基于VAP逻辑规则的交通感应控制改进算法
2021-05-07梁子君刘皓昀
梁子君,刘皓昀,李 军
(1. 合肥学院 城市建设与交通学院,合肥 230601;2. 安徽达尔智能控制系统股份有限公司,安徽 芜湖 241000)
城市交叉口是城市道路交通重要节点,易发生交通拥堵和事故,如何通过交通信号分离交叉口冲突交通流并提高通行效率是减少道路交通事故,改善交通拥堵的重要举措。传统交通感应控制是通过设置车辆检测器实时检测车辆到达交叉口的通行需求,设定相位初始绿灯时间、单位绿灯延长时间和最大绿灯时间等参数,使绿灯时间适应车辆实时通行需求的一种控制方式,其适用于交叉口流量尚未饱和且随机变化较大的情况,可使车辆在停车线前尽可能少停车。传统交通感应控制策略单一,不适用于交叉口流量偏大的情况,为了改进其控制效果,不少学者对感应控制的改进算法开展了研究。基于感应控制的逆向可变车道仿真[1]、基于效率的感应控制方法[2]、基于绿灯时段策略的智能信号灯[3]、基于出租车GPS数据的信号优化[4]、多相位感应控制方案[5]和新颖感应控制方法[6]分别从提升交叉口车辆通行能力、降低车辆延误、提高绿灯利用率、优化信号周期配时参数和相位放行次序等方面提出感应控制改进算法,上述算法是以满足当前绿灯相位的车辆通行需求为前提,缺乏对交叉口所有通行方向车辆排队的统筹分析,并且缺乏对非机动车与行人过街需求的考虑。面向混合交通的感应控制方法[7]、基于感应控制的行人二次过街设计[8]、单口放行方式下的行人相位设计[9]、行人与非机动车专用相位控制方法[10]和基于行人需求的感应控制[11]分别在非机动车对机动车的通行影响、行人与非机动车过街需求等方面提出了行人与非机动车相位优化以及感应控制改进算法,但仍然缺乏对行人、非机动车过街清空时间的考虑,行人过街对机动车通行效率的影响也缺乏分析。基于逻辑规则的感应控制在公交和有轨电车的优先控制中取得了重要成果[12-13],为本文研究兼顾机动车、非机动车与行人通行需求的交叉口感应控制改进算法提供了思路。
本文在兼顾交叉口各个方向车辆排队方面,提出了车辆排队联动控制逻辑规则。在兼顾机动车通行效率和非机动车与行人过街需求方面提出了非机动车与行人过街自动检测控制的逻辑规则,采用VAP完成上述逻辑规则编程设计和感应控制改进算法编译,通过实际交叉口仿真分析,验证本文所提算法的有效性,对于提升交通感应控制的有效性和城市交叉口通行效率具有现实意义。
1 交叉口检测器设置及检测原理
1.1 机动车检测
为了检测机动车通行的连续性,并兼顾交叉口各方向车辆排队情况,需要在交叉口直行和左转进口车道的停车线后约1至3m处设置车头时距检测器,在停车线后约100至150 m(控制排队长度)处设置排队溢出检测器,以分别检测各车道的车辆到达和排队溢出情况,交叉口机动车检测器设置位置示意图如图1所示。
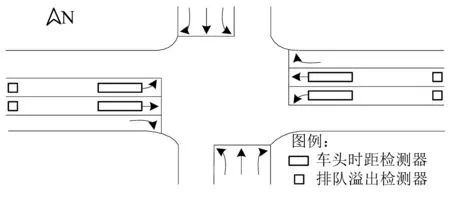
图1 交叉口机动车检测器设置示意图
车辆一旦进入车头时距检测器内,车头时距ΔH即清零,ΔH持续为0,则说明该进口车道持续有车辆通过交叉口的需求,当ΔH不为0且大于一个时间阀值时,说明该进口车道没有后续车辆到达。车辆一旦停留在排队溢出检测器上,车辆占有时间ΔO即每秒递增计数,当ΔO持续大于一个时间阀值时,说明该进口车道存在排队溢出情况,当排队溢出检测器没有检测到车辆存在,则ΔO清零。为了准确监控车辆排队,排队溢出检测器的长度不宜过长,但应稍大于两辆车正常排队时的间距,一般为2至3m。而为了更可靠地检测车辆的连续通过情况,车头时距检测器长度不宜过短,其长度D的计算见式(1)。
D=ht+t0×v
(1)
其中,ht为饱和车头时距值(s),t0为时间余量(s),v为平均车速(m/s)。
1.2 非机动车与行人检测
根据行人的双向通行规则,交叉口每个方向进、出口处的斑马线两端按照上行和下行方向分别设置两个行人自动检测区;根据非机动车的单向通行规则,在交叉口每个方向进、出口处的非机动车通道的一端设置一个非机动车自动检测区。行人、非机动车检测器可以为视频、红外线或微波检测器,其通过设置检测区的方式实时检测非机动车或行人在路边的等待情况,当检测区在一定的持续时间间隔内检测到有非机动车或行人存在时,将为其提交过街请求,直至该方向的行人或非机动车获得绿灯。由于行人或非机动车运动轨迹具有较大随机性,为准确判断其过街需求,检测区域不宜过大,且有明确的方向提示,如图2所示。
2 改进的感应控制逻辑规则与参数设计
2.1 改进的控制逻辑规则
2.1.1 机动车控制逻辑规则

图2 交叉口非机动车与行人检测区设置示意图
为了使每个相位绿灯通过绿灯延长方式满足对应方向车辆通行的同时,又能兼顾其他冲突方向的车辆排队不至于过长,设计了车辆排队联动控制逻辑规则,如图3所示。当一个信号相位绿灯放行时,根据交叉口是否存在排队溢出情况可以区分为不同的控制逻辑Rc和Ru,显然Rc是传统的感应控制逻辑,Ru是新增的车辆排队控制逻辑。若交叉口存在排队溢出情况,则根据当前运行相位存在排队溢出,还是其他相位存在排队溢出,或是当前运行相位和其他相位同时存在排队溢出等情况,Ru又派生出不同的控制逻辑Ru1、Ru2和Ru3,制定不同的绿灯调整规则,具体见表1所列。

图3 交叉口车辆排队联动控制逻辑规则

表1 不同控制逻辑对应的绿灯调整规则
2.1.2 非机动车与行人控制逻辑规则
为了满足非机动车与行人安全过街的同时,兼顾机动车的通行效率,设计了非机动车与行人过街自动检测控制逻辑规则,如图4所示。与常规信号控制不同的是,非机动车与行人相位是独立控制相位,不跟随机动车相位放行。
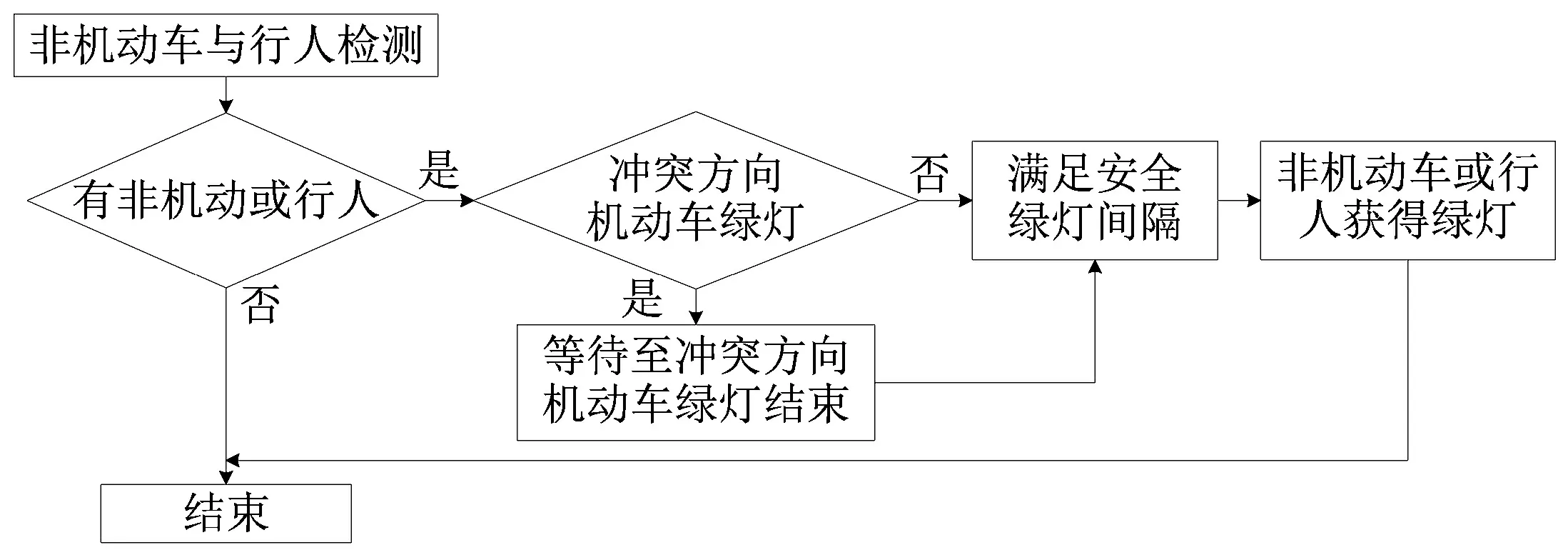
图4 非机动车与行人过街自动检测控制逻辑规则
交叉口具备中央安全岛时,非机动车与行人采用二次过街方式通过交叉口,只要与当前机动车绿灯不冲突,自动检测区一旦检测到非机动车或行人过街请求,且满足安全绿灯间隔时,非机动车与行人相位即开放绿灯。为兼顾车辆通行效率,非机动车与行人相位只运行一次较短的进入交叉口的绿灯时间,为保障过街安全,冲突方向的机动车相位须等待非机动车或行人过街清空时间结束后,且满足安全绿灯间隔才能启亮绿灯。
2.2 感应控制参数
2.2.1 机动车控制参数
(1)最小绿灯时间Gmin
保证进入车头时距检测器内的车辆全部驶出停车线,见式(2):
(2)
其中,hq为车辆启动时间(s),l为排队车辆车头间距(m),其余同上。
(2)单位绿灯延长时间ΔG
满足车辆能从车头时距检测器开出停车线,且大于饱和车头时距,见式(3):
(3)
其中,a为车头时距检测器与停车线之间距离(m),其余同上。
(3)车辆排队清空时间Ts
满足相位绿灯开始时对应方向所积累的最大车辆排队清空,见式(4):
(4)
其中,qi、Si为相位i进口车道车辆到达率(辆/s)和饱和流率(辆/s),Ri为相位i红灯时间(s)。
(4)最大绿灯时间Gmax
将高峰小时定时信号控制方案的相位绿灯时间按照1.25或1.5倍放大确定。
2.2.2 非机动车与行人控制参数
(1)过街时间td
一次过街时间td由进入交叉口绿灯时间t1和过街清空时间t2组成。t2时间段内非机动车与行人不得进入交叉口,但已进入交叉口的可继续安全过街,见式(5)。
(5)
其中,L0、v0为非机动车或行人一次过街距离(m)和过街平均速度(m/s),其余同上。
(2)安全绿灯间隔I
非机动车与行人相位与其存在冲突关系的机动车相位的安全绿灯间隔I计算见式(6)。
(6)
其中,Y为黄灯时间(s),r为全红时间(s),tu为通过时间(s),Sc为基本清空距离(m),Vc为车辆清空速度(m/s),Lv为车辆长度(m),Se为进入距离(m),Ve为进入交叉口速度(m/s)。
3 交通仿真分析
3.1 交叉口仿真建模
选取合肥市锦绣大道与始信路交叉口的交通数据进行仿真建模和分析,交叉口16:30至17:30时段交通流量数据调查见表2所列,交叉口的交通渠化和检测器布置图如图5所示,采用德国Vissim交通仿真软件对交叉口现状交通进行仿真建模,如图6所示。

表2 交叉口16:30至17:30时段交通流量数据
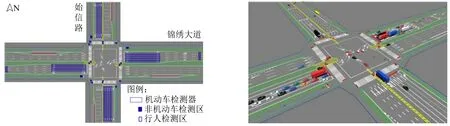
图5 交叉口交通渠化和检测器布置 图6 交叉口交通仿真建模
从表2和图6可以看出,交叉口东西直行方向的流量较大,车辆排队长度较长,且非机动车与行人过街需求量也较大,需要优化控制。分别采用传统感应控制算法和本文提出的感应控制改进算法对交叉口进行优化控制,并对比分析不同算法的交通效益指标。
3.2 VAP逻辑规则编程设计
采用Vissim交通仿真软件的VAP算法编辑模块完成感应控制改进算法的控制逻辑编程设计如图7所示。交叉口采用四相位控制,依次是东西直行、东西左转、南北直行和南北左转,每个机动车相位根据当前通行方向后续是否来车和各相位车辆排队是否溢出的情况分别构建了4个控制逻辑,与表1对应,VAP控制逻辑中各个机动车相位的控制参数说明见表3所列。由于篇幅所限,本文主要给出了机动车的VAP控制逻辑规则,非机动车与行人控制逻辑规则以行人信号灯组21(东口行人)为例进行了举例说明。
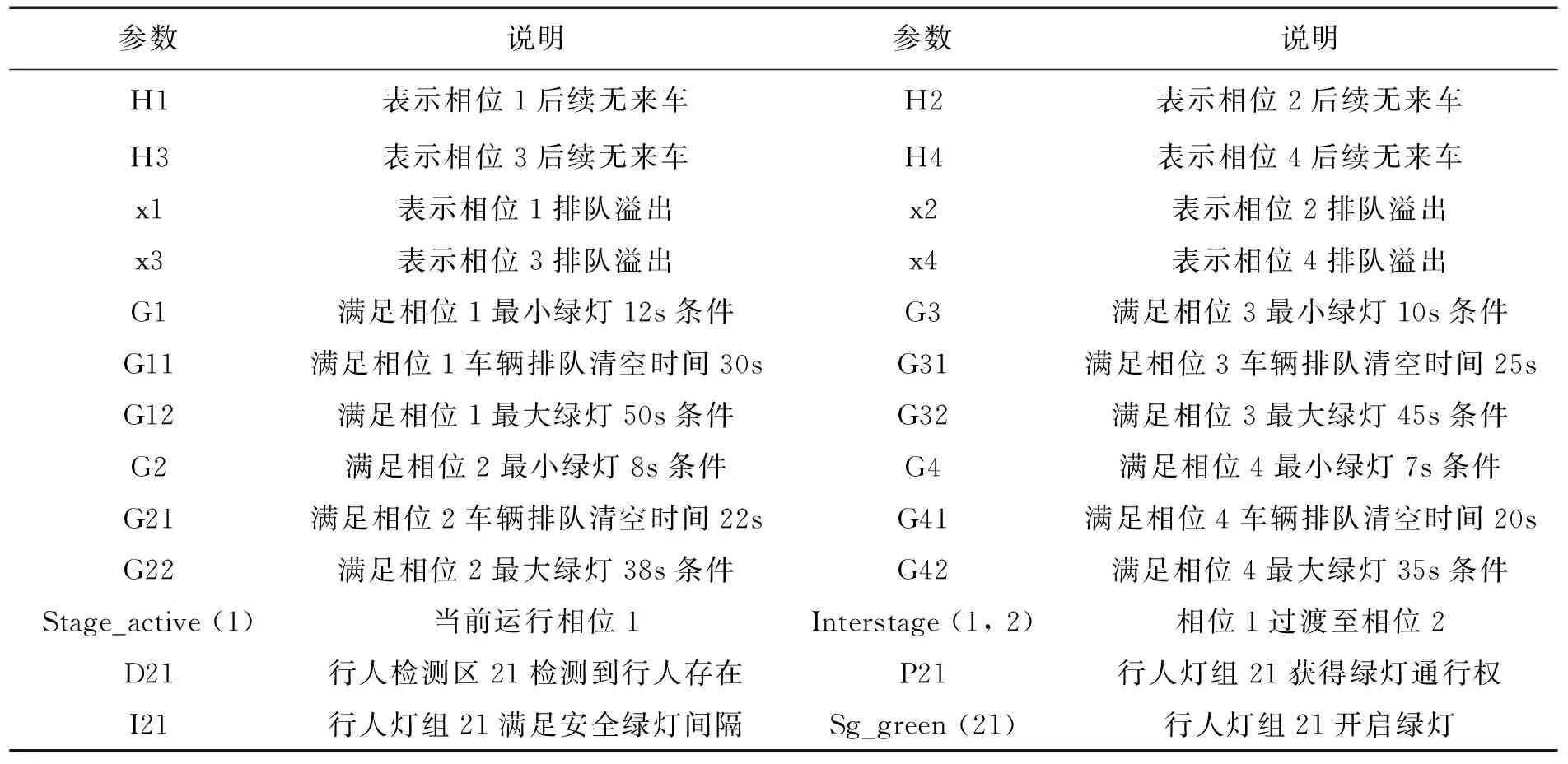
表3 VAP控制逻辑参数说明

图7 VAP控制逻辑规则编程设计
3.3 仿真运行与结果分析
将传统感应控制和感应控制改进算法的VAP控制逻辑编译成算法文件,导入图6的交叉口仿真模型中,以表2流量数据运行仿真3600s,以交叉口车辆平均延误与排队长度、非机动车平均延误和行人过街平均行程时间为评估指标,对比分析现状定时方案A,传统感应控制方案B和感应控制改进方案C的交通效益,分析结果如图8所示。

a)车辆平均延误对比分析 b)车辆平均排队长度对比分析
图8a中方案B和C各个控制方向的车辆平均延误均比方案A有所降低,平均降低了27.6%和21.4%,特别是流量较大的东西和南北直行方向降幅比较明显。而方案C的车辆平均延误比方案B平均增加了7.9%,原因是方案C的车辆需等待行人或非机动车过街清空后才能获得绿灯,使车辆延误增加,而方案B缺乏这一方面的安全考虑。
图8b中方案B和C的各个控制方向车辆平均排队长度比方案A平均降低了21.8%和31%,而方案C的车辆排队长度比方案B平均减少了11.8%,原因是方案C兼顾了各个控制方向的车辆排队长度控制,各方向车辆排队长度相比方案B更为均匀,特别是南北直行方向的车辆排队长度明显小于方案B。
图8c中方案B和C的各个控制方向非机动车平均延误比方案A平均降低了8.8%和5.4%,而方案C的非机动车平均延误比方案B稍有增加,平均增加了3.7%,原因是方案C的非机动车也需等待行人过街清空后才能获得绿灯,使非机动车延误增加。
图8d中方案B和C的各个方向的行人过街平均行程时间(包括红灯等待时间) 均比方案A有所降低,平均降低了22.1%和34%。而方案C的行人过街平均行程时间比方案B平均减少了15.3%,原因是方案C实施了基于二次过街的独立行人相位控制,在与当前机动车绿灯不冲突的前提下,行人获得更多过街的机会。
4 结束语
本文针对传统感应控制在交叉口车辆排队控制和非机动车与行人过街控制方面存在的不足,提出了基于逻辑规则的交通感应控制改进算法,采用VAP完成改进算法的逻辑规则设计,通过实际交叉口数据的交通仿真进行了分析,结果表明,相比传统感应控制,本文所提算法进一步降低了交叉口各个方向的车辆排队长度和行人过街行程时间,在车辆延误变化不大的前提下,有效保障了非机动车和行人过街的清空时间,提高了交叉口通行的安全性。
