齿面形状误差测量中干涉图像有效测量区域分割方法的对比研究
2021-05-19戴雨志盛晓超杨鹏程朱新栋
戴雨志,盛晓超,2,杨鹏程,2,朱新栋
(1.西安工程大学机电工程学院,陕西 西安 710600;2.西安市现代智能纺织装备重点实验室,陕西 西安 710600;3.西安交通大学机械制造系统工程国家重点实验室,陕西 西安 710049)
0 引言
齿轮是机械传动系统中应用广泛的基础部件,其表面形状误差不仅决定设备性能的优劣,而且影响使用寿命的长短。实现齿面形状的高精度测量是提高其制造精度的前提与关键[1-2]。
激光移相干涉测量法是一种表面形貌测量的经典技术,具有高精度、快速、非接触的特点,是实现齿面形状精密测量的重要方法[3-4]。在使用斜入式激光干涉法测量齿轮齿面的形貌误差时,拍摄的干涉图像由有效测量区域(即前景区域)和背景区域组成。干涉条纹区域为有效测量区域,是含有被测齿轮齿面形状信息的条纹区域,干涉图像的噪声区域为背景区域。需要对其进行图像处理才能得到最终的被测面形貌参数[5]。而图像处理的第1步,是从干涉图像的背景噪声中分割出有效测量区域的边界,这是后续所有步骤的基础[6];其次,在分割的有效测量区域内部进行提取相位和相位解包裹,由于干涉条纹区域以外没有有效的相位信息,分割干涉条纹区域太大或太小都会导致错误的相位信息或部分有效相位信息丢失[7];然后,通过配准有效测量区域与真干涉图,建立与实测齿轮齿面之间的映射关系,进而将干涉图中计算出的形状误差信息对应于被测齿面[8]。因此,有效测量区域的分割提取是干涉图像处理的关键步骤,其精度的高低将会直接影响最终测量结果的精度。
在图像处理领域,目标区域的分割方法是图像处理领域的一个典型问题[9-10]。目前,大部分图像分割算法都是针对某一特殊类型图像或某一具体领域的应用,尚无统一应用的图像处理方法。对于斜入式激光干涉测量采集的干涉图像,当前经典的方法是采用干涉图评价系数结合阈值过滤的方法来进行有效测量区域的识别,如相对调制度法[11]、齿面物体像灰度法[8]和同组干涉图共同过滤法[12]。这些方法原理不同,适用的干涉图像也不同,如何针对不同干涉图像选取有效测量区域的分割方法是一个值得研究的难题。
1 激光干涉测量原理
激光干涉测量的原理如图1所示。由激光源发出的激光束经扩束后在偏振分光棱镜的作用下分为2路,分别作为测量光路和参考光路。物体光路的光束在经过光楔后出现偏转,实现以大入射角斜入射被测齿轮齿面,经被测齿面反射后携带了被测齿面的形状信息。参考光路光束经过一系列的透射、反射后,经半反半透镜调整后与物体光路保持共光路,2条光路发生干涉形成干涉条纹。干涉后的光束经成像透镜聚焦后在 CCD 相机内记录下干涉图像。通过压电陶瓷(PZT)带动反射镜移动,实现参考光路中激光相位的变化。

图1 激光干涉测量原理
2 识别干涉图像有效测量区域算法
根据前一节介绍的激光干涉测量原理,在第i个相移步骤中收集到的干涉图像中(x,y)处的光照强度Ii(x,y)可以表示为
Ii(x,y)=A(x,y)+B(x,y)sin [φ(x,y)]
(1)
x,y为干涉图像中每个像素的坐标;A(x,y)为背景的强度;B(x,y)是调制度的幅度;φ(x,y)为初始相位值。
2.1 相对调制度法
在1组移相干涉图像中,各像素的相对调制度被定义为交流分量与直流分量的比值。由于在测量时采用等步距移相法,设每次移相调制的步距为δi,则实测干涉图像在传感器任一点(x,y)处因干涉产生的光强为
Ii(x,y)=Im(x,y)+Ir(x,y)+
(2)
Im(x,y)为测量光光强;Ir(x,y)为参考光光强;i为引入的相位调制序号,i=1,2,…,N,N≥3。得到相对调制度公式为
(3)
由于前景区域中的各像素的光强呈余弦变化,而处于背景区域的像素值一般不变化,因此干涉图像前景区域的调制度要大于背景区域的调制度值(理论上前景区域得相对调制度为1,背景区域的相对调制度为0)。基于此,该方法通过设置恒定调制度阈值Γ1来分割干涉图像的前景区域,规则为
(4)
其中,数字1表示像素处于前景区域中,数字0表示像素处于背景区域内。
在实际计算过程中,由于噪声的存在,所以计算的调制度为一个范围,有效测量区域内调制度数值较大而背景区域较小。调制度阈值的选取决定了对前景区域分割的精度,选取方法在2.4节详细介绍。
2.2 齿面物体像灰度法
获取干涉图像的测量系统包含测量光路与参考光路,此方法需要1幅只包含测量光路的齿面物体像,该图像应在与干涉图像的相同实验条件下获取,获取方式为隐藏来自参考光路的测量光。由于齿面边缘处倒角的漫反射所产生的一些杂散条纹导致图像存在噪声,直接的阈值分割容易造成前景区域与背景交界处识别错误,所以该方法首先统计目标像素(x,y)的k邻域内大于预设灰度阈值Γ2的像素数量,即
Qt(x,y)=Qt(x,y)+1
(5)
然后根据统计结果对像素点(x,y)进行判定:若Qt(x,y)大于邻域窗口像素数量的一半,则判断为前景区域;反之,则为背景区域。规则为
(6)
Qt(x,y)为用来存储满足阈值的像素点数量;G(x+i,y+j)是像素点(x+i,y+j)出的灰度值;k为邻域窗口大小。
齿面物体像灰度法的精度主要受到阈值的影响,若阈值设置过大会将减小有效测量区域的识别面积,过小则会将部分背景区域识别为有效测量区域。
2.3 同组干涉图共同过滤法
这种方法的思想来源是,前景区域的光强随着移相而呈规律变化。因此,前景区域某任意固定位置的像素在拍摄1组移相干涉图像时,该像素至少会有1次亮度较高。因此,通过1个灰度阈值Γ3来统计相同坐标像素在N步移相的1组干涉条纹图中满足阈值过滤条件的次数,再根据统计结果中像素处于亮条纹带次数,判断是前景区域还是背景区域:
Qs(x,y)=Qs(x,y)+1
(7)
Gi(x,y)≥Γ3,i∈[1,N]
(8)
Qs(x,y)为像素(x,y)大于预设阈值的次数,初始值为0;NNUM为一预设的正整数且小于移相步数N。
2.4 阈值确定方法
本文中的有效测量区域识别方法均采用干涉图评价系数结合阈值过滤的方法,因此阈值过滤过程中阈值的选取直接决定了识别精度的高低。阈值的选取过程如图2所示。相对调制度法需要根据计算出的各像素的相对调制度绘制调制度直方图,根据调制度直方图的分布与干涉图的调制度特点确定调制度阈值,优先选取具有明显分界线的数值,其次选取双峰值间的波谷值。齿面物体像灰度法与同组干涉图共同过滤法均为灰度阈值,2种方法的阈值选取原则基本一致,首先根据图像的灰度绘制灰度直方图,然后根据灰度直方图的分布特点选取阈值。优先选择双峰型的波谷作为阈值,其次选择具有明显峰值性的最大峰值,若无明显的峰值性则根据干涉图像有效测量区域面积来确定。如本文干涉图的有效测量区域面积约占整幅图像的40%,则将像素灰度等级为40%左右的灰度值作为阈值。

图2 阈值选取流程
3 实验
为了测试和比较上述3种方法识别有效测量区域边缘的能力,分别将它们应用于2组干涉图像中进行边缘区域识别。对于渐开线斜齿轮的齿面,有序地收集了2组干涉图像(即式(1)中的相移数等于4,每次移相π/2),测试齿轮为渐开线圆柱斜齿轮。
拍摄的第1组四步移相干涉图像如图3所示。调整拍摄状态得到第2组四步移相干涉图像,如图4所示。

图3 拍摄的四步移相干涉图像

图4 调整拍摄状态后拍摄的第2组四步移相干涉图像
首先,将2.1节的相对调制度法应用于图3的干涉图像,通过式(3)计算实测干涉图像的相对调制度,调制度直方图如图5a所示。
根据2.4节阈值选取方法,将调制度阈值Γ1设为0.26,在根据式(5)得到最终的二值化掩模G(x,y),如图5b和图5c所示。
通过对比图5b和图5c的结果,可以发现2.1节的相对调制度法在判断干涉图像的条纹区域边缘时,图5b在背景区域有大量明暗相间条纹规律分布,在图5c的背景区域也出现大量无规则杂散噪声点。相较于2.2节和2.3节的2种方法,这些大量分布在齿面域边缘的干扰条纹,造成齿面域边界识别精度差。出现这种情况的原因是由于移相过程中背景区域存在较大的移相误差。因此,相对调制度法对移相误差的敏感度很高。
在保证与图3干涉图像相同的实验条件下,只保留测量光路,得到第1组的物体光路图,如图6a所示。同样在保证与图4的相同实验条件只保留测量光路,得到第2组的物体光路图,如图6b所示。图7a是图6a的灰度直方图,根据2.4节阈值选取方法,图6a灰度阈值Г2确定为37。在窗口大小确定为3时,利用式(5)和式(6)建立二进制掩模图像,识别结果如图8a所示。图7b是图6b的灰度直方图,基于图7b的灰度直方图,同样的选值原则将图6b的灰度阈值Г2确定为23,在窗口大小确定为3时,建立二进制掩模图像如图8b所示。

图5 相对调制度法的识别结果
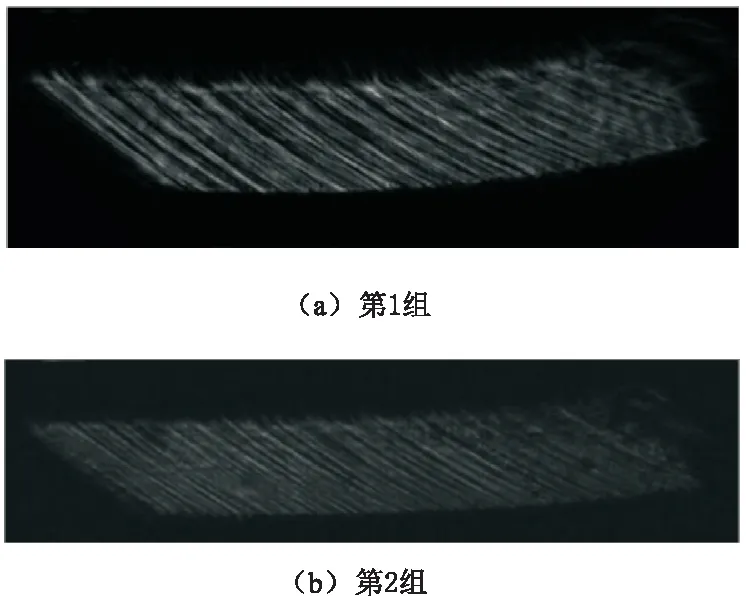
图6 物体光路图
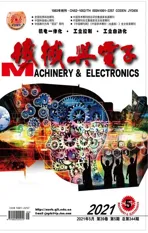
通过对比图8a和图8b的识别结果,可以看到对于同一物体光路图像,图8a入射侧的边界识别结果平滑且均匀,而出射侧的边界识别结果无规则参差分布,这是由于在拍摄物体光路图时,光路在CCD的对焦平面位近于入射侧而远离出射侧,即齿面物体像灰度法对景深敏。另外,图8b的齿顶与齿根的识别结果差异较大,齿面物体像灰度法也受到扩束镜精度的影响。
为了更精确说明对焦平面对该方法的影响,用经典的图像清晰度评价算法对图9b和图9c的边界图像进行评价,结果如表1所示,这些数据清楚地表明图9b边界近于焦点处而图9c边界远于焦点。

图7 齿面物体像灰度法灰度直方图

图8 齿面物体像灰度法识别结果

图9 齿面物体像法识别齿面结果
采用2.3节所述的同组干涉图共同过滤法,首先需要确定这组干涉图像的移相次数,然后根据移相次数确定幅数阈值NNUM。图3b的灰度直方图如图10a所示,根据2.4节将图3灰度阈值Г3设置为52,当幅数阈值NNUM为3时,根据式(7)和式(8)得到结果如图11a所示。图4b的灰度直方图如图10b所示,根据2.4节阈值选取方法将图4的灰度阈值Г3为39,得到的识别结果如图11b所示。很明显,前景区域内部出现很多像素被判断为背景块,而且由于出射侧杂散条纹较多,所示识别的结果中,出射侧识别误差较为明显。
表1 2幅局部边界图像的清晰度评价结果

图10 同组干涉图共同过滤法灰度直方图

图11 同组干涉图共同过滤法识别结果
另外,在拍摄干涉图像时,可以看到图3这组干涉图像与图4这组干涉图像存在较明显的光强差别和条纹差别,这是由于形成2组干涉图像的物体光路与参考光路的重合度不同,光程差也不同。在图11的结果可以明显看出,光路对于2组图像的识别结果的影响,即同组干涉图共同过滤法对于光路的相干性敏感。此外,在图11b中齿顶与齿根亮度较低,因此该方法也受到扩束镜精度的影响。
4 结束语
本文针对用激光移相干涉法测量齿轮齿面形状误差中,干涉图像中有效测量区域的精确识别这一难题,分析了算法理论,给出了阈值的选取方法,进行了实验验证。
通过对比相对调制度法、齿面物体像灰度法和同组干涉图共同过滤法,以及它们用于识别干涉图像有效测量区域的试验结果,分析了它们的优缺点与影响因素:相对调制度法受到单幅干涉图像影响较小但易受实验过程中移相的影响;齿面物体像灰度法不会受到背景区域杂散条纹影响,但需要额外的齿面物体像且受到对焦区域的影响;同组干涉图共同过滤法算法简单,对于实验过程要求较高。尤其是齿面物体像灰度法,需要在拍摄干涉条纹图时遮挡参考光路收集齿面物体像。在移相误差相对较小时,可使用相对调制度法识别干涉条纹区域;而齿面物体像灰度法适用于齿厚较小且焦平面在齿面中间位置时,所拍摄的物体像的有效测量区域的识别;对于移相步距较小、实验操作严格的高质量干涉条纹图像,可采用同组干涉图共同过滤法。