基于锁相环的音叉式原子力显微镜测头电路系统研究
2021-04-21李暄妍张富强陈晓梅高超2
李暄妍,张富强,陈晓梅,高超2,
(1.北京信息科技大学 理学院,北京100192;2.中国科学院大学,北京100094;3.中国科学院微电子研究所,北京100029)
0 引言
原子力显微镜(atomic force microscope,AFM)于1986年由诺贝尔物理学奖获得者Binning和斯坦福大学的Quate及Gerber等人合作发明,具有亚纳米量级的垂直分辨力,在空气或液体环境中可以对样本进行测试,弥补了其它扫描探针显微镜的不足之处,是目前研究纳米材料、微器件、半导体器件和生物材料等表面测量分析的重要工具之一,在医学、工业界和科研领域都有广泛的应用[1-3]。
原子力显微镜有多种原理和工作模式,1995年,德国KARRAI和GROBER使用音叉驱动光纤控制光纤尖与物体表面间距,验证了音叉具有很高的品质因数Q和高灵敏度[4]。本文在对音叉式原子力显微镜工作原理进行分析的基础上,设计一种基于锁相环的音叉式原子力显微镜测头电路,并进行试验测试。
1 石英音叉特性及其驱动电路分析
原子力显微镜的工作原理如图1所示。当探针在被测物表面移动产生距离变化时,探针与被测物体表面原子间存在的范德华力等作用力,会使悬臂梁发生变形,通过检测悬臂梁形变可获得作用力分布信息,利用距离与力的关系即可计算得出被测物表面几何形貌信息。
由于石英音叉具有谐振频率稳定、品质因素高等优点,可利用石英音叉做为悬臂梁探针研制音叉式原子力显微镜。石英音叉属于压电器件,当一定频率的交流电信号通过两个电极直接加到两音叉臂时,两臂以相反方相在平面内以同样的频率机械振动,两音叉臂周期性的相互接近和离开[5],石英音叉工作模式如图2所示。

图1 原子间作用力与原子力显微镜工作原理图

图2 石英音叉工作模式示意图
瑞士某公司的A-Probe型音叉式悬臂梁探针把高纯度单晶硅制成的悬臂梁探针与音叉粘接成如图3(a)所示,石英音叉带动悬臂梁探针运动,将音叉臂水平振动转换为探针针尖的垂直往复运动[6-7],如图3(b)所示。

图3 悬臂梁探针工作模式示意图
音叉在电气特性上等效于电阻Rtf,电容Ctf和电感Ltf的串联电路,等效电阻是能量消耗单元,在电路驱动能力设计中应予以考虑,石英音叉的谐振频率主要由等效电容和等效电感决定,计算公式为

石英音叉幅频特性曲线近似于洛伦兹曲线,关于共振频率对称,测得曲线如图4所示。
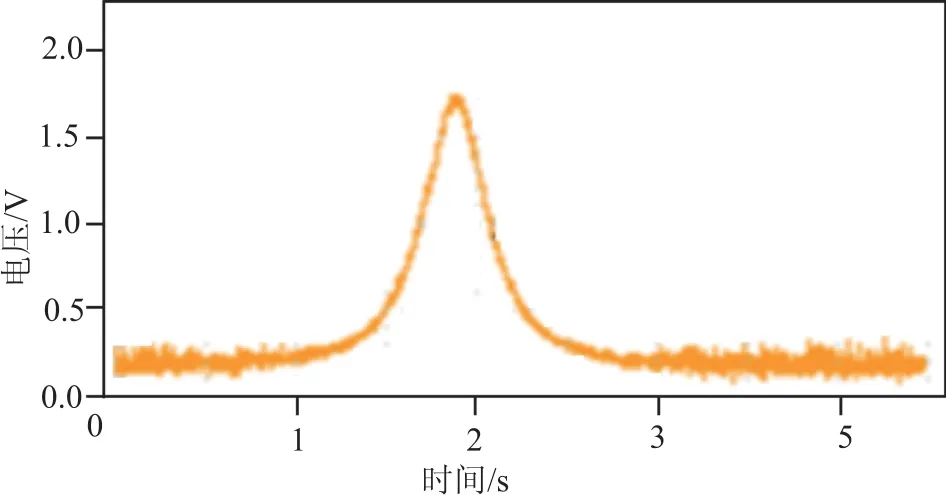
图4 石英音叉幅频特性曲线
探针在物体表面移动时,石英音叉工作在自激振荡模式,利用深度负反馈电路将音叉内部流过微弱交流电流信号转换为电压信号,为保证自激振荡电路工作稳定,音叉自激振荡信号与输出电压信号具有一定的相位差,音叉前置电路及其测试信号结果如图5所示。

图5 自激振荡电压信号
2 基于锁相环的频率调制模式
音叉式原子力显微镜利用石英幅频共振特性,可以工作在幅度调制和频率调制两种动态工作模式下。幅度调制工作模式如图6所示,系统需要独立的信号源激发音叉探针产生共振,当探针接近被测样品表面时,音叉振幅发生变化,引起谐振电流变化,检测电路电压变化即可反映被测物体表面微形貌。幅度调制模式系统结构简单,但由于石英音叉探针品质因数Q值高,测头带宽较小,因此对检测电路的测量速度和系统反馈控制响应速度都有较高要求。
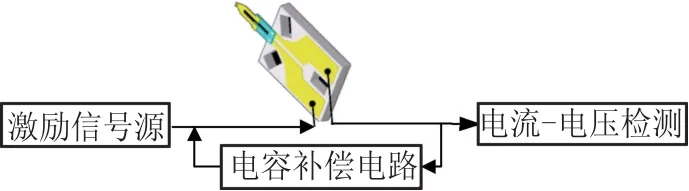
图6 幅度调制工作模式图
锁相环(Phase Locked Loop,PLL)可以实时检测音叉谐振频率变化,将其引入原子力显微镜控制系统,可以实现显微镜在频率调制模式下工作。频率调制测量模式在保证测量精度的条件下,测量速度优于幅度调制模式,频率调制系统工作模式如图7所示。

图7 基于锁相环频率调制工作模式图
石英音叉式带动悬臂梁探针以一定初始共振频率振动,压电陶瓷微位移机构驱动的Z向扫描器带动探针逼近或离开被测样品表面,物体表面高度变化会引起与探针间作用力的变化,从而改变石英音叉共振频率,频差信号经锁相环鉴相器变为直流电压信号,低通滤波器滤除高频干扰信号后,一路电压输入压腔振荡器产生频差信号反馈到鉴相器,另一路电压做为反馈控制Z向扫描器带动悬臂梁探针做离开或逼近的反向运动,使音叉恢复初始共振频率,压电陶瓷的位移量即为该点物体表面微观几何尺寸。原子力显微镜以共振频率变化探测被测样品的微观形貌变化工作模式称为频率调制模式。
利用multisim软件,进行锁相环用于显微镜频率调制仿真验证[10],锁相环调频仿真电路如图8(a)所示。设置压控振荡器的中心频率为25 kHz,直流电压V3=2.5 V。调制电压V4经过电阻R4接入到压控振荡器的输入,R4电阻相当于V4的内阻,压控振荡器输入端电压就相当于低通滤波器的输出和调制电压的总和。在此电路中也可以选用加法器来实现电路功能,但加法器会导致电路更加复杂化,对信号调试造成不便,故选用乘法器。最终得到压控振荡器输出波形及输入调制电压如图8(b)所示,仿真电路实现输出信号频率跟随输入信号进行变化,实现锁相环调频仿真,仿真结果表明锁相环输出的信号频率能够跟随输入信号频率变化,满足使用需求。

图8 锁相环调频仿真试验
经仿真分析并结合A-Probe型探针电气参数,选取某公司CD4046B芯片进行原子力显微镜锁相环驱动电路设计[11-13],如图9所示,芯片自身包含数字相位比较器(PHASE COMPⅡ)和压腔振荡器(VCO),同时利用外部阻容元件(R5,C4)构成低通滤波器,实现锁相环功能。CD4046锁相环中VCO的振荡频率与外围阻容元件的数值有关,图9中R1管脚外接电阻和C1/C2管脚外接电容决定振荡频率范围,R2管脚外接电阻决定中心频率的偏移量,但根据产品手册,三者与振荡频率间并没有准确的数学关系,存在分散性很难精确计算,A-Probe型探针的典型谐振频率为43 kHz,初步选定电容C3=2.2 nF,R2管脚外接电阻10 kΩ,R1管脚串联10 kΩ固定电阻和10 kΩ可调电位器,保证VCO谐振中心频率f0在43 kHz左右,频率调谐范围Δf不小于±3 kHz,可满足石英音叉谐振频率锁相放大使用要求。

图9 基于CD4046B锁相环电路原理图
3 原子力显微镜测头整体系统设计及验证实验
基于锁相环的音叉式原子力显微镜系统结构及实物如图10所示,为保证系统测量稳定性,选用大理石做为工作平台,X,Y,Z三个方向均包括粗动和精动两套位移机构,用于实现快速初始化对准和精密测量。测量过程中,利用当X-Y微位移平台(X-Y扫描工作台)带动样品进行平面运动,Z向扫描器采用压电陶瓷位移平台带动探针探测被测样品形貌,原子力显微镜测头完成对被测物体形貌XY方向栅状(raster)的逐点扫描测量,形成被测物体表面微形貌图,显微镜测头实物如图10(c)所示。

图10 原子力显微镜系统构成示意图
利用音叉探针式原子力显微镜试验系统对周期间隔为300 nm的一维正弦光栅的(4μm×4μm)进行栅状扫描测量,系统采用逐点逐行扫描得到的图像如图11(a)所示,垂直于光栅栅线的某一行形貌如图11(b)所示。由于显微镜系统未进行整体校准,所以未对测量结果进行进一步的不确定度分析。

图11 一维光栅形貌扫描结果
4 结论
基于石英音叉的原子力显微镜具有自激自感应的特点,不需要借助于辅助测量机构,在结构上优于光杠杆式原子力显微镜,尤其适用于狭小空间微小物体形貌的测量。本文结合A-Probe型石英探针分析了基于锁相环的音叉式原子力显微镜探头电路系统结构,并利用音叉式原子力显微镜对一维光栅进行了测量,试验结果表明锁相环电路能够满足音叉式原子力显微镜系统对频率反馈控制的要求。未为满足使用需求,需进一步优化电路参数及图像处理算法,并对系统进行整体标定,提升系统测量精度和稳定性。
