直升机自转飞行的最大过载系数试飞验证
2021-05-07李永寿
李永寿
(中国飞行试验研究院, 西安 710089)
在直升机研制中,过载系数通常指基本设计重量所对应直升机重心处的法向过载。最大过载系数与直升机的用途密切相关,是直升机设计的重要参数之一。它既决定了直升机结构设计的载荷,又是直升机机动性好坏的重要标志[1],更是试飞考核验证的重要战技指标之一。
俯冲拉起是获得直升机最大过载系数的有效方法,是在直升机对称面内以规定空速进行平飞或俯冲,急剧后拉杆并产生规定过载的机动飞行。文献[2-3]对其试飞方法进行了详细介绍,但仅涉及了有动力情况下直升机的最大过载系数验证方法,而对自转飞行的最大过载系数验证方法没有涉及。所谓自转飞行就是直升机无发动机功率输入的特殊飞行状态,近些年随着文献[4]对自转飞行的最大过载系数限制值做出了明确规定,亟须在直升机飞行试验中对自转飞行的最大过载系数予以验证。
文献[4-6]中规定了军用直升机若干典型的严重受载飞行状态,其中自转情况下俯冲拉起是验证直升机自转情况下最大过载系数的最为合适的试飞科目。该科目是直升机在自转飞行时规避障碍物进行拉起并产生一定过载系数的一种机动飞行科目。目的是考核直升机在无动力机动飞行状态下产生规定过载系数的能力,以验证直升机在无动力情况下结构强度是安全可靠的。目前,该科目尚未在中国直升机型号飞行试验中开展试飞,这是因为该科目在实际飞行中伴随着非常大的风险,主要体现在以下方面。
(1)自转过程中,后拉杆过快,易引起结构载荷超限,导致关键部件结构损伤,严重时会出现旋翼桨叶打到尾梁现象,造成直升机损伤的风险。
(2)自转过程中,若速度控制不当,直升机就会以较大的下降率下降,如安全高度不够,存在触地风险,危及飞行安全。
(3)自转过程中,若速度控制不当,容易引起直升机整机振动水平加大,导致飞行员对仪表判读困难,影响飞行安全。
(4)自转过程中,直升机机动稳定性差,若出现dig-in现象易导致过载超限及直升机操纵改出困难。
(5)自转过程中,旋翼可用升力相比有动力时低,执行俯冲拉起时容易造成旋翼升力衰减,存在直升机失速的风险。
为此,建立一种安全可行的自转情况下俯冲拉起的试飞方法,是验证直升机自转飞行最大过载系数的关键。针对此问题,首先,从直升机最大过载系数理论估算模型入手,分析影响最大过载系数的关键因素;其次,通过模拟自转下滑试飞得出的直升机下降率随前飞速度变化关系,确定自转情况俯冲拉起的初始试验高度和自转进入速度;再次,通过对俯冲拉起操纵输入特点分析,研究前、后纵向重心位置对过载系数的影响,以确定自转情况下俯冲拉起的直升机纵向重心位置;最后,给出开展自转情况下俯冲拉起试飞科目的试验条件、方法、步骤、风险和安全措施,并通过实际飞行试验验证方法的可行性和正确性。
1 最大过载系数理论估算数学模型
在直升机研制中,过载系数n通常是指基本设计重量所对应直升机重心处的法向过载,是直升机设计中非常重要的参数,直接影响直升机重量、性能和安全。过载系数是由旋翼拉力Tr、机身升力TF、平尾升力TH和短翼升力Twi之和与直升机重量G之比所得[7],即
(1)
对于单旋翼带尾桨直升机,尽管直升机的机身、平尾、短翼对过载系数均有不同程度的影响,但起决定作用的仍然是旋翼,约占总升力的90%,下面重点讨论旋翼对过载系数的影响。
直升机在机动飞行时产生的过载与旋翼桨叶剖面气动特性、直升机的重量、重心、飞行速度、驾驶员的操纵动作(即操纵量、操纵规律、操纵速率)或外界的扰流(即突风的大小和方向)等因素有关。同时,过载系数的大小还受振动水平、噪声、机身姿态以及直升机不稳定性等因素限制[1]。因此,如何确定过载系数是个复杂的问题。由于过载系数受多种因素的影响,把这些因素全考虑进去是不可能的,通常采用如式(2)进行估算[7],这种方法简便、可靠。
(2)
(3)
(4)
(5)
(6)
式中:nmax为最大过载系数;下标n表示产生nmax时的值;下标t表示平衡状态时的值;a0为平均锥度角,(°);B为叶端损失系数;μ为前进比;CY,max为翼型最大升力系数;Ω为旋翼转速,rad/s;σ为桨叶实度;CT为拉力系数。
在飞行试验中,假设在产生nmax时μn、a0,n均变化不大,那么式(2)可改写为
(7)
式(7)能够对直升机最大过载系数予以简单估算,同时也可分析影响最大过载系数的关键因素。
通过式(7),得到有助于分析影响最大过载系数因素的结论如下:
(1)CY,max越大,nmax越大;由CY,max的表达式[式(4)]可知,CY,max的决定因素是(CT/σ)t,一般采用如图1所示的曲线来确定(CT/σ)max。
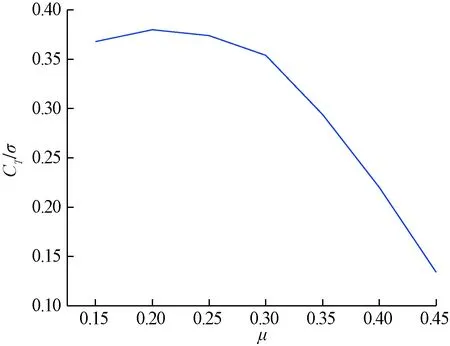
图1 CT/σ随前进比μ的变化曲线Fig.1 Curve of CT/σ changing with μ
(2)Ωn/Ωt越大,nmax越大。
(3)若认为Tr≈G,由式(6)可知道,直升机越轻,旋翼转速越高、桨叶实度σ越大,则(CT/σ)t越小,nmax越大。
2 过载影响因素分析
当直升机进入飞行试验阶段,此时旋翼桨叶是设计参数是确定的,即桨叶的CY,max和实度σ也是确定的。为此,在飞行试验阶段,验证自转飞行的最大过载系数时,便不需考虑CY,max和实度σ的影响,但在桨叶设计阶段应予以重点考虑。
通过最大过载系数理论估算数学模型[式(7)],分析影响nmax的主要因素包括:
(1)旋翼转速。正常的旋翼转速在直升机的总体设计时是确定的,然而在机动飞行过程中,由于作用在桨叶上的力矩不平衡,必然引起旋翼的加速或减速,这就有可能使旋翼转速高于或低于正常旋翼转速。旋翼转速对过载的影响规律是:转速越高、过载系数越大。由式(7)可知,不同旋翼转速间过载系数转换关系为
(8)
(2)飞行高度。飞行高度改变,是通过大气密度ρ的改变来影响nmax的,由式(6)可知,高度增加,大气密度降低,(CT/σ)t增加,CY,t增大,引起nmax减小。
如果已知高度为0时的过载为n0,则某一高度的过载值nH[1,7]为
(9)
式(9)中:ρH为压力高度为H时的大气密度;ρ0为海平面标准大气密度。
(3)飞行重量。直升机飞行时,飞行重量并不都是基本设计重量,但根据旋翼产生的最大拉力能力不变这一原则,可建立不同重量之间最大过载系数转换关系为
(10)
式(10)中:下标1表示对应基本设计重量;下标2表示对应某一重量。可见,重量越小,过载系数就越大。
(4)飞行速度及俯仰角速率。根据直升机飞行力学导出的过载系数表达式为
(11)
通过前面的分析,确定合适的飞行重量、高度、速度、旋翼转速是开展自转情况下俯冲拉起试飞科目的关键影响因素,其直接影响最大过载系数的产生。
3 自转飞行
直升机自转飞行是无发动机功率输入的特殊飞行状态,它和直升机有动力飞行一样,需要消耗能量来克服旋翼的型阻、机身废阻,并带动附件工作,其能量来源于旋翼在相对来流过程中的风车效应。在自转下滑过程中,旋翼受相对来流驱动,将直升机高度势能转化为旋翼旋转动能,来提供旋翼升力和带动相应附件工作。Johnson[8]、王适存[9]详细介绍了直升机失去动力后的自转飞行情况,王鹤等[10]对直升机自转试验及安全特性进行了介绍。
通常直升机自转飞行包括三个阶段,分别是自转进入、稳定自转下降和自转着陆,图2给出了直升机典型自转着陆过程示意过程。
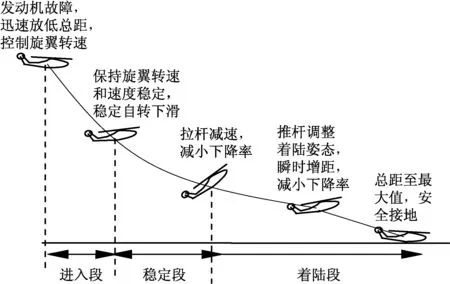
图2 直升机典型自转着陆过程示意图Fig.2 Schematic diagram of typical helicopter autorotation landing process
在开展自转情况下俯冲拉起试飞科目前,需要确定合适的飞行速度。为此需要研究直升机自转下降率随前飞速度的关系。在实际飞行试验中,由于真正的直升机自转下滑试飞要求关闭全部发动机,具有较大的风险性,目前一般采用模拟自转下滑来进行自转飞行的研究。模拟自转下滑是指直升机在空中处于慢车状态,此时直升机旋翼与主减速器脱开。直升机模拟自转下滑与实际的自转下滑飞行的区别是带有很小的发动机输出功率,但此时发动机输出功率非常小,对试飞结果不会产生很大的影响[11]。
试飞方法就是在安全试验高度(一般自转飞行的试验初始高度不应低于压力高度1 500 m),选择七八个速度点为自转下滑进入速度,进行稳定直线配平飞行6 s,将左右发动机置于慢车状态,同时调整总距,保持旋翼转速在无动力旋翼转速范围内,对直升机进行操纵,保持直升机姿态、自转下滑进入速度、下降率及旋翼转速不变,进入稳定自转下滑状态。当直升机稳定下滑至安全离地高度后,将左右发动机置于正常飞行状态,同时操纵直升机退出自转下滑状态。为了确保试验安全,直升机退出自转下滑状态时的最低安全试验高度应不低于1 000 m。
飞行试验中,自转飞行时下降率是飞行重量、飞行速度、大气密度和旋翼转速的函数,表达式为
-VZ=f(G,ρH,V,nr)
(12)
式(12)中:VZ为下降率,m/s;V为飞行速度,km/h;nr为旋翼转速,r/min。
根据高度随时间变化求下降率的表达式为
(13)
式(13)中,Hp为压力高度,m;TH为试验高度Hp处绝对温度,K;TS为标准大气条件下的绝对温度,取288.15 K。
通过模拟自转下滑飞行试验,最终得到某型直升机基本设计重量的自转下降率随前飞速度的变化曲线(数据做归一化处理),如图3所示。
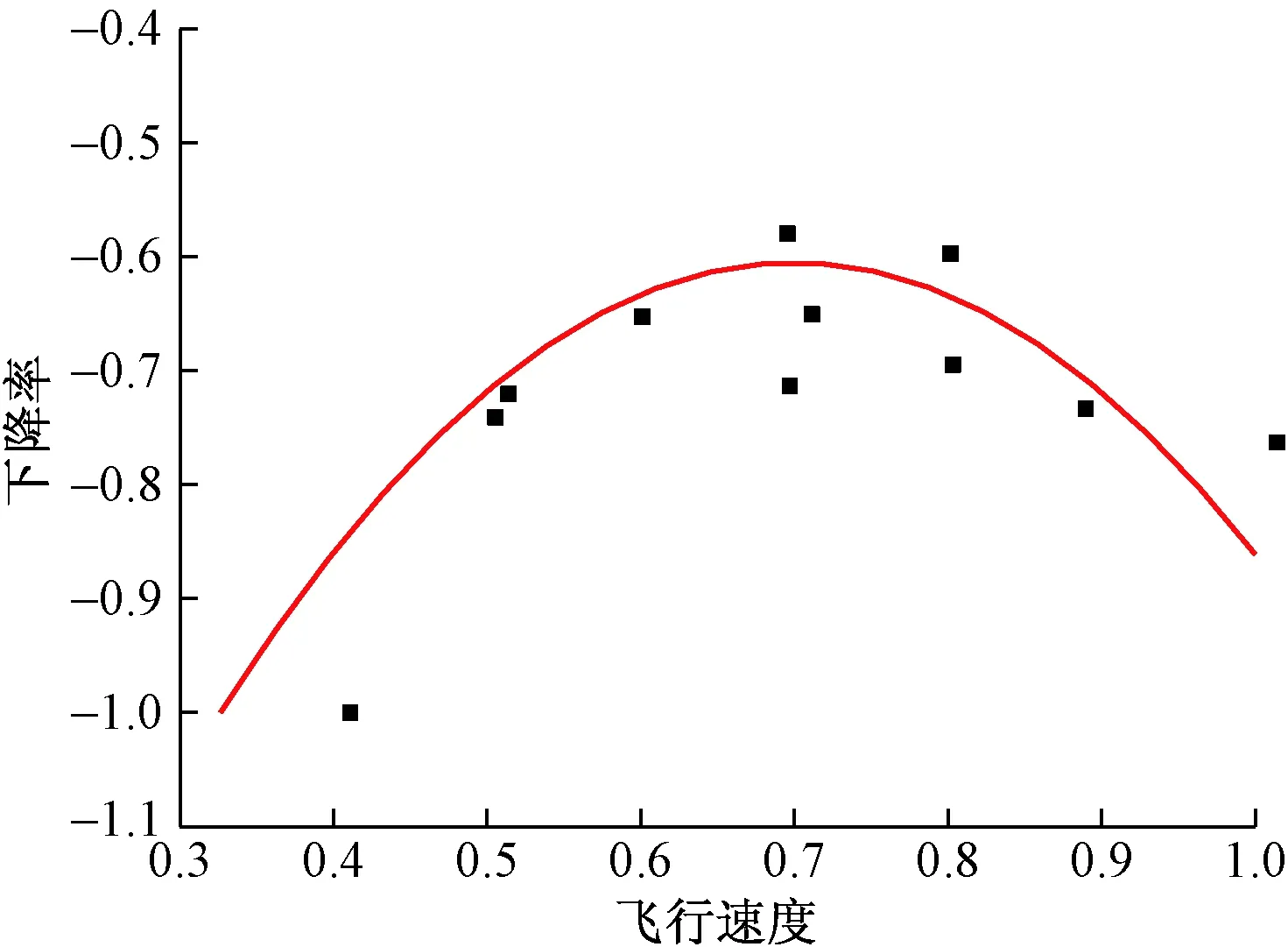
图3 某型直升机自转下降率随前飞速度变化曲线Fig.3 Curve of autorotation descent rate of helicopter with forword flight speed
由式(11)可知,开展自转情况下俯冲拉起科目时,为更容易获得最大过载系数nmax需要选取图3中较大飞行速度。但为了飞行安全,建议选取试验的最大速度或80%无动力不可逾越速度中的较小者作为自转情况下俯冲拉起科目的参考速度。这也符合国军标中“规定的飞行速度应为不带功率的最小下降率的前飞速度与不带功率时的最大飞行速度”中的任一中间速度时的配平飞行空速。
这里需要强调的是,自转下滑过程中,自转旋翼转速直接影响着直升机安全。过大的旋翼转速会使旋翼的需用功率增大。为了保证稳定的自转下滑,直升机单位时间的势能损失就需增大,以满足增大的旋翼需用功率,这会造成直升机下降率增大,危及直升机安全。过小的旋翼转速,也会引起下降率的增大,同时,旋翼所储备的旋转动能小,也不利于自转飞行。因此,直升机在自转状态下滑时,旋翼转速应控制在规定的转速范围内。
4 俯冲拉起
俯冲拉起是直升机最重要的受载状态之一,它通常使旋翼及其支撑结构、中机身承受最严重受载情况。其在直升机对称面内以规定空速进行平飞或俯冲,急剧后拉杆并产生规定过载的机动飞行。对于每个给定空速,重心处的过载应符合过载包线值,旋翼转速在正常旋翼转速包线范围内。
俯冲拉起时的操纵输入比较复杂,由于自转情况下俯冲拉起是在模拟自转情况下做的俯冲拉起试飞科目,这就不允许进行明显的总距操纵,因此,自转飞行情况下仅适合单独拉杆操纵以获取规定的过载系数。后拉杆时,桨盘后倒,桨盘迎角增加,同时旋翼后向力和桨毂俯仰力矩亦增加,从而使直升机产生抬头的俯仰运动和垂直运动。由于直升机俯仰惯性阻尼比较大,后拉驾驶杆需一段时间才能达到过载峰值。通常,大型直升机时间长些,而小型直升机要短些。图4所示拉杆后过载系数与最大过载系数比n/nmax随时间的变化。图5所示为同样拉杆量时过载系数随前进比μ的变化曲线,可以发现:
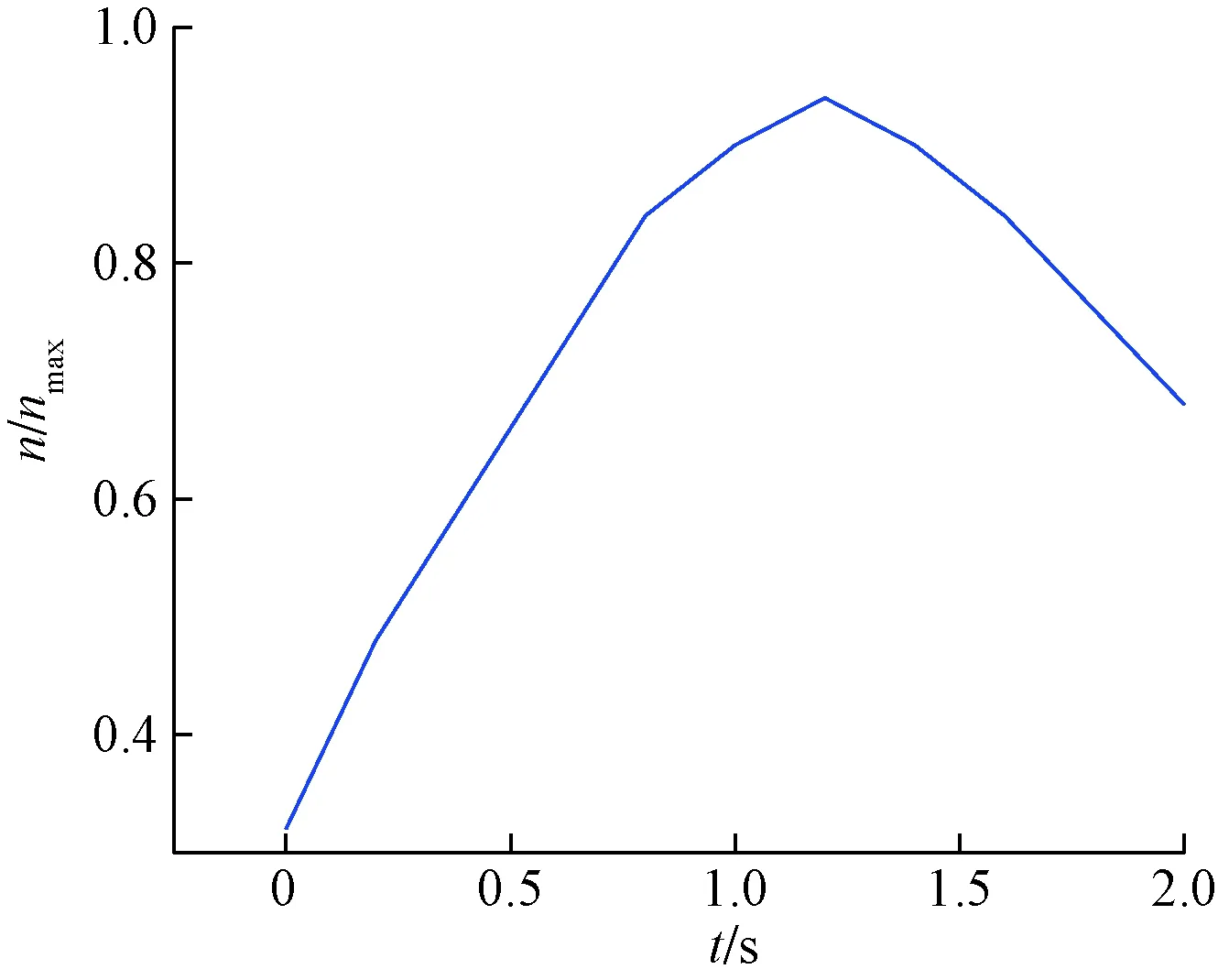
图4 后拉杆时过载系数随是随时间的变化曲线Fig.4 Change of overload coefficient with the pull stick
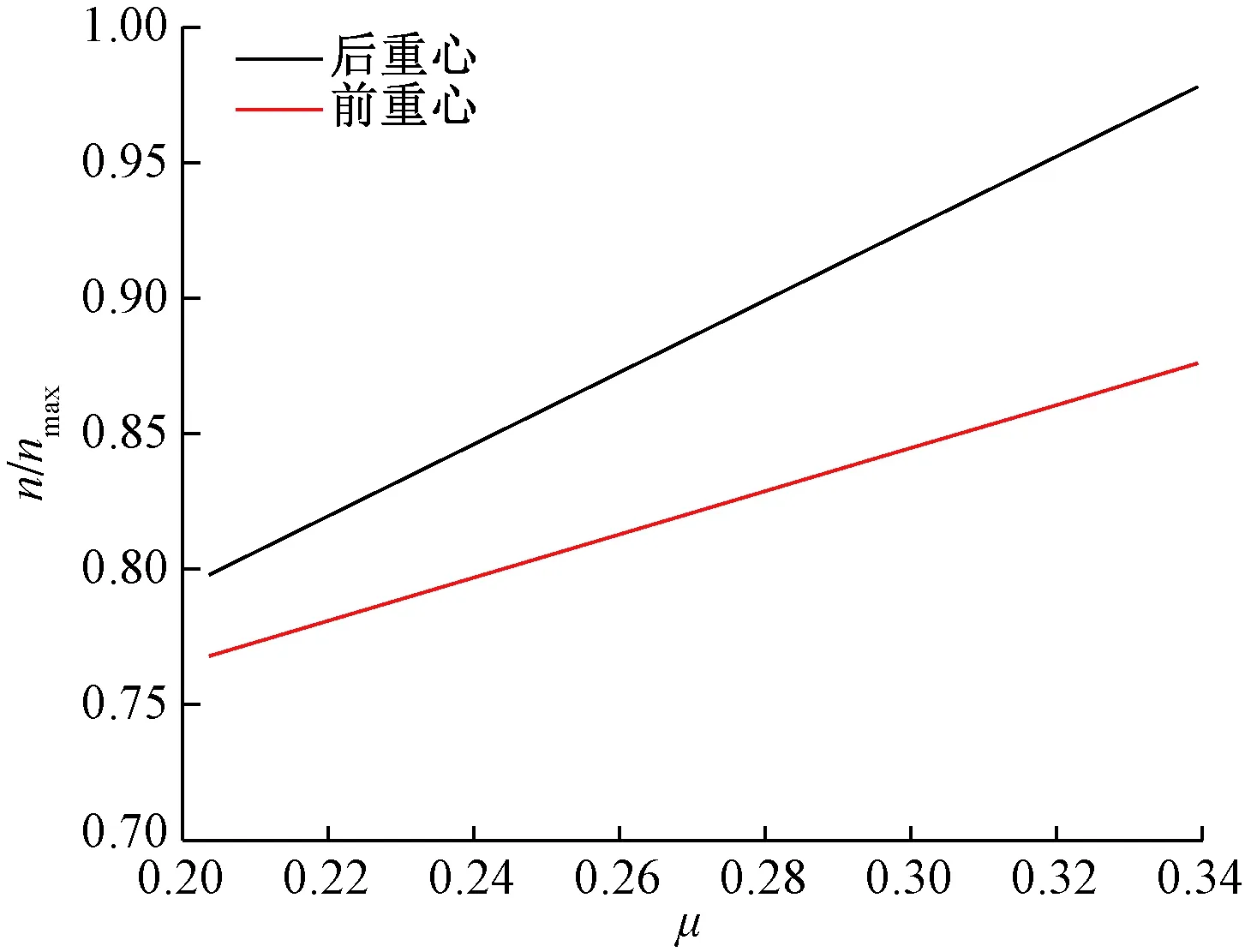
图5 相同拉杆量时过载系数随前进比的变化曲线Fig.5 Change of overload coefficient with μ under the same pull stick
(1)在同样的拉杆量下,飞行速度越大,n值越大,这与式(11)的结论是一致的。
(2)后重心的μ-n曲线高于前重心的μ-n曲线,这是因为,当重心在旋翼轴前方时,前重心时旋翼拉力产生的低头力矩增量,使桨盘迎角相对减小,拉力相对减小,载荷相对较小。而后重心则刚刚相反,使过载增大。
(3)前重心时,为产生规定的过载值,必须施加比后重心更大的操纵量。
综上分析,自转情况下的俯冲拉起宜选用后重心,这样相对更容易获取最大过载系数nmax。
5 自转情况下的俯冲拉起试飞方法设计
最大过载系数是直升机使用方最为关注的战技指标之一,通常均要通过飞行试验验证。其验证飞行属于结构强度试飞的范畴,是直升机的最严重受载情况,必须遵守循序渐进、先易后难的原则,以保证飞行安全。
自转情况下的俯冲拉起是验证直升机在无动力自转情况下,以规定的旋翼转速范围和自转下滑速度,在规定时间内后拉操纵杆退出陡下滑的机动飞行,随之产生一定的法向过载系数。其过载系数在规范中要求如下:在海平面标准大气条件下,对应发动机停车时的旋翼最大转速,过载系数限制值为2.0。
下面介绍自转情况下的俯冲拉起试飞方法。
5.1 试验条件
通过前面过载系数影响因素分析,在飞行试验中应选取如表1所示的试验条件,试验场地的压力高度为380 m。
5.2 试飞方法
步骤1直升机在规定试验高度和规定自转下滑进入速度稳定直线配平飞行6 s。

表1 试验条件Table 1 Test conditions
步骤2保持飞行速度不变,柔和调整总距,控制直升机进入模拟自转下滑状态,同时保持旋翼转速在无动力最小旋翼转速到无动力最大旋翼转速范围内,稳定模拟自转下滑状态。
步骤3在稳定自转下滑状态下进行适当匀速后拉杆操纵,操纵位移1~2 cm,使直升机产生一定法向过载系数。
步骤4将左右发动机置于正常飞行状态,同时操纵直升机退出自转下滑状态。
步骤5直升机爬升到初始试验高度,重复步骤1~4,其中,每次后拉杆的操纵量都在上一次试验基础上增加1 cm。
步骤6达到规定的法向过载系数,试验结束。
5.3 安全措施
由于该科目在实际飞行中伴随着非常大的风险,为此需要制订如下安全措施,以确保飞行试验安全:①试验中严格遵守自转飞行的过载限制值;②试验中后拉杆切记不要过猛过量,防止过载和旋翼转速超限;③执行自转情况下的俯冲拉起时,拉杆要柔和,注意控制直升机俯仰姿态;④试验中注意控制安全高度;⑤试验全过程需实时监控飞行安全。
6 飞行试验及结果评定
6.1 试飞实施过程
根据前面给出的试飞方法,在某型试验机上开展了自转情况下的俯冲拉起飞行试验,实施过程如下:图6所示为试验关键参数时间历程曲线。
步骤1压力高度Hp=2 500 m,以表速Vi为80%无动力不可逾越速度稳定配平飞行至少6 s。
步骤2保持飞行速度不变,柔和调整总距,控制直升机进入模拟自转下滑状态,同时保持旋翼转速在无动力旋翼转速范围内,使直升机处于稳定模拟自转下滑状态。
步骤3在目标高度,为了防止旋翼转速过度变化,进行匀速后拉杆操纵,直升机过载逐渐增大。
步骤4待接近目标过载值时,随后顶杆及协调操纵,直升机过载系数出现峰值。
步骤5恢复直升机姿态,提距改出模拟自转下滑状态。
从图6可以看出,直升机自转情况下的俯冲拉起清晰的分为六个阶段:配平飞行段、自转进入段、稳定自转下降段、带杆拉起段、顶杆退出段和自转下滑退出段。
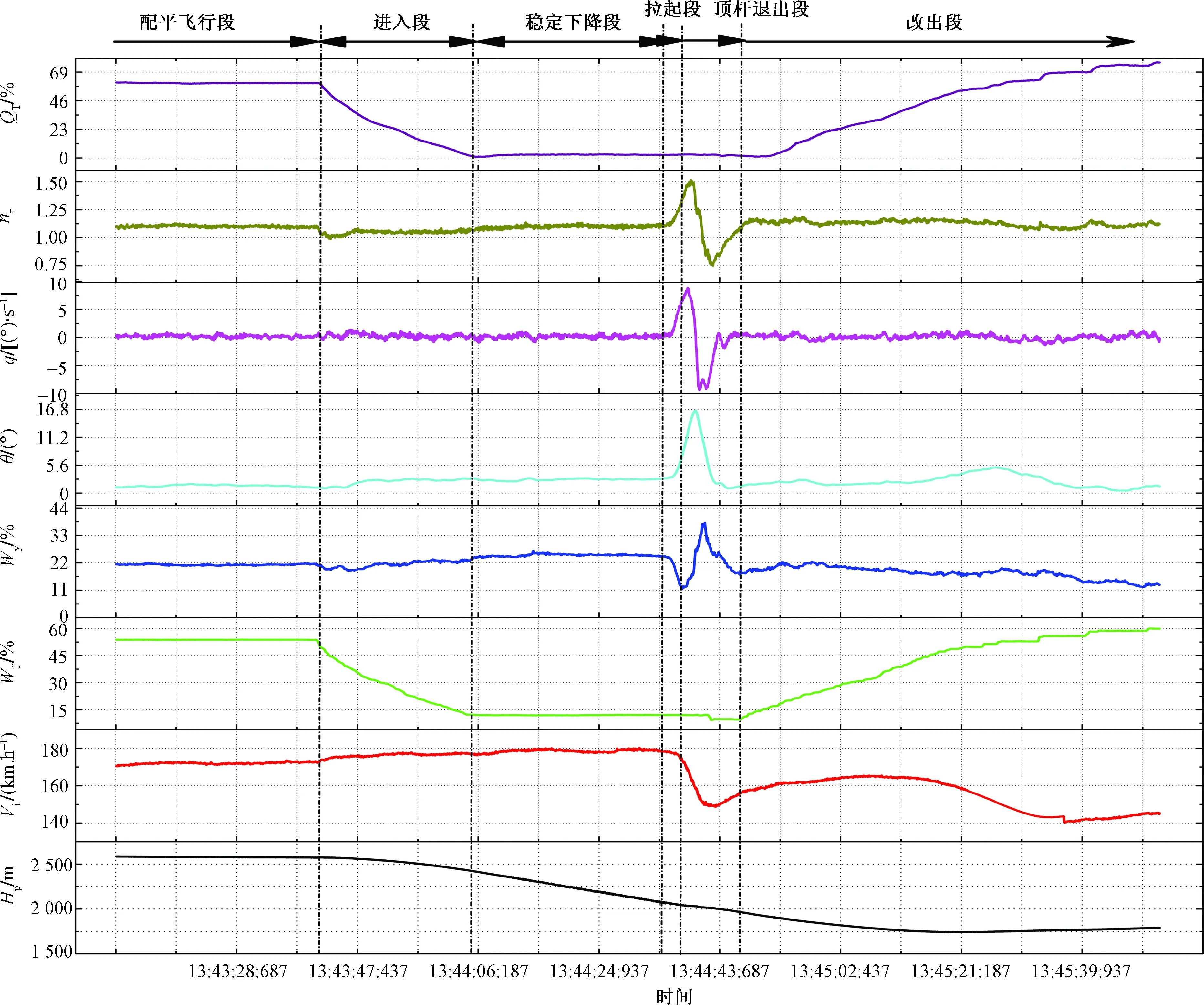
图6 自转情况下俯冲拉起飞行时间历程曲线Fig.6 Flight time curve of dive and pull up in case of autorotation
通过飞行试验曲线,可以看出在稳定自转下降段,总距Wf放置较低的位置,发动机总扭矩QT降至最低,直升机已经进入稳定自转下滑,随后驾驶员进行后拉杆操纵Wy,总距保持不动,直升机的俯仰角θ、俯仰角速率q随之变大,直升机过载逐渐增大,待直升机后拉杆操纵达到要求的操纵量后,驾驶员顶杆操纵,直升机过载系数nz出现峰值达到1.51,整个驾驶杆的操纵量都在操纵行程范围内,见图7。
在整个飞行过程中,直升机工作正常,飞行员反应良好,飞行状态参数均处在正常范围之内,试验圆满完成。
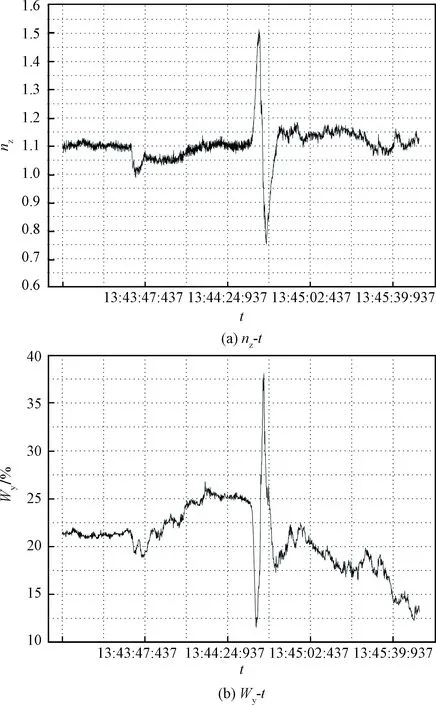
图7 过载系数nz与纵向操纵位移Wy的飞行时间历程曲线Fig.7 Flight time history curve of overload coefficient and longitudinal control displacement
6.2 最大过载系数换算
最大过载系数的影响因素,主要包括飞行重量、高度和旋翼转速等,将式(8)~式(10)联立,可得到将飞行实测过载系数nf试验结果转换至基本设计重量G、海平面标准大气条件下的过载系数表达式为
(14)
式(14)中:G0为基本设计重量;Gf为飞行实际重量;Ωf为飞行时旋翼转速;Ωmax为110%旋翼额定转速。
由图7可知,飞行试验中过载系数nf最大达到1.51,此时旋翼转速Gf为105%旋翼额定转速,此时飞行高度为Hp=2 500 m,对应的ρH/ρ0=0.793,直升机实际飞行重量Gf为基本设计重量的98.7%。

6.3 过载系数规律分析
此次试验中,还研究了过载系数随带杆量、旋翼转速变化关系,验证了式(8)和式(11)的过载系数表达式的正确性。
图8给出了自转飞行时,相同拉杆速率、不同带杆量与过载系数百分比(占无动力最大过载系数2.0的百分比)的关系曲线。过载系数与带杆量之间呈现线性关系,这是因为相同带杆速率,带杆量越大,俯仰角速率越大,过载系数越大,与式(11)的理论分析结果一致。
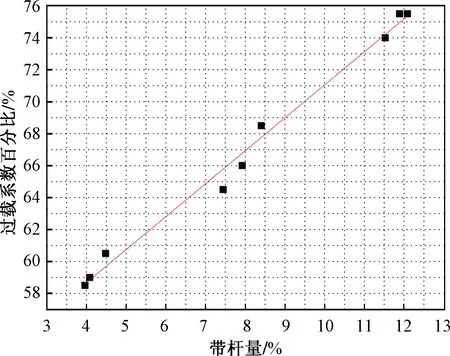
图8 过载系数随拉杆量关系曲线Fig.8 Relation curve of overload coefficient with pull rod quantity
图9给出了自转情况下,旋翼转速与过载系数百分比(占无动力最大过载系数2.0的百分比)的关系曲线。随旋翼转速的增加,过载系数越大,呈现明显的抛物线增长趋势,与式(8)的理论分析结果一致。
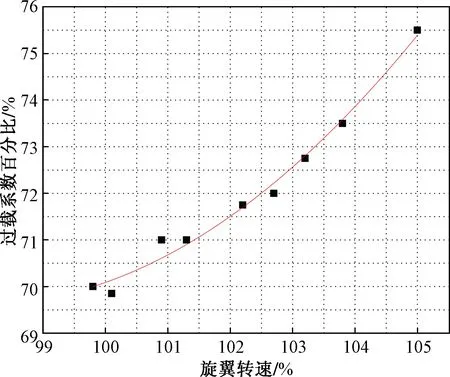
图9 过载系数随旋翼转速变化关系曲线Fig.9 Relation curve of overload coefficient with rotor speed
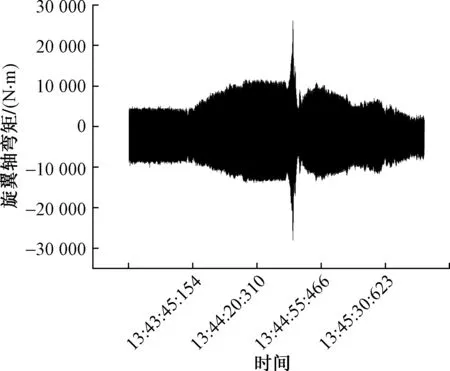
图10 旋翼轴弯矩飞行时间历程曲线Fig.10 Flight time history curve of shaft bending moment
6.4 强度评估
考虑到自转情况下的俯冲拉起时,旋翼轴作为主要承力传力部件,对其结构载荷的动、静载荷进行了评估。图10给出了自转情况下的俯冲拉起时旋翼轴弯矩时间历程曲线,可以看出在自转情况下俯冲拉起时旋翼桨毂上会产生较大的俯仰滚转力矩,引起旋翼轴承受的弯矩载荷也随之增大,其峰值达到其限制值的34%,交变载荷约为疲劳极限的50.2%。因此旋翼轴结构强度裕度充分,自身结构是安全。
6.5 结果评定
试飞结果表明,自转情况下的俯冲拉起试飞获得的过载系数达到了2.06,满足国军标要求自转飞行的最大过载系数2.0。
7 结论
建立了一种安全可行的自转情况下的俯冲拉起的试飞方法,成功验证了直升机自转飞行的最大过载系数。
(1)本文通过直升机最大过载系数理论估算模型分析给出了影响最大过载系数若干关键因素及各因素与过载系数的物理关系。
(2)通过模拟自转下滑试飞方法得出的直升机下降率随前飞速度变化关系,确定自转情况的俯冲拉起的初始试验高度不应低于压力高度2 500 m,以及自转进入速度为试验最大速度的80%。
(3)分析了适用于自转情况下俯冲拉起的单独后拉杆操纵输入特点,研究了直升机纵向重心位置对过载影响,确定自转情况俯冲拉起的适宜纵向重心位置应为后重心。
(4)通过对最大过载系数影响因素的分析,在模拟自转下滑和俯冲拉起成熟的试飞方法基础上,科学设计了自转情况下的俯冲拉起试飞方法,包括试验条件、方法步骤、安全措施。
(5)采用本文给出的自转情况下俯冲拉起试飞方法,实现了对直升机自转飞行最大过载系数的试飞验证,获得了过载系数随拉杆量、旋翼转速的变化关系曲线,与理论分析结果一致,方法正确可行。
通过直升机自转飞行的最大过载系数试飞验证方法研究,成功实施了自转情况下俯冲拉起飞行试验,所掌握和获取的试飞方法和宝贵的飞行试验数据,一方面对后续直升机型号开展此类科目提供了方法参考,另一方面对试飞工程师和试飞员的理论和驾驶技术培训具有较高的科学研究和推广应用价值。
