采摘机械手的PLC控制设计
2021-04-14王海旭
王海旭
(四川信息职业技术学院,四川 广元 628000)
0 引言
现代农业工程的智能化程度不断提高,为了避免人力的辛劳和工作效率的低下,农业的电气化和智能化水平正在不断提升。在果实采摘领域,随着现代果园的集中化程度加大,其面积和规模越来越大,传统的人力采摘已经不能适应需求,我们提出基于PLC控制的智能机械手采摘系统。在机械手用于采摘的发展过程中,最初是将工业级机械手直接移植到对果实的采摘,但这也出现了一些问题。比如,工业用机械手一般抓取物件的硬度较大,机械手抓取过程中对物件的破损是不高的,但是用在农业对果实的采摘会出现果实偏软,如不采取一定措施经常会使较软的果实破损,所以我们有必要研究可用于农业果实采摘的机械手设备。我们将通过PLC编程的简易性、对环境的强适应性和可靠的工作性为控制基础,考虑到传统的机械手抓取果实的破损率,提出通过在机械手上加装压力传感检测和数据采集处理系统,进而有效地提高了果实采集的成功率并降低破损率。
1 基于PLC的采摘系统设计方案
采摘机器人的设计以PLC可编程逻辑控制器作为主控单元,PLC通过接收来自数据采集卡的数字量输入信号,通过内部算法输出到伺服驱动器,进而驱动伺服电机,带动机械手移动到指定位置进行夹取果实的动作,在机械手夹取的过程中,我们在机械手上设计了不少的传感网络,通过这些传感器组件使机械手进行位置判断并在夹取过程中进行压力判断,当夹取如草莓此类的软性水果时,我们可以通过计算机设置对应阈值,让机械手检测到足够压力时调整电机力度,使之既可以夹取草莓又不会夹坏导致破损。如图所示为基于PLC的采摘机器人控制系统图。

图1 基于PLC的采摘机器人控制系统图
2 通讯接口设计
该控制系统在传感器的数据接收端采用数据采集卡,通过USB与计算机进行通讯连接。我们通过LabVIEW进行数据处理,并且将计算机作为上位机,与下位机的PLC进行通讯连接,同时我们对比了几种PLC下位机的通讯方式,提出3种通讯模式。首先,对于PLC来说,最简单最直接的通讯方式就是I/O接口控制,这种方式必须要在计算机端安装I/O卡,而且不能将LabVIEW的数据传送给PLC。其次,可以进行AD控制,但是在计算机测也必须安装AD卡,同样不能把LabVIEW的数据传送给PLC。最终我们通过给PLC加装串口模块的RS232串行通讯方式进行,因为这种控制方式最为全面。
3 采摘机械手的传感网络设计
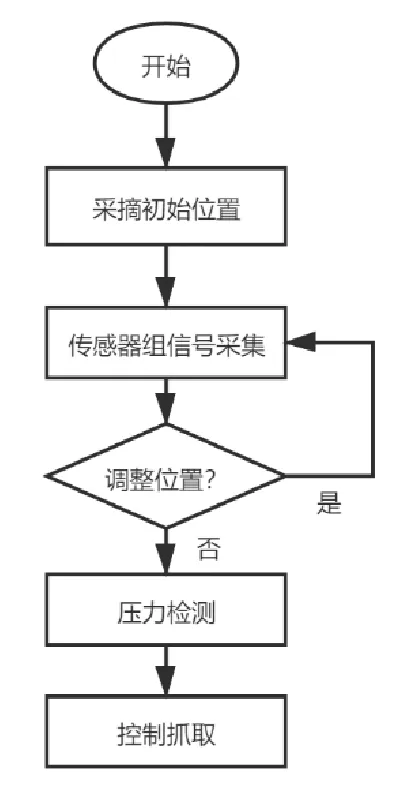
图2 系统控制流程图
为了实现采摘机械手的自动化作业,需要对机械手的执行末端进行软硬件设计。在系统初始时刻,机械手进入初始位置并通过传感器组件开始采集信号,判断果实的大小和颜色进行位置定位后开始采集,如果位置出现偏差,则重新输入新的传感器采集信号,然后调整位置进行果实抓取,当抓取到果实之后,机械手握力面的压力传感器进行实时压力检测,压力过大则减小握力,过小不足以抓下果实就增大握力,最后在系统的控制之下抓取果实放入果篮回收。
该系统主要包含了4个部分,分别为传感器网络、PLC控制、伺服系统和伺服电机。传感器网络按用途分,又有位置判断、成熟度检测和压力检测3种,我们通过压力检测部分看看该系统是如何降低破损率的。首先,我们的装置在进入初始状态时会设定一个夹取的压力定值,该值由果实类型设定,比如草莓这种偏软的水果该压力值就比较小。当机械手的握力面接触到果实时,我们通过设置在握力面的FSR-402压力传感器对握力进行检测,并把检测出的结果和我们之前的给定值进行对比,并不断调节使最终的抓取力度在一个合适的范围内,在保证抓取成功率的同时也降低了果实的破损率。这个过程我们用数据采集卡收集信号,该压力传感器数据采集结构图如图3所示,5V的电压给双端的压力传感器一端供电,该电压可以采用外接电源的方式,由于传感器所需的该电压较小,也可以直接采用数据采集卡的USB接口的上位机供电方式。传感器的另一端为信号线,通过压力的变化会向上位机输出变化的电压,并且该信号线再和输出端并联一个10KΩ的电阻后接地。该采集卡工作的温度范围大,可适应性强,其16/8路模拟量输入通道满足我们的传感器输入要求。最后,数据通过采集卡的USB接口进入上位机,通过上位机的LabVIEW图形化设计语言进行数据与给定值的比较判断后再输出到控制系统进行握力大小的调节。压力传感器数据采集结构图如图3所示。

图3 压力传感器数据采集结构图
4 基于PLC的采摘机械手伺服控制
伺服电机的基本结构实际上和其它形式的电机是一样的,但是它们也有不同点,比如直流伺服电机在换向上就有一定的不同。我们所设计的直流伺服电机的基本原理和一般的直流电机是类似的,我们用伺服驱动器输出的电压信号去控制伺服电机的转动,比如控制机械手的上下左右移动的方向角度和速度。我们选用伺服电机也有其良好的机械特性、响应速度快、控制更精确等等优点。而伺服电机的控制程序也可以用PLC梯形图来实现,PLC的梯形图又最接近继电器控制系统图,用梯形图这种简化了的电路图来表示控制逻辑是相对简单的,比较方便掌握,这大大方便了从事农业机械化的电气工程师的编程思路。
我们通过PLC控制的伺服系统主要通过脉冲的形式,因为伺服电机的工作模式分为2种,即位置控制模式和速度控制模式,如果仅仅是进行速度控制,那么我们就不需要伺服的脉冲驱动,采摘机械手的移动归根到底还是位置的控制,分解成2个物理量也就是对方向和速度大小的控制,也就是说,控制的是采摘机械手在多快的时间维度内到达果实的哪个部位,并且实现准确抓取的操作。要实现这种控制,我们通过PLC输出给伺服系统一个计算后的脉冲,该脉冲包含其特定的大小和频率。考虑到我们会设置人机显示界面调节初始位置、手动设置模式等,我们还要考虑与驱动器的通讯问题,在选用驱动器时,我们需要选择能支持modbus协议的驱动器。通过PLC控制伺服电机的梯形图如图4所示。

图4 基于PLC控制伺服电机的梯形图
5 上位机软件设计
LabVIEW又叫虚拟仪器,被称为“工业界的Windows”,足以体现其地位,它是一款非常适合大量数据进行建模和处理的软件或者方法,由美国国家仪器开发,非常适合追踪大量数据并运算的时候。其编程的图形化、可视化、数据的流程化大大方便了电气工程师的使用,这一点和梯形图有异曲同工之妙。在具备复杂传感器的环境下,有需要将它们集成起来实现特定的功能,那么此时是最能体现LabVIEW威力的时候。
我们的控制系统通过采集卡收集了传感器信号后经USB数据线与上位机相连,经过LabVIEW程序的运算后,在经PLC加装的串口模块的RS232串行通讯方式把LabVIEW运算的结果传送给PLC。
这一过程的难点在于设置接口函数实现通讯,LabVIEW在实现硬件连接时,其本身带有函数库进行硬件的通讯。考虑到我们的传感器信号是实时采集,现场处理数据的情况,所以排除静态连接函数,通过编程只需要调用本身提供的动态函数即可。通过该动态连接函数就可以把采集卡实现USB通讯的.dll的库函数和LabVIEW连接起来,这样就实现了LabVIEW与硬件的通讯。
设置信号处理程序时,主要分为信号的滤波、卷积、比较等等,该部分充分体现了LabVIEW图形化调用的方便性,省去了像C语言那样大量编写程序的复杂。同时我们考虑到小波算法良好的滤波效果,信号的细节也能够很好地保持的优点,再加上直接从库函数中调用高通滤波、低通滤波、卷积的方便性,这些也是实现小波算法的条件,所以我们对信号处理也引入了小波算法。通过设置了高低通滤波器的序列值之后,再将2个滤波后的结果进行卷积后进行抽样实现。信号检测与处理工作原理图如图5所示。

图5 信号检测与处理工作原理图
5 结语
我们通过对采摘机械手的设计,正是适应现代农业机械化和智能化的不断更新和换代。现在市面上还没有功能完善又稳定的采摘机器人的商用,该项研究为了避免人力的辛劳和工作效率的低下,适合农业现代化的有效需求。在果实采摘领域,随着现代果园的集中化程度加大,其面积和规模越来越大,传统的人力采摘已经不能适应需求,我们提出的基于PLC控制的智能机械手采摘系统,该系统以PLC逻辑控制器为基础,我们将通过PLC编程的简易性、对环境的强适应性和可靠的工作性为控制基础,考虑到传统的机械手抓取果实的破损率,提出通过在机械手上加装压力传感检测和数据采集处理系统,进而有效地提高了果实采集的成功率并降低破损率。比如,数据采集卡接受来自FSR-402传感器的信号,PLC再通过接收来自数据采集卡的数字量输入信号,通过内部算法输出到伺服驱动器,进而驱动伺服电机,带动机械手移动到指定位置进行夹取果实的动作,在机械手夹取的过程中,我们在机械手上设计了不少的传感网络,通过这些传感器组件使机械手进行位置判断并在夹取过程中进行压力判断,当夹取如草莓此类的软性水果时,我们可以通过计算机设置对应阈值,让机械手检测到足够压力时调整电机力度,使之既可以夹取草莓又不会夹坏导致破损。通过我们的研究,有利于提高果园经济中的农业机械化水平,自动化采摘机械手的应用可以在减小果实破损的基础上大大提高采摘的成功率和生产效率。