一体化航天伺服机电组件用行星滚柱丝杠研究
2021-05-22彭之春孙耀程
彭之春,徐 克,孙耀程
(1.中国航天科工南京晨光集团,南京 210012;2.中国电子科技集团公司第二十一研究所,上海 200233)
0 引 言
航天伺服机构为满足军事设备的小型化、高可靠性、高强度、高刚度要求,采用机电一体化设计方案,如滚柱丝杠与电机一体化、谐波减速器与电机一体化、行星齿轮传动与电机一体化,可以将行星滚柱丝杠与电机结合应用到精密伺服传动机构中[1-3]。根据需求,设计了电机与行星滚柱丝杠一体化的机电组件,如图1所示。
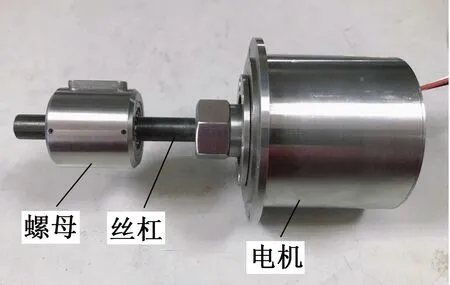
图1 机电组件
现阶段,行星滚柱丝杠的性能指标参照滚柱丝杠的参数指标,主要有传动精度、动载荷、静载荷等,而这些参数指标不能满足对于航天一体化机电组件的行星滚柱丝杠的高可靠性要求。本文设计了一RV10×2行星滚柱丝杠副,并研究该行星滚柱丝杠副的综合性能评价方法,对综合性能进行试验,探究航天用滚柱丝杠的性能评价方法的有效性。
1 RV10×2行星滚柱丝杠副设计
RV10×2行星滚柱丝杠副指标:丝杠行程35 mm,额定推力3 000 N,传动精度0.02 mm,导程2 mm。
1.1 运动关系分析
行星滚柱丝杠副的工作原理与行星齿轮机构类似。典型行星齿轮机构,如图2所示,由作为主动件的太阳轮、作为从动件的行星架、行星轮以及固定的齿圈等组成。
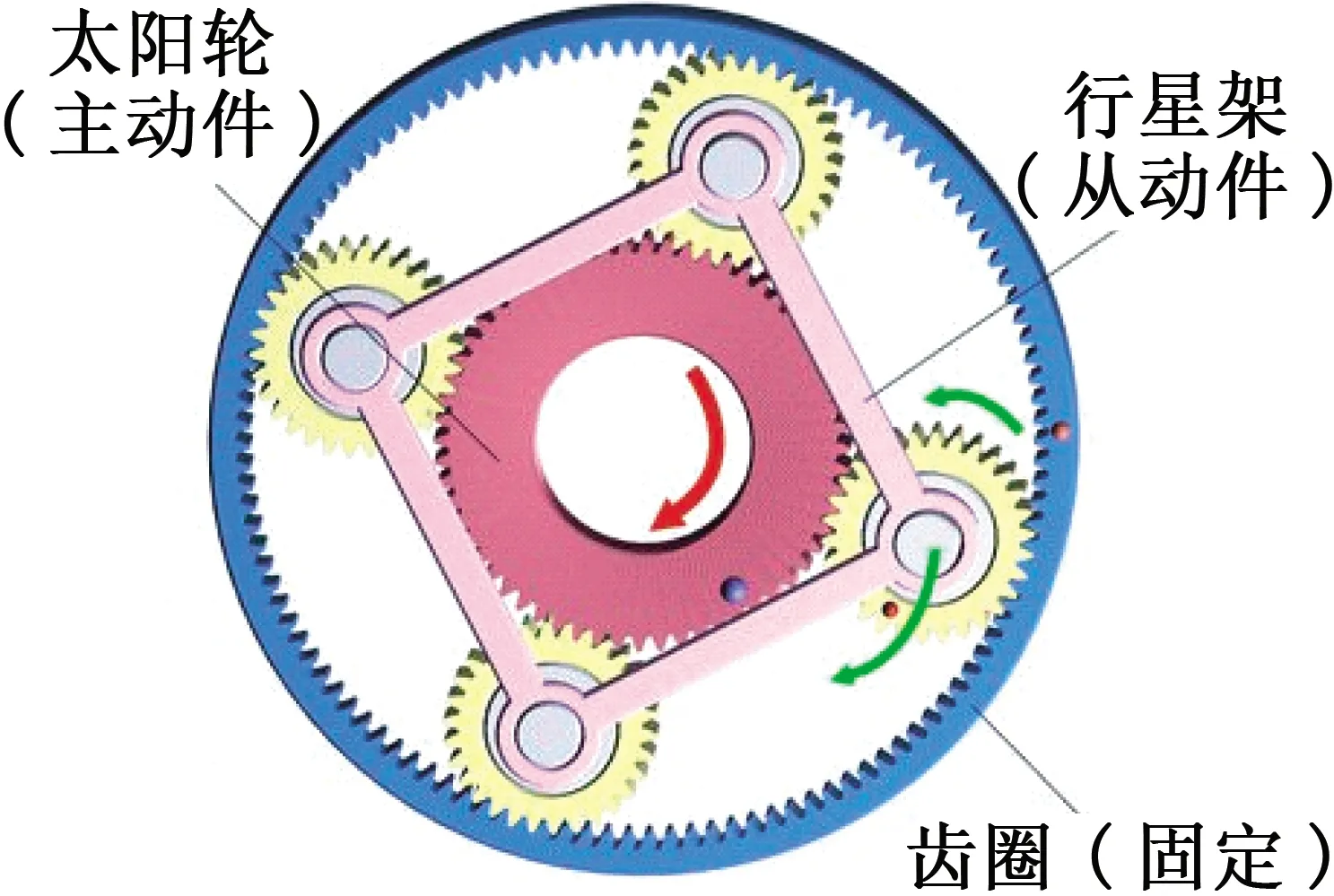
图2 行星齿轮传动机构
行星滚柱丝杠副的运动关系如图3所示,滚柱螺纹同时与丝杠外螺纹和螺母内螺纹进行啮合,等效于行星齿轮传动机构。其中,丝杠s是太阳轮,保持架H是系杆,滚柱r是行星轮,螺母n是齿圈。

图3 行星滚柱丝杠副运动关系图
ds表示丝杠在接触点的直径,dr表示滚柱在接触点的直径,dn代表螺母在接触点的直径,dm表示滚柱的公转直径。当丝杠作为主动件转动时,滚柱沿螺母上的内螺纹表面滚动,犹如滚柱轴承的滚柱运动一样。但是滚柱的运动需要满足下列两个要求:
(a)滚柱相对于螺母运动时,滚柱不自行从螺母中旋出,而是使螺母随滚柱沿丝杠作轴向移动。
(b)滚柱绕丝杠既作公转运动,又作自转运动,同时产生相对于丝杠的轴向运动。
1.2 总体结构匹配设计
标准型行星滚柱丝杠副的设计路线图如图4所示。首先选取丝杠、滚柱中径,根据行星滚柱丝杠副的螺纹传动关系,计算出丝杠和螺母头数;再根据行星运动关系和齿轮啮合原理校核丝杠、滚柱、螺母的基本尺寸,计算滚柱两端的行星齿轮及螺母上齿圈的基本参数;最后对丝杠副相关参数进行优化。
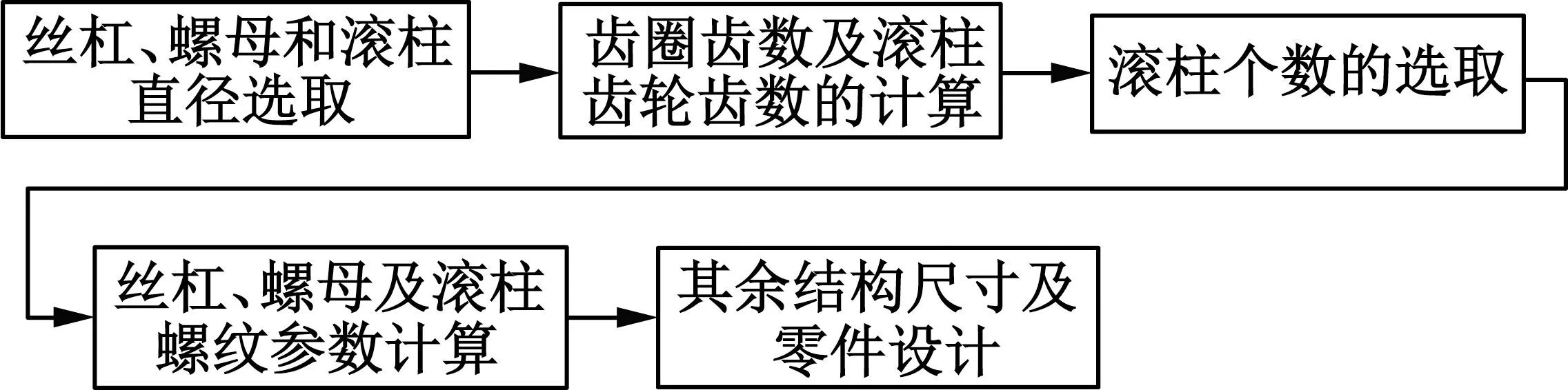
图4 行星滚柱丝杠副结构匹配设计过程
对丝杠、滚柱和螺母主体结构尺寸进行设计计算后,为了保证滚柱丝杠副的装配和正常工作,滚柱丝杠副还必须包含销钉、保持架和挡圈等附属部件,在滚柱两端还需要加工齿轮,与螺母的齿圈进行啮合。附属部件是为适应主要部件的结构而设计的。RV10×2行星滚柱丝杠副的结构尺寸如图5所示。
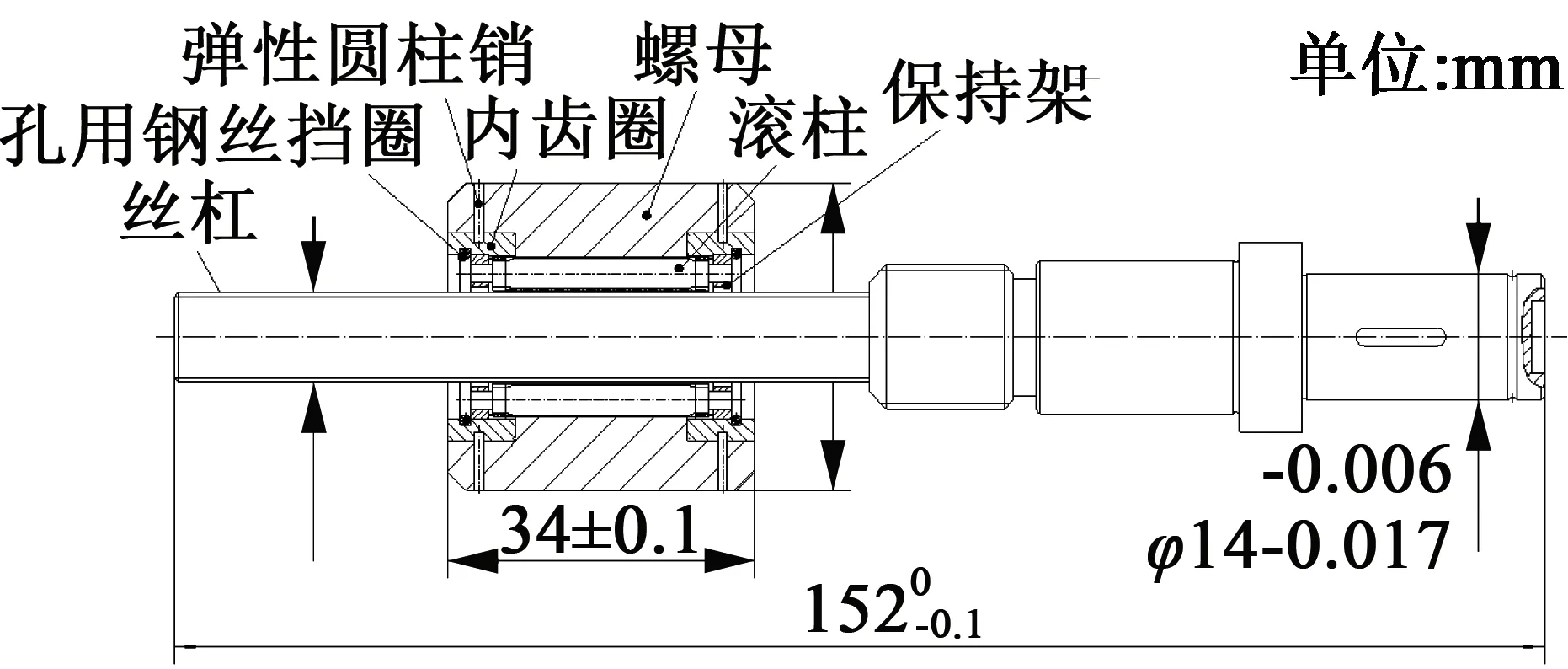
图5 RV10×2行星滚柱丝杠副结构尺寸图
2 行星滚柱丝杠综合性能评价方法研究
行星滚柱丝杠是航天伺服机电组件的关键传动部件,实现运动形式的转换[4-5]。依据航天舵机系统工作需求和行星滚柱丝杠副的特点,提出行星滚柱丝杠综合性能的测试项目及要求,为行星滚柱丝杠副的综合性能评价提供依据。
行星滚柱丝杠副性能测试主要有四个方面:行星滚柱丝杠副的精度特性测试,包含滚柱丝杠的定位精度、重复定位精度及反向间隙测试[6];行星滚柱丝杠副的传动特性测试,包含滚柱丝杠副的传动效率、摩擦力矩的检测;行星滚柱丝杠副的承载特性检测,包括额定静载荷试验及刚性检测;行星滚柱丝杠副的运动特性检测,包括振动及温升。
航天伺服机电组件具有传动精度要求高、传动效率高、承载能力大的特点。传动精度直接影响航天飞行器的飞行姿态及运行轨迹,是航天飞行器用机电组件的关键参数之一;传动效率关系到航天伺服机电组件克服负载的能力,是航天飞行器用机电组件的重要参数;行星滚柱丝杠副的承载能力是机电组件的基本参数,也是机电组件功能实现的必备性能。当行星滚柱丝杠副在大负载工况下工作后,行星滚柱丝杠副综合性能的检验条件为螺纹精度,主要包括单牙误差、全程误差、牙底倒角。航天伺服机电组件工作时间短、传动精度高,行星滚柱丝杠副的运动特性如振动、温升不是机电组件功能实现的关键因素,所以运动特性不作为行星滚柱丝杠副的必须检测指标。
因此,传动精度、传动效率、承载能力是航天伺服机电组件用行星滚柱丝杠副的主要评价指标。
3 行星滚柱丝杠性能试验
根据行星滚柱丝杠综合性能评价方法的研究,对某型机电组件用RV10×2行星滚柱丝杠的传动精度、传动效率、承载能力进行检测。
3.1 行星滚柱丝杠传动精度试验
传动间隙是航天伺服舵机用行星滚柱丝杠的重要参数之一,直接关系到航天飞行器的飞行轨迹,因此,传动精度为该型滚柱丝杠的关键性能指标。
传动间隙是指行程内以某位置为基准位置向同一方向运行一段距离后,再反向运行同样的距离,螺母最后停止位置与基准位置的差值。
利用综合性能试验台和激光干涉仪测量滚柱丝杠的定位精度。在定位精度和重复定位精度测量时,对每个目标位置分别正反向各趋近1次,测量原理如图6所示。选择激光干涉仪内置的国标精度算法,可直接得出行星滚柱丝杠副的定位精度、重复定位精度和反向间隙,测试数据如表1所示。
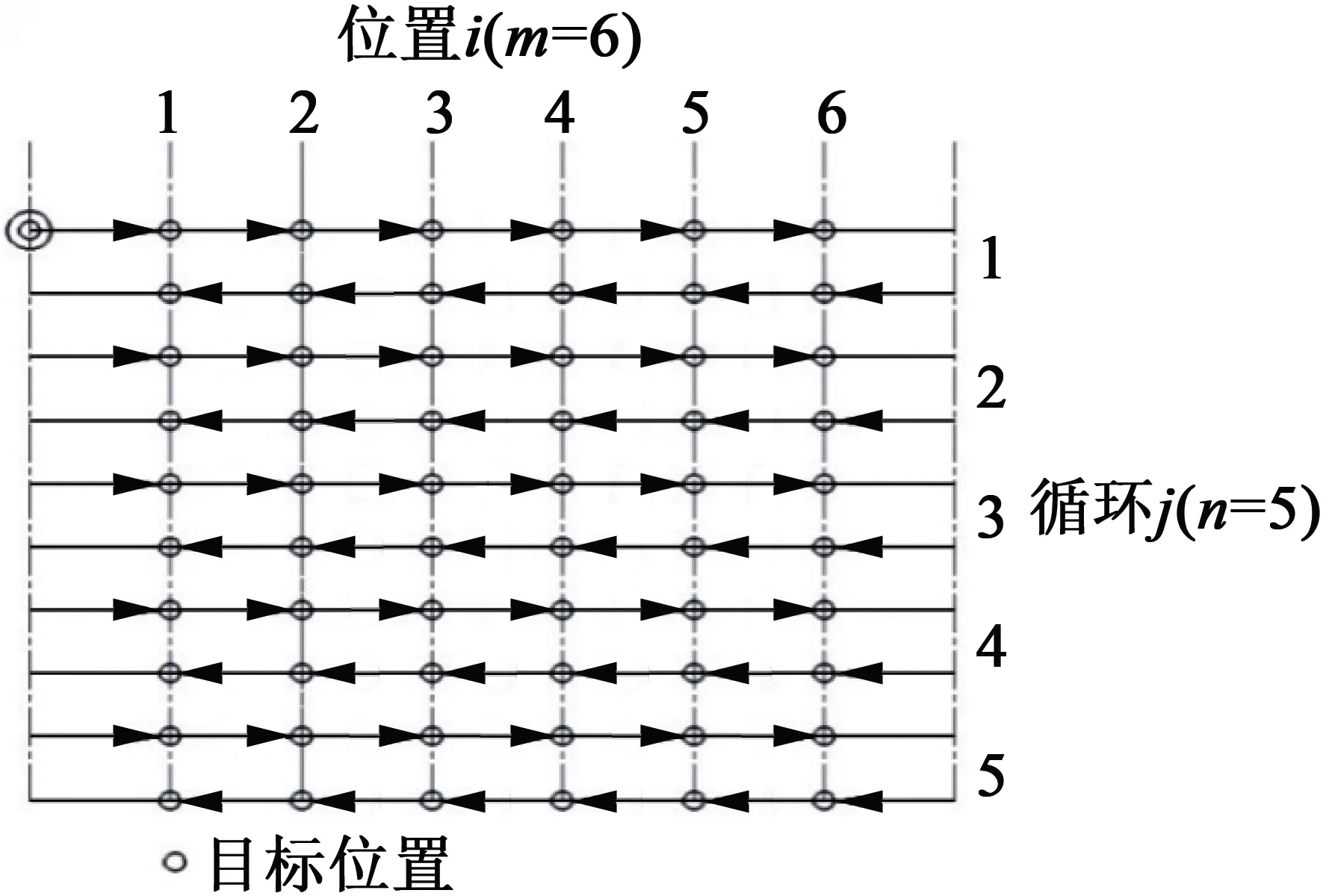
图6 行星滚柱丝杠副精度检测原理
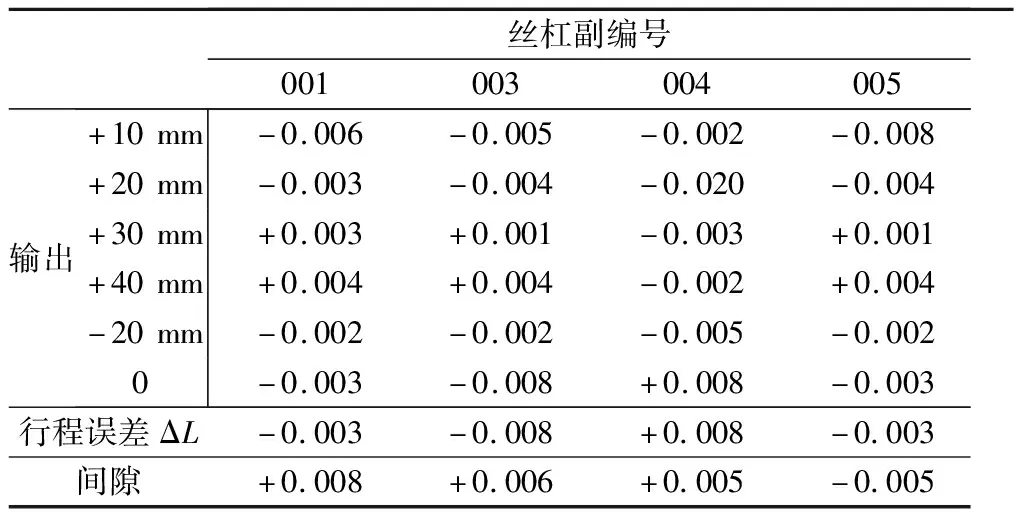
表1 传动精度试验数据表 (单位:mm)
3.2 行星滚柱丝杠承载能力试验
载荷试验台由液压加载系统、伺服驱动系统和电控系统三部分组成。载荷试验装置如图7所示,主要包括伺服电机、丝杠连接工装、螺母连接工装、扭矩传感器、转速传感器、拉压力传感器和液压缸等。
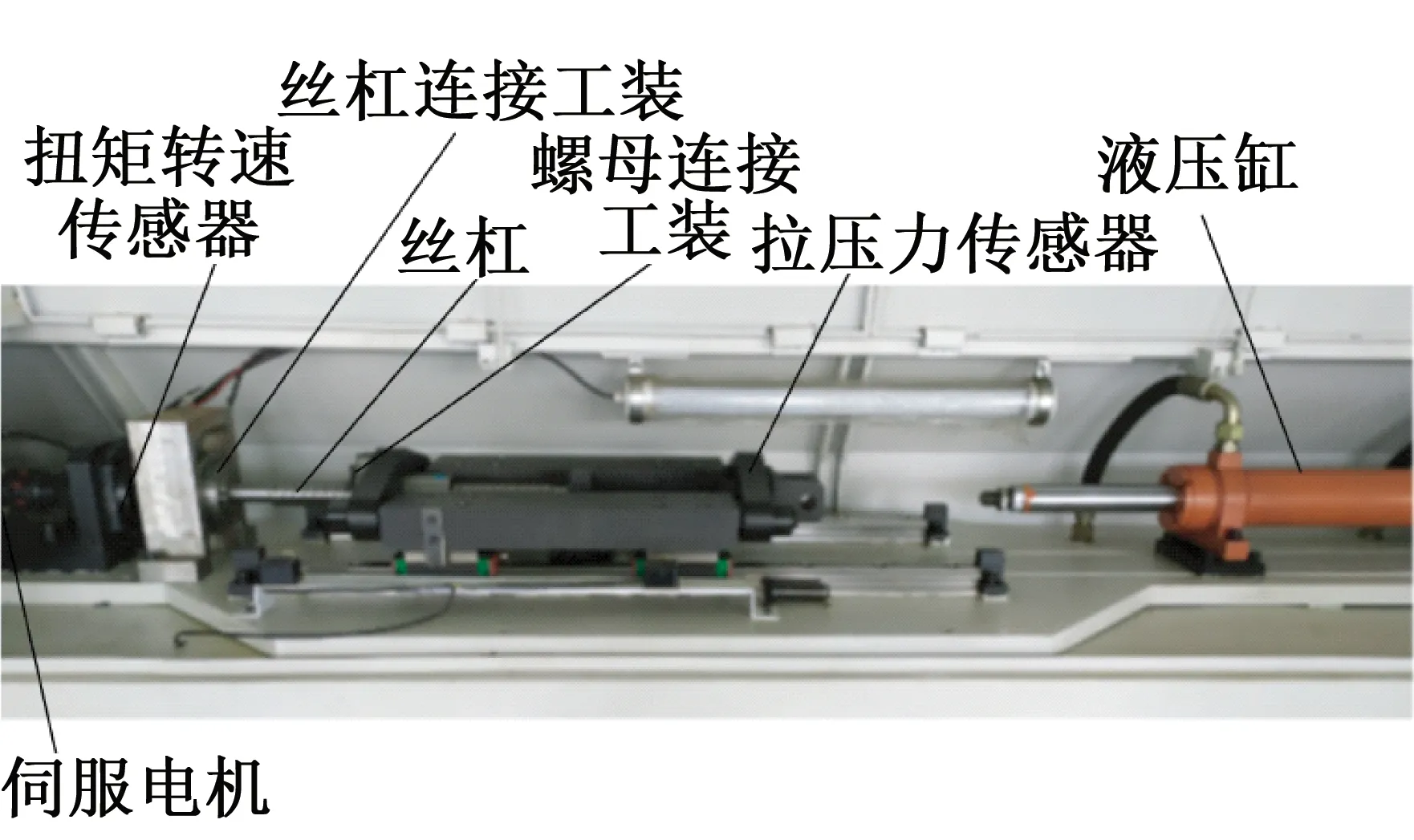
图7 载荷试验台
1)最大静载荷测试
在载荷试验台上,测试丝杠副的最大静载荷。测试流程:通过液压缸沿行星滚柱丝杠副轴向施加最大静载荷,根据拉压力传感器读取丝杠副轴向负载数据,当轴向力达到施加载荷设定值时,进行压力卸载。加载试验结束后,检测丝杠副的螺纹变形量及丝杠的行程误差。滚柱丝杠副的最大静载荷数据如表2所示。
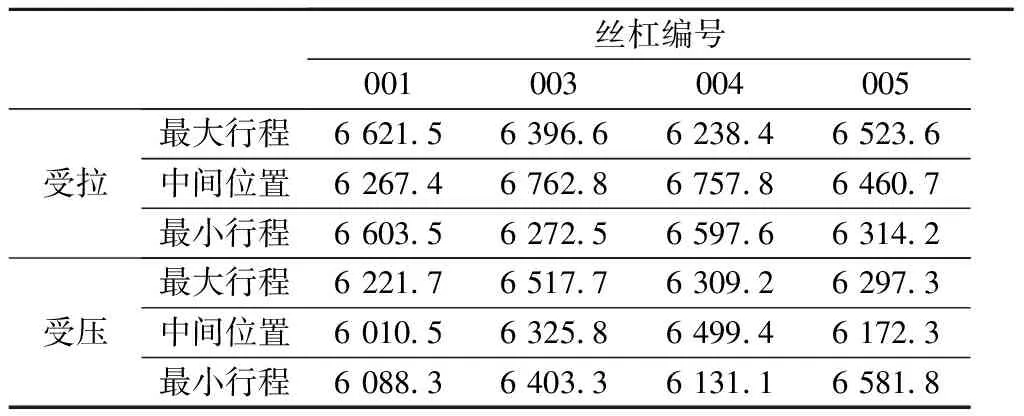
表2 行星滚柱丝杠副最大静载荷数据表 单位:N
检测结果显示,行星滚柱丝杠副在不同位置的最大静载值均超过6 000N,能够满足额定推力3 000N的设计要求。
2)动载效率试验
在动载效率试验中,同时记录丝杠副功率输入端的输入转矩数值和功率输出端的载荷数值,可以计算得到丝杠副的传动效率。行星滚柱丝杠动载效率试验,每项试验均需要做拉力承载和压力承载试验。
式中:η为效率,T为转矩,Fa为拉力或压力,Ph为丝杠导程。
测试中,通过拉压力传感器与力矩传感器的读数可以得到载荷Fa和转矩T的测试结果,代入上述公式即可计算该丝杠的传动效率η,数据如表1所示。
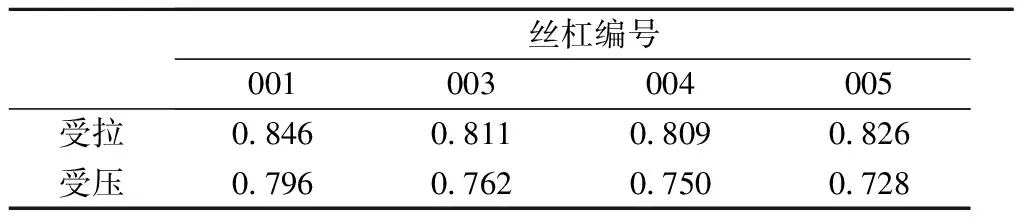
表3 行星滚柱丝杠副动载效率数据表
行星滚柱丝杠承载能力试验结束后,丝杠副运动灵活、无卡滞现象。
3.3 行星滚柱丝杠螺纹精度检测
一般来讲,行星滚柱丝杠的精度特性检测只是传动精度,为行星滚柱丝杠副的宏观精度,但对于行星滚柱丝杠副螺纹的微观精度性能没有过多关注。
用万能工具显微镜,如图8所示,对丝杠副的螺纹牙型及行程误差进行检测。行星滚柱丝杠副的负载主要由螺纹副传递,对行星滚柱丝杠副传动精度检测的同时,检测行星滚柱丝杠副的螺纹牙及行程误差,可以更好地评价行星滚柱丝杠副的综合性能。

图8 万能工具显微镜
对负载试验后的丝杠螺纹进行检测,结果如表4所示。试验后牙形无塑性变形(压痕),丝杠单牙及全程误差均满足要求,丝杠和螺母间的运动无明显卡滞现象,符合设计要求。

表4 丝杠螺纹检测结果数据表
检测结果显示,丝杠螺纹的单牙及全程误差最大不超过0.005mm,远小于整体传动精度0.02mm的指标要求,对传动精度指标的实现提供有力的支撑。
4 结 语
(1)根据行星滚柱丝杠副的运动关系、总体结构匹配,设计了RV10×2行星滚柱丝杠副。
(2)根据航天舵机的实际工况,对航天舵机机电组件用行星滚柱丝杠的综合性能评价方法进行研究,行星滚柱丝杠的传动精度、传动效率、承载能力为航天伺服机电组件用行星滚柱丝杠副的主要评价指标。
(3)对RV10×2行星滚柱丝杠副性能进行检测,符合设计要求;另外,应用RV10×2型行星滚柱丝杠的机电组件已通过总体的各项试验,丝杠行程达到35 mm,额定推力超过3 000 N,组件整体重复定位精度小于0.02 mm,满足要求。