基于T-S模型的时变时滞丢包网络控制系统H∞鲁棒控制
2021-05-07肖连军张鸿恺
肖连军,张鸿恺
(1.合肥学院 人工智能与大数据学院,合肥 2306012.安徽建筑大学 电子与信息工程学院,合肥 230601)
0 引 言
随着网络控制系统(NCS)被越来越多的应用在机器人控制、智能制造等领域中,关于NCS的研究已引起了众多学者的关注。[1-4]文献[2]对变时滞离散系统的鲁棒预见控制问题进行了研究。文献[3]研究了一类具有不同丢包概率,并且状态时滞随线性参数变化的离散系统H∞控制问题。文献[4]研究了具有随机时变网络诱导时滞的NCSs鲁棒稳定性与镇定问题。
自T-S模糊模型被提出以来[5],大量的学者开始使用T-S模型研究非线性系统。[5-9]文献[6]基于一类T-S模型构造的非线性时滞系统研究,设计了基于前提不匹配策略的模糊状态反馈控制器。文献[7]和文献[8]分别对一类非线性模糊时变时滞NCSs的鲁棒稳定性问题和非脆弱鲁棒H∞控制问题进行了研究。
针对于此,本文考虑一类T-S模型构造的具有扰动信号、时滞和丢包NCSs,研究其模糊H∞鲁棒控制问题。将描述具有时变时滞和丢包特性的NCSs模型离散化,通过构造Lyapunov函数,结合LMI方法,提出模糊H∞鲁棒控制器的设计方法。
1 问题描述
本文研究的NCS结构如图1所示。其中,τsc为传感器到控制器的时滞,τca为控制器到执行器的时滞,τc为控制器计算时间。令τ = τsc + τc + τca。如果丢包发生在系统前向通道末端,满足已知概率的Bernoulli随机序列。进一步可得控制器状态:

(1)
其中,α(k)是一个取值为0或1的Bernoulli随机序列,满足如下概率分布:

(2)
当α(k)=1时,表示数据传输成功;当α(k)=0时,数据包全部丢失。α已知,0≤α≤1。
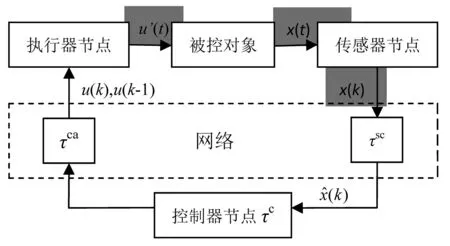
图1 NCS的基本结构
考虑一类由模糊T-S模型描述的时滞丢包NCSs,其第i条模糊规则为:
Ri: Ifθ1(t)isμi1and … andθq(t) isμiq, then
(3)
其中:Ri为模糊模型的第i条规则,m为规则数目,μij为模糊集合,θ1(t),…,θq(t)为系统前件变量;x、y、w、u分别为维度不同的系统状态、控制输出、外部干扰和控制输入变量;Ai,Bi,Ci,Li是已知的适当维数矩阵。
本文NCS系统满足以下条件:
(i)变时滞τ存在信息传输过程中,且τ∈[0,T],T为采样周期;
(ii) 控制器和执行器是事件驱动,传感器是时间驱动。
对系统(3)进行离散化,可得到其NCS离散状态空间表达式如下:
Ri: Ifθ1(k)isμi1and … andθq(k) isμiq, then
(4)

(5)
其中,
选取βij使得λij(T-τ-βij)≤0,从而有
FiT(τ)Fi(τ)≤I
(6)
采用单点模糊产生器、乘积推理机以及中心模糊消除器,系统(4)可表示为:
(7)

考虑模糊控制器如下:

系统(7)全局控制律为:
(8)
则闭环系统为
(9)

本文的目的是针对系统(9),设计控制器(8)满足:
(i)当外部扰动不存在时,研究对象(9)是均方意义下指数稳定的闭环系统;

引理1[10]∀x(k)≠0,如果存在ρ≥0和0<ζ<1,使得E{‖x(k)‖2}<ρζkE{‖x(0)‖2},则研究对象(9)是均方意义下指数稳定的闭环系统。
引理2[10]对Lyaponuv的函数Vx(k)),若有τ>0,μ>0,λ≥0和0<φ<1,使得τ‖x(k)‖2≤V(xk))≤μ‖x(k)‖2,E{V(x(k+1))|x(k)}-V(x(k))<λ-φV(x(k))成立,那么有
引理3 已知D、E、F为适当维数矩阵,且FΤF≤I,则存在任意正数ε,使得DFE+EΤFΤDΤ≤ εDDΤ+ε-1EΤE。
2 主要结果
定理1 对系统(9),如果存在正定矩阵P,Q和实矩阵Ki,满足:
Πii<0,i=1,2,…,m
(10)
Πir+Πri<0,i (11) ψir=(Hi1-DiFi(τ)Ei)Kr,ξir=(Hi0+DiFi(τ)Ei)Kr。 证明构造Lyapunov函数如下V(x(k))=xΤ(k)Px(k)+xΤ(k-1)Qx(k-1),可得: 因为E[α(k)-α]=0,E[(α(k)-α)2]=β2,当w(k)=0时,可得 根据矩阵的schur引理,由不等式(10)、(11)可知E{V(x(k+1))|x(k)}-V(x(k))<0,所以E{V(x(k+1))|x(k)}-V(x(k))=ζT(k)Θζ(k)≤-λmin(-Θ)ζT(k)ζ(k)<-δζT(k)ζ(k) 取μ=max{λmax(P),λmax(Q)},则有0<δ≤μ,可得 根据引理1和引理2可得,系统(9)是均方意义下指数稳定的。 当w(k) ≠0时,由不等式(10)、(11)可得 证毕。 定理2 对系统(9),给定正常数γ,若存在对称正定矩阵X,U和矩阵Wi,Ti,以及正常数εir,满足: ηii<0,i=1,2,…,m (12) ηir+ηri<0,i (13) 则闭环系统(9)是均方意义下指数稳定的,并具有H∞范数上界γ。 其中, 证明:利用引理3及矩阵的Schur补性质,式(10)等价于 (14) 将(14)式分别左乘和右乘矩阵diag(I,I,βI,I,P-1,Q-1,I),并记X=P-1,U=Q-1,Ti=KiU,Wi=KiX,多次使用矩阵的Schur补性质,可化为式(12)。 同理可证得 (13)式。 考虑如下模糊非线性双时滞离散不确定系统: R1:Ifθ1(t)isM1(maximum),Then R2:Ifθ2(t) isM2(minimum),Then 模糊隶属度函数满足M1=1-M2。式中系数 选择采样周期T= 0.1,对系统进行离散化,得到新的状态方程对应参数为 取ε11=ε12=ε21=ε22=1,γ=1,通过采用LMI工具箱求解式(12)、(13)可得 T1=[2.8076 -2.7920], T2=[2.8080 -2.7924],W1=[1.5025 -1.4680],W2=[1.5027 -1.4682]。 系统的模糊H∞控制器K1=[1.4582 -1.4838],K2=[1.4854 -1.4840]。 对于具有变时滞和丢包的T-S模糊NCS,研究了其模糊H∞鲁棒控制问题。假设丢包发生在系统前向通道末端,满足已知概率的Bernoulli随机序列分布。通过构造Lyapunov函数,结合LMI方法,证明了研究对象是均方意义下指数稳定的闭环系统,给出H∞鲁棒控制器存在条件。利用矩阵的Schur补性质,设计了模糊H∞鲁棒控制器,并以LMI形式表示。最后通过数值算例进行校验,仿真结果表明对于变时滞丢包网络控制系统模型,给定正常数γ,按照本文提出的算法,计算可得系统的模糊H∞控制器,从而证明该闭环系统是均方意义下指数稳定,并具有H∞范数上界。



3 数值算例

4 结 论
