高速公路作业区智能预警与驾驶行为关系研究
2021-05-21李博超杨睿李青景云超王长帅朱彤
李博超,杨睿,李青,景云超,王长帅,朱彤
(长安大学 汽车学院,陕西 西安 710064)*
道路交通量的不断增长,使部分早期建设的高速公路难以满足现状交通需求而进行了扩容改建工程.同时,每年高速公路养护里程多达5万公里,需要进行大中修的路段也多达5 000 km[1].道路养护及改扩建均需设置作业区,从而占用车道、限制速度,产生车辆排队和速度差的存在,增加交通事故的发生.而高速公路上一旦发生事故,死亡率高、经济损失大[2].
为提高作业区行车安全,美国MUTCD和我国现行标准对作业区临时标志均进行了详细规定和说明.然而,因为存在具体实施的差异性和道路交通的复杂性,作业区交通事故仍时常发生.王博思研究指出,如果提前1s预警,90%的交通事故可以避免[3].目前作业区主要通过传统标志和电子警示设施实现警告降速目的.ZHU、ZHANG、BAI等通过研究指出MUTCD中合流标志、可变信息标志组合和紧急闪光交通控制装置设置和应用可以有效降低作业区上游车速[4-6].如今随着车路协同技术发展,交通安全设施也逐步智能化,XIN、YANG、M.Ahmed、赵晓华等研究指出车载单元、HMI以及CV-VSL可以提供给驾驶人更好的道路状况信息,以降低平均速度,还有助于改善制动决策[7-10].
车路协同技术在感知范围、预警时间方面显著优于传统预警方式,这对于提高驾驶人危险感知和进行驾驶决策具有积极作用.同时,设置于路面的预警方式可以减少驾驶人视线转移,从而减少驾驶任务.目前因为道路车辆性能差异较大和智能交通安全设施应用较少,因此有关人机交互界面及智能交通安全设施对驾驶行为影响的研究较少.本文通过设计三种作业区预警方式:①《规程》预警方式;②HMI预警方式;③智慧道钉群预警方式,来研究驾驶人在不同预警方式下的驾驶行为差异.同时,驾驶人是否知晓新设施功能对驾驶行为的影响也有待研究,故对于智慧道钉群预警方式将告知与不告知驾驶人智慧道钉群功能作为自变量来进行研究.为最大限度贴合实际,研究采取模拟试验法,进而研究驾驶人驾驶行为规律.
1 试验及方案设计
1.1 模拟道路
模拟道路为双向八车道高速公路,设计速度120 km/h.其车道宽度3.75 m,紧急停车带宽度3.5 m,道路两侧及中央分隔带均设置有钢护栏.同时,在路侧按照规范设置有限速标志及警示标志.模拟时间为昼间,天气晴朗.
道路线型如图1所示,全长10 km,包含4个曲线段.在曲线段1前有500 m切直线,曲线段1为转角15°、半径2 500 m的右曲线;在曲线段1和2之间有1 000 m长的切直线,曲线段2为转角15°、半径3 500 m的左曲线;在曲线段2和3之间有1 500 m长的切直线,曲线段3为转角20°、半径2 500 m的右曲线;在曲线段3和4之间有3 100 m长的切直线,曲线段4为转角20°、半径2 500 m的左曲线;曲线段4后为一段切直线.

图1 模拟道路线型(单 位:m)
1.2 试验场景
试验场景作业区设置在曲线段3和4之间,作业区占用1、2车道.作业区警告区从曲线段3结束后切直线100 m位置开始,长度1 600 m.试验设计的不同预警方式即设置在该警告区内.模拟道路设置有交通量,以便更真实的进行模拟驾驶.交通量设置根据车道不同设置有不同速度,其速度值设置为1车道110 km/h、2车道90 km/h、3车道75 km/h、4车道65 km/h.在警告区内设置有减速范围和换道范围,模拟交通流到达该范围会自动减速和换道,实现更真实的模拟场景.作业区后同样设置有变速范围和换道范围,以实现模拟交通流离开作业区后的加速及换道行为.
本文在三种预警方式下设计了4个试验场景:①《规程》场景;②HMI场景;③智慧道钉群场景1(不知晓功能);④智慧道钉群场景2(知晓功能).
场景1为按照《规程》设置安全警示标志下的预警场景(图2),在路侧和中央分隔带初均设置有警示标志,具体设置标志内容和位置如下:
(1)距离警告区终点1 600 m设置“前方施工1 600 m”标志;
(2)距离警告区终点1 200 m设置“限速80”标志;
(3)距离警告区终点1 000 m设置“禁止超车”标志;
(4)距离警告区终点800 m设置“前方施工800 m”标志;
(5)距离警告区终点600 m设置“限速60”警示标志;
(6)距离警告区终点400 m设置“左道封闭,右道通行”标志;
(7)距离警告区终点200 m设置“左道封闭,右道通行”标志.
场景2为HMI预警方式.试验设计是在对模拟软件进行二次开发的基础上,模拟实现车路协同技术下HMI场景(图3),具体显示内容和提示位置同场景1.
场景3和场景4为智慧道钉群预警方式.试验设计的智慧道钉群是基于车路协同的智能交通安全设施,便于安装在高速公路车道线上,同时能够以红绿两种颜色灯进行警示.设置参数为在每条车道线上间隔20 m设置(图4).智慧道钉群设置在整个警告区,长度1 600 m.在警告区开始600 m内,智慧道钉群显示为绿色,然后从靠近中央分隔带的车道线开始,道钉警示颜色变为红色,并按40 m的间隔依次向路侧一侧延伸,此范围为智慧道钉群过渡区,在警告区剩余范围内智慧道钉群全显示红色.
为研究驾驶人是否知晓智慧道钉群功能对驾驶行为的影响,本文在进行场景3模拟驾驶时,要求志愿者在不知晓道钉功能的情况下进行模拟驾驶.然后告知志愿者智慧道钉群功能后再进行场景4.试验设计的智慧道钉群预警功能要求如下:
(1)当车道线上出现绿灯时,表示道路前方1600m处有作业区;
(2)当出现绿灯变为红灯的过渡段时,表明距离警告区终点1 000 m;
(3)在显示绿灯的智慧道钉群路段,需将当前车速降至80 km/h;
(4)在显示红灯的智慧道钉群路段,需将当前车速降至60 km/h;
(5)在过渡段内,绿灯先变红灯的车道表示该车道被占用,绿灯后变红灯的车道表示该车道畅通,要求驾驶人根据提示信息,在之后警告区内采取换道行为.

图2 《规程》场景

图3 HMI场景

图4 智慧道钉群场景
1.3 试验设备
如图5所示,试验是在动态的虚拟环境驾驶模拟器上进行的.该驾驶模拟器由一台主机、三块显示器、音频设备和操作器组成.三块显示器之间夹角为120°,形成的驾驶视野为135°.整个试验场景采用UC-win/road软件搭建,该软件可以记录速度、方向盘转角、车道位置及实时里程位置等数据,数据采集频率为23 Hz.

图5 驾驶模拟试验设备
1.4 志愿者
试验招募了53位志愿者,年龄分布在21~55岁(平均年龄26.63,SD=6.053),均具有驾驶证且驾龄都在1年以上(平均驾龄3.61,SD=3.125).志愿者包含40名男性,13名女性,来自大学学者、个体户、企业职工、货运司机等,身体状况均良好.在数据筛选之后,2名男性和1名女性由于在试验道路上超速过多,其试验数据被剔除,最后剩余50个样本数据,38名男性,12名女性.
1.5 试验流程
试验由基础信息填写和正式试验两个阶段组成.
基础信息填写阶段,要求志愿者填写姓名、性别、年龄、驾龄、有无心生理疾病等信息,未取得驾驶证、驾龄不满一年,以及存在不宜驾驶的心生理疾病者,被排除在正式试验之外.
正式试验阶段,首先告知志愿者驾驶模拟器使用方法,并通过练习场景进行模拟驾驶,熟悉驾驶模拟器油门、刹车、转向盘,待志愿者熟悉设备后进行正式试验.正式模拟驾驶前,告知驾驶人需要在高速公路上行驶一段道路,按照道路上设置的交通标志进行驾驶,同时要求驾驶人在驾驶时要和平常在道路上驾驶一样,所告知信息避开试验目等信息表述.场景1、2、3的顺序是随机的,场景4安排在场景3完成后进行,进行模拟驾驶的同时进行数据记录,最终待四个场景驾驶完成后结束试验.
1.6 数据采集和分析方法
数据采集在整个作业区范围内设置16个点进行采集.首先从警告区起点前400 m开始到警告区终点,间隔200 m设置11个采集点;然后从警告区终点至作业区终点,间隔100m设置3个采集点;最后从作业区终点开始间隔200 m设置2个采集点.采集数据包括:速度、加速度、方向盘转角、车辆所在车道.
试验假设不同作业区预警方式对驾驶行为会产生影响.试验结果通过两种方法进行分析:①通过单因素方差分析和配对T检验法来验证警告区内速度是否有显著差异;②通过对比分析加速度方差来研究加速度改善情况.
2 数据分析
2.1 速度分析
不同预警方式下平均速度曲线图见图6.从警告区起点前400 m位置开始,到车辆通过作业区后400 m范围内,平均速度曲线均呈现“凹”型曲线特征,每条曲线均存在最小速度Vmin.方差分析结果显示,在整个警告区1600m范围内,除警告区起点外(p=0.82),其它数据采集点平均速度均差异显著(p<0.05).
通过配对T检验方法分析,试验设计的四种场景相互之间在大部分范围均差异显著(表1).HMI场景相比于《规程》场景在各点处速度有所减小,但减小值不大(△V=4.280km/h),最小速度位置由警告区终点后100 m前移至警告区终点前200 m(V1min=67.133km/h、V2min=60.137 km/h);对于智慧道钉群场景3,其速度相比于《规程》

表1 配对T检验分析表
场景有所增加(△V=5.480 km/h),而在接近警告区终点位置出现了较大速度差(△V=17.214km/h),最小速度点出现在警告区终点后300 m位置(V3min=72.695 km/h);在智慧道钉群场景4中,其速度相比于《规程》场景,速度减小较大(△V=6.960 km/h),最小速度点出现在警告区终点位置(V4min=60.831 km/h).

智慧道钉群场景4相比于智慧道钉群场景3,在警告区内,后者减速值较小(△V3=24.540km/h、△V4=40.440 km/h),且在警告区最后200m减速值较大(△V后者=10.294 km/h).当驾驶人知晓智慧道钉群功能后,即前者比后者速度减小明显减小(△V前者=3.542 km/h).
统计结果显示,不同场景对最小速度具有影响显著(p<0.05).
2.2 加速度分析
加速度是速度变化量与发生这一变化所用时间的比值,它体现了驾驶人对车辆行驶状态纵向控制的能力[11].在四个试验场景中,智慧道钉群场景4加速度相对平稳(图7).对作业区警告区内加速度进行分析,智慧道钉群场景4的标准差最小(σ1=0.060、σ2=0.056、σ3=0.067、σ4=0.043).对作业区警告区终点前1000m加速度进行分析,智慧道钉群预警方式(场景3和4)方差相比于《规程》预警方式和HMI预警方式,方差较小,且智慧道钉群场景4标准差最小(σ1=0.059、σ2=0.045、σ3=0.032、σ4=0.017).
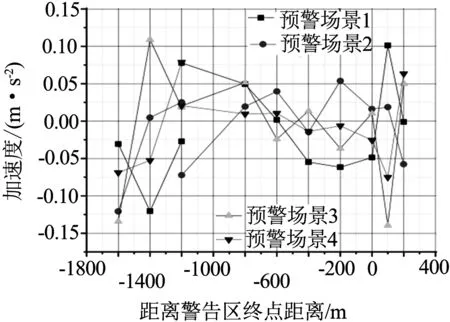
图7 不同预警方式下加速度变化
2.3 换道点分析
位于作业区封闭车道上的车辆,为顺利通过作业区必须在合流点前完成换道,当换道点集中于合流位置时极易引发拥堵并导致更大速度差产生[12].因而,合理的换道位置对于作业区安全至关重要.方差分析结果显示,不同场景的初始换道位置有显著差异(p<0.05),四种场景初始换道位置平均值分别为:L1=-425.62 m、L2=-551.12 m、L3=-305.12 m、L4=-956.68 m(图8).
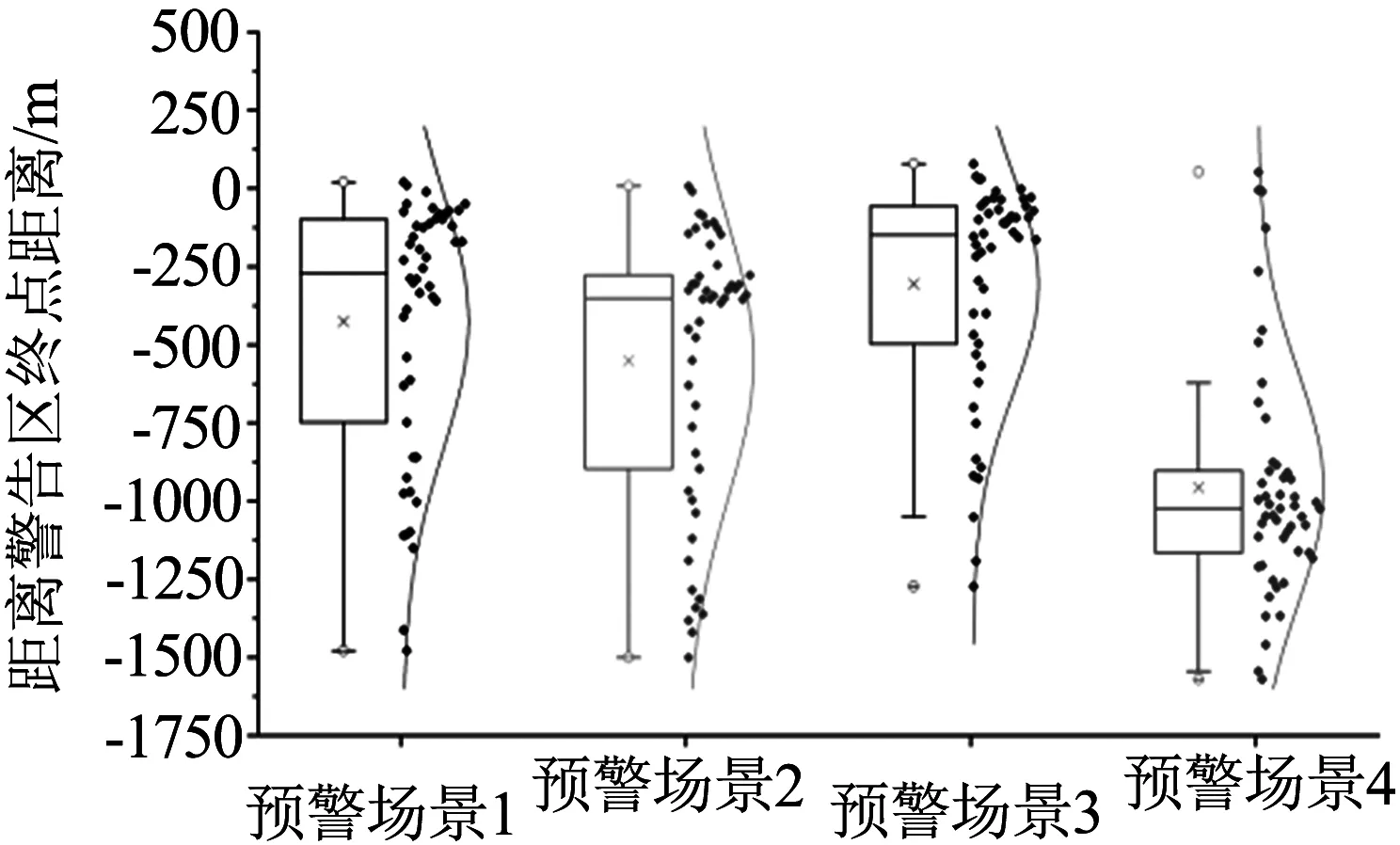
图8 不同预警方式下初始换道位置
对于初始换道位置,《规程》场景集中于-200~0 m路段内、HMI场景集中于-400~-200 m路段内、智慧道钉群场景3集中于-200~0 m路段内、智慧道钉群场景4集中于-1 200~-1 000 m路段内.HMI场景比《规程》场景起始换到位置较早,但是偏移距离不大.在智慧道钉群预警方式下,当驾驶人知晓智慧道钉群功能时,起始换到位置大幅度前移(L3=-305.12 m、L4=-956.68 m).
3 结论
通过对比分析警告区内设置的不同预警方式对驾驶行为的影响,得出以下结论:
(1)不同预警方式对驾驶行为有显著差异.HMI预警方式相比于《规程》预警方式,在降速效果方面有轻微改善,同时在HMI预警方式下,最小速度位置前移至警告区内.智慧道钉群预警方式相比于《规程》预警方式,在驾驶人知晓与不知晓智慧道钉群功能时驾驶行为差异较大.当驾驶人知晓智慧道钉群功能时,速度改善效果明显且减速行为前移,而驾驶人在不知晓智慧道钉群功能时,速度改善效果差且在警告区末端出现较大速度差.因而进行推广使用时需提前对驾驶人进行培训学习;
(2)智慧道钉群预警方式下,加速度变化有所改善,当驾驶人知晓功能时,改善更为明显,这对于驾驶人更好地控制车辆是有益的;
(3)在《规程》预警方式和HMI预警方式下,初始换道位置均接近警告区终点,这是因为换道提示信息设置在距离警告区终点400 m和200 m位置.智慧道钉群预警方式下,当驾驶人不知晓功能时,初始换道位置多集中在警告区终点前,当驾驶人知晓功能时,初始换道位置大幅度前移,这是因为智慧道钉群换道提示信息设置在距离警示区终点1 000 m的位置.而换道提示位置的前移可以提供更多的时间来进行更安全的换道.同时在智慧道钉群的红色灯路段,还可设置更多预警方式来告知作业区信息,如占道情况等;
(4)为研究不同预警方式对驾驶行为影响,试验设计未进行智能交通安全设施与传统标志组合设计,智慧道钉群预警方式也仅有一种,应用场景也限制在高速公路作业区,这使研究具有一定局限性.后续的研究可以进行预警方式组合、多场景、多方式的信息预警,更好地分析驾驶人面对智能交通安全设施时的驾驶行为规律,以指导高速公路智能交通安全设施工程应用,并提高行车安全性.
