基于扩展电压矢量的永磁同步电机预测控制
2021-05-05肖仁鑫王晓贾现广
肖仁鑫,王晓,贾现广
(650500 云南省 昆明市 昆明理工大学 交通工程学院)
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有体积小、效率高、结构简单、可靠性好等优点,随着我国制造工艺的不断进步和对永磁材料的开发力度的增加,被广泛应用于航空航天、工业生产和电动汽车等场合中[1-3]。
直接转矩控制(Direct Torque Control,DTC)和磁场定向控制(Field Oriented Control,FOC)是目前永磁同步电机的基本控制策略。相较于磁场定向控制,直接转矩控制采用的是转矩、磁链双滞环结构,通过查表后选择电压矢量,其鲁棒性强,结构简单,转矩响应快[4-5]。而滞环控制器其自身原因有开关频率不恒定,同时,每个周期只能输出一个电压矢量,该电压矢量作用于整个周期,导致直接转矩控制转矩和定子磁链脉动。国内外众多研究人员为解决上述问题,提出了许多改进方案,如改进查表法[6]、空间矢量脉宽调制[7]、占空比调制的直接转矩控制[8]和模型预测直接转矩控制[9-10]等。
文献[9]提出了一种模型预测直接转矩控制策略,该策略采用多步预测的方法预测电机在不同电压矢量作用下的运行趋势,通过代价函数进行评估,选择最优的电压矢量输出,通过进行多步预测,可以使其所选的开关长期保持最优状态,实现长期最优控制效果,可以有效降低逆变器开关频率,但由于预测步长较多,导致计算量过大,难以在实际中应用;文献[11]提出基于一种快速模型预测控制策略,只预测一次,虽然减少了计算量,但存在稳态情况下精度不高等问题;文献[12]结合李雅普诺夫理论,计算得到最优电压矢量,通过SVPWM 输出,虽在一定范围内限制转矩脉动,但效果不显著。通常单步预测控制只使用8 个基本的电压矢量作为备选矢量,且仅考虑在一个控制周期内的最优,没有考虑未来周期内的最优控制;文献[13]通过包含转矩误差控制、电流大小控制和最大转矩比电流控制的价值函数驱动电机稳定运行,但其价值函数仅仅实现了电机的稳定运行,没有考虑降低定子磁链脉动以及降低逆变器的开关频率。
为了能在保持传统有限集模型预测控制抗扰性能的同时,降低转矩和磁链波动,提高模型的预测精度,本文提出一种基于扩展矢量的转矩预测控制。该策略在基本电压矢量个数的前提下,增加备选矢量个数,通过两步预测选择最优开关矢量,并通过电压矢量筛选的方式,降低模型预测的计算量。经与传统的模型预测转矩控制进行对比,验证了本文所提策略的有效性和可行性。
1 永磁同步电机数学模型
由于永磁同步电机内部电磁关系较为复杂,一般情况下,为了便于计算,通过简化分析,在建立模型过程中作假设如下[14]:
(1)忽略电机定、转子铁心磁阻,不计涡流和磁滞损耗;
(2)转子永磁体导电率为零,永磁体内部磁导率与空气相同;
(3)转子没有阻尼绕组;
(4)永磁体产生的励磁磁场和三相绕组产生的电枢反应磁场在气隙中均为正态分布;
(5)稳态运行时,相绕组中感应电动势波形为正弦波。
则dq 两项旋转坐标系下永磁同步电机电压方程如下:

式中:ud,uq——d 轴、q 轴的电压;id,iq——d轴、q 轴电流;ψd,ψq——d 轴、q 轴磁链;Ld,Lq——d 轴、q 轴电感;ωr——转子的电角速度;ψf——永磁体磁链;p——电机极对数;Te——电机电磁转矩。本文选用表贴式永磁同步电机,表贴式永磁同步电机的定子电感Ld=Lq=Ls。
2 传统模型预测转矩控制
电机控制系统是连续的非线性系统,为了方便预测控制在电机控制系统中的可实施性,对电机连续方程离散化,以定子磁链为状态变量。根据式(1)—式(3),电机状态空间方程为

单步预测的永磁同步电机转矩预测控制算法流程如下:
(a)测量(k-1)时刻系统状态;
确定变量是指明确实验中的自变量、因变量和无关变量。在自然状态下,造成某一现象的原因可能很多,也就存在多个变量。只有准确地确定变量,才能具有正确的逻辑推理前提,让实验设计有意义地进行下去。一般而言,实验课题中都包含着自变量和因变量的关系,因此只有在明确实验课题的基础上,学生才能很容易确定变量。
(b)通过式(5)—式(7)预测8 个电压矢量作用下k 时刻的转矩和磁链;
(c)通过代价函数式(8)对预测值进行评估;
(d)输出最优电压矢量。
3 扩展电压矢量下的两步预测
3.1 扩展电压矢量
增加备选选项是提高预测精度的有效方法之一,将相邻的2 个有效电压矢量进行组合,以在一个周期内各作用一半时间的方法进行矢量合成,可以得到额外的6 个扩展电压矢量[17-19],如图1 所示,再加上原有的,在进行预测控制时,将备选的电压矢量数量增加至14 个,如表1 所示。经过计算,扩展出来的6 个电压矢量的幅值为原有基本矢量的0.866 倍[20]。通过增加不同方向不同幅值的备选电压矢量,会带来更好的控制效果,使控制可以更加精准。
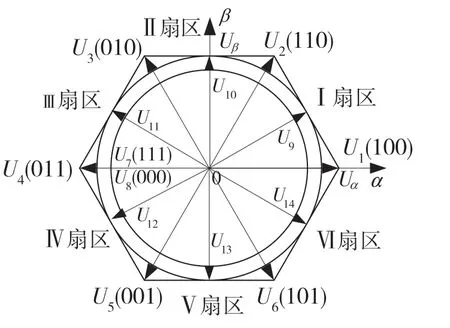
表1 扩展电压矢量表Tab.1 Extended voltage vector

图1 扩展电压矢量示意图Fig.1 Schematic diagram of extended voltage vector
3.2 两步预测和矢量筛选
采用两电平逆变器,在传统单步预测中需进行8 次预测计算,两步预测需进行64 次预测计算[21]。为减少计算量,扩展矢量两步预测步骤如下:
(a)测量k 时刻系统状态;
(b)通过式(5)—式(7)预测14 个电压矢量作用下(k+1)时刻的转矩和磁链;
(d)利用预测的(k+1)时刻的值,并通过开关频率选择对(k+2)时刻转矩和磁链进行预测;
(e)利用代价函数评估并输出最优矢量。
在由(k+1)预测(k+2)时刻的过程中,如果(k+1)时刻选择传统电压矢量,则根据开关频率最小化原则,下一步预测时选择部分电压矢量,如果是扩展电压矢量,则在对(k+2)时刻进行预测时不进行矢量筛选,选择使代价函数值最小的电压矢量。例如(k+1)时刻的预测值是由U1(100)预测而来,则在对(k+2)时刻进行预测时,不对U3(010),U4(011),U5(001),U8(111)进行预测计算,以此减少预测系统的运算量以及降低逆变器的开关频率。控制流程图如图2 所示。

图2 永磁同步电机预测转矩控制系统框图Fig.2 Block diagram of predictive torque control system for PMSM
4 系统仿真研究
本文以表贴式永磁同步电机为研究对象,进行基于扩展电压矢量的永磁同步电机预测转矩控制仿真建模,仿真中所使用的电机参数如表2所示。

表2 电机参数表Tab.2 Motor parameters
仿真实验:给定转速Nref=1 500 r/min,初始时刻负载转矩TL=0 N·m,在t=0.25 s 时,负载转矩为TL=4 N·m。与传统DTC 进行比较,仿真结果分别如图3—图6 所示。
图3—图6 分别给出了扩展电压矢量两步预测下方法和直接转矩控制、模型预测控制永磁同步电机转速、转矩、电流和磁链的比较。例如,位于Ⅰ扇区内,靠近与Ⅱ扇区交界处,需减小磁链,增加转矩,DTC 会选择U3,U3与分界线垂直,此时对幅值调节作用较弱。MPC 会根据转矩和磁链的权重大小选择U3,U4中的一个。扩展矢量U3下的两步预测则会先对U4和U11评估。跨过分界线后,如果上一步中U4价值函数较小,则对U4,U5,U7进行两步预测;如果U11价值函数较小,则对所有矢量进行两步预测,综合评估后输出最优矢量。从图中可以看出,扩展电压矢量两步预测可以有效降低电机转矩和磁链脉动,降低电流的畸变率,使电机转速波动小且稳定。

图3 转速对比Fig.3 Speed comparison
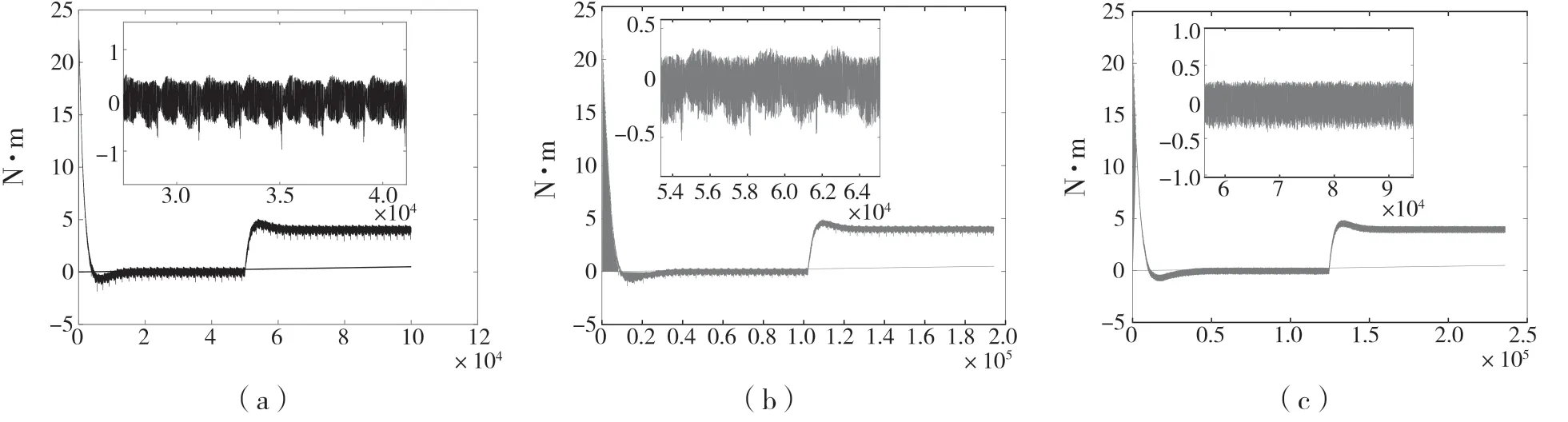
图4 转矩对比Fig.4 Torque comparison

图5 电流对比Fig.5 Current comparison

图6 磁链对比Fig.6 Flux comparison
5 结语
在永磁同步电机中,针对传统直接转矩控制所存在的转矩和磁链脉动大、开关频率不稳定的问题,本文提出了一种基于扩展电压矢量的两步预测控制方法,在传统的8 个矢量的基础上,增加了6 个扩展矢量,使其在预测过程中有了更多的备选选项。针对运算量和开关频率,两步预测可以使开关状态长期保持最优,同时,在两步预测中对矢量进行筛选,降低运算量,有效降低了转矩和磁链脉动,验证了本方法的有效性和可行性。
