵机控制信号及位置速度反馈信号进行处理,实现各种复杂的运算,处理后的信号再经通信接口发送到飞行控制系统[7]。伺服功率放大器为电动机提供所需要的功率,由脉冲宽度调制器和开关控制电路组成。直流伺服电动机是电动舵机系统的执行元件,采用直流无刷电动机并为舵机系统提供原动力。减速机构由减速齿轮组构成,通过对电机进行减速得到合理的速度来驱动舵面。舵角位置传感器是将感受到的舵片偏角的位置经A/D 转换成电信号(舵偏信号),并与跟踪位置信号相比较后传送到舵机控制器的主控CPU 进行处理,实现对弹药飞行器的控制。
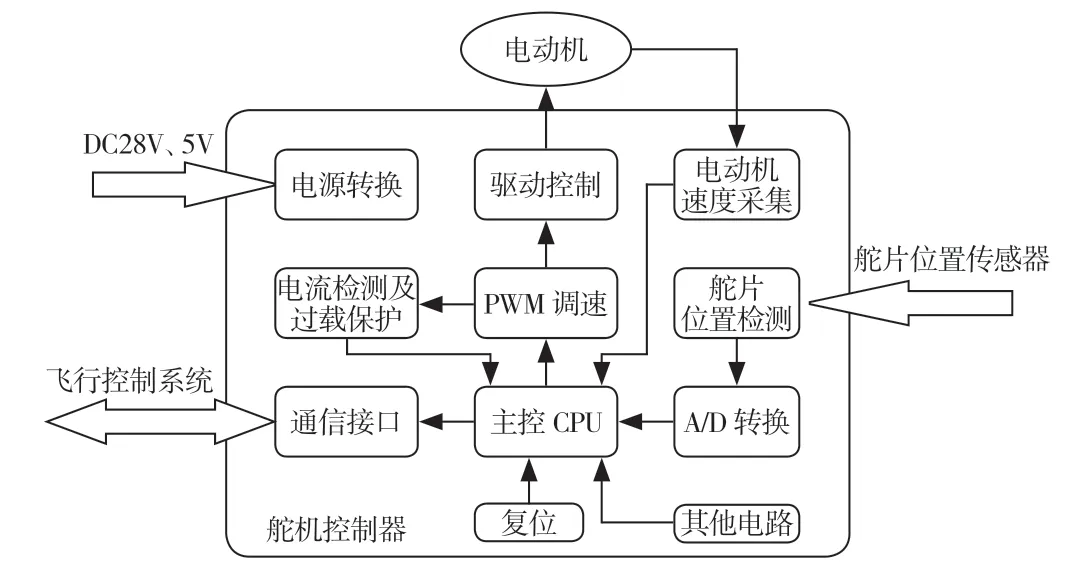
图2 舵机控制器设计方案
2 电动舵机系统的数学模型
2.1 直流伺服电动机
直流伺服电动机的等效原理电路[8]如图3 所示。

图3 直流伺服电动机的等效原理电路图
直流电动机各物理量之间的基本关系如下:

式中ud为电枢电压,id为电枢电流,Rd为电枢电阻,Ld为电枢漏电感,ea为电枢电动势,Td为电磁转矩,KT为转矩常数,Φ为磁通,Ke为电动势常数,n为转速,TL为摩擦和负载阻力矩,为转动惯量,GD2为飞轮矩,
分析电枢电压ud对电动机转速n的影响,以ud作为输入量,n作为输出量,TL作为扰动量。消去中间变量id、Td和ea,并整理成标准形式,得到电枢电压控制的直流电动机的微分方程式:

式中τm为电动机的机电时间常数:

τd为电枢回路的电磁时间常数:
可以看出,电动机的转速与电动机自身的固有参数τm、τd及电枢电压ud、负载转矩TL有关。若不考虑电动机负载的影响,则有:

对(6)式进行Laplace 变换后可得:

根据式(7)、(8),可以得到其结构图如图4 所示。

图4 直流伺服电动机结构图
2.2 功率驱动电路
伺服功率放大器将前级控制器信号进行功率放大,通过改变脉宽调制的输入来控制伺服直流电动机,以实现对飞行器角度及飞行轨迹的控制[9]。放大器由脉冲宽度调制器和开关控制电路组成,采用双极性式脉宽调制PWM 变换器,当控制电压变化时,PWM 变换器输出电压按线性规律变化,由于响应有延时,故可近似为一个滞后环节,其传递函数为:

式中KPWM为功率驱动器的放大倍数;τ为功率开关管的时间常数。
2.3 舵角位置传感器
舵角位置传感器采用反馈电位计,将舵面的偏角位置转变成电压量,实现位置反馈。设舵轴带动舵面偏转的角度为θm,则反馈电位计的输出电压uf为:

式中uf为电压计总行程时对应的电压;δ为电压计总行程。
令KF=Uf/δ,则(10)式可以转化为uf=KFθm。因此,舵角位置传感器的传递函数:

2.4 减速机构
减速机构是将伺服电动机输出的高转速、小力矩的运动,转化为低转速、大力矩的运动。这里采用两级减速,一级是伺服电动机经过齿轮变速输出力矩,构成电动舵机的本体,另一极是将电动舵机的输出力矩传递到舵面的连杆机构。减速比i等于输入转速ω与输出转速Ω 之比,也是电动机输出转角θa与舵机的输出转角θl之比。其传递函数为:

式中ω为减速器输入转速;Ω为减速器输出转速。
通过以上的分析,得到系统的结构图如图5。

图5 系统的结构图
3 控制器算法及改进
一般复合式模拟控制器PID 包含三个组成部分:比例控制、积分控制和微分控制,其数学表达式为:

式中u(t)为控制器输出;Kp为比例系数;e(t)为系统误差;Ti为积分时间系数;Td为微分时间系数。应用上式PID 控制,有研究表明,其控制结果并不理想。为了改善控制系统性能,提高系统快速响应及实现无超调量控制,控制器采用改进复合式数字PID 控制算法。比例控制实质是一种线性放大作用,是最基本的控制,其数学表达式:

式中up(k)、e(k)分别为第k拍的比例输入信号和误差信号。
微分控制反映误差的变化率,即在误差信号变化之前给出控制信号,防止系统出现过大的偏离和震荡,提高了系统的快速性,有效地改善了系统的动态性能,但会引起抗干扰能力的下降[10],为了解决这个问题,改用完全微分计算,即在设计PID 控制器时加入一个数字低通滤波器。原微分控制的数学表达式为:

式中T为采样周期。加入数字低通滤波器后的数学表达式为:

式中uD(k)为微分控制输出;Kd=Td/T为微分系数;λ为低通滤波系数。
积分控制的输出反映了输入信号的积分,可减少系统稳态误差,提高控制精度,但如果积分时间足够长,积分量会累积过大,以至超出执行元件的极限能力,即出现了积分饱和。当偏差反向,控制量需要一定的时间脱离饱和区[11],输出不能及时反应,会引起系统大幅度超调、震荡,为了消除这种现象,这里改用遇限削弱积分计算,即为积分量设置一个合适的上限值,当积分量累加到这一值时,执行削弱积分项的运算,而不再进行增大积分项的运算,其数学表达式为:

式中uI为积分输出;Ki=Ti/T为积分系数。
改进后的复合式数字PID 控制算法,其输出u(k)为:

4 系统仿真及效果
MATLAB 环境下,仿真时各个环节的参数:直流伺服电动机额定电压为120 V,额定电流为25 A,额定转速为1 000 r/min,Keφ=0.192 V·min/r,KTφ=1.833 6 N·m/A,JG=0.11 N·m2,τd=0.001 67,τ=0.001 2,KF=0.052。
给定输入正弦信号r(t)=sinωt(ω=93.6 r/s),电压幅值-1 V~+1 V 对应的舵偏角为-12 °~ +12 °,系统仿真结果如图6 所示。

图6 正弦跟踪响应
给定输入阶跃信号r(t)=1(t)(t≥0),电压幅值0~1 V 对应的舵偏角为0~12 °,系统仿真结果见图7。
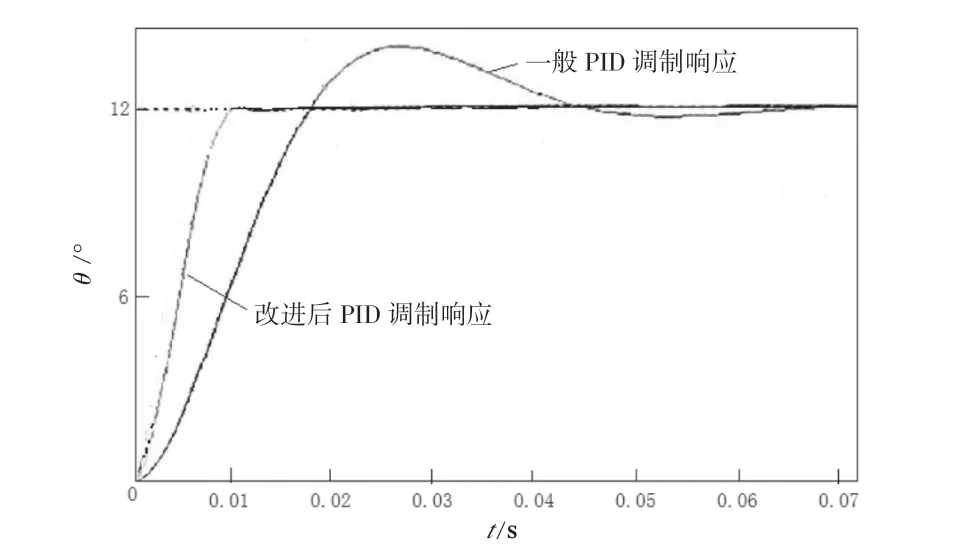
图7 系统阶跃响应
图6 测试结果为:跟踪位置舵偏信号与舵机输出信号的最大延迟时间为0.83 ms,相偏为7.8 °,说明电动舵机控制系统能够实现快速跟踪。图7 为改进复式算法前后电动舵机控制系统稳态跟随测试,表明改进算法后系统上升时间及达到稳定状态的时间均约为9.6 ms,比改进前系统的调节时间57.7 ms 快了48.1 ms,改进后系统响应无超调,无稳态误差,达到控制基准要求。
5 结语
基于弹药飞行器的电动舵机控制系统具有响应速度快,跟踪精度高,无超调量等特点。这种方法具有一定的通用性,为类似飞行器系统设计提供了一些技术性铺垫。
