逆滤波器设计中若干基本问题的探讨*
2021-05-08曲万春何国荣梅铁民
曲万春,何国荣,梅铁民
(沈阳理工大学,辽宁 沈阳 110159)
0 引言
在很多信号处理应用中,如信道均衡、语音去混响[1-2]、能谱检测[3]、轨道不平顺检测信号处理等[4],都需要求解已知线性系统的逆系统,即逆滤波器设计。逆滤波器设计方法有很多,如最小均方误差[5-7]、复倒谱法[8]、基于LMS或卡尔曼滤波的算法等[9],其中最简单也最常用的方法是最小均方误差设计方法。最小均方误差法设计的逆系统与原系统的级联在均方误差最小化意义下逼近一个纯时延全通系统。
在最小均方误差逆滤波器设计中,一个经常被忽视的问题是原、逆滤波器级联系统所逼近的全通系统的时延问题(或群延迟问题)[6]。级联系统的时延大小取决于原系统的相位特性。最小均方误差逆滤波器设计包括单输入-单输出系统(Single Input Single Output,SISO)、单输入-多输出(Single Input Multiple Output,SIMO)系统和多输入-多输出(Multiple Input Multiple Output,MIMO)系统的逆系统设计。本文中只讨论前两种情况。
1 SISO系统的逆系统设计
设单信道系统的输入输出关系为:
式中,s(n)和x(n)分别为系统的输入、输出信号;c(n)(n=0,1,2,…,Lc-1)为系统的单位取样响应。
式(1)的z域表示为:



在最小均方误差意义下使g逼近理想系统ql:

式中,ql=[0,0,…,1(第l个分量),0,…,0]T是Lg×1维列矢量,代表一个纯时延的理想全局响应。
式(8)的最小均方解为:
式中,列矢Cl=CTql是卷积矩阵C的第l行的转置。

最小均方误差值为:

如上所述,SISO系统只能得到最小均方误差意义下的最优逆滤波器,不可能得到完全解卷积的逆滤波器,但SIMO系统可以得到完全解卷积逆系统。
2 SIMO逆系统设计
SIMO系统与SISO系统相比,具有本质上的不同,有完全解卷积的有限冲激响应逆系统。SIMO系统的输入输出关系为:

式中,i=1,2,…,N,xi(n)和ci(n)分别是第i路信道的输出信号(观测信号)和单位取样响应;s(n)是系统的输入信号。在N路信道冲激响应ci(k)已知且各个信道间没有公共零点的情况下,多路解卷积系统由MINT定理给出[5-6]。
令N路解卷积滤波器为hi(n)(i=1,2,…,N;n=0,1,…,Lh),则解卷积信号为:

式中,全局响应g(k)可表示为:


则SIMO解卷积问题等价于如下的优化问题:


当Lc、N不同值时,由得到的Lh值不一定是整数。如果Lh取大于的整数,则Lg

方法描述如下:设N路解卷积滤波器的长度分别为Lh1,Lh2,…,LhN,不失一般性地假设Lh1最大,且则全局响应的长度Lg=Lh1+Lc-1。分配各个解卷积滤波器的长度值,使得解卷积滤波器组构成的矢量总长度满足条件:

考虑到Lg=Lh1+Lc-1,式(26)也等价于:

式(28)同时隐含了对每一个解卷积滤波器长度的约束条件:

当Lh1,Lh2,…,LhN给定后,即可构造矩阵其中Ci矩阵仍如式(22)定义,但只取其前Lhi列,这样得到的滤波器组可以实现完全解卷积。由于Lh1,Lh2,…,LhN的取值有不同的组合,再加上不同的取值,因此完全解卷积滤波器组并不唯一。此外,如果假设Lh2=Lc-1,则Lhi=0(i≠1,2),即只有两路观测信号即可实现完全解卷积,也说明多路信号解卷积中至少要有两路观测信号才能实现完全解卷积。
3 仿真实验
3.1 SISO系统仿真实验
在这个仿真实验中,原系统冲激响应c0(n)是仿真得到的Lc=800的房间冲激响应序列,如图1所示。

图1 原系统的冲激响应序列c0(n)
为了模拟原系统冲激响应c0(n)估计误差对全局响应g(n)的影响,在原系统冲激响应上增加不同强度的零均值高斯白噪声,即c(n)=c0(n)+v(n),用估计误差信噪比来表示c(n)估计精度。在最佳全局响应时延下得到最小均方误差意义下的解卷积滤波器h(n)后,计算全局响应g(n)=c0(n)*h(n)相对理想全局响应q(n)的均方误差为:
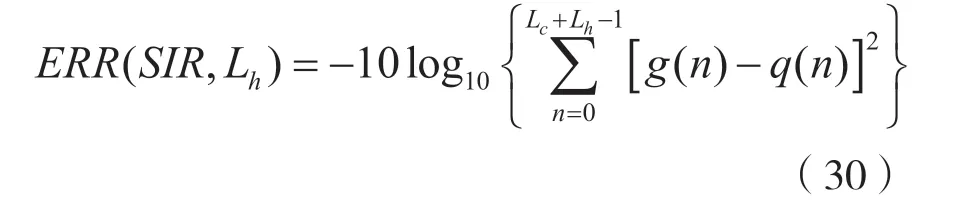
图2中给出了ERR(SIR,Lh)与SIR、Lh之间的关系曲线。可以看出,对于给定的原系统估计误差信噪比SIR,解卷积滤波器越长(图2中的曲线由下向上对应Lh由100增加到1 500),解卷积效果越好,但随着解卷积滤波器长度的增加,解卷积效果的改善越来越小;对于给定长度Lh解卷积滤波器,原系统估计误差的SIR达到某个值(随Lh增大而增大)以上时,对解卷积结果影响很小,这时卷积结果的误差主要取决于解卷积系统h(n)的逼近误差。因此,对于给定长度的解卷积滤波器,一味增加原系统估计精度是没有意义的。
3.2 SIMO系统仿真实验
4路实测房间冲激响应用于SIMO系统解卷积仿真实验Lc=818,如图3所示。
在满足MINT的定理条件下,首先定义不同原系统估计误差信噪比SIR、不同全局响应时延l对应的全局响应均方误差函数ERRMINT:

4个解卷积滤波器的长度分别为Lh1=Lh2=273,Lh3=Lh4=272。原系统c0(n)估计误差信噪比SIR对全局响应均方误差ERR的影响如图4所示。图4中每条曲线对应不同的全局响应时延l=0,20,40,…,1 080。从图4可见,只有在高估计误差信噪比下,ERR近似地随SIR的增加而线性增加;当SIR较低时ERR很小,甚至为负值,无法实现解卷积。
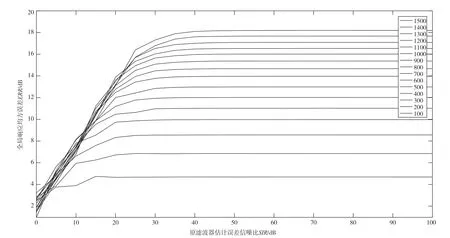
图2 原系统c0(n)估计误差SIR(横轴)、解卷积滤波器长度Lh(对应图中不同曲线)对全局响应均方误差(纵轴)的影响(曲线的排列顺序与图例的顺序一致)

图3 房间4通道冲激响应序列
对ERRMINT(SIR,l)在SIR方向取平均,得到,如图5所示。找到图5中最大值对应的l值,即为最优全局响应时延,在本例中l=100。
对于SIMO系统,在不满足MINT定理时得到的是在最佳全局响应时延下的最小均方误差解。解卷积滤波器等长并满足关系(向下取整,在本例中Lh≤272),仍用式(30)中的ERR来衡量算法性能,结果如图6所示。与SISO系统的结果类似,即越逼近其上限,解卷积效果越好,但噪声稳定性越差。图6中每条曲线对应不同解卷积滤波器长度Lh=27、54、81、108、135、162、189、216、243、270。
图4 在满足MINT定理条件下,全局响应均方误差ERR与原系统c0(n)估计误差信噪比SIR关系曲线(每条曲线对应不同的全局响应时延0,20,40,…,1 080;粗黑线对应最佳全局响应时延下的ERR)

图5 不同SIR下的平均ERR曲线(曲线最大值位置对应最优全局响应时延l=100)

图6 在不满足MINT定理条件下,全局响应均方误差与原系统估计误差信噪比SIR关系曲线
4 结语
理论上,SISO系统的逆滤波器长度越长越好,但由于有限冲激响应逆系统只是理想逆系统的最小均方误差逼近,因此在原系统存在估计误差时,过长的逆滤波器并不能提高解卷积性能,反而增加计算负担。对于SIMO系统,正如文献所述,满足MINT定理的逆系统对噪声过于敏感,而不满足MINT定理的最小均方误差逆系统相对来说噪声稳定性更好,且该最小均方误差逆系统的冲激响应的长度是有上限的。它的上限由MINT定理给出,这与SISO系统截然不同。此外,无论是SISO系统还是SIMO系统,都可以通过对全局响应时延优化来改善逆系统性能。
