无人旋翼机旋翼气动分析与试验研究
2021-05-06吴裕平
吴裕平,解 望
(中国直升机设计研究所,景德镇333001)
自转旋翼机(又称“旋翼机”)是一种以自转旋翼作为升力面、螺旋桨推/拉力作为前进动力的旋翼类飞行器。旋翼机与飞机不同,它主要靠旋翼产生升力,而没有固定机翼或只有辅助机翼。旋翼机与直升机也不同,它的旋翼和发动机没有连接,不能提供前进拉力和操纵力矩。旋翼机结构简单,失速速度小,起飞距离短,安全性高,成本低,所以受到大众喜爱。近年来无人飞行器发展迅速,无人旋翼机也应运而生[1]。
旋翼机的诞生早于直升机,通过不断试验和总结研制的Cierva C.4 型旋翼机在1923 年飞行成功[2]。20 世纪60~70 年代,美国联邦航空管理局(FAA)认证McCulloch J-2 和Umbaugy 旋翼机,两型 机 各 生 产 约100 架[3-4]。21 世 纪,小 型 载 人 旋 翼 机在航空爱好者中得到广泛发展,美国格莱恩兄弟航空公司和Carter 公司使用现代航空技术让旋翼机再次成为热点[5-6],迄今美国旋翼机拥有量达2 万余架,但这些主要是载人旋翼机,针对无人旋翼机的技术研究和产品研制较少。
旋翼机的旋翼依靠前方来流吹动,始终处于自转状态,飞行中旋翼桨盘向后倾斜,气流从下往上穿过桨盘[7]。直升机的旋翼在发动机驱动下,自上向下吸入空气穿过桨盘。因此,许多国家研究机构纷纷对旋翼机特殊的气动环境开展研究,但无人旋翼机的相关研究并不多见。1994 年,美国开展了直径1.06 m 无人旋翼机2 片桨叶旋翼90°迎角自转风洞试验[8],2004 年,Maryland 大学针对空中抛放式无人旋翼机,进行了自转旋翼起转特性的试验研究[9-10],研究方向主要是飞行动力学和飞行控制。国内王焕瑾团队研究了自转旋翼的气动优势,以及保持稳定飞行的旋翼转速关系[7]。朱清华博士对旋翼机关键技术进行了深入研究,并完成了1 650 kg ZX1 型旋翼机总体方案设计[11]。
旋翼机在不同飞行速度下,通过操纵旋翼轴倾斜角度,稳定旋翼转速,并得到所需要的升力,用于平衡全机重力[11]。旋翼一直保持自由旋转,旋翼功率表述为旋翼阻力与飞行速度的乘积,需要发动机传输给螺旋桨的可用功率来解决[12]。
本文针对某无人旋翼机方案设计需求,建立旋翼机气动模型进行无人旋翼机气动力计算,开展设计参数对旋翼气动特性的影响研究,得到了旋翼拉力和轴倾角操纵规律,并完成风洞试验验证。
1 旋翼气动设计参数
旋翼设计参数主要包括桨盘载荷、旋翼半径、桨叶片数、旋翼实度及桨叶弦长等。无人旋翼机属于轻小型,桨盘载荷较小,一般小于12 kg/m2[13]。在起飞总重量G 和桨盘载荷p 确定的情况下,可以根据下式确定旋翼半径R

无人旋翼机采用两片桨叶和跷跷板式桨毂,旋翼实度较小。确定了旋翼实度σ 和桨叶片数k,就可以确定桨叶弦长b

本文研究的无人旋翼机起飞质量为22 kg 左右,旋翼实度为0.045,采用OA212 翼型的矩形布局。旋翼桨叶采用无扭转设计,即气动扭转角沿桨叶展向不变化。
2 旋翼气动特性分析
2.1 旋翼气动模型
从叶素理论出发,引入动态入流求解诱导速度的非均匀分布,表达式为

式中:r 为桨叶径向位置,ψ 为方位角,λ0为诱导速度平均值,Kx、Ky为前飞状态诱导速度变化参数。
然后,根据诱导速度计算桨叶各处剖面的相对来流速度和来流角。剖面合速度为
桨叶剖面迎角包括剖面安装角θ(无总距操纵)和来流角α,关系式为

式中:UP为剖面垂向速度,UT为切向速度,Ωr为旋转线速度,V0为飞行速度,αs为旋翼轴倾角,vi为各处诱导速度(与λ 对应),β̇为挥舞角速率。根据马赫数和迎角,可得叶素升力和阻力为
式中:ρ 为空气密度,CL、CD为剖面翼型的升力系数和阻力系数,dr 为桨叶微段长度。再转化为叶素拉力(平行旋翼轴方向)和旋转阻力
最后,积分各个叶素拉力和阻力,就得到整片桨叶的气动力,再考虑各方位角下K 片桨叶相加得到整个旋翼气动力。
2.2 旋翼半径影响
作为旋翼机的升力面,旋翼升力与旋翼半径、总距紧密相关,首先分析半径对旋翼性能的影响。
在总距为1°、桨尖速度为120 m/s 的情况下,旋翼半径从1.2 m 增加到1.8 m,旋翼轴倾角基本不变,旋翼拉力明显增大,从180 N 增加到400 N左右。如图1 所示,旋翼轴倾角随着飞行速度增大而减少,当飞行速度为16.67 m/s 时,旋翼轴倾角约为13.95°,而当飞行速度增加到33.33 m/s 时,旋翼轴倾角迅速降低至4.18°。如图2 所示,其他参数不变时,随着旋翼半径加大,旋翼升力相应增大。旋翼拉力随着飞行速度增加而略有降低,由于此时旋翼轴倾角(竖直为0°,后倒为正)也降低,因此旋翼升力能够维持不变,从而平衡全机重力。
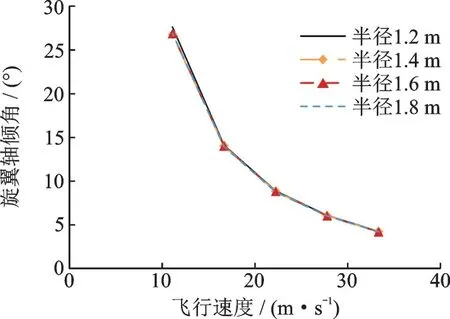
图1 不同半径下旋翼轴倾角随飞行速度变化曲线Fig.1 Rotor shaft angle varying with fight speed at different radius
旋翼桨尖速度不变的情况下,旋翼升力不随飞行速度改变。也就是说,在一定范围内,桨尖速度和升力是一一对应的。飞行速度增加,虽然桨叶相对气流速度增加,但是气流迎角却减小,这是因为在速度增大的情况下要保持桨尖速度不变,桨盘迎角(轴倾角)必须相应减小,导致桨叶气动力变化很小,因此总升力基本不变。
2.3 旋翼总距影响
一般旋翼机的旋翼总距(安装角)很小,主要是出于旋翼转速不能太低的考虑[14],因为一定拉力时,总距越大转速越小。
旋翼拉力随总距增大而增大,如图3 所示,在旋翼半径为1.6 m,桨尖速度为120 m/s 的情况下,总距从0°增加到2°,旋翼拉力从270 N 增加到370 N 左右。
旋翼轴倾角随总距增大而减少,在桨尖速度为120 m/s、飞行速度为22.22 m/s 的情况下,2°总距对应的轴倾角为7.7°,1°总距对应的轴倾角为8.8°,0°总距对应的轴倾角为10.1°,如图4 所示。
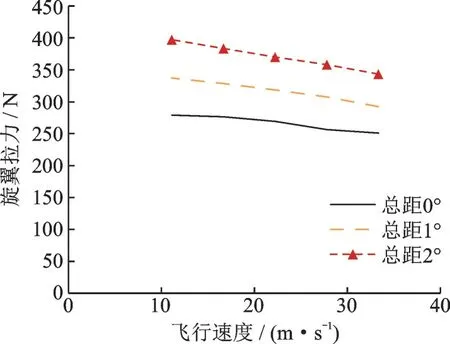
图3 不同总距下的旋翼拉力随飞行速度变化曲线Fig.3 Rotor thrust varying with fight speed at different collective pitch
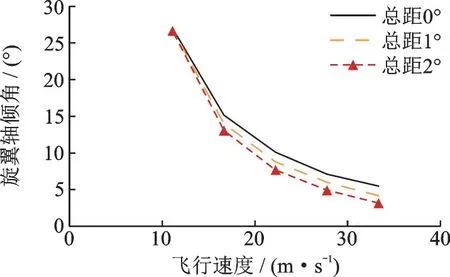
图4 不同总距下的旋翼轴倾角随飞行速度变化曲线Fig.4 Rotor shaft angle varying with fight speed at different collective pitch
假设旋翼拉力恒定为250 N,则总距主要影响转速。如图5 所示,随着总距增加,所需要的旋翼转速降低,半径为1.6 m 的旋翼总距为0°时转速为700 r/min 左右,总距2°时转速为600 r/min 左右。而且旋翼半径越大,旋翼转速越低。
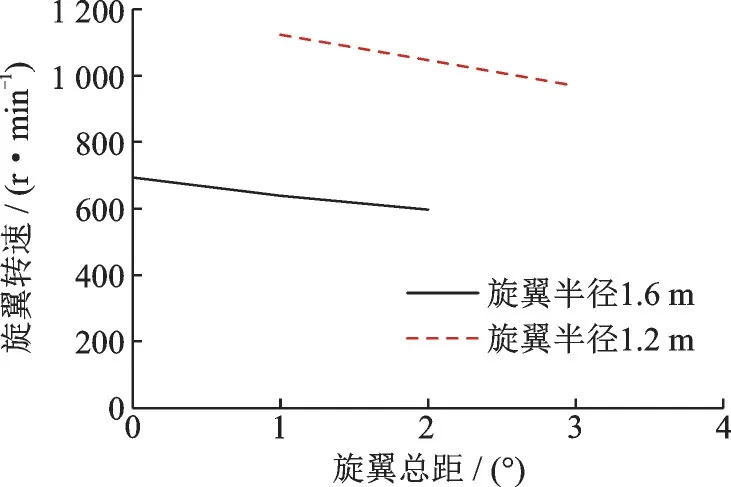
图5 旋翼转速与总距关系曲线Fig.5 Relationship between rotation speed and collective pitch
旋翼总距较大时,小飞行速度下难以保持平衡,这说明随着总距增大,维持较小的桨尖速度需要的最小气流速度(飞行速度)增大。即在一定的总距下需要达到一定的飞行速度,旋翼才能维持自转,这就是自转旋翼机旋翼总距一般较小的原因。
2.4 旋翼轴倾角操纵
旋翼机通过控制轴倾角以适应不同飞行状态,得到需要的旋翼拉力[15]。旋翼轴与机体连接,通过一套拉杆机构可以操控旋翼轴倾斜角。为得到相同的旋翼拉力,飞行速度增加时,需要减少旋翼轴倾角,同时旋翼转速保持不变;当飞行质量降低时,需要减少轴倾角(旋翼转速同步减少),从而稳定飞行状态。
如图6 所示,在旋翼半径为1.4 m,总距为1°的情况下,小转速时的轴倾角小,旋翼拉力也小。桨尖速度从100 m/s 提升到140 m/s,旋翼拉力增加约160 N,轴倾角降低2.5°~12.5°,大速度时降低量小。轴倾角操纵量不能太大,否则旋翼后倒太多容易与机身尾面发生碰撞。
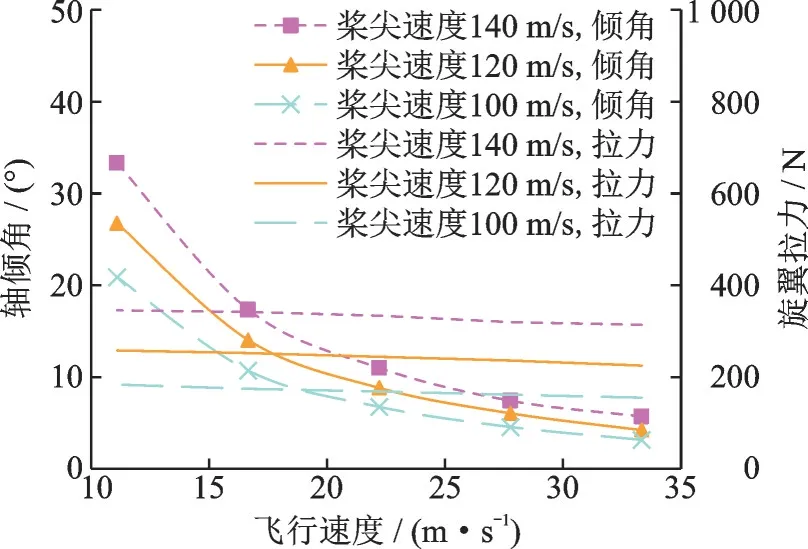
图6 旋翼轴倾角与旋翼拉力随飞行速度变化规律Fig.6 Rotor shaft angle and thrust versus flight speed
飞行速度减小时,要保持桨尖速度ΩR不变(也就是升力不变),则桨盘迎角(对应轴倾角)必须增大,但桨盘迎角不应过大(一般不超过20°),这就对最小飞行速度提出了限制要求。
3 旋翼机试验
3.1 试验设备与模型
试验在直流式开口低速风洞(图7)进行,试验段尺寸为8 m×6 m,最大风速为55 m/s。机身通过撑杆安装到支架上,采用布置在机身内部的应变式天平测量得到试验件六力素。
研制的无人旋翼机(称为“试验机”)旋翼半径为1.5 m,风洞试验时试验件包括旋翼、旋翼轴罩(旋翼与机身之间的整流罩)及机身(不含机翼、尾翼、推进桨)。试验时旋翼轴与机身之间的倾斜角保持3°不变,通过调节机身迎角实现旋翼轴倾角的控制。试验风速范围为10~30 m/s,升力L 垂直于风向向上,阻力D 与来流风向一致。

图7 风洞试验设施Fig.7 Wind tunnel test facility
3.2 独立机身试验
首先拆除桨叶,进行机身吹风,得到机身气动特性。如图8 所示,机身阻力随机身迎角增加而略有增加,受风速变化的影响较大,风速越大阻力越大。风速为30 m/s、迎角为2.92°时,机身阻力为40.42 N。
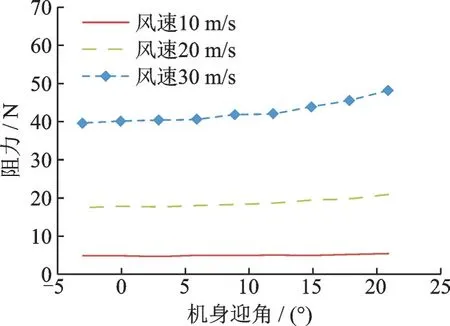
图8 不同风速下机身阻力随机身迎角变化规律Fig.8 Fuselage drag varying with angle of attack at differ-ent wind speed
把阻力折算到阻力系数

阻力系数随机身迎角增大而增大,平均值在0.062 左右(图9)。小风速时测量结果略有波动,主要是由于风洞气流在小速度时不稳定。
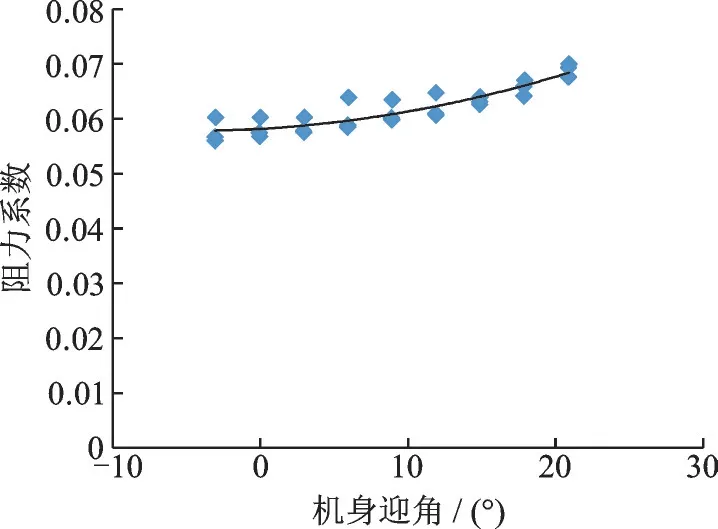
图9 机身阻力系数随机身迎角变化曲线Fig.9 Fuselage drag coefficient versus angle of attack
当机身迎角为正(抬头)时,机身一般产生正升力。如图10 所示,机身迎角增大,机身升力随之增大。风速为30 m/s 时,机身迎角由0°增加到20.9°,机身升力由4 N 增加到28.8 N。风速越大,升力越大。
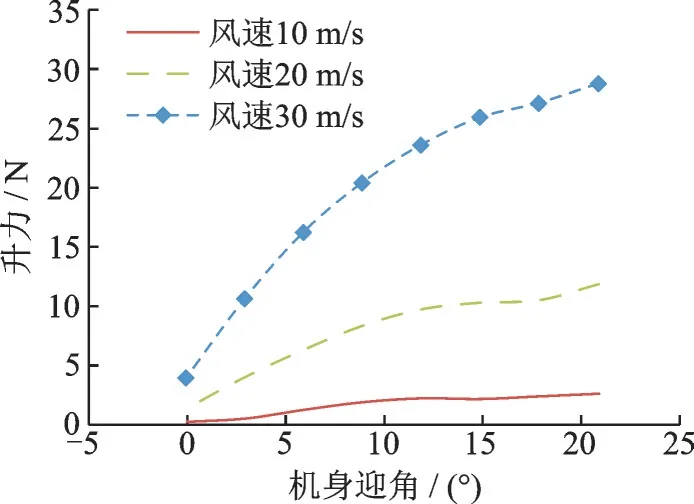
图10 不同风速下机身升力随机身迎角变化曲线Fig.10 Fuselage lift varying with angle of attack at different wind speed
3.3 机身+旋翼试验
在机身吹风完成后,为获取旋翼气动力,在机身桨毂上安装旋翼桨叶,对“机身+旋翼”组合体进行吹风试验。试验中旋翼为自转状态,受气流驱动旋转,并无其他动力驱动。旋翼总距保持0°不变,机身+旋翼组合体测试数据减去独立机身测试数据,就可以得到旋翼数据。升力向上为正,阻力与来流方向一致,为风轴系下结果,作用点在桨毂中心。
由于旋翼升力明显大于机身升力,因此机身+旋翼组合体升力与旋翼升力差别很小。如图11 所示,旋翼升力随轴倾角的变化非常明显,轴倾角越大升力越大。这说明操纵旋翼轴倾角,可以直接控制旋翼升力大小,实现旋翼机的爬升或下降。风速为30 m/s 时的升力明显大于风速为20 m/s 时的升力,而且,风速为30 m/s 时升力随轴倾角的变化斜率更大。这说明,随着飞行速度增大,若轴倾角不变旋翼升力增大,为了保持升力不变需要减少旋翼轴倾角,大速度时操纵旋翼轴倾角更加敏感。
阻力方面,除了机身部分产生阻力外,旋翼也产生阻力,其主要是由旋翼轴向后倾斜造成。如图12 所示,旋翼阻力随着轴倾角增大而增大,相同轴倾角时风速为30 m/s 时的阻力明显大于风速为20 m/s 时的阻力。
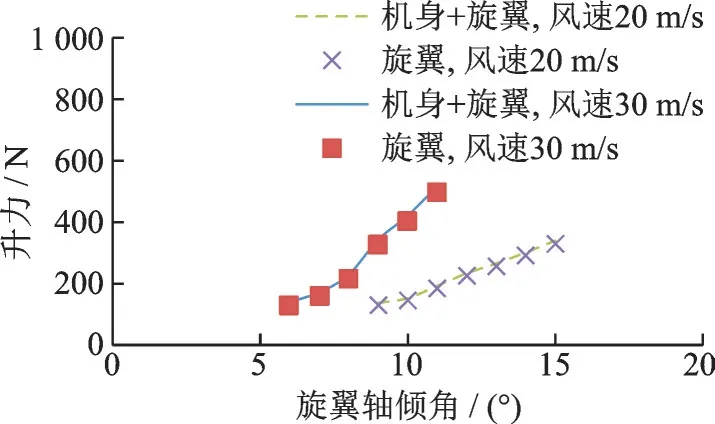
图11 旋翼机升力随轴倾角变化规律Fig.11 Gyroplane lift versus rotor shaft angle
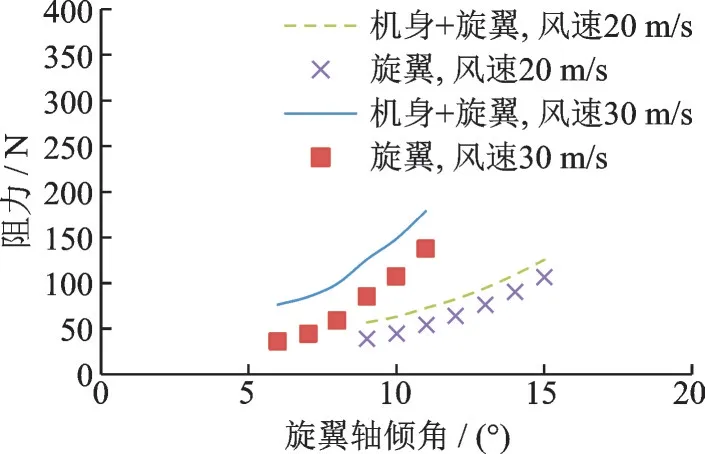
图12 旋翼机阻力随轴倾角变化规律Fig.12 Gyroplane drag versus rotor shaft angle
旋翼升力与阻力的比值,即升阻比,可以表示旋翼前飞时的气动效率。升阻比随飞行速度增大而增大,试验中最大升阻比为3.83(图13)。
3.4 与计算结果对比
对旋翼升力和阻力进行矢量合成,得到旋翼拉力
应用上述建立的旋翼气动模型,计算得到与试验状态相对应的旋翼拉力,通过操纵旋翼轴倾角进行旋翼配平(需用功率为0)。如图14 所示,计算结果与试验结果趋势一致,数值吻合性好。飞行速度为20 m/s 时需要操纵轴倾角至11.5°左右,才能达到试验机所需要的旋翼拉力。
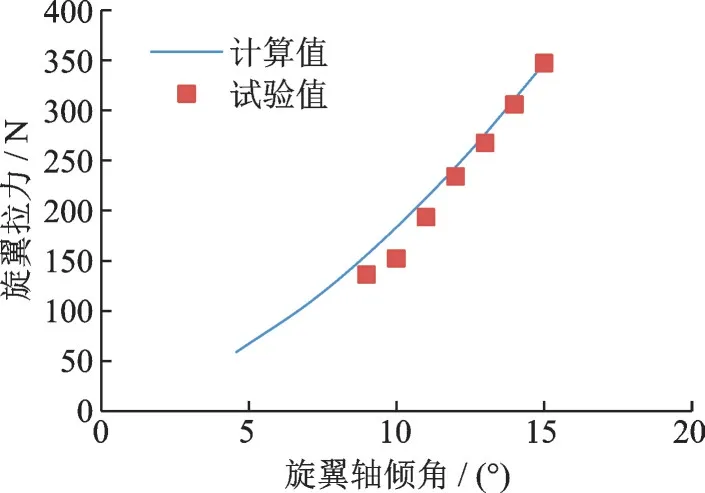
图14 旋翼拉力计算值与试验值对比Fig.14 Comparison of calculated results with experimental data for rotor thrust
4 旋翼拉力公式
根据以上分析,旋翼拉力除了跟旋翼设计方案紧密相关外,还跟飞行状态有关。本文试验机的旋翼拉力可以拟合成以下方程表示

式中:v 为飞行速度,α 为轴倾角。从式(14)可以看出,旋翼拉力与飞行速度的平方成正比,与轴倾角的1.5 次方成正比关系。也可以说,在保持旋翼拉力不变的情况下,飞行速度的平方与轴倾角的1.5次方成反比例关系,这对飞行控制律设计具有重要指导作用。
对式(14)进行推广,可以写成

式中:E 为常数项,它取决于旋翼设计方案和飞行环境。F 为轴倾角指数,不同旋翼方案F 取值不同,它跟旋翼翼型及桨距角相关。R 为旋翼半径,σ为实度,ρ 为大气密度,θ 为桨距安装角,f 为系数。
以半径1.2 m,实度0.045,桨距角1°的旋翼方案为算例,对拉力式(15)进行验算。系数e=17,f=10,于是E=4.2,F=1.3,此旋翼拉力公式为

应用本文建立的旋翼气动模型对半径1.2 m旋翼方案进行不同状态下的拉力计算,并与式(18)计算结果进行对比,如图15 所示,两者数值接近,吻合性好。
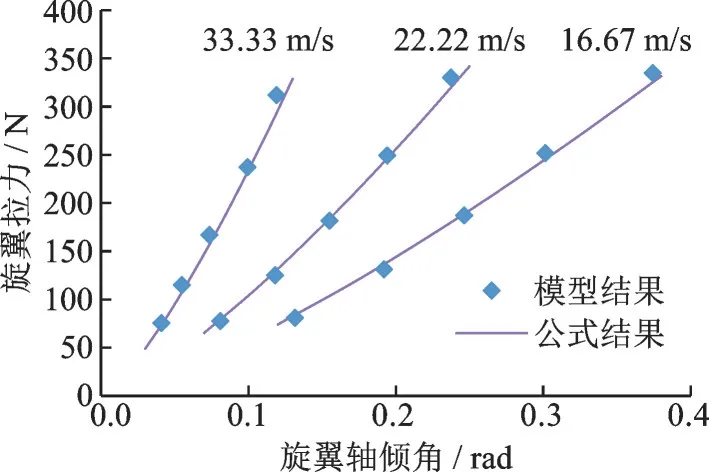
图15 不同方法得到的旋翼拉力对比Fig.15 Comparison of rotor thrust by different methods
5 结 论
本文针对无人旋翼机,建立了旋翼气动力计算与试验方法。通过旋翼气动特性的对比分析,可以得出以下结论:
(1)当旋翼半径增大时,旋翼轴倾角不变,旋翼拉力增大。当旋翼总距增大时,旋翼拉力随之增大,旋翼轴倾角减少。旋翼机的旋翼总距一般很小,在0°附近。
(2)旋翼机通过控制轴倾角,以适应不同飞行速度,速度越大轴倾角越小,以保持所需要的旋翼拉力。旋翼转速随着飞行速度基本不变,不同飞行重量对应不同转速,旋翼转速需要保持在合理范围内(桨尖速度100~180 m/s)。
(3)试验机的机身阻力和升力,随风速增大而增大,随迎角增大而增大。旋翼升力明显大于机身(无机翼)升力,轴倾角越大升力越大,旋翼阻力主要是由旋翼轴向后倾斜造成。
(4)旋翼拉力跟设计方案、飞行状态和操纵相关。对于本文研制的无人旋翼机方案,稳定平飞时旋翼拉力与飞行速度的平方、轴倾角的1.5 次方成正比关系。