一种新型的机器人分拣工件控制装置的设计
2021-05-11潘纹
潘 纹
(黄冈职业技术学院 机电学院,湖北 黄冈 438002)
目前在对工件分类时,大多采用的是人工分拣的方式,需要大量的分拣人员,存在工件丢失、差错率高、分拣效率低、无法适应多变的工作环境、占用场地面积较大、分拣员工情绪不佳、人为因素暴力损伤工件等问题[1],造成无法满足生活节奏和加快效率的更高要求,同时增加了分拣成本[2]。一些企业采用的专机分拣,具有适应性低、灵活性低等弊端,不能适用于多样工件的分拣。现有技术和系统的分拣工件装置首先需将工件整齐并有足够大的间距放置在料盘中,或者某种卡具中,不能随意地散乱放置。这导致系统中需要料盘,还需要人工将工件整齐地放置在料盘中,造成了生产成本增加,自动化程度降低。为解决现在市场上分拣工件的这些问题,需设计一种新型的结构简单、安装使用方便、提高工作效率的机器人分拣工件控制装置。机器人分拣技术是机器人技术和机器视觉技术的有机组合。
机器人分拣工件与传统的人工分拣工件相比较,具有安全、高效、准确等优点。使用机器人分拣自动化技术与设备,提供系统高效的解决方案,更加节能高效,还能提高分拣的效率和自动化水平。传统的人工分拣工件有自动化水平较低、能耗大、人工成本高、分拣差错率高等缺点。用机器人替代人工分拣工件,减轻了人工劳动强度,提高了分拣效率和精确度、降低了整体分拣成本,进一步提升了分拣的自动化水平,具有较高的现实意义和应用推广价值。
1 设计方案
新型的机器人分拣工件控制装置如图1 所示。
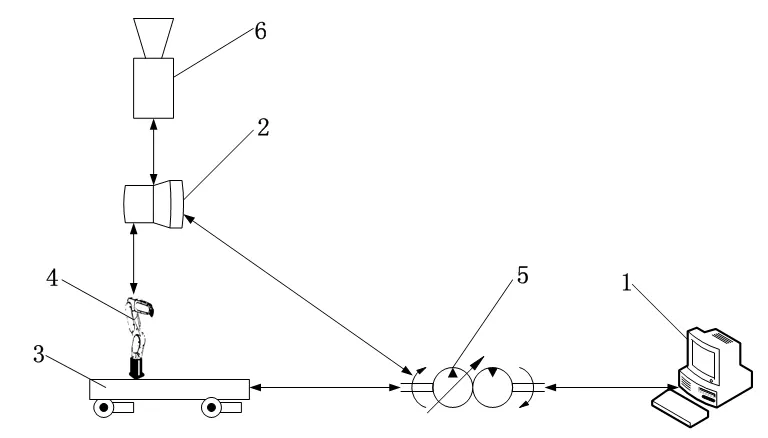
图1 机器人分拣工件控制装置示意图
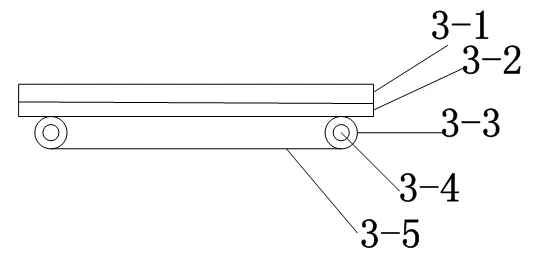
图2 行走装置示意图
行走装置如图2 所示。
计算机1 的输出端通过信号线与驱动器5 的输入端连接,计算机还与报警器连接。驱动器5的输出端通过信号线分别与行走装置3、分拣装置4 连接。视觉识别器2 由视觉传感器、超声波测距传感器和红外线传感器组成。视觉识别器2 的输入端通过信号线与摄像机6 连接,视觉识别器2的输出端通过信号线与分拣装置4 的输入端和行走装置3 的输入端连接。行走装置3 中的底盘夹层3-1 焊接在底盘基座3-2 上,行走轮3-3 通过螺栓固定在底盘基座3-2 的底部,直流电机3-4与行走轮3-3 轴连接,驱动履带3-5 环绕在行走轮3-3 上。分拣装置4 通过螺栓安装在行走装置3 上,分拣装置4 采用专利号为CN201420346733.6的一种机器人智能分拣工件的装置,机器人上设有抓取工件的手爪,手爪为二指平等手爪。
该机器人分拣工件控制装置通过设置视觉识别器,能够有效的将工件进行合理、高速的分配,且分拣过程中不会存在差误,准确率高,满足了生活节奏和加快效率更高的要求,同时降低了分拣成本。该新型技术方案确保了机器人安全稳定、连续可靠地自动完成工件抓取操作,使得整个机器人分拣系统具有更高的智能性、安全稳定性,扩大了机器人的应用范围和工作环境[3]。
2 工作原理
使用该机器人分拣工件控制装置时,首先通过摄像机6 对工件进行拍摄,同时摄像机6 将拍摄到的信息传递给视觉识别器2,视觉识别器2对工件进行识别,计算机1 控制驱动器5,驱动器5 带动行走装置3 和分拣装置4 工作,分拣装置4对工件进行分类与归纳,在行走装置3 的带动下,分拣装置4 再将工件放置到合理的位置上;接着,摄像机6 上的显示屏用于实时显示位置和工作状态;通过计算机1 与报警器的连接,当计算机1判断出机器人偏离控制路线时,将信号传递给报警器,报警器进行报警;视觉识别器2 由视觉传感器、超声波测距传感器和红外线传感器构成,能够自主识别工件的位置、形状和大小等信息;底盘基座3-2 用于安装分拣装置4 和驱动器5,底盘夹层3-1 用于安装计算机1,驱动履带3-5用于在直流电机3-4 的驱动下带动机器人移动,机器人分拣装置4 通过设置视觉识别器2 识别的图像中工件周边区域的灰度值与料盘的灰度值相同时,分拣装置4 中的控制器控制机器人手爪抓取料盘上的工件,视觉识别器识别的图像中工件的周边区域等于或者大于手爪的抓取部分的截面积。机器人分拣装置4 通过设置视觉识别器2 能够有效地将工件进行合理、高速的分配,且分拣过程中不会存在差误,准确率高,满足了生活节奏和加快效率更高的要求,同时降低了分拣成本[4]。
3 实施效果
使用该新型机器人分拣工件控制装置分拣工件效率明显提高,分拣工件时可以不受气候、时间、人的体力等因素的限制连续运行,同时分拣系统单位时间内分拣件数多,可较长时间地连续运行,每小时可分拣几千工件,是人工分拣效率的数倍。同时分拣准确率高,分拣系统在工作的时候可以存储数据,数据存储主要是确保工件分拣正确,保证分拣的工件不会丢失。人工分拣工件的时候,常常会出现分拣错误,或者是出现工件丢失的情况,导致分拣工作出现各种各样的问题。使用该机器人分拣工件,能提高工件分拣正确率和安全度。应用该机器人分拣工件控制装置,不仅节省了生产成本,还提高了生产效率,降低成本,减员增效自动化分拣为企业节约了许多劳动成本,帮助企业改进工作方式,让企业更方便、更高效地管理货物[5]。另外,人工的减少,企业在分拣工件人员管理上支出减少,可以将更多精力和资源投放到企业的正常管理运营等工作上,进一步提升企业的整体效益。
4 结语
人工分拣在一些小规模的工厂中仍然存在。近几年来,随着物流行业的飞速发展,传统的人工分拣已经满足不了当下的分拣需要,自动化分拣替代人工分拣是行业发展的必然趋势。自动分拣系统已广泛应用到电商等行业中,越来越多的行业和企业将逐步拥有自动分拣系统来实现高效分拣。目前自动分拣系统准确率基本能达到99.99%,远超人工分拣。 优化管理模式,降本增效的自动化分拣帮助企业减少了较高的人工劳动成本,而且企业可以更好地管控机械的分拣。
随着机器人群体的日益壮大和机器人技术的不断成熟,越来越多的企业生产线在焊接、喷涂、搬运、码垛、装配等应用中广泛地使用到了机器人。本文的机器人分拣工件控制装置就是典型的搬运应用。机器人应用技术日益成熟,而机器人生产成本不断下降,因此,机器人逐渐取代了传统的人工劳动。