基于多传感器集成的地铁限界及轨道几何状态检测应用研究
2021-05-11陈伟李东柏刘耀强朱志辉
陈伟,李东柏,刘耀强,朱志辉, 3
基于多传感器集成的地铁限界及轨道几何状态检测应用研究
陈伟1,李东柏1,刘耀强2,朱志辉1, 3
(1. 中南大学 土木工程学院,湖南 长沙 410075;2. 中铁一局集团 新运工程有限公司,陕西 咸阳 712000;3. 中南大学 高速铁路建造技术国家工程实验室,湖南 长沙 410075)
对地铁限界及轨道几何状态进行检测是地铁运营维护的重要工作,采用人工检测既费时又费力,运用大型轨检车的费用太高。为了便携快捷地检测地铁限界及轨道几何状态,基于多传感器集成开发一种便携检测装置,进行检测应用研究。通过将激光扫描仪、轨距传感器、里程计和倾角仪等传感器集成到轨检小车上,设计配套的软件系统,构造了限界检测、轨距计算、超高计算、坐标系转换和里程计标定等板块。应用该便携装置对长沙地铁三号线侯家塘站至四方坪站进行检测,分析和验证了检测结果,检测装置最终实现了超限报警、图形及超限数据自动录入、轨枕自动识别及轨道几何尺寸数据自动采集等多项功能。
地铁限界;轨道几何状态;检测装置;激光扫描仪;轨距传感器
在地铁的运营维护工作中,对于限界侵限情况的排查和轨道几何状态的检测是两项重要的工作[1−3]。国外对隧道形变检测技术的研究较早,从最开始的接触式检测法逐步发展到非接触式检测法。瑞士安伯格公司在传统轨检小车的基础上开发了装有PROFILER100断面仪的GRP3000和装有Leica HDS4500三维激光扫描仪的GRP5000轨检车,GRP系列的轨检小车使用倾角传感器获取车体姿态信息,通过棱镜获取车体在绝对坐标,能够得到在绝对坐标系下的点云坐标[4]。史增峰[5]将9个激光测距仪装在隧道检测车上,并且使用了倾角传感器、高精度旋转台、光电编码器、plc控制器和无线通信器,对隧道动态断面测量进行了探索。熊仕勇等[6]提出一种基于激光摄像检测的轨距计算新算法。我国地铁运营维护面临着很多困难和限制,比如天窗时间短,供轨道检查和维护的时间有限;检测的作业环境比较恶劣;采用人工作业,既费时又费力[7],而采用大型轨检车成本较高。因此,本团队联合中铁一局集团新运工程有限公司开发了便携式地铁限界及轨道几何状态检测装置,应用于长沙地铁3号线,如图1所示。本文将介绍该装置的研发情况、相关设计与计算原理,以及该装置的应用情况。
1 装置原理
检测装置由T型轨检小车、车架、激光扫描仪、里程计、角度传感器、轨距传感器、单片机芯片等装置组成。如图1所示,其中激光扫描仪采用的是德国 SICK 公司生产的二维激光断面仪,型号为LMS111−10100,里程计通过接触式开关传感器与可编程单片机结合的方式构建,单片机采用意法半导体(ST Micro Electronics, ST)公司生产的STM32F103RB型芯片,角度传感器采用上海航海仪器厂生产定制的超高精度传感器,轨距传感器采用意大利公司G系列GH型MTS电阻式位移传 感器。

图1 便携式地铁限界及轨道几何状态检测装置
1.1 软件系统设计思路
软件系统的设计是决定整个系统是否能满足预期目标的关键。检测装置是一个实时检测系统,输入的数据是从装置及其软件系统得来的,输出的数据是控制显示器等外部硬件的数据。
检测装置在Visual Studio 2005平台使用C++开发了相应的数据采集与处理程序,进行数据库的设计、传感器的数据文件格式的设计。该装置的整套标定参数、特征点坐标、轨道平竖曲线数据都保存在一个数据库中,作为检测项目所需的全部参数,采用C++数据结构体的方式定义配置参数或测量数据。
检测装置具有多个传感器,不同的传感器传输的数据结构有所不同。激光扫描仪采集的原始数据是包含距离观测值、扫描仪角度和回波强度信息的十六进制文件,所以需要通过解码计算才能得到激光扫描仪在坐标系下的坐标。断面数据用于限界检测与断面收敛分析。里程计的数据文件格式比较简单,一行对应2个数据,分别为数据接收时系统时间和里程值。轨距传感器通过单片机与工控机进行连接,通过工控机发送命令读取轨距传感器测量数据。程序结构如图2所示。
1.2 限界检测
在地铁运营阶段的检测中,主要针对车辆限界进行检测,车辆限界检测的主要目的是保证隧道中没有设备侵入到车辆的轮廓线内,保证地铁车辆的运行安全。限界轮廓是由多个特征点构成的,各点坐标值均是以轨面坐标系进行设计的。长沙地铁3号线运行的B2型车辆的限界轮廓如图3所示,图3中用数字或字母表示的点在车辆轮廓线、车辆限界和设备限界上,这些点的坐标值按照《地铁设计规范 GB50157—2013》的规定选取。
生成的断面点云成果为各时刻车体坐标系下的坐标,需要转换到轨面坐标系才能进行限界检测,轨道的模型如图4所示。小车左轮底车体坐标为(−0.555,−0.072,−0.2) m,轨道高程基准为1 500 mm,设计轨距为1 435 mm。经过平移与旋转,就可得到轨面坐标系下断面点云数据[8]。
判断某个断面数据是否存在侵限,相当于判断此断面中是否有扫描点位于限界标准轮廓内。采用射线判别法,根据该点的水平线和多边形的交点个数来判断,如果交点数为奇数,则该点位于多边形内,如果为偶数,则点位于多边形外[9]。如图5所示,点出发的直线与多边形有1个交点,位于多边形内,点出发的直线有2个交点,位于多边 形外。
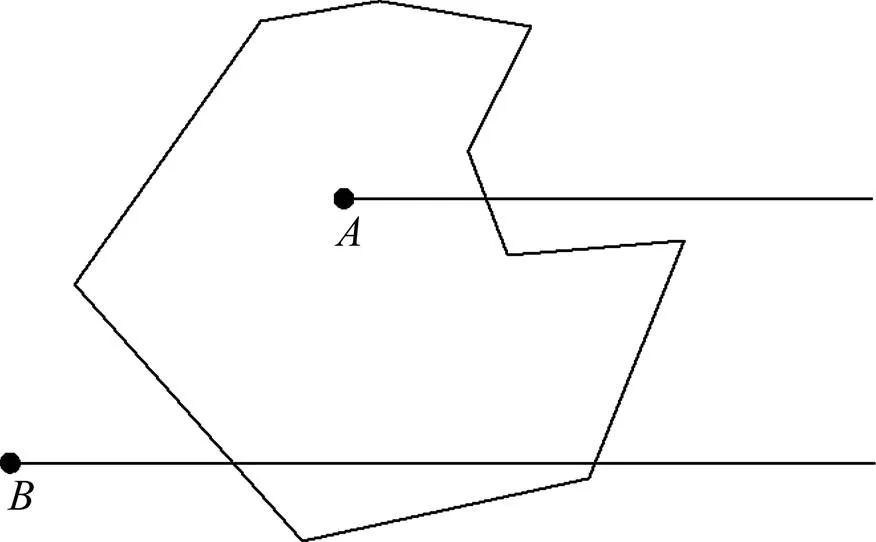
图5 射线判别法示意图
利用C++中Region类的IsVisible方法实现上述射线法检测算法,能够完成点是否在限界轮廓内的判断,实现侵限检测功能。如图6(a)中,内圈为精确的车辆限界轮廓,外圈曲线为当前里程对应的轨面坐标系下地铁构筑物轮廓的坐标,可以看出断面点均在内圈轮廓外,侵限情况不存在。当断面点云发生侵限情况时,系统会进行警告提醒并记录侵限里程,可以对现场调整进行指导,如图6(b)所示。如果不存在侵限情况,依次判断轨面原点到断面点云的线段1与限界相邻轮廓点组成的线段2是否相交,若相交则继续求出交点,并求出距离差,对所有距离差进行排序,求得距离差最小的点,并且在界面上用箭头指出,则该点为距限界最近点,较容易侵限,效果如图6(c)所示,其中上方突出部分为电线,属于较容易侵限的部位,其距限界的距离为0.086 m。
1.3 轨距计算
检测装置的轨距传感器能够对轨距进行检测,可以输出具有里程信息的轨距数据,可得出对应里程下的轨距曲线。在里程0~48 m的试验段对轨距进行3次检测,结果如图7(a)所示。由于数据量较大且不易统计误差,按照0.25 m的间隔进行3次样条插值处理,得到更直观的轨距曲线,如图7(b)所示。对相同里程处的轨距进行统计,以第一套数据为基准作差,得到差值绝对值的平均值为0.14 mm,最大值为0.3 mm,最小值为0 mm,均符合规范要求,因此该装置能够满足轨距检测的需求,可以根据轨距成果指导现场轨道精调作业。

(a)限界检测示例;(b) 侵限情况示意图;(c) 最近点检测
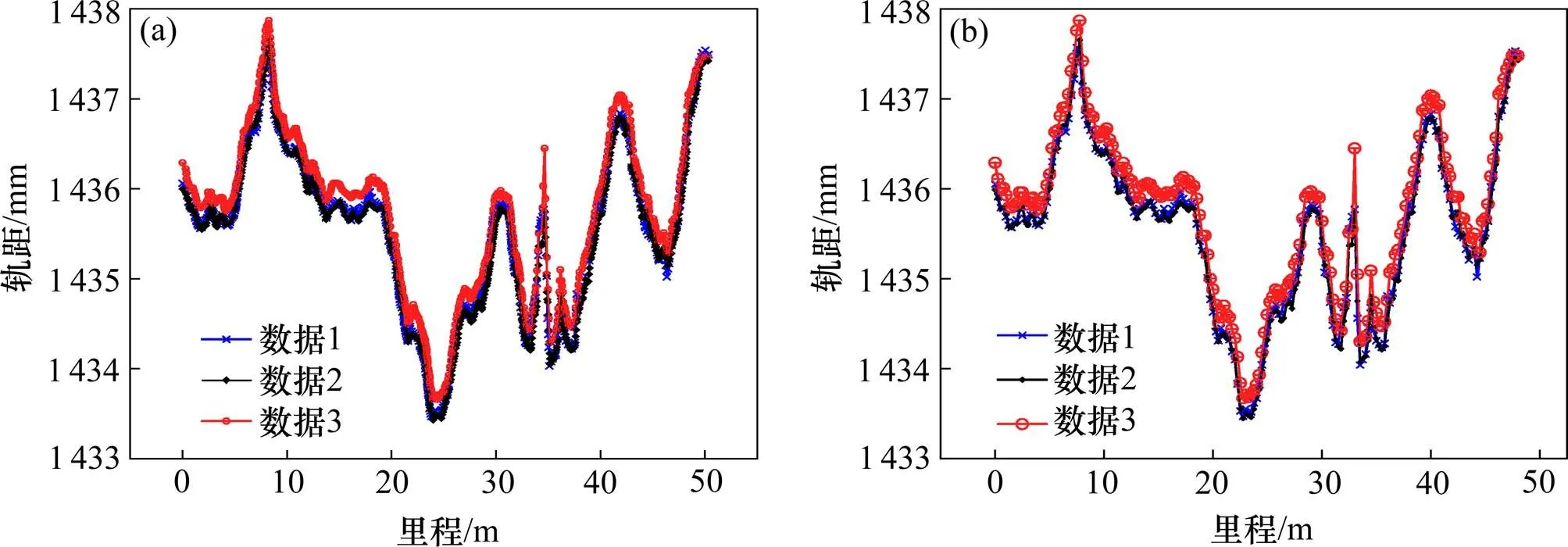
(a) 三次轨距曲线;(b) 三次轨距插值曲线
1.4 超高计算
检测装置能够对超高进行测量。在装置底部安装倾角传感器,其与横梁底部平行,通过对该装置的纵向倾角和横向倾角的测量,再结合两轨顶面中心点之间的距离可以求出轨道的超高值。超高值=×sin1,其中为实测轨距值与一个钢轨内外侧固定宽度的和值,1为装置的横向倾角[10],如图4所示。
沿线路的前进方向,将左转曲线设为负,将右转曲线设为正,再将得到的轨道实测值与设计值进行比较,判断超高精度是否符合规范。
1.5 系统坐标转换方法
检测装置系统的本质是多传感器的融合,为了在空间上融合系统传感器测量的数据,需要对各个传感器之间的相对位置关系进行标定,将各个传感器的测量结果统一到车体坐标系,实现空间上的集成[11−12]。
1) 坐标系统
在本系统中涉及以下5种坐标系,分别为扫描仪坐标系C,车体坐标系C,全站仪坐标系C,工程坐标系C,轨面坐标系C,坐标系如图8 所示。
2) 坐标系转换
检测装置检测时产生的车体振动会造成相对轨面的5个自由度的不确定性,分别为沿着3个坐标轴产生的偏移量和绕3个坐标轴的旋转量即俯仰角、偏航角和侧滚角[13]。坐标系的转化关系为:
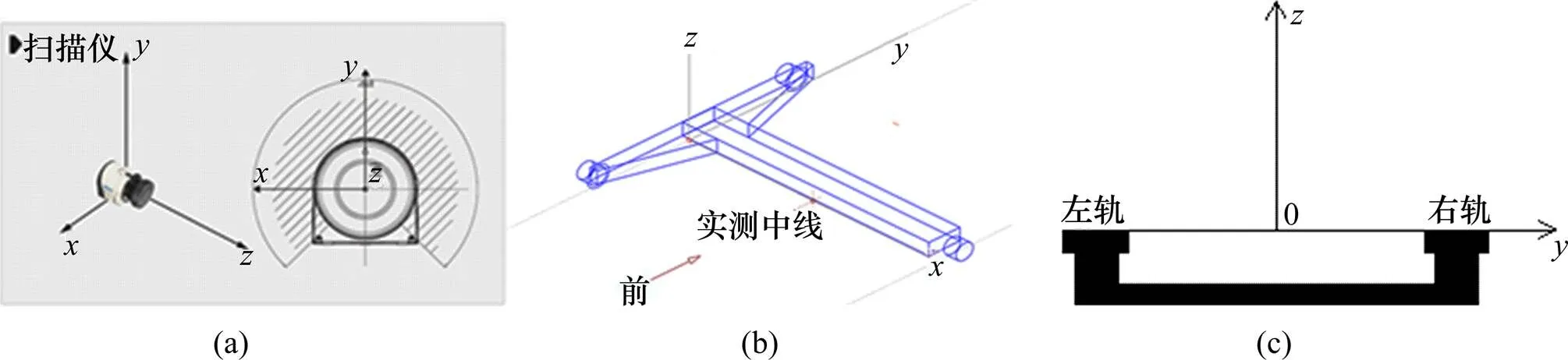
(a) 扫描仪坐标系;(b) 车体坐标系;(c) 轨面坐标系


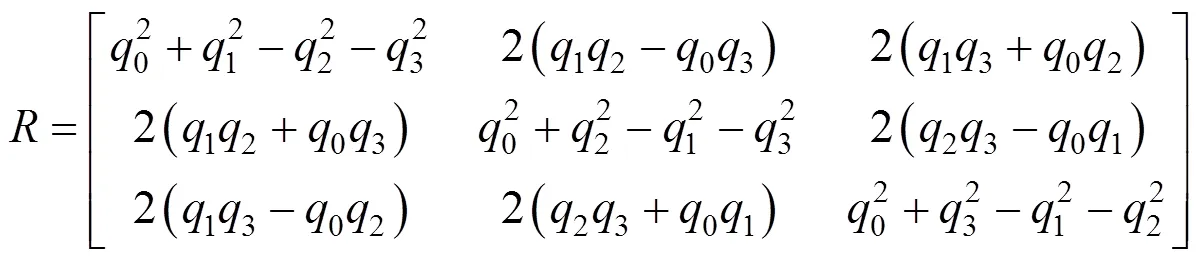
由于装置运动而产生坐标对轨面的3个自由度俯仰角、偏航角和侧滚角可由上面公式可推导 出来:

可得:
1.6 里程计标定
检测装置采用的里程计为一对经过二次集成开发的接近开关传感器,在已知左轮设计半径5 cm的情况下,根据里程计记录的角度反映轮子滚过的周长,作为小车前进的里程。但是在实际应用中,由于里程计本身的误差、小车震动、轮子磨损、钢轨接缝等原因[14],往往无法得到准确的里程,需要一个较为准确的里程参考,将里程计尽可能的标定准确。
现场架设徕卡全站仪,经过自由设站后,用花杆棱镜分别放在之前做好的标记处,用全站仪测量实际坐标,通过线性计算软件,解算出里程,进一步算出两点位置的里程差,即小车行走的真实距离。测量时尽量将小车安置在直线段的某一根轨枕处,使用全站仪测量标志坐标,与里程计测量的结果进行比较。
按照上述实验流程分别测量得到75组拉车数据与140组推车数据,对这2种数据分别结合全站仪数据进行计算,得到里程计数据改正倍数:KK=全站仪数据/里程计数据。通过图9(a)可以发现里程计在前进与后退时对里程的测量分别呈现2种不同的修正倍数,且推车时里程计表现比较稳定,这与推车时车体震动较小的实际情况也是相吻合的。分别对推车与拉车的修正倍数求平均值,可以得到车体前进时的修正倍数为 0.999 328,车体后退时的修正倍数为1.010 194。采用新的修正倍数对小车里程计测量得到的里程进行修正,重新采集一组数据,将采用修正参数与不采用修正参数的数据进行对比,可以得到图9(b)。可以看出,使用上述标定参数进行修正后,里程计在5 m内可以达到5 mm以内的精度,在15 m内仍然可以达到1 cm内的精度,而未经标定的里程计只能在5 m内达到1 cm内的精度。因此,采用上述里程计标定方法进行标定后,里程计可以在一定里程范围内达到所需的精度。
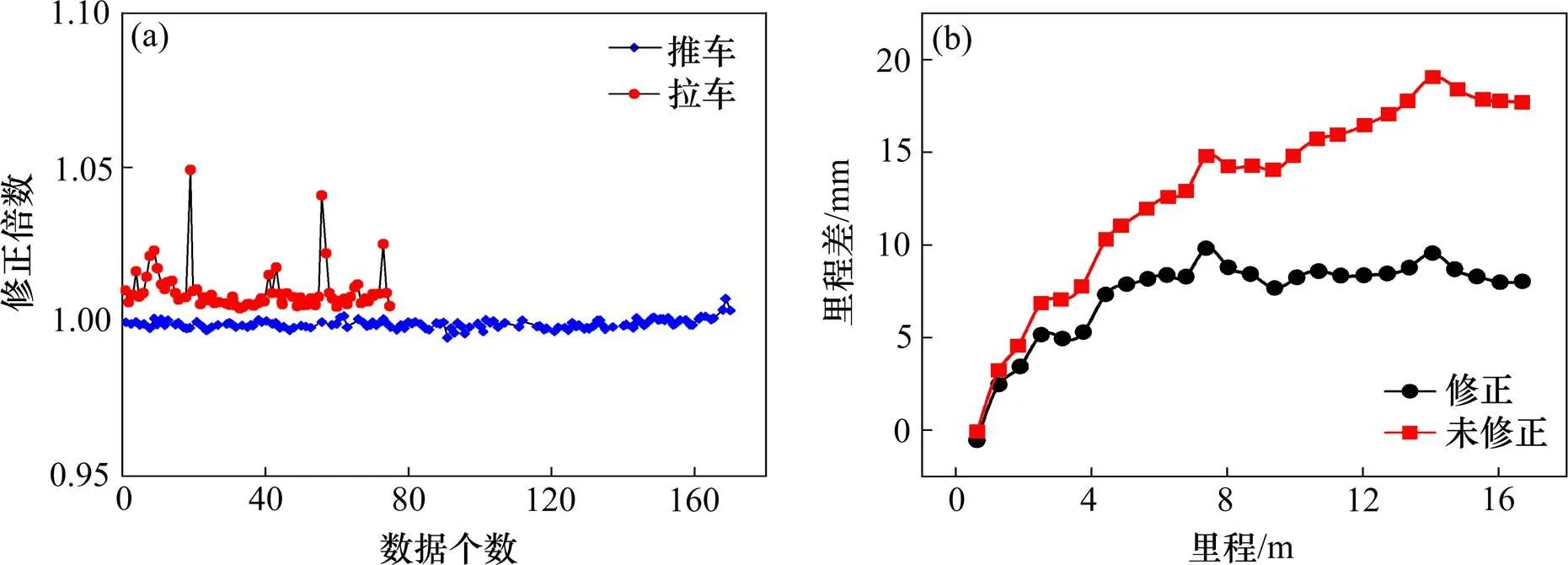
(a) 里程计修正倍数;(b) 里程计修正结果
1.7 轨距传感器标定
为了验证轨距传感器获取的轨距的静态稳定性与重复性以及绝对精度,进行了静态稳定性测试和DGJC型轨检尺测量对比测试。
1.7.1 静态稳定性测试
测量过程中,将检测装置安置到轨道上,然后分别设置频率为1,10和50 Hz采集轨距数据,并统计所获取的轨距的标准差与极差,结果如表1 所示。

表1 静态重复测量结果
从表1可以看出,装置的轨距标准差在 0.01 mm 之下,重复测量极差在0.13 mm 之下,根据《客运专线轨道几何状态测量仪暂行技术条件》(科技基[2008]86号)规定,轨距测量重复性的示值范围是±0.15 mm,满足要求,可以进行轨距检测。
1.7.2 轨距加常数计算
由于位移传感器测量的轨距是位移传感器的相对位移,因此实际轨距是在此相对值基础上加上一个轨距加常数,作为轨距测量补偿值,这个常数可以通过与轨检尺的对比中获得。使用 DGJC 型轨检尺与轨检小车测量轨道某一区段 15 根轨枕,计算轨检尺与轨距传感器测量的轨距偏差。原始轨距和轨检尺轨距如图10所示,经过检校,由原始轨距和轨检尺轨距计算出位移传感器的轨距测量加常数为−101.798 mm,位移传感器与轨检尺轨距示值误差平均值为0.073 mm,最大值为0.23 mm。《标准轨距铁路轨距尺》所要求的轨距允许的最大误差是0.25 mm,轨距示值误差满足要求。经过此加常数矫正,位移传感器可以实现轨距检测功能。
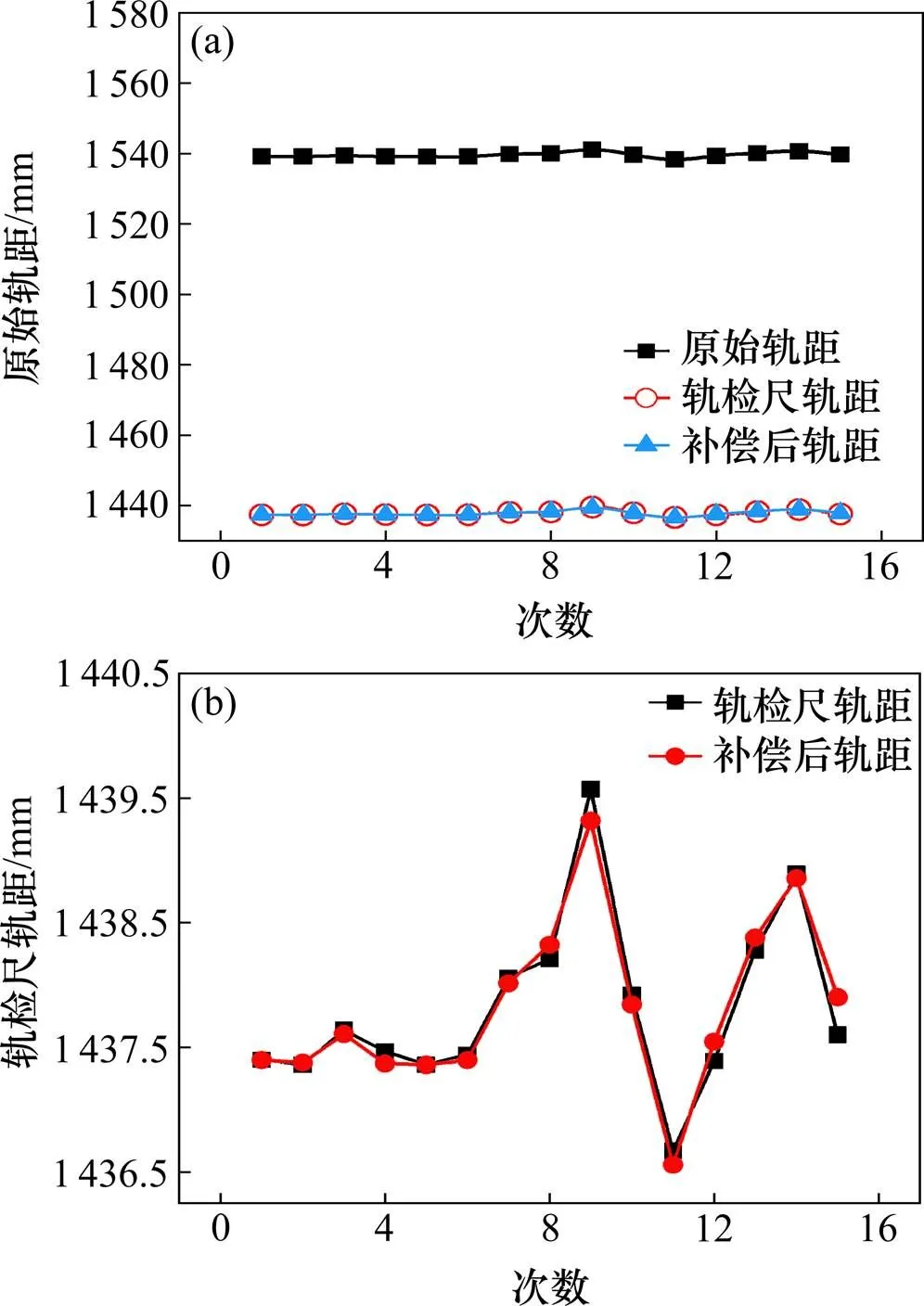
(a)原始轨距和轨检尺轨距;(b) 轨检尺轨距和补偿后轨距
2 应用情况
在长沙地铁3号线(侯家塘站至四方坪站,共9站8区间,均为地下线,整体道床18.814 km,里程范围DK18+430−DK27+641,单开道岔12组)进行了试验。
使用便携式地铁限界及轨道几何状态检测装置对长沙地体3号线侯家塘左线的部分轨距和超高值数据进行采集,并使用万能道尺对相同地段的部分轨距和超高值数据进行采集,结果如图11所示。通过检测装置测量和万能道尺测量的轨距最大相差0.4 mm,超高最大相差0.5 mm,通过对比验证,检测装置精度很高,能够快速准确地采集轨道几何状态信息。侯家塘站—四方坪站右线站台板实际测量结果如图12所示,实测值小于设计值的部分存在侵限情况,可以看出站台板侵限情况普遍存在,在朝阳村站最为突出,其中侵限最大值位于朝阳村站站台板施工模板处,达到135 mm。站台板侵限的主要原因在于施工时没有注意站台板边缘平面位置,站台板侵限对安全运营存在潜在威胁,需要结合检测仪器对部分侵限位置进行维修整理。线路的轨距和超高测量结果如图13所示,里程K19+ 585.896−K19+640.564的轨距出现了一定的波动,最大轨距达到1.441 3 m,最小轨距为1.429 3 m,该段属于直线地段,这种异常情况是由轨缝引起的[15]。超高最大值为0.120 3 m,位于缓和曲线地段,属于正常的曲线超高。
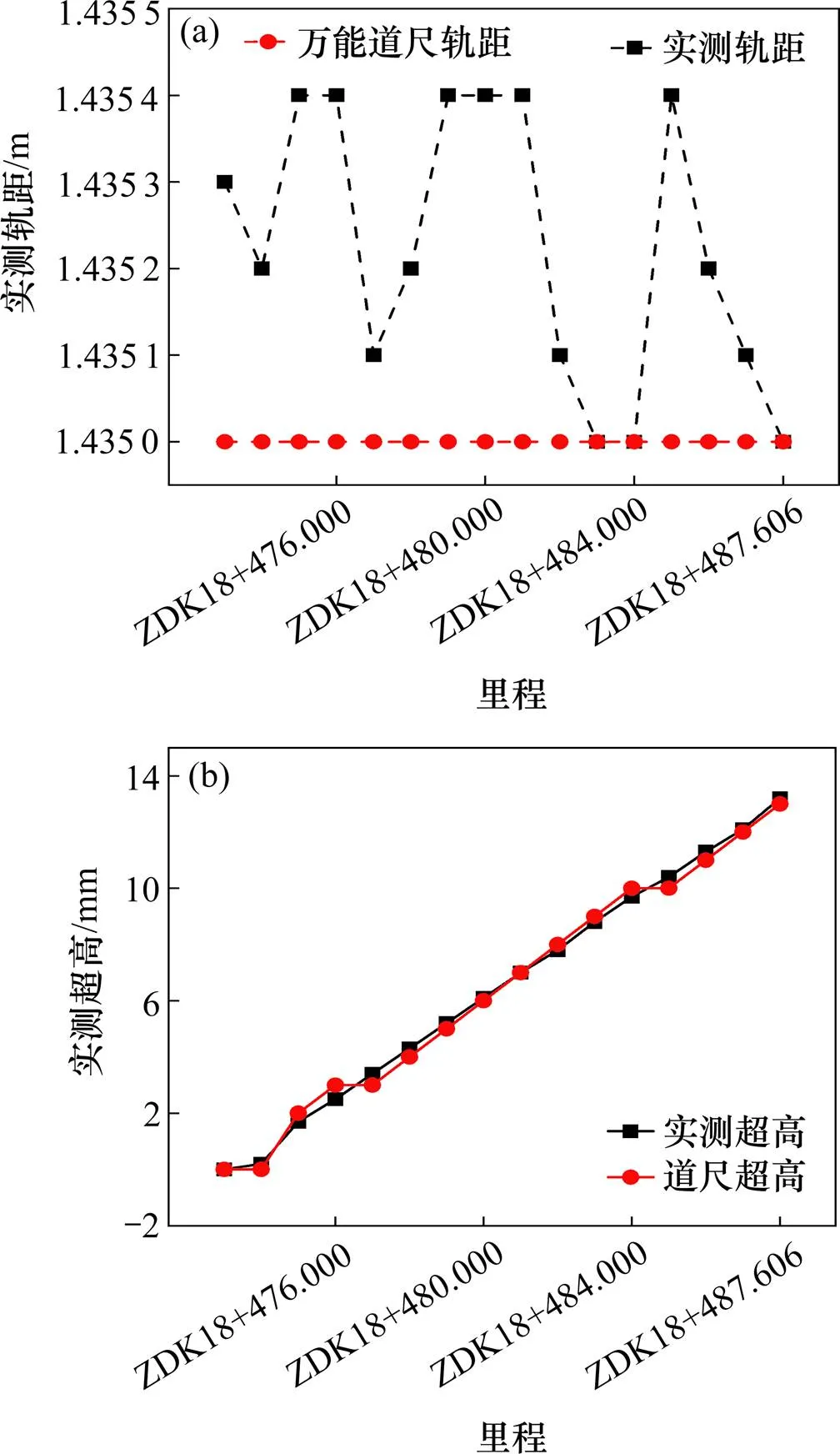
(a) 轨距测量结果;(b) 超高测量结果
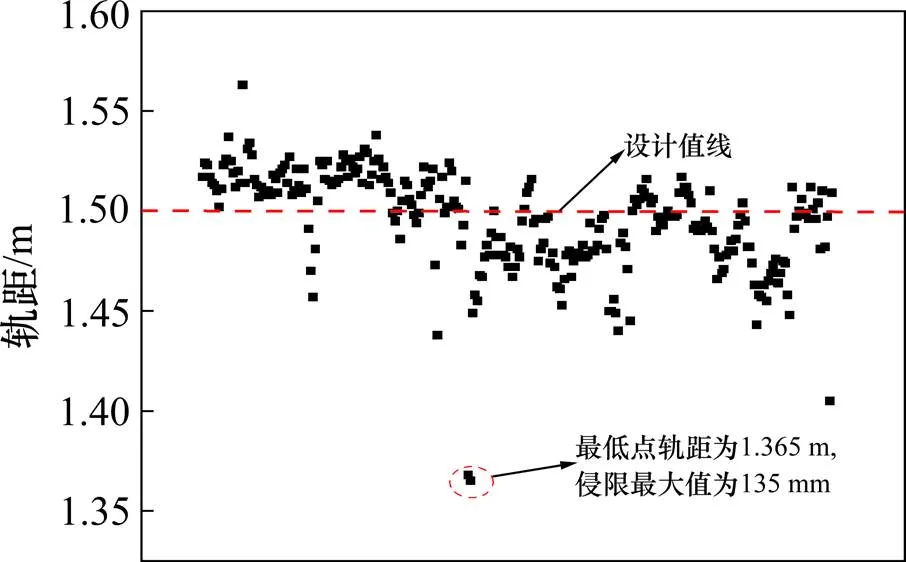
图12 侯家塘站−四方坪站右线实际测量结果
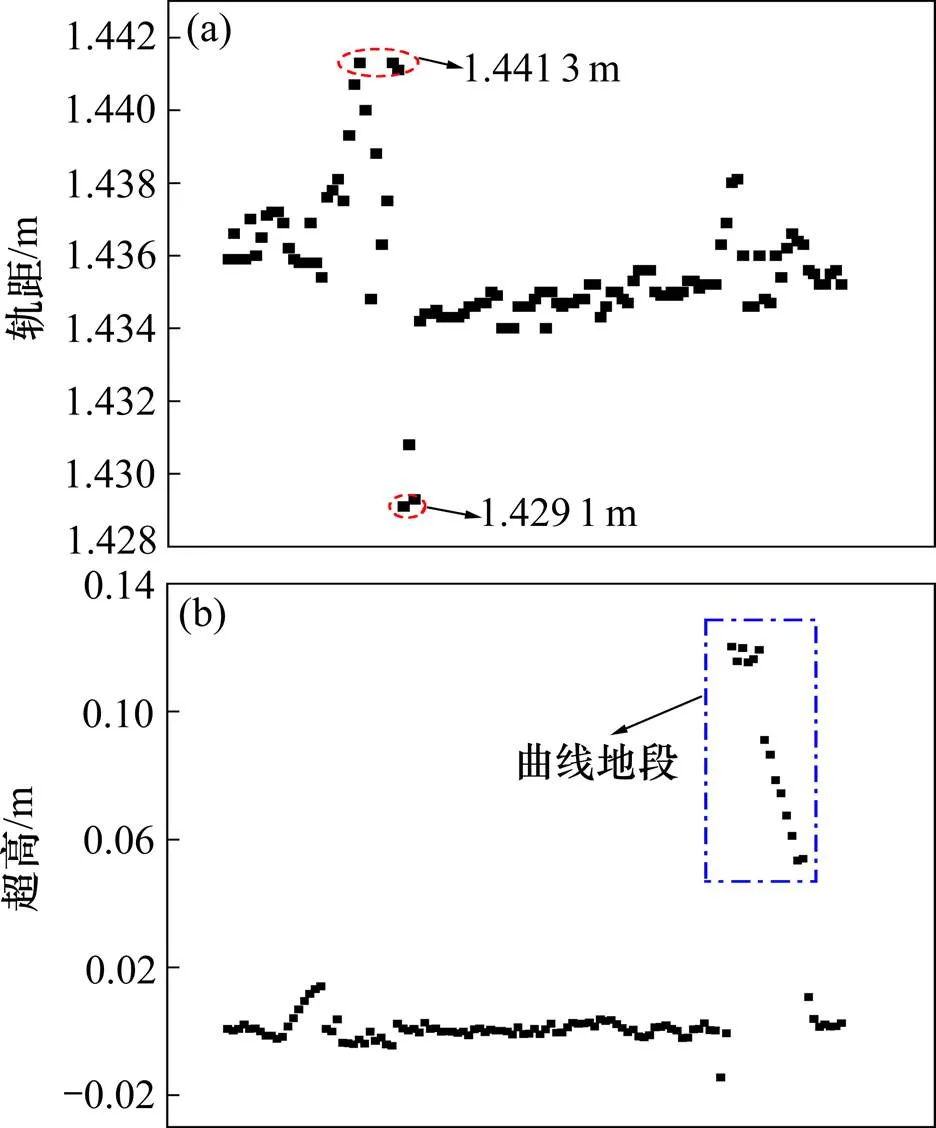
(a) 轨距数据;(b) 超高数据
3 结论
1) 研制了基于多传感器集成的便携检测装置,实现超限报警、图形及超限数据自动录入、轨枕自动识别及轨道几何尺寸数据自动采集等多项功能,做到了可见即可测,数据更新快,信息表达完整,且同步反馈,为地铁运营的安全、高效、经济、环保提供技术支持。
2) 激光扫描仪的使用改变了传统的限界检测方式,并极大地简化了检测操作步骤,减少人工操作的误差;检测装置通过轨距传感器、里程计和软件系统能够测量每根轨枕处的轨道几何尺寸数据,并能做到自动判断和记录限界测量数据,解决了人工检测轨道时不能连续动态测量的难题,实现了市场上轨检设备的技术突破。
3) 基于多传感器集成的地铁限界及轨道几何状态检测装置尚有升级的空间,系统软硬件预留了功能扩展设计板块,即轨道平顺性及舒适度检测系统,未来可以实现对轨道伤损的检测,比如检测钢轨表面磨耗及波磨等。
[1] 刘儒宏, 刘成龙, 何金学, 等. 惯导型轨检仪轨道测量精度检测方法研讨[J]. 测绘通报, 2020(4): 76−80. LIU Ruhong, LIU Chenglong, HE Jinxue, et al. Discussion on detection method of the measurement accuracy about inertial navigation track detector[J]. Bulletin of Surveying and Mapping, 2020(4):76−80.
[2] 李甍, 于龙, 张冬凯. 基于激光摄像技术的设备限界检测与图像融合拼接[J]. 铁道科学与工程学报, 2015, 12(6): 1485−1492. LI Meng, YU Long, ZHANG Dongkai. Metro equipment gauge detection and image fusion and splicing based on laser video camera technique[J]. Journal of Railway Science and Engineering, 2015, 12(6): 1485−1492.
[3] YAO Lianbi, SUN Haili, WANG Xuan, et al. Detection of track static regularities based on a laser tracker[J]. Journal of Surveying Engineering, 2017, 143(2): 1−13.
[4] 李寅. 路轨两栖综合检测车精确定位与综合同步系统研究[D]. 北京: 北京交通大学, 2011. LI Yin. Research on accurate positioning and comprehensive synchronization system of road and rail amphibious comprehensive detection vehicle[D]. Beijing: Beijing Jiaotong University, 2011.
[5] 史增峰. 基于移动激光扫描技术的隧道限界检测研究[D]. 上海: 上海工程技术大学, 2016. SHI Zengfeng. Research on tunnel limit detection based on mobile laser scanning technology[D]. Shanghai: Shanghai University of Engineering Science, 2016.
[6] 熊仕勇, 陈春俊, 王锋, 等. 一种新的轨距动态检测方法研究[J]. 铁道科学与工程学报, 2018, 15(7): 1825− 1831. XIONG Shiyong, CHEN Chunjun, WANG Feng, et al. A new method for dynamic measurement of track gauge[J]. Journal of Railway Science and Engineering, 2018, 15(7): 1825−1831.
[7] 李甍, 于龙, 张冬凯. 地铁设备限界随机因素分析[J].铁道科学与工程学报, 2015, 12(3): 657−662. LI Meng, YU Long, ZHANG Dongkai. An analysis of metro equipment gauge random factors[J]. Journal of Railway Science and Engineering, 2015, 12(3): 657−662.
[8] YAO L, SUN H, ZHOU Y, et al. Detection of high speed railway track static regularity with laser trackers[J]. Empire Survey Review, 2015, 47(343): 279−285.
[9] Hormann Kai, Agathos Alexander. The point in polygon problem for arbitrary polygons[J]. Computational Geometry, 2001, 20(3): 131−144.
[10] 洪思敏. 轨道检测小车测量方法的研究[D]. 广州: 广东工业大学, 2015. HONG Simin. Research on measurement method of track detection vehicle[D]. Guangzhou: Guangdong University of Technology, 2015.
[11] 潘国荣, 周跃寅. 两种坐标系转换计算方法的比较[J].大地测量与地球动力学, 2011, 31(3): 58−62. PAN Guorong, ZHOU Yueyin. Comparison of two coordinate system conversion calculation methods[J]. Geodesy and Geodynamics, 2011, 31(3): 58−62.
[12] LI Qingquan, CHEN Zhipeng, HU Qingwu, et al. Laser-aided INS and odometer navigation system for subway track irregularity measurement[J]. Journal of Surveying Engineering, 2017, 143(4): 04017014.1− 04017014.9.
[13] 何思婷. 轨道智能巡检小车动态基准测量系统[D]. 北京: 北京交通大学, 2019. HE Siting. Dynamic reference measurement system of track intelligent inspection vehicle[D]. Beijing: Beijing Jiaotong University, 2019.
[14] YAO L, ZHANG S, WANG Z, et al. Metro gauge inspection system based on mobile laser scanning technology[J]. Survey Review-Directorate of Overseas Surveys, 2020, 52(375): 531−543.
[15] 侯迎团, 杨卫平, 章一洲. 基于Chauvenet准则的轨距异常值在线处理[J]. 测控技术, 2016, 35(6): 56−59. HOU Yingtuan, YANG Weiping, ZHANG Yizhou. Online processing of gauge outliers based on Chauvenet criterion[J]. Measurement and Control Technology, 2016, 35(6): 56−59.
Application of metro gauge and track geometry detection based on multi-sensor integration
CHEN Wei1, LI Dongbai1, LIU Yaoqiang2, ZHU Zhihui1, 3
(1. School of Civil Engineering, Central South University, Changsha 410075, China; 2. Xinyun Engineering Co., Ltd., of China Railway First Group Co., Ltd., Xianyang 712000, China;3. National Engineering Laboratory for High-Speed Railway Construction, Central South University, Changsha 410075, China)
The detection of metro gauge and track geometry is an important work of metro operation and maintenance. Manual inspection is time-consuming and laborious, and the cost of using large-scale rail inspection vehicle is too high. Therefore, in order to detect the subway gauge and track geometry state conveniently and quickly, a portable detection device based on multi-sensor integration was developed, and the detection application research was carried out. The laser scanner, gauge sensor, odometer and inclinometer were integrated into the track inspection trolley, and the software system was designed. The function blocks of gauge detection, track gauge calculation, super elevation calculation, coordinate system conversion and odometer calibration were realized. The portable device was applied to detect Houjiatang station to Sifangping station of Changsha Metro Line 3, and the detection results were analyzed and verified. Finally, the detection device realizes the functions of gauge intrusion alarm, automatic input of graphics and gauge intrusion data, automatic identification of sleepers and automatic collection of track geometry data.
metro gauge; track geometry; detection device; laser scanner; gauge sensor
10.19713/j.cnki.43−1423/u.T20201099
U216.3;U231.1
A
1672 − 7029(2021)04 − 1025 − 10
2020−11−17
国家自然科学基金资助项目(52078498);湖南省教育厅创新平台开放基金项目(19K100);新运工程有限公司科技开发计划课题(201736)
陈伟(1985−),男,湖南益阳人,副教授,博士,从事轨道结构损伤、断裂损伤力学研究;E−mail:chenwei.csu@foxmail.com

(编辑 蒋学东)
