驾驶人抑制控制对风险驾驶行为的影响研究*
2021-05-12杨国松张康康
袁 伟,杨国松,付 锐,张 智,张康康
(长安大学汽车学院,西安 710064)
前言
在由驾驶人、车辆和道路环境所构成的道路交通系统中,驾驶人作为系统的重要组成部分,对道路交通及其安全起到不可替代的作用[1]。国内外关于驾驶行为研究证实,驾驶人的风险驾驶行为是导致道路交通事故的一个重要因素[2],而驾驶人认知能力对其驾驶过程中的行为产生显著影响[3],通过对驾驶人认知能力的研究有望解释和减少道路交通事故的发生[4]。抑制控制作为重要的认知能力之一,其作用是使驾驶人能够有效抵制外界诱惑而不被自身冲动所驱使,从而去执行更需要或更恰当的行为[5],对驾驶人在驾驶过程中的感知和决策行为都产生显著影响[6]。
国内外的一些学者对抑制控制和风险驾驶行为间的关系进行了初步研究,为从驾驶人认知能力入手提高道路交通安全提供了理论基础。Fillmore等[7]采用线索化Go/NoGo 任务范式和模拟驾驶任务,根据是否饮酒将被试分为实验组和对照组,进行重复实验与测试分析,结果表明实验组的Go/NoGo任务反应时和误报率都明显增加,且其风险驾驶行为同时增加,而实验组和对照组的误报率都与其制动失效比例和行驶过程中压线次数成正比。Cascio等[8]采用Go/NoGo 任务范式对抑制控制进行测试,并使用核磁共振技术从神经层面研究和解释抑制控制与驾驶行为之间的关系,结果表明脑部右额区是与抑制相关的脑内源区,右额区激活越明显,则驾驶人的安全驾驶行为越多。Ross 等[9]采用线索化Go/NoGo 任务范式和Stop⁃Signal 任务范式对抑制控制进行测试,并设计了包含多种驾驶事件的模拟驾驶任务,结果表明Stop⁃Signal 任务反应时与车道偏移标准差和碰撞次数成正比,Go/NoGo 任务误报率与碰撞次数成正比。Owsley等[10]对冲动性人格特质与风险驾驶行为之间的关系进行了研究,通过艾森克人格测试量表对305 名驾驶人的冲动性人格特质进行了测量,并使用驾驶行为问卷对驾驶人风险驾驶行为进行了评估,结果表明高冲动分数的驾驶人具有更明显的驾驶错误和违规行为。庄明科等[11]对风险驾驶行为影响因素与交通事故间的关系进行了研究,通过风险驾驶行为调查问卷并结合探索性因素分析,得到风险驾驶行为的一般性和攻击性违规、无害性和危险性失误4 个重要因素。Hennessy[12]对驾驶人情绪与风险驾驶行为的关系进行了研究,结果表明在驾驶过程中的消极情绪会影响驾驶人对外来刺激的反应水平,这将会影响驾驶人对于道路上其他驾驶人驾驶行为的理解,从而触发驾驶人风险驾驶行为。Cheng 等[13]对驾驶人冲动性与风险驾驶行为的关系进行了研究,采用冲动性量表对驾驶人进行分类,并使用Stroop 任务范式对抑制控制进行测试,通过调查问卷对风险驾驶行为进行评估,结果表明冲动程度较高的驾驶人具有更多的风险驾驶行为,并且更难以抑制自己的反应,而Stroop 任务范式得分越低,则其风险驾驶行为中的违规分数越高。
现有研究成果表明驾驶人抑制控制能力与驾驶安全性间具有紧密联系,但是学者们对于风险驾驶行为的测试多采用自我报告等主观问卷形式展开,基于驾驶行为绩效进行评估的方法较少。因此,有必要基于行为层面探讨抑制控制与风险驾驶行为之间的关系,本文中结合驾驶人抑制控制和风险驾驶行为特征,建立模拟驾驶场景,通过模拟驾驶实验任务分析驾驶人风险驾驶行为与抑制控制之间的关系。
1 实验方法
1.1 实验设备
本文中基于驾驶模拟器硬件和交通场景仿真软件SILAB 开发了驾驶模拟器系统,该系统可具有实验场景自主选择、实验场景动态组合、安全可靠性高、数据采集精度高和成本较低等优势。图1 展示了本文采用的驾驶模拟器系统的驾驶场景。

图1 模拟驾驶系统
1.2 被试选取
本文的研究对象为驾驶人,因此要求被试需要持有驾照且有驾驶经验,且近2 年在驾驶过程中未发生过重大交通事故。最终共招募51 名驾驶人,其中32 名男性,19 名女性,均为右利手,平均年龄为25.5 岁,标准差为2.42 岁,平均驾龄为3.3 年,标准差为1.25年。
1.3 心理学任务
在常用的测试抑制控制能力的心理学实验范式中,Go/NoGo 范式要求被试在部分试次中抑制处于优势的行为反应[14],这需要被试在复杂的实验环境下精准地控制动作反应,所以该范式能够较好地评估抑制控制能力。因此,本文中采用Fillmore提出的线索化Go/NoGo 范式任务[15]测试驾驶人的抑制控制能力,Derefinko 等[16]和Roberts 等[17]的研究均表明该范式是一种有效测试抑制控制能力的方法。线索化Go/NoGo 范式的实验材料包括线索材料和刺激材料两种。其中线索材料包含Go 线索和NoGo 线索,而刺激材料包含Go 刺激(绿色矩形)和NoGo 刺激(蓝色矩形)。当线索材料出现后,被试可根据线索类型判断显示Go 刺激或NoGo 刺激的概率。正式进入实验程序后,屏幕上会出现文字提示,要求被试看到屏幕上出现绿色矩形(Go 刺激)时,应该快速按下空格键,则记为反应正确;相反,当被试看到屏幕上出现蓝色矩形(NoGo 刺激)时,则不能按下空格键,否则将被视为反应错误,被试应尽可能地减少错误反应。实验流程如图2所示。

图2 线索化Go/NoGo任务实验流程图
1.4 模拟驾驶任务
为通过模拟驾驶任务中的风险决策指标来评估驾驶人的风险驾驶行为表现,结合常见的风险驾驶行为并依据其相应的风险决策特征,设计了触发驾驶人风险决策行为的18 种风险决策事件(单黄实线遇慢车、右转遇行人、丁字口车辆突然驶入、限速40 km/h 等),并基于交通场景仿真软件SILAB 建立仿真场景。为更全面模拟真实道路驾驶环境,对上述风险决策场景进行随机挑选组合,最终实验任务包含23种风险决策事件,见表1。
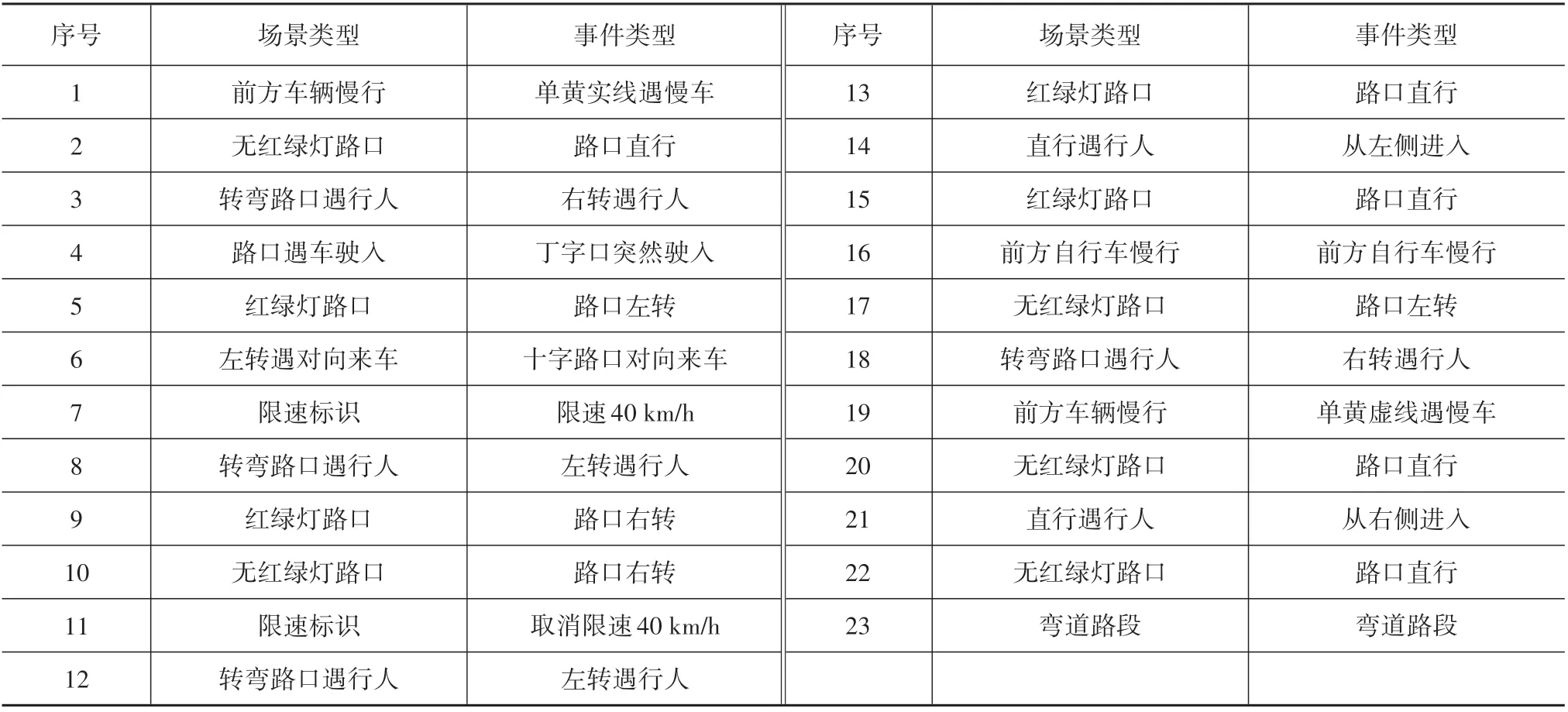
表1 风险决策事件类型及顺序
2 抑制控制能力特性分析
2.1 行为客观指标分析
在本文采用的实验范式中,体现抑制控制的客观指标有两个:Go 刺激反应时和NoGo 刺激误报率(错将NoGo 刺激作反应的错误比例)[18],Go 刺激反应时越短或NoGo刺激误报率越高,则代表抑制控制能力越弱[19]。对51 名被试在心理学实验任务中的Go 刺激反应时和NoGo 刺激误报率进行频数分布统计,如图3和图4所示。
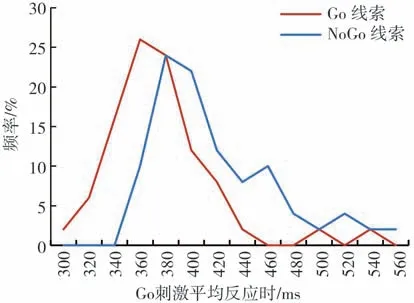
图3 Go刺激平均反应时频数分布图
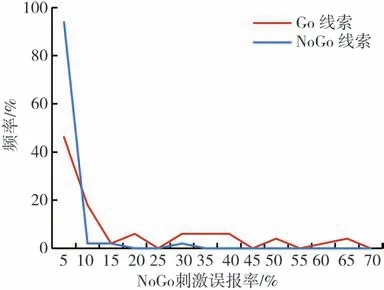
图4 NoGo刺激误报率频数分布图
由图3 可知:两种线索类型Go 刺激平均反应时的分布特征存在差异,Go 线索类型主要分布在300~420 ms 区间,占比92%;NoGo 线索类型主要分布在340~480 ms 区间,占比90%。对两种线索类型Go刺激平均反应时进行均值分析,Go线索类型均值为364.83 ms(最小为291.47 ms,最大为526.57 ms,标准差(SD)为41.59),NoGo 线索类型均值为408.59 ms(最小为345.80 ms,最大为556.49 ms,SD为49.88)。结果表明,线索材料的不同对被试的抑制能力产生了影响,在Go 线索之后,将有80%的概率会出现Go刺激,因此被试可能会降低对于优势反应(Go 刺激)的抑制能力,导致Go 线索类型低于NoGo线索类型的平均反应时。
由图4 可知:两种线索类型NoGo 刺激误报率的分布特征存在差异,Go 线索类型主要分布在0~40%区间,占比90%;NoGo线索类型主要分布在0~5%区间,占比94%。对得到的数据进行统计分析,Go 线索类型均值为14.13%(最小为0,最大为63.16%,SD为18.4%),NoGo线索类型均值为2.14%(最小为0,最大为26.39%,SD 为4.3%)。结果表明,线索材料的不同对被试的抑制能力产生了影响,在Go线索之后,将有80%的概率会出现Go 刺激,因此被试可能会降低对于优势反应(Go 刺激)的抑制能力,导致Go线索类型高于NoGo线索类型的平均误报率。
2.2 高低抑制控制组差异性分析
本文中通过因子分析将驾驶人抑制控制能力表征参数作线性组合化为少数几个综合变量因子,再采用聚类分析以抑制控制相应因子的得分作为聚类指标,将总体被试分为两个群体:高抑制控制组(共34 人,其中22 名男性,12 名女性,平均年龄为26 岁,标准差为2.37 岁,平均驾龄为3.5 年,标准差为1.32 年)和低抑制控制组(共17 人,其中10 名男性,7 名女性,平均年龄为24.4 岁,标准差为2.29 岁,平均驾龄为3年,标准差为1.19年)。对心理学实验客观指标在两组之间的差异性进行分析,独立样本t检验结果见表2。
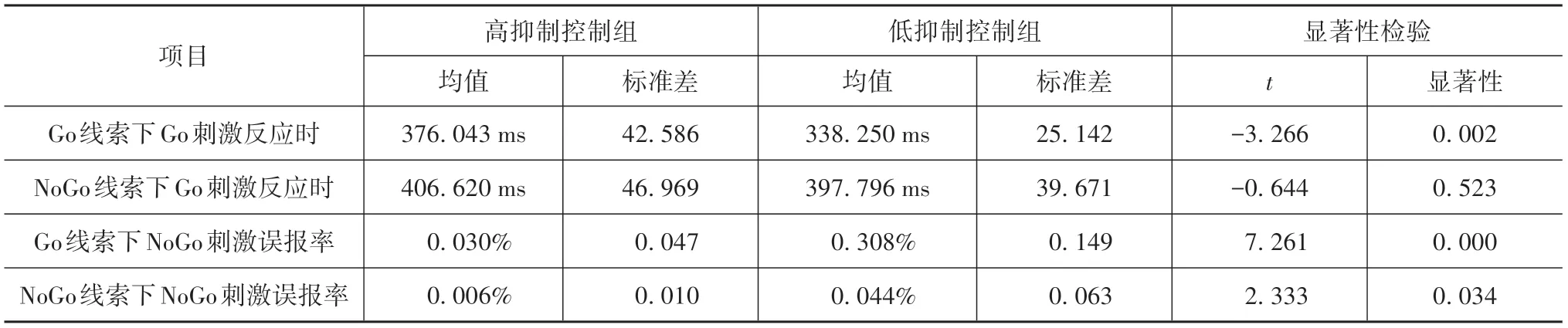
表2 客观指标差异性分析
由表2可知:高抑制控制组在Go线索类型Go刺激反应时(t=-3.266,p<0.05)、Go线索类型NoGo刺激 误 报 率(t=7.261,p<0.05)和NoGo 线索类型NoGo 刺激误报率(t=2.333,p<0.05)的均值方面与低抑制控制组存在显著性差异。高低抑制控制组在Go 刺激平均反应时和NoGo 刺激误报率上的均值差异如图5和图6所示。
由图5可知:高抑制控制组在Go线索类型Go刺激反应时(均值为376.043 ms,SD 为42.586)上显著高于低抑制控制组。说明高抑制控制组被试在整个实验过程中和面对Go线索类型刺激反应过程中,明显体现出比低抑制控制组更强的抑制能力,而在面对NoGo线索类型刺激过程中,两组被试的反应时没有显著性的差异。

图5 Go刺激反应时箱线图

图6 NoGo刺激误报率箱线图
由图6可知:高抑制控制组在Go线索类型NoGo刺激误报率(均值为3.00%,SD 为4.7%)和NoGo 线索类型NoGo 刺激误报率(均值为0.60%,SD 为1%)上显著低于低抑制控制组。说明在整个实验过程中以及面对Go 线索类型和NoGo 线索类型刺激过程中,高抑制控制组明显比低抑制控制组具有更强的对于优势反应(Go 刺激)的抑制能力,故误报率显著低于低抑制控制组。
3 风险驾驶行为特性分析
3.1 风险行为倾向评估
在模拟驾驶任务中,评价驾驶人风险行为倾向的直接指标为驾驶人在风险决策事件中的决策表现得分之和,驾驶人决策表现分为安全决策与风险决策,相应的得分为1分和0分。决策表现得分越低,说明被试在模拟驾驶任务中表现出的风险行为倾向越高,各个事件中对于风险决策行为的定义见表3。
对51 名被试在驾驶过程中的风险决策表现得分进行频数分布统计,结果如图7所示。
由图7 可知:决策表现得分主要集中分布在12~19 区间,约占总数的77%。其均值为15.39(最小为7,最大为23,SD 为3.666)。被试得分分布大致呈现正态分布,整体风险水平处于中等水平,风险行为倾向极高或极低的被试占比非常小,只有少数被试表现出较高的风险行为倾向。
本文中设计了10 种风险决策场景,从风险决策情境的角度出发归为6 类风险决策情境:红绿灯、无红绿灯、限速标识、与行人交互、与车辆交互和弯道路段。对51 名被试在风险决策情境中的风险决策百分比进行频数分布统计,结果表明,被试在无红绿灯和弯道路段类型中表现出更高的风险行为倾向。在这两类情境中,驾驶人处于类似“两难决策(Go/NoGo)”的选择情境,为了保证行车安全在通过路口或进入弯道前应提前降低车速。但当驾驶人以匀速或加速行驶时,目前的驾驶状态(踩下油门踏板)对于驾驶人来说是优势反应,若减速就须放弃目前驾驶状态而采取减速措施,这就需要驾驶人的抑制能力。此时大脑认知功能区域会进行激活信号和抑制信号的相互博弈,最终做出决策结果。

表3 风险决策行为定义
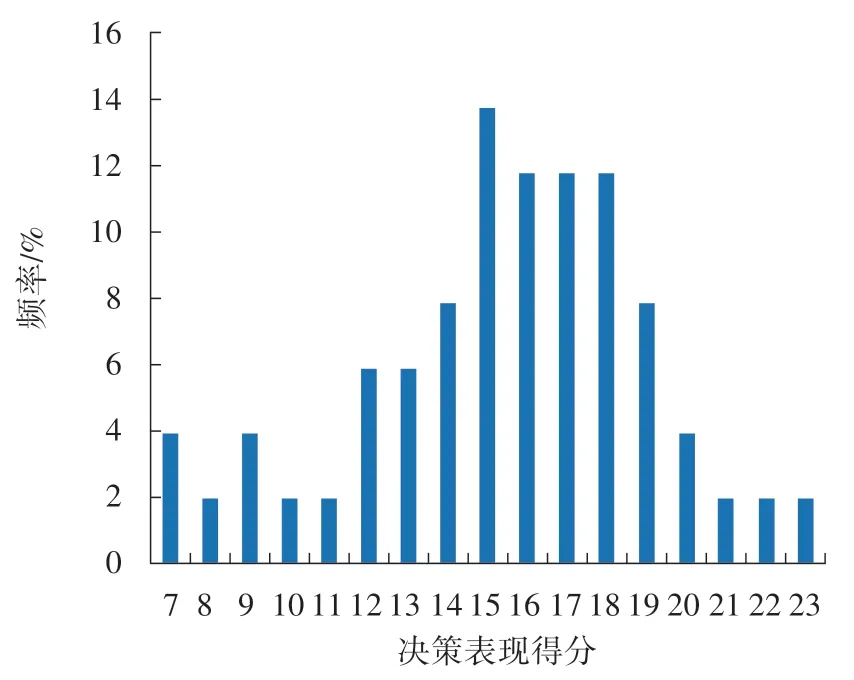
图7 决策表现得分频数分布图
对高低抑制控制组的决策表现得分进行频数分布统计,结果如图8所示。
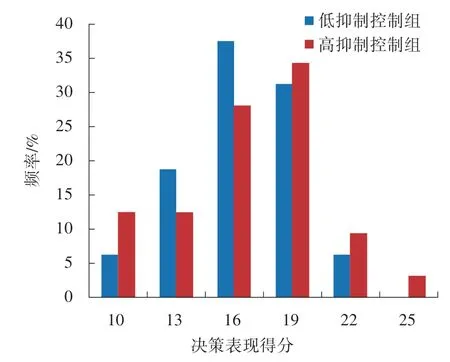
图8 高低抑制控制组决策表现得分频数分布图
由图8可知:两组表现得分分布特征存在一定差异,低抑制控制组表现得分主要分布在16~19 区间,占比38%;高抑制控制组表现得分主要分布在16~19区间,占比34%。对高低抑制控制组表现得分进行均值分析,高抑制控制组表现得分均值为15.78(最小为7,最大为23,SD 为3.933),低抑制控制组表现得分均值为15.06(最小为7,最大为20,SD 为3.214)。结果表明,高低抑制控制组的决策表现得分均值存在一定差异,但是差异并不明显。对高低抑制控制组的风险决策百分比进行差异性分析,结果见表4。
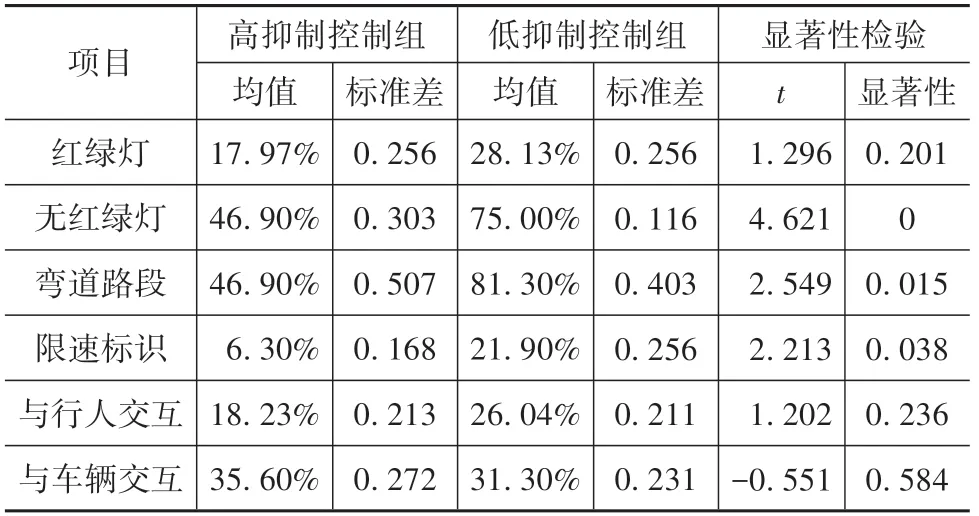
表4 风险决策百分比差异性分析
由表4 可知:高抑制控制组在无红绿灯类型(t=4.621,p<0.05)、弯道路段类型(t=2.549,p<0.05)和限速标识类型(t=2.213,p<0.05)均值方面与低抑制控制组存在显著性差异。根据被试在无红绿灯和弯道路段类型中表现出更高的风险行为倾向,可以得到抑制控制与风险行为倾向存在相应关系,抑制控制相对较低的被试在面对风险决策情境时,表现出更高的风险行为倾向,即在驾驶过程中可能具有更高的违章和事故概率。
3.2 驾驶行为模式分析
本节将分析被试在模拟驾驶过程中车辆运动参数和驾驶行为指标上的差异,以比较不同风险行为倾向被试所对应的驾驶行为模式,主要从速度选择和车道保持两方面对驾驶行为模式进行分析。对51 名被试在驾驶过程中的平均速度进行频数分布统计,结果如图9所示。

图9 平均速度频数分布图
由图9可知:被试在驾驶过程中的平均速度主要分布在39~51 km/h区间,占比约70%,对平均速度进行均值分析,其均值为44.29 km/h(最小为31.05 km/h,最大为57.56 km/h,SD为5.853)。结果表明,被试平均速度分布大致呈现正态分布,平均速度在45~48 km/h 区间的人数占比最多。随着驾驶速度的提高,驾驶人的车辆控制能力和车内外信息感知水平都有所下降,驾驶过程中的风险行为概率将会增高。因此,超速行为是反映驾驶过程中风险行为模式的主要指标,对被试在驾驶过程中的超速百分比进行频数分布统计,结果如图10所示。图中“40区域”是指限速40 km/h的区域;“60区域”含义类同。

图10 超速百分比频数分布图
由图10 可知:两种区域类型超速百分比的分布特征存在一定差异,40 区域主要集中分布在0~20%区间,占比53%;60 区域主要集中分布在0~20%区间,占比76%。对超速百分比进行均值分析,40 区域均值为26.32%(最小为0,最大为100%,SD 为0.244),60 区域均值为12.34%(最小为0,最大为71.28%,SD为0.147)。结果表明,被试在40区域表现出更高的超速行为,其均值是60 区域的两倍左右。除此之外,部分被试的超速比例过高,在40 区域中最高达到了100%,几乎在限速标识场景中全程超速,而在60 区域中也出现了最高71.28%的超速比例,这反映出很高的不安全行为和风险倾向。
在模拟驾驶过程中被试表现出不同的速度选择模式,除了速度选择外,被试对于车辆的控制能力也反映其驾驶行为模式,横向位置偏离标准差(standard deviation of lateral position,SDLP)是驾驶人行车稳定性的重要评价指标[20],其值越大则说明驾驶人车道保持能力越弱,即驾驶人较难按照理想的行驶轨迹进行稳定驾驶。本文中设计的弯道路段场景,除了考察被试的风险行为倾向,也评估被试对于车辆的横向控制能力,对被试在弯道路段驾驶过程中的SDLP进行频数分布统计,结果如图11所示。
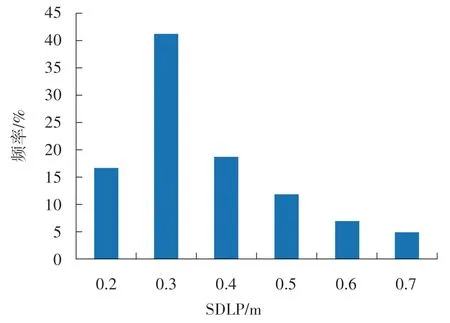
图11 SDLP频数分布图
由图11 可知:SDLP 主要 分布在0.2~0.5 m 区间,占比88%,对SDLP 进行均值分析,其均值为0.32 m(最 小为0.11 m,最大 为0.68 m,SD 为0.141)。结果表明,整体车辆横向控制能力较强,但是有约12%被试SDLP 大于0.5 m,其车辆控制能力低于平均水平,当车辆发生紧急情况时,驾驶人可能无法有效控制车辆使其运行在安全的行驶轨迹上,从而有可能会导致交通事故的发生。
对高低抑制控制组的速度选择行为进行差异性分析,结果见表5。
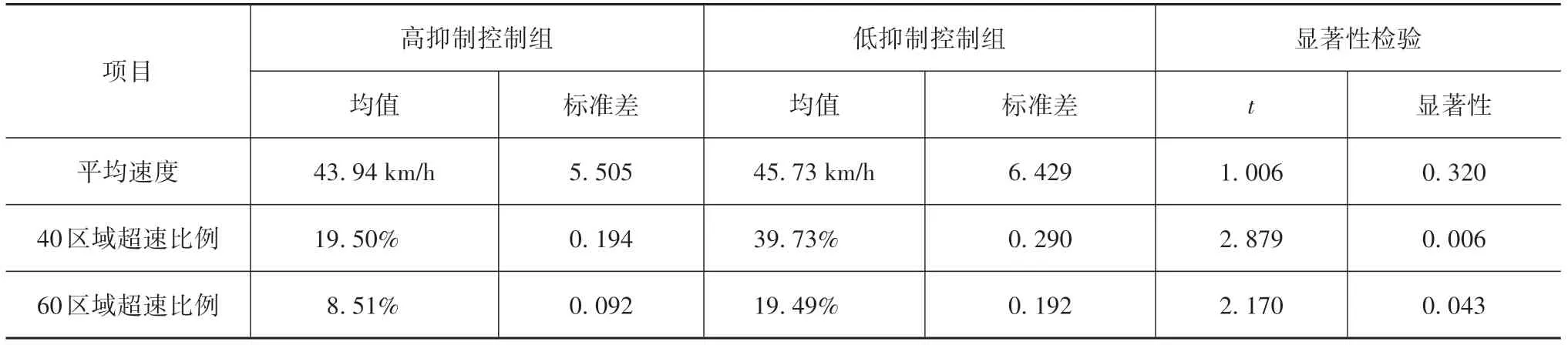
表5 速度选择行为差异性分析
由表5 可知:高抑制控制组在40 区域超速比例(t=2.879,p<0.05)和60 区域超速比例(t=2.170,p<0.05)均值方面与低抑制控制组存在显著性差异。结果表明,低抑制控制组在40区域和60区域的超速比例均值上是高抑制控制组的两倍左右,并且均值间具有统计学上的显著性差异,说明低抑制控制组具有更高的超速行为表现,有更高的风险行为倾向。
对高低抑制控制组的SDLP进行频数分布统计,结果如图12所示。
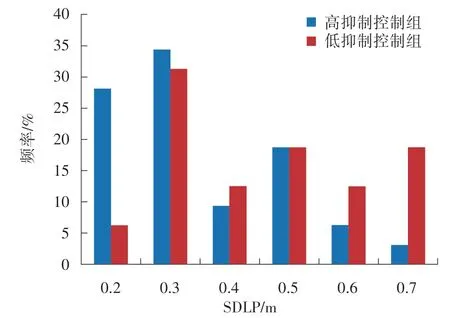
图12 高低抑制控制组SDLP频数分布图
由图12可知:高抑制控制组SDLP 在0.2~0.3 m区间的频次最高,占比34%;低抑制控制组SDLP 在0.3 m 附近的频次最高,在0.2~0.3 m 区间的占比31%。对SDLP 进行均值分析,高抑制控制组均值为0.29 m(最小 为0.11 m,最 大为0.62 m,SD 为0.138),低抑制控制组均值为0.42 m(最小为0.24 m,最大为0.68 m,SD为0.151)。结果表明,低抑制控制组相比于高抑制控制组,对于车辆的横向控制能力偏弱,结合风险行为倾向的分析,低抑制控制组往往具有更高的超速行为比例,导致发生紧急情况时,很可能无法有效控制车辆运行在安全的轨迹上,导致交通事故的发生。
4 抑制控制和风险驾驶行为相关分析
通过上节的分析,可知不同抑制控制能力的被试在风险驾驶行为上存在差异,但群体间的差异无法全面表现出抑制控制与风险驾驶行为间的直接关系,因此有必要对抑制控制与风险驾驶行为进行相关性分析。其客观指标相关分析结果见表6。

表6 行为客观指标相关性分析
由表6 可知:Go 刺激反应时与平均速度存在正相关关系(r=0.235),与40 区域超速比例存在负相关关系(r=-0.108),与SDLP 存在负相关关系(r=-0.144);NoGo 刺激误报率与表现得分存在负相关关系(r=-0.143),与风险决策比例存在正相关关系(r=0.181),与40 区域超速比例存在负相关关系(r=-0.135),与SDLP 存在负相关关系(r=-0.182)。结果表明,抑制控制与风险驾驶行为有关的行为客观指标间存在一定的相关关系,结合不同抑制控制能力被试的风险驾驶行为差异分析,可认为驾驶人抑制控制能力在一定程度上影响其风险驾驶倾向及其对应的驾驶行为模式。抑制控制能力相对较低的驾驶人具有更高的风险行为倾向,且具有驾驶过程中采取相对较高的车速、更高的超速行为比例和相对较弱的车辆横向控制能力等驾驶行为模式,容易在遇到紧急情况时失去对车辆控制,从而造成交通事故的发生。
5 结论
(1)在本文设计的风险决策情境中,驾驶人在无红绿灯和弯道路段类型中表现出更高的风险行为倾向。通过分析高、低抑制控制组在风险行为倾向上的差异性,可以认为抑制控制能力相对较低的驾驶人在面对风险决策情境时,往往会表现出更高的风险行为倾向。
(2)在模拟驾驶过程中不同抑制控制能力驾驶人表现出不同的速度选择模式,具体表现为其平均速度和超速比例的不同。风险行为倾向较高,即抑制控制能力相对较弱的驾驶人,在驾驶过程中倾向于采取更高的行驶速度,并且具有更高超速行为比例,对SDLP 的分析结果也表明,低抑制控制组对于车辆的横向控制能力比高抑制控制组弱。
(3)通过对抑制控制和风险驾驶行为客观指标的相关性分析,发现行为客观指标间存在一定的相关关系,结合不同抑制控制能力驾驶人风险驾驶行为的差异分析,可以认为驾驶人抑制控制能力在一定程度上影响其风险行为倾向及其对应的驾驶行为模式。
