无刷直流电机反电动势观测器增益的优化策略
2021-05-21曲行行绳然曾洁
曲行行,绳然,曾洁
(大连交通大学 电气信息工程学院,辽宁 大连 116028)*
与传统的电机相比,永磁无刷直流电机具有功率密度大、效率高、转矩大、损耗小、成本低等特点,在高性能驱动领域得到了广泛的应用.无刷直流电机转子位置信息对于其运行至关重要,传统方法一般采用基于机械传感器,如编码器或者霍尔传感器来确定转子位置,但传感器的安装使得电机成本增加,可靠性降低,因此无传感器控制成为近几年一个重要研究方向.
无传感器控制首先要解决的问题是转子位置检测,文献[1]中提到了转子检测的基本方法,如反电势法、磁链法和通量计算法等.文献[2-3]提出用检测线电压差来获得转子位置的方法.Umesh Kumar提出了一种新的无位置传感器六开关变结构输入的反电动势零差分检测方案[4].文献[5-6]构造了一种状态观测器检测无刷直流电机反电势的算法估算转子位置.文献[7]在[5-6]的基础上加入了差分进化磷虾群算法(DEKH )进行优化.文献[8]采用灰狼优化算法优化有刷直流电机PID控制取得显著效果.
针对无刷直流电机无感控制,本文改进传统线反电动势状态观测器,加入了线性误差函数,并摒弃传统增益的极点配置求解算法,采用一种群智能算法——灰狼优化算法,对观测器增益系数进行寻优计算,仿真表明,该方法可以加快估算误差收敛速度,使得估计反电势的高频干扰和估计速度的抖动减小,估计速度的绝对平均误差和峰值误差减小.
1 无刷直流电机反电动势观测器改进
1.1 传统反电动势观测器的建立
忽略绕组间互感,将无刷直流电机定子绕组电压方程改写为电流方程的形式,如下:
(1)

(2)

上式系统为可观系统,可构造如下观测矩阵:
(3)
K为矩阵增益系数,选择合适的增益系数,即可完成反电动势信号的观测.
则由式(3)可得出反电动势观测矩阵为
(4)
1.2 传统反电动势观测器的改进
为了使系统得到较快的收敛速度,提高估算量的稳定性,对上述观测器进行改进,加入线性误差函数Sgmf(x),如式(5).
(5)
其中:k1和k2是观测器的非线性误差反馈增益,而“sgmf”表示线性误差函数,具体表示为sgmf(x)=1/(1+e-cx),其中c是可调参数.
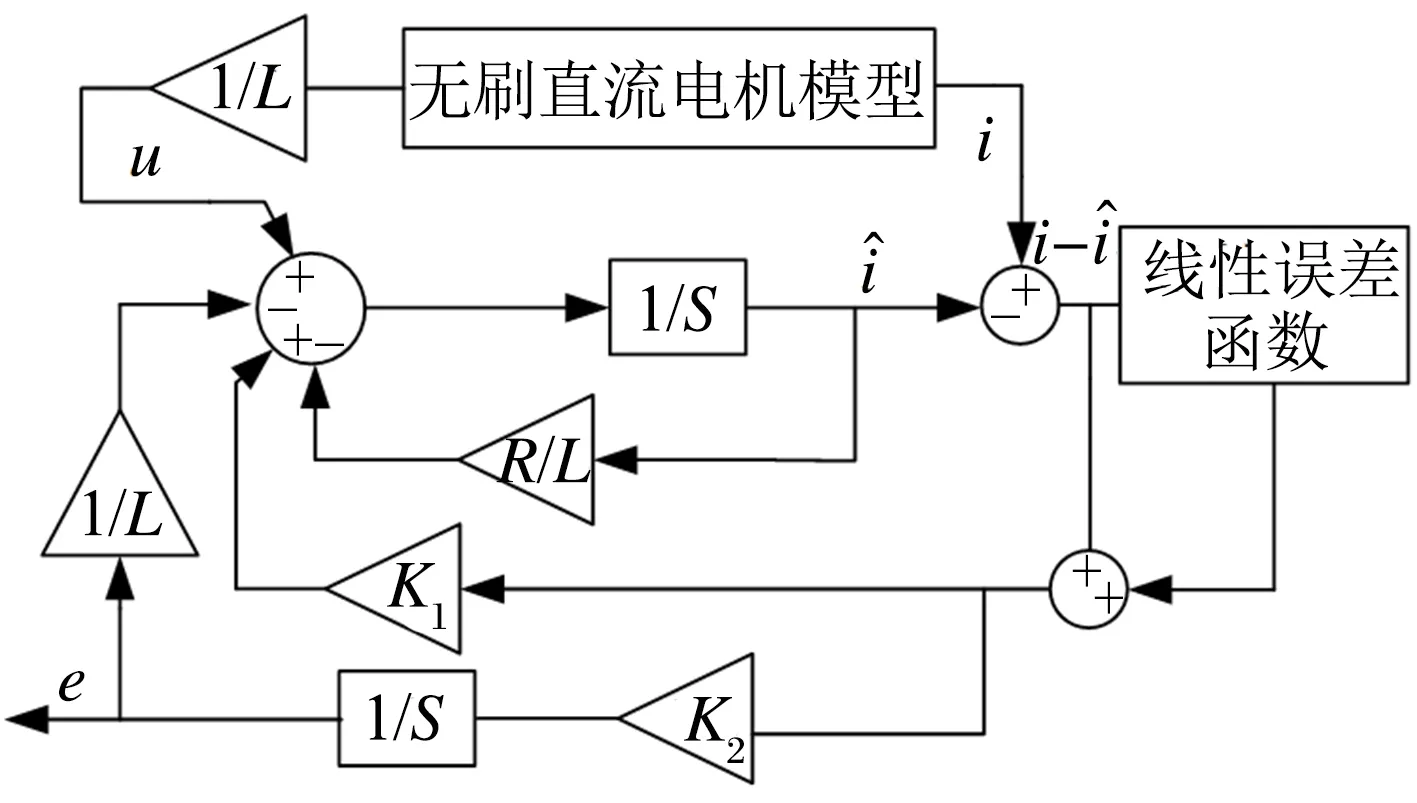
图1 改进后状态观测器框图
选择适当观测器增益对估计状态与实际状态的收敛及稳定性起着关键作用.如图1,改进后的观测器与传统观测器的区别在于,它由一个线性误差函数项和一个以增益K1和K2为特征的非线性误差项组成,线性误差函数项有助于加速观测器误差收敛到零,而非线性误差项则减弱了估计状态量的波动,保证了观测器的鲁棒性.
2 灰狼算法优化观测器增益
2.1 灰狼算法
灰狼优化(grey wolf optimizer,GWO)算法由澳大利亚学者Seyedali Mirjalili 等人于2014年提出[9].该算法模拟狼群种族制度及其搜寻、环绕到攻击的分工狩猎行为,在搜索寻优过程中,通过不断迭代优化获得最优解位置.相较于其他群智能算法该算法可自适应调整收敛因子,很大程度上避免了过早收敛及陷入局部最优解的问题.原理如下:
(1)制定等级制度
灰狼种群一般由15~20个体组成,内部社会等级制度严格,狩猎分工明确.在一个灰狼种群中,将其等级由高到低可分为α、β、δ和ω四种等级个体.狩猎过程中,ω个体负责搜寻猎物,而α、β和δ这3 种个体负责指挥ω移动同时更新自身位置.在满足迭代次数后α、β和δ分别得到的一般解、次优解、最优解[9].
(2)追踪、接近猎物
狩猎过程中,种群在猎物周遭盘旋来寻找最佳狩猎路线,算法表达如下:
D=|C·Xp(t)-X(t)|
(6)
X(t+1)=Xp(t)-A·D
(7)
式中,D代表寻优个体与目标猎物的距离,A、C是猎物的扰动系数,Xp代表目标位置,t为当前迭代次数,X为当前寻优个体位置.
A=2a·r1-a
(8)
C=2·r2
(9)
a=2·(1-t/tmax)
(10)
r1、r2取值范围为[0,1],tmax表示最大迭代次数.上式可以看出,参数A和C主要作用是迫使算法探测与开采搜索空间.随着开采过程中A值的减小,算法将部分迭代用于探索(|A|>1),其余迭代用于开采(|A|<1);而C为猎物提供随机权重,用来随机加强(C>1)或减弱(C<1)猎物与灰狼间的距离,保证了算法的局部开发能力.
(3)狩猎进攻
当确定猎物位置,头狼会联合其他阶层的狼群对整个群体进行指挥,指导狼群包围猎物,最终达到捕食目的.算法描述如下:
(11)
Xα、Xβ和Xδ代表α、β和δ狼当前位置,C1、C2和C3表示对各自间的随机扰动.
(12)
X1、X2和X3代表α、β和δ对ω的指导后位置的更新.灰狼最终位置则表示为:
X(t+1)=(X1+X2+X3)/3
(13)
图2显示了上述狼群在2D搜索空间中位置更新的过程.可以观察到,最终的位置将是在一个由搜索空间中α、β和δ的位置定义的圆内的一个随机位置.换句话说,α、β和δ估计猎物的位置,而ω狼则随机更新它们在猎物周围的位置.
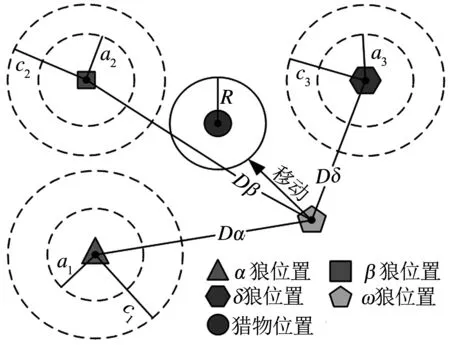
图2 灰狼群狩猎位置更新
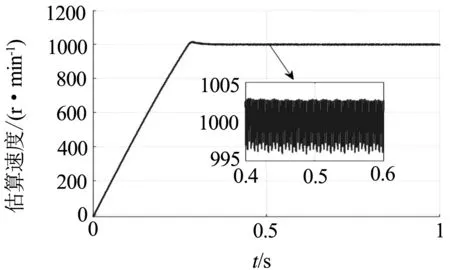
图3 优化流程
2.2 灰狼算法优化观测器增益
利用灰狼算法优异的寻优能力及收敛速度,
将其应用于观测器增益求解上,寻优流程框图如图3所示.
ITAE设置为算法目标函数,其表达式如式(14)所示.按上述算法原理在MATLAB平台编写其优化函数语言.

(14)
误差积分准则ITAE是用系统期望输出与实际输出或主反馈信号之间的偏差的某个函数的积分式表示的一种性能指标.算法将每次优化后得到的参数自动输送给Simulink系统,并存贮对应的ITAE数值.随着迭代次数的累加,狼群不断更新自身位置,当算法达到最大迭代次数,优化完成,系统输出最佳ITAE数值下对应的K1,K2及c值.
较传统极点配置的方法,参数寻优的方法能在电机运行过程中针对外界变化做出动态调整,保证观测器性能的最优化.
3 仿真与分析
根据前文分析,为验证其算法的有效性及可行性,运用MATLAB/Simulink搭建反电动势观测器增益参数优化的无刷直流电机控制系统.设置电机参数如下:额定电压48V,定子电阻Rs=0.2Ω,定子电感为Ls=8.5e-3H,转动惯量J=0.089kg/m2,反电动势系数ke=0.175 V/rad/s,极对数为p=4.
3.1 与传统观测器对比分析
给定速度设为1 000 r/min,迭代次数设为20.运用该算法对系统中线反电动势增益值及可调参数c求解寻优,结果为:ITAE=6.171 943 24;K1=3.115 121 46×103;K2=-5.000 000 00×104;c=0.9785 047 7.
将优化后的观测器与传统反电动势观测器进行了比较,各项结果如图4所示,横坐标代表时间,单位s,纵坐标表示电机转速,单位r/min.
精确的速度估算是判断转子位置准确性的前提.a组为两观测器速度估算值的波形对比,优化增益后的观测器速度估算值可以很好的跟随实际速度值,且误差较为平均,误差值约为±4r,误差率为0.4%,估算鲁棒性较好;而传统观测器的速度估算值并不能很好的跟随,易受外界因素干扰导致波形不稳,且误差在-20~50 r/min.
从b组传统反电动势观测器与增益优化后的反电动势观测器之间的电机实际输出速度对比得出,增益优化后的电机速度超调约为1.5%,传统观测器速度超调约为3%,优化后的观测器明显小于传统观测器,且后期速度平稳无波动.

(a) 增益优化的反电动势观测器
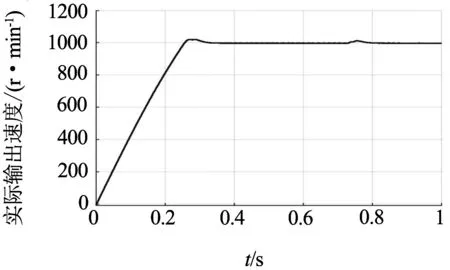
(b) 传统反电动势观测器
3.2 转速突变性能分析
为验证新观测器具有良好跟随性,电机在初始负载转矩为3 N·m的状态下启动,初始速度为1000r/min,当t=0.7 s时转速设定为800 r/min.图5为转速估计值与转速实际值曲线图. 从 图 中可以
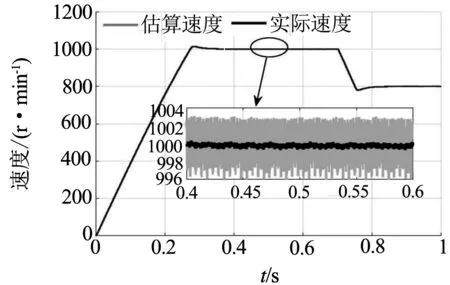
图5 转速估计值与转速实际值
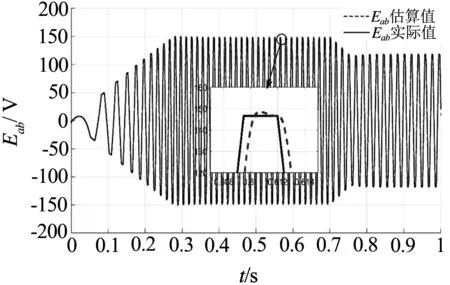
图6 线反电动势Eab估计值与实际值
看出,电机无论在高速状态下还是突然降速,优化后的观测器的速度估算值都可以快速预测跟踪实际值,且转速估计值精度较高,误差率约为0.3%.
此外,从图6反电动势Eab可以看出,观测器估算反电动势值也可以快速跟定实际值,也说明该观测器具有良好的跟随性.
3.3 突加负载性能分析
为了验证所提出的控制算法的抗扰动能力,给定转速设定为1 000 r/min,原定负载转矩Tm=3 N·m,在t=0.5 s时突加负载至20 N·m,仿真结果如图7所示.从仿真结果可以看出当电机突加负载时,转速估计值仍能够快速跟踪实际值,且转速误差也较小,约为0.3%;图8为转矩波形图,从图中看出电磁转矩Te也能快速响应负载变化.
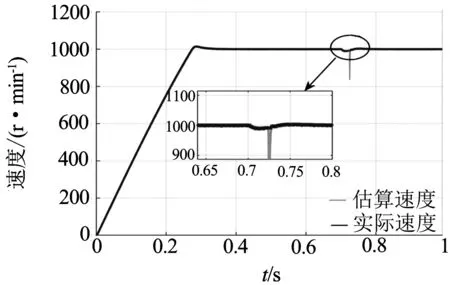
图7 突加负载时转速估计值与实际值
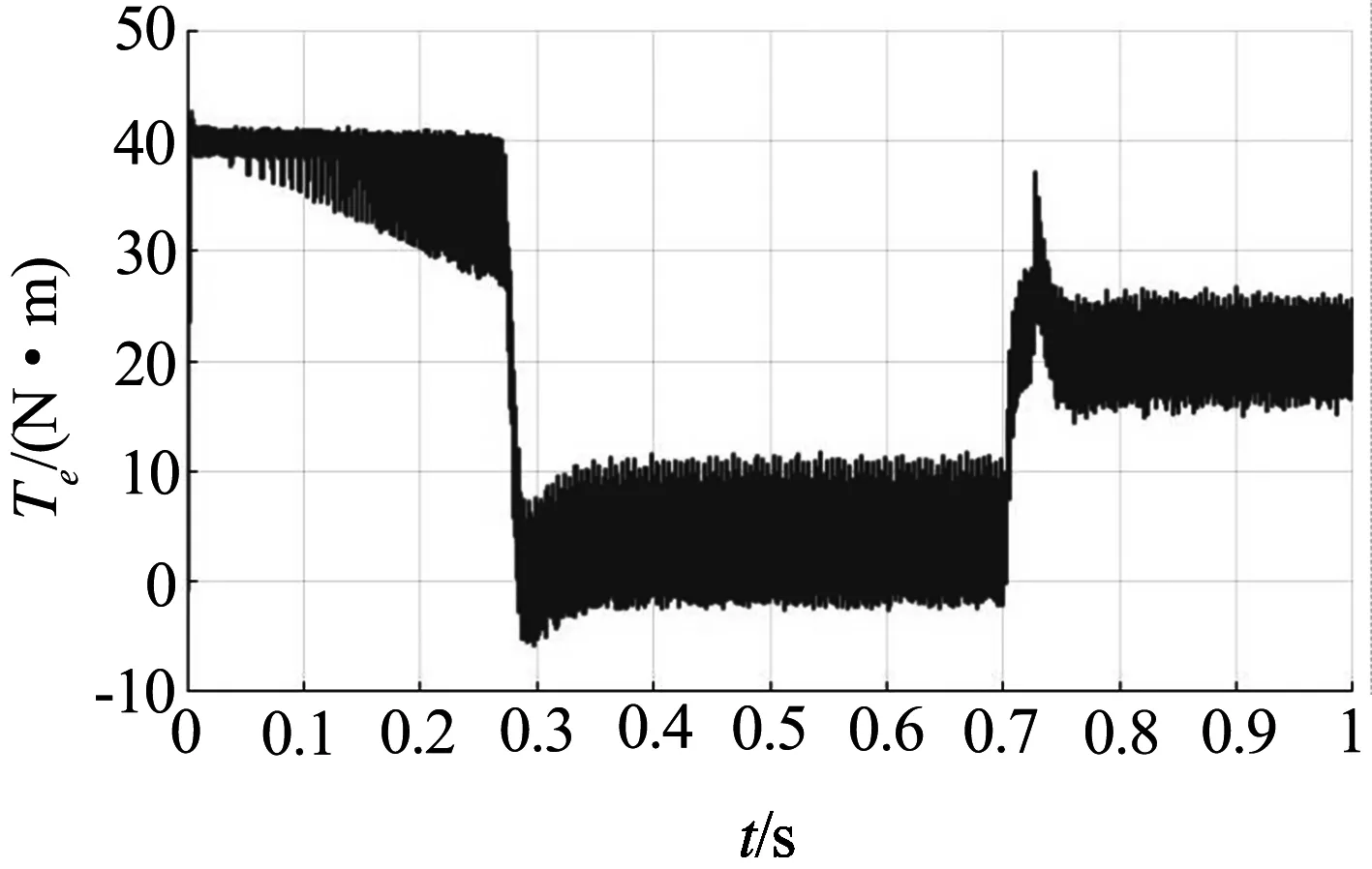
图8 突加负载时转矩
从而说明所提控制算法在突加负载的情况下具有较好的鲁棒特性.
4 结论
本文提出并分析了一种基于灰狼算法的反电动势观测器增益参数的优化方法,将其与传统观测器进行仿真对比,并在不同转速和负载条件下进行仿真,各项仿真结果表明该算法可以很好进行速度及转子位置的估算,并相较于传统方法误差率更小,鲁棒性能更强,对无刷直流电机无传感器控制起到了一定推广作用.
