Review of Research and Development of Supernumerary Robotic Limbs
2021-04-13YuchuangTongStudentMemberIEEEandJinguoLiuSeniorMemberIEEE
Yuchuang Tong, Student Member, IEEE and Jinguo Liu, Senior Member, IEEE
Abstract—Supernumerary robotic limbs (SRLs) are a new type of wearable human auxiliary equipment, which is currently a hot research topic in the world. SRLs have broad applications in many fields, and will provide a reference and technical support for the realization of human-robot collaboration and integration,while playing an important role in improving social security and public services. In this paper, representative SRLs are summarized from the aspects of related literature analysis,research status, ontology structure design, control and driving,sensing and perception, and application fields. This paper also analyzes and summarizes the current technical challenges faced by SRLs, and reviews development progress and key technologies,thus giving a prospect of future technical development trends.
I. INTRODUCTION
ACCORDING to the World Labor Statistics database,there are more than 200 000 industrial injuries in recent years [1]–[4]. It would be advantageous if workers could use wearable robots that could support them during the most demanding tasks, while also securing them to dangerous environments to prevent them from falling over [5]. In the past few decades, a variety of wearable robots have been developed and their application has expanded to different fields [6]–[8].
SRLs can perform multiple functions and become an extra leg or arm that can support the human body and assisting in operation. Over the past few years, scientists have developed various types of SRLs. They include using a pair of robotic arms to assist aircraft assembly workers in using heavy tools[5], [9], [10], providing additional fingers to help hemiplegic patients to complete daily chores [8], [11], and using robot arms to coordinate with the user and help them perform complex or fatigued-prone tasks such as perform overhead tasks [12], [13]. In all of these designs, SRLs provide unique physical support to the wearer, opening up new ways to enhance human motor skills. SRLs which are independent of humans in kinematics can provide support without restricting user movement, and their work space can reach areas outside the human reachable workspace [14]–[17]. Recently,preliminary experiments have been carried out to support the human body with SRLs in standing [18] and crawling postures[19], [20]. The solution presented by these previous efforts is to build SRL systems that can seamlessly transition between various enhancement patterns by combining their features.Wearability allows the SRL to always help the user complete their and allows the SRL to become an extension of the human body. They can take advantage of large workspaces and use interchangeable end-effectors to perform every operation needed to assist users [21], [22].
Moreover, SRLs also present some unique challenges.Unlike traditional manipulators, it is not fixed on a specific base. Meanwhile, unlike mobile robots, the movement of its base is not completely controllable or predictable. SRLs are worn by human users who are subject to spontaneous movements interacting with the environment under the constant interference. This means that the SRL system must be able to compensate for unpredictable interference, estimate its own state to reduce interference, and provide robot-like accuracy [23]–[25]. Furthermore, cognitive neuroscientists have been studying the human brain’s hallucinations of external limbs to explore the body’s sense of ownership over tangible and intangible objects. The final test results show that the user can regard an external limb as a redundant limb on their body, which indicates that it is possible to build a SRL that can be regarded as a part of the body, which greatly increases the range of human natural skills and is of great significance for the following research on SRLs [11],[26]–[30].
SRL technology is currently a hot research topic in the world. Scholars from various countries have carried out scientific research work from different perspectives such as ontology structure design, model establishment, perception methods, precise control, and human-robot collaboration, so as to solve existing problems to further improve the safety of operations. However, at present, the overall level of development is still low, and it is still in its initial stages. In this paper,representative SRLs are summarized from the aspects of their ontology structure design, control and driving, sensing and perception and application fields. This paper analyzes and summarizes the current technical challenges faced by SRLs,and reviews the development progress and key technologies,thus giving a prospect of technical development trends.
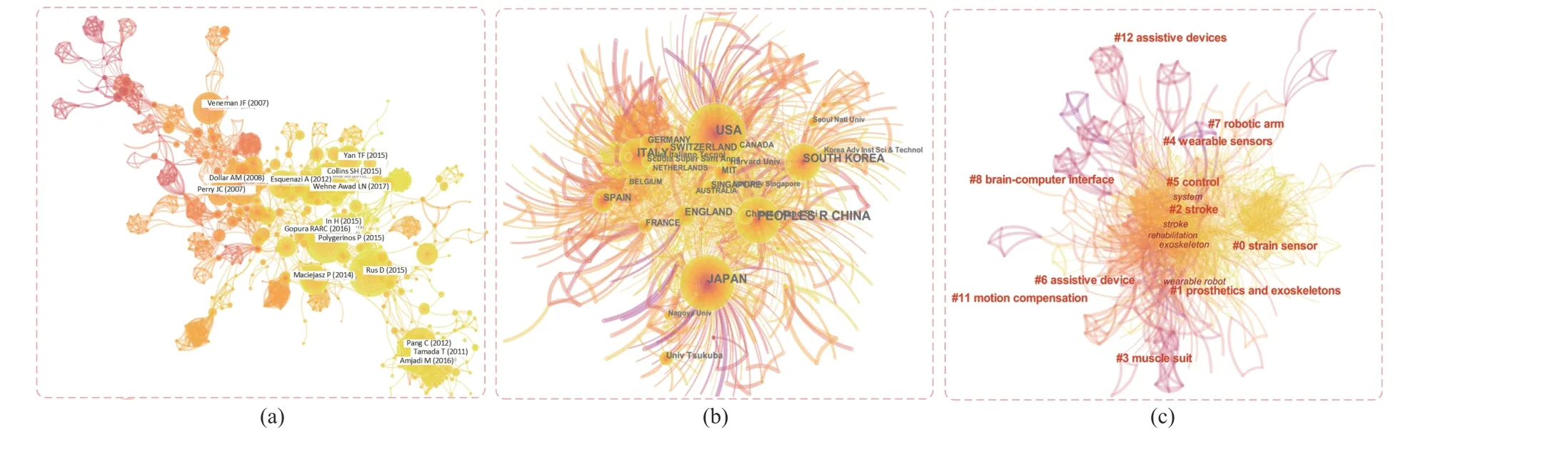
Fig. 1. The mapping knowledge domain of SRL. (a) Co-citation analysis; (b) Country and institution analysis; (c) Cluster analysis of keywords.
II. RELATED LITERATURE ANALYSIS
In the Web of Science database, “supernumerary robotic limb”, “supernumerary robotic finger”, “wearable robotic arm,” and “wearable robot” are used as the search terms and the search scope is “theme”, covering the period from 1991 to 2020. Irrelevant research directions were excluded, with a total of 2194 records were detected. Fig. 1 shows the current research subjects and research hotspots of SRLs. Citespace software was selected as a graphical analysis tool to analyze data from samples. Size of the citation circle can clearly illustrate the tremendous contributions made by different researchers, regions and institutions. Through co-citation analysis and cluster analysis of the samples, different research directions and current research hotspots in the SRL field are obtained. It can be seen from Fig. 2 that the number of papers was no significant difference from 1998 to 2001, and has increased exponentially since 2002 and peaked from 2017 to 2019. This suggests that over the past decade, researchers have begun to focus on SRLs, which shows a trend of vigorous development.
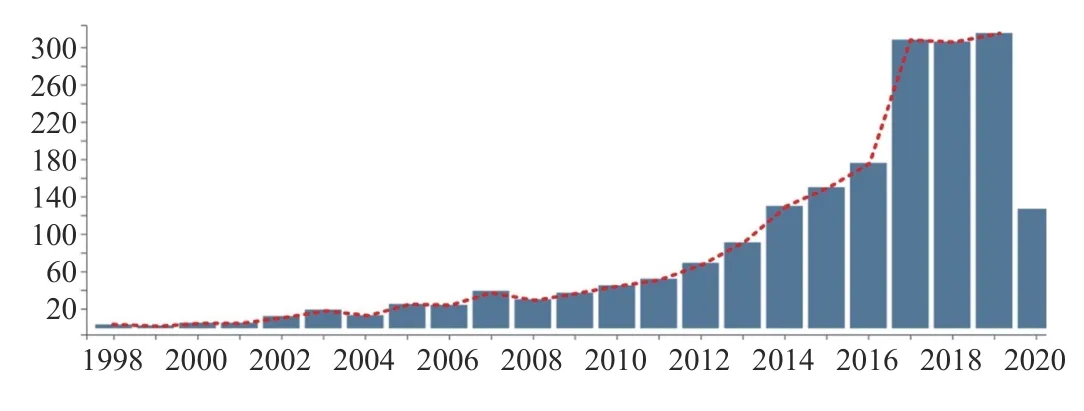
Fig. 2. The number of papers varies with the year.
A. Research Subjects of SRLs
As can be seen from Fig. 1(a), researchers who have made greater contributions to the field of SRLs include Polygerinos P., Dollar A. M., Veneman J. F., Wehne Awad L. N., Rus D.,Yan T. F., and others. As shown in Fig. 1(b), the analysis is based on data from the relevant countries and research institutions. The United States, Japan, and China have the most extensive research in the field of wearable external limb robots, followed by Italy, South Korea, Singapore, Germany,the U. K., and other countries. Harvard University, Massachusetts Institute of Technology, Korean Science Research institutes, Harbin Institute of Technology, and Chinese Academy of Sciences have made outstanding contributions in this field.
B. Research Hotspots of SRLs
The cluster analysis of keywords in Fig. 1(c) shows that SRLs belong to an interdisciplinary field and involve many research fields. Among them, hot research directions that researchers are interested in include strain sensors, prosthetics and exoskeletons, muscle suits, wearable sensors, assistive devices, robotic arms, brain-computer interfaces, and so on.From the analysis of the research field, it is concluded that the researchers are more interested in the sensing, control and human-robot collaboration of SRLs, which further represents the development progress and trends in the field of SRLs.
III. RESEARCH STATUS OF SRLS
SRLs have three main characteristics: they are wearable,independent and versatile. Unlike exoskeleton robots, SRLs are independent of the kinematics of the human body and can compensate for motion defects that do not exist in the human body [20], [31]–[36]. They improve the human body’s ability of movement, perception and operation through the docking and fusion of mechanical limbs and human limbs, mutual assistance and cooperation [22], [37]. At present, SRLs are mainly divided into supernumerary robotic limbs and supernumerary robotic fingers according to the structure of the body, which are widely used in various fields. Research on SRLs originated in 2012. Massachusetts Institute of Technology (MIT) conducted the earliest systematic theoretical research on SRLs [18], [19], [36], [38], [39]. Other research institutions in the United States, China, Japan, and other places have carried out preliminary research on the practical application of SRLs [14], [37], [39]–[64].
A. Supernumerary Robotic Limb
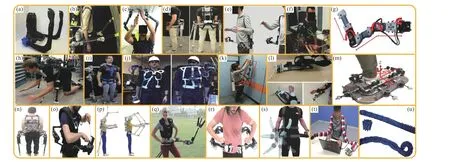
Fig. 3. Different supernumerary robotic limbs.
Supernumerary robotic limbs (SR limbs) can perform multiple functions and become an additional leg or arm that supports the human body and assists operations. SR limbs provide unique body support for the wearer and open up new ways to enhance human motor skills. Kinematically independent SR limbs can provide support without restricting a user’s movement, and its workspace can reach beyond the human accessible workspace. Wearability allows for SR limbs to help users to complete tasks well all the time, where the limb becomes an extension of the human body. They can also take advantage of a large work space and use interchangeable end-effectors to perform all operations needed to assist users.
MIT has always been used in the study of SRLs. Asada’s research team is the first to carry out relevant studies on SRLs in the world. In order to be able to solve the human body load problem caused by the long-term execution of complex and precise installation operations by technical workers in the aircraft manufacturing environment, they put forward the design concept of a SRL and carried out a series of research work [3]–[5], [16], [18], [19], [36], [38]. The team designed a wearable SRL, which is composed of two independent robotic arms and can act as an arm or leg to help the wearer locate objects, lift heavy objects and maintain balance [18], [19],[36], as shown in Fig. 3(a). The purpose of this SRL design is to increase the wearer’s strength and accuracy when performing operations, expand the wearer’s operating range,and reduce the wearer’s workload. Parietti et al. [5], [38]further improved the waist wearable SRL, as shown in Fig. 3(b).The device is applied to aircraft assembly tasks that cannot be effectively performed by conventional industrial robots.Asada’s team [58] proposed a SRL which is used to assist the wearer to perform tasks in the overhead work space, and can actively cooperate closely with the wearer, thereby reducing the wearer’s workload. Later, they also designed the SRL,which can help manufacturing workers to complete tasks safely, comfortably and stably in a dangerous environment or while maintaining an uncomfortable working posture [3], [4],as shown in Fig. 3(d).
In the U.S., Kurek and Asada [20] developed a prototype SRL for near-ground operations, as shown in Fig. 3(h).Gonzalez and Asada [33], [65] developed a SRL which was mainly used to assist nuclear waste disposal personnel in their operations, as shown in Fig. 3(i). Bright and Asada [66]designed a SRL, which had a stronger adaptability to the object being grasped, as shown in Fig. 3(j). Vatsal and Hoffman [64], [67] designed a SRL that was light in weight,capable of telescopic movement, and had certain crawling abilities, as shown in Fig. 3(l). Gopinath and Weinberg [40],[46] designed a drum SRL which could interact with the wearer by receiving corresponding musical messages, as shown in Fig. 3(f).
Other countries have also carried out a lot of research works. Sasaki et al. [50], [51], [68] developed a SRL based on motion signal control of legs and feet, as shown in Fig. 3(e).To reduce the quality of the SRL, Ciullo et al. [69] designed a prototype SRL, which adopts the idea of active and passive combination and consists of a passive gravity compensation arm integrated with a dexterous hand, as shown in Fig. 3(o).Kojima et al. [70] designed a SRL, named the assist oriented arm (AOA), which also adopts the idea of combining the active and passive, as shown in Fig. 3(k). Shin et al. [71]–[74]also developed a SRL prototype for ceiling work, as shown in Fig. 3(g). Srinivas et al. [75] proposed a multipurpose supernumerary robotic limb (MSRL) for industry. Huang et al.[24] designed a four degree-of-freedom (DOF) SRL foot interface for controlling robotic surgical instruments, as shown in Fig. 3(m). Gourmelen et al. [22] introduced a simple user interface for a large number of SRL systems, as shown in Fig. 3(r). Veronneau et al. [25] designed a remote start 3-DOF SRL equipped with 3 finger claws, as shown in Fig. 3(q). Zhu et al. [57], [59], [62] designed a wearable reconfigurable SRL with differential joints, with a series and parallel structure to better adapt to different mission requirements, as shown in Fig. 3(p). Hao et al. [14] designed a SRL, which was designed to assist humans in handling loads, as shown in Fig. 3(n).

Fig. 4. Different supernumerary robotic fingers.
With increase in requirements for dexterity and weight of SRLs, research institutions in various countries have conducted research using soft SRLs. Liang et al. [76]proposed a pneumatically driven fabric-based soft SRL for SRLs, as shown in Fig. 3(u). Nguyen et al. [77]–[79] proposed a soft SPL for daily activity assistance, which could lift an object 2.35 times its own weight, as shown in Fig. 3(s). Al-Sada et al. [80] proposed a versatile serpentine SRL, named the Orochi, which was designed in the shape of a snake, with the characteristics of being very lightweight and having high flexibility, as shown in Fig. 3(t).
B. Supernumerary Robotic Finger
Supernumerary robotic fingers are a type of SRL that imitate fingers, which can work cooperatively with human hands or arms to implement functions such as gripping objects and improving operation ability [44], [81].
Wu et al. [82], [83] designed a rigid supernumerary robotic finger, i.e., SR Fingers, as shown in Fig. 4(a), to help assist patients after amputation and stroke to maintain an independent life with the ability to operate with only one hand. Leigh et al. [84] designed a supernumerary robotic finger, which consisted of 11 mechanical joints and can be adapted to different tasks, as shown in Fig. 4(b). Guggenheim et al. [23] designed a highly redundant supernumerary robotic finger, as shown in Fig. 4(g). Prattichizzo et al. [48] proposed a 4 DOF modular sixth-finger which expanded to enhance the wearer’s grasping ability, as shown in Fig. 4(c). Ciullo et al.[21], [69] proposed a supernumerary robotic finger called SoftHand X (SHX), which is composed of a robotic hand, a gravity support system and different sensors used for detection, as shown in Fig. 4(e). Malvezzi et al. [85] designed a supernumerary robotic finger used as a compensation and rehabilitation tool for patients with upper limb dysfunction, as shown in Fig. 4(f). Cunningham et al. [86] designed a supernumerary robotic finger, i.e., SR3T to assist piano performance, as shown in Fig. 4(d).
The soft supernumerary robotic finger is a flexible external finger robot that is more flexible, lighter and has more adaptable gripping ability than supernumerary robotic fingers with a rigid structure.
Tiziani et al. [87] designed a pneumatic driven modular variable stiffness supernumerary robotic finger and conducted an experimental test of its auxiliary gripping ability, as shown in Fig. 4(h). Hu et al. [88] designed a soft supernumerary robotic finger driven by a cord and servo motor, as shown in Fig. 4(i). Hussain et al. [43], [49] proposed a soft sixth finger named the Soft-Sixth Finger, which is mainly composed of a flexible finger driven by a cord and a supporting base, as shown in Fig. 4(j). Park et al. [89] designed a robotic orthosis supernumerary robotic finger designed to help the paralyzed hands of stroke patients, as shown in Fig. 4(k).
In summary, Table I is a classification summary of the SRLs currently developed in the world.
IV. ONTOLOGICAL STRUCTURE
In the early stages of SRL development, most researchers converted industrial robot technology into design of SRLs,adopting typical rigid links and classic motor drives [91], [92].However, this type of rigid link-rigid joint robot is limited by its shortcomings such as increased weight, large volume, large power consumption, low load/self-weight ratio and high rigidity, which cannot meet the needs in many fields[93]–[95]. These shortcomings of traditional robots, which are neglected in the field of industrial robots, eventually reappear,even enhanced in wearable robots [96]–[99]. For instance, the heavy weight of SRLs makes the device unsuitable for human carrying, and makes them balance when worn, which also leads to greater inertia, thereby impeding movement and wasting body energy. Their large volume reduces the mobility and flexibility of movement, their rigidity affects comfort and fit, and the high cost of materials excludes low-end customers.Most importantly, the potential failure of these devices, such as excessive power output, could compromise user security[33]. Due to constant issues of rigid SRLs, the study of soft SRLs has been prompted [100]–[103].
Soft SRLs have emerged and are slowly redefining the research and technology of wearable robots [104]–[107]. At present, there are many soft SRL technologies [108]–[111],including those with silicon-based soft pneumatic actuators and robots that are inherently soft due to their high power-toweight ratio, innate flexibility, low cost, and high customization, allows for broader applications in the field of wearable robots [109], [112], [113].
Fig. 5 comprehensively compares the performance indicators of soft SRLs and rigid SRLs with six aspects including function, support capacity, volume and mass, realization, and comfort level and degrees of freedom. The network diagramshows their respective advantages and disadvantages more intuitively. Among them, the boundaries of these areas in the figure are drawn according to the statistics of the performance of all types of rigid SRLs and soft SRLs obtained by investigating a large amount of literature data. From the characteristics of the two types of SRLs shown in Fig. 5, the respective application fields and development prospects can be obtained more clearly and directly. Moreover, combined with Table II, we can obtain the differences and characteristics between rigid SRLs and soft SRLs. As shown in Fig. 5 and Table II, compared with traditional rigid SRLs, soft SRLs have many advantages [114]–[128], including:
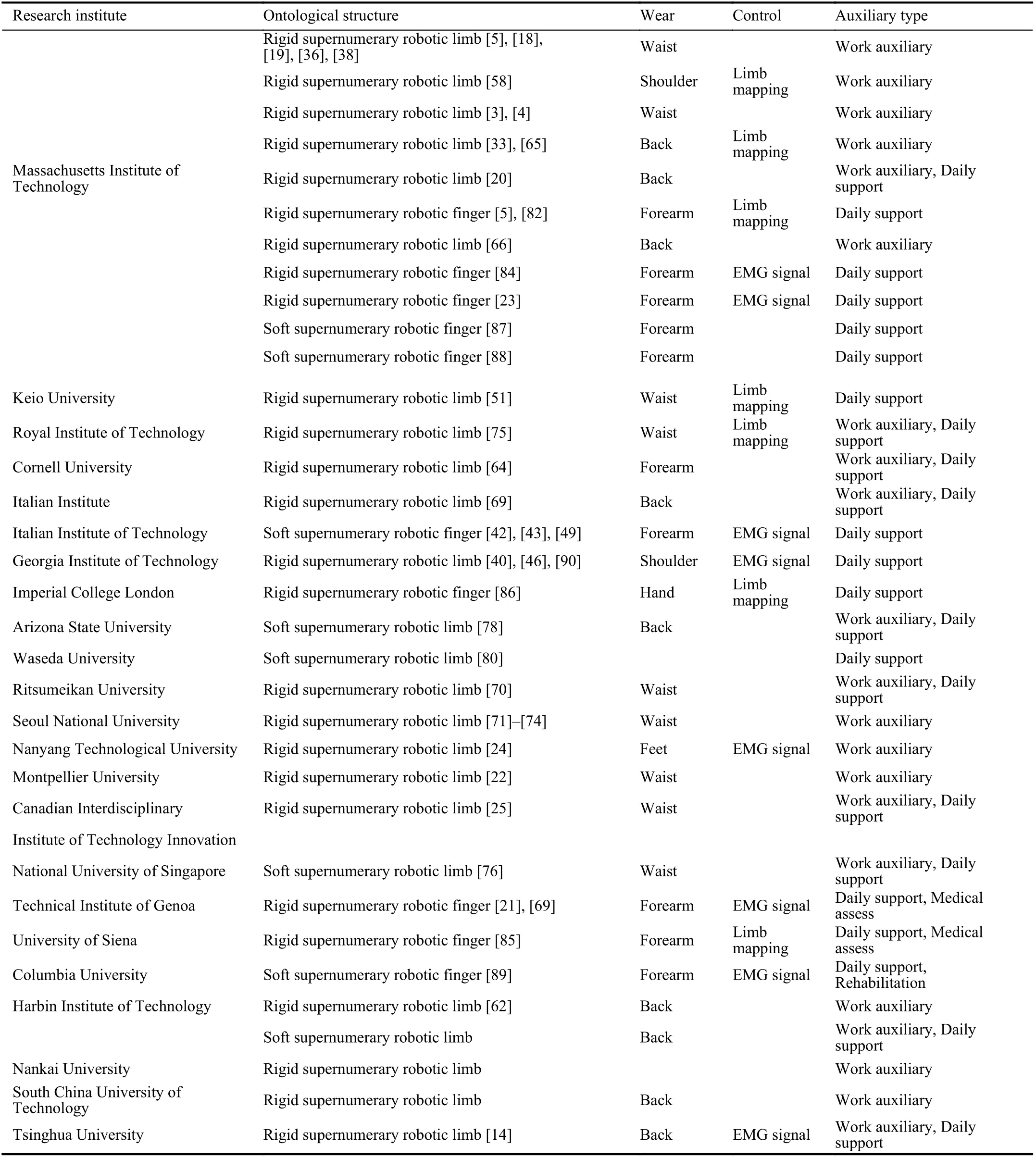
TABLE I CLASSIFICATION OF SRLS
1) Light weight. Less weight on the human body reduces the motion inertia of the extremities;
2) More flexibility. It is easier to adapt to physiological differences and physiological joint changes in different motion modes;
3) The power is more natural, which can provide parallel tension with human muscles or tendons;
4) In terms of social and psychological aspects, soft SRLs are less noticeable, reducing the wearer’s psychological burden.
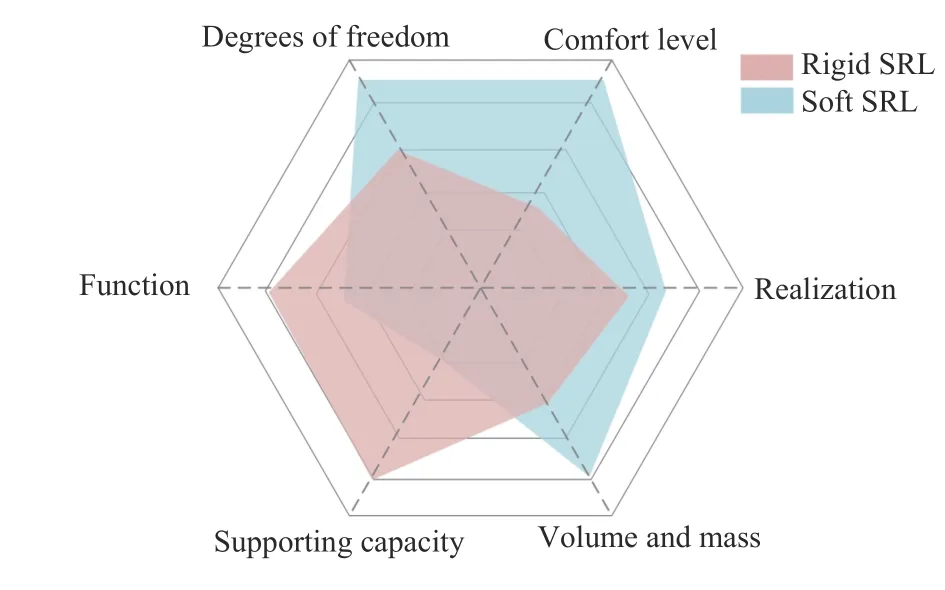
Fig. 5. Comparison of rigid SRLs and soft SRLs.
However, there are certain problems and challenges in current research of soft SRLs, which mainly include the following points [129]–[132]:
1) The stiffness of the SRL driven by pneumatic or artificial muscles is not enough, and the motion accuracy is difficult to guarantee. For this problem, please refer to the discussion in literature [115], [116], [120], [128], [130];
2) Most rope-driven SRLs adopt the method of using a central flexible support, and their load capacity is affected by flexible materials. For this problem, please refer to discussions in literature [115], [121], [125], [129], [132];
3) The size of the SRL determines the flexibility of its movement and the load capacity. For this problem, please refer to the discussion in literature [42], [116], [117], [119],[124], [126], [127];
4) The more joints there are on soft SRLs, the better its athletic ability and accessibility. For this problem, please refer to the discussion in literature [93], [94], [96], [97], [117],[118], [123], [127], [133].
The practicality of SRLs and wearable comfort are the main issues that researchers need to think about. The SRL has developed from their initial rigid structure to a flexible structure, and now can be worn from the waist, shoulders and arms. Moreover, soft robots have several benefits over rigid mechanisms–they are lightweight and compliant, and a single casted shape can undergo higher-dimension actuation than the motor modules used in the previous versions [21], [69],[134]–[136]. In the future, SRLs will gradually trend towards a rigid-flexible integrated structure [96], [97], [108], [121]. It is necessary to design reasonable wearable interfaces, improve the load-weight ratio, and improve the comfort of wearing, so that SRLs can have a variety of shape changes, more endeffector tool interfaces, and realize diversified functions [88],[91], [115], [137].
V. CONTROL OF SRLS
Only by adopting reliable and efficient control methods can the SRL achieve better human-robot collaboration and integration, and improve the wearers’ ability to perceive and operate [138]. Leigh et al. [139] discussed the human-robot integration problem of SRLs in the world, and divided the control methods of robot enhancement equipment into direct control, pseudo-projection control, auxiliary control and shared control according to the degree of autonomy. This classification method is relatively general. In this section,current control methods of SRLs are specifically divided into limb mapping control, electromyographic (EMG) signal control and brain-machine interface (BMI) control according to the control complexity. According to their control strategies, they can be divided into an iterative learning control strategy [140]–[147], phase-variable based control strategy [138], [148]–[152], or adaptive oscillator based control strategy [153]–[157].
A. Control Method Classification
1) Limb Mapping Control: Limb mapping control refers to a type of control method that associates the control of a SRL with the wearer’s limb movement or limb position to establish a mapping relationship.
Llorens-Bonilla and Asada [58] proposed a demonstration and learning based control algorithm for the SRL, which can quickly provide the predictive processing of the next action based on the movement signals. Wu and Asada [82] explored two control methods, in which the motion signal of the wearer’s elbow inertial sensor is used to establish a mapping relation with the SRL. In the follow-up study, they also considered the problem of human interference in the application process, and proposed a data-driven latent space impedance control method, which enables the SRL to not only protect the operating objects, but also realize the natural movement of the human body [53]. Srinivas et al. [75]proposed two control methods for multipurpose SRLs, i.e., the master-slave following method and graphical user interface method. The master-slave following method is one where the controller records the human arm movement position and establishes a mapping relationship with a SRL. Sasak et al.[51] proposed a multi-arm interactive system Metalimbs with high-DOF limb motion and control, and established a complete limb mapping control method to achieve high-DOF movement control of the SRL. Tiziani et al. [87] put forward a control method that maps the dorsal flexural movement of the left foot to the vertical movement of the SRL.
2) EMG Signal Control: An EMG signal is the electrical signal associated with the contraction of human muscles. It is an important method for non-invasive detection of muscle activity at present [158]. At present, international researchers mainly use EMG signals that do not interfere with the wearer’s main operation activities to control SRLs.
Parietti and Asada [16] adopted EMG signals from the pectoral and abdominal muscles of the human trunk for controlling SRLs. However, this EMG signal control method of pectoral and abdominal muscles can only control the SRL with 2 DOFs, which has limitations. Therefore, Leigh andMaes [84] used EMG signals from the brachioradialis muscle of the human body (the forearm muscle near the elbow) for SRL control, which does not interfere with normal hand movements. Bretan et al. [90] designed a percussion control method of a drum SRL based on the EMG signals of the extensor ulnar and flexor radial carpi muscles. Hussain et al.[42] devised a smart hat (eCap) that collects EMG signals from the wearer’s frontal muscles, thereby controlling the supernumerary robotic finger. Hasegawa et al. [39], [47], [54]proposed the use of EMG signals of the posterior ear muscles combined with electrical stimulation tactile sensory feedback to control SR fingers. In the follow-up study, they verified that the control effect of the posterior ear muscle was better [159],[160].

TABLE II COMPARISON OF RIGID SUPERNUMERARY ROBOTIC LIMBS AND SOFT SUPERNUMERARY ROBOTIC LIMBS
3) Brain-Machine Interface Control: BMI control is a method to achieve machine control by using human brain wave signals, which has been widely studied by scholars at home and abroad. It makes sense to apply BMI control to SRLs, but the complexity and difficulty are very high. At present, research on BMI control is still in progress, and it has some shortcomings, such as increasing operation load of the human brain, high rates of miscalculations and delay in response [140], [161]. Determining how to improve BMI control of the SRL and how to improve human-robot cooperative control are the main research areas of international scholars. Carmena et al. [162] first demonstrated the feasibility of an invasive BMI in non-human primates.Hochberg et al. [163] first applied it to people with quadriplegia, demonstrating the feasibility of the BMI control.Penaloza and Nishio [164] proposed a method to control the SRL with non-invasive BMI and revealed that the human brain is capable not only of controlling external devices, but also of regulating attention allocation in multi-task situations.
B. Control Strategy
As shown in Fig. 6, the overall control strategy of the SRL system can be divided into three levels: the upper controller(intention recognition), the middle controller (booster planner), and the lower controller [165], [166]. The upper controller is used for the process of human motion intention recognition and state estimation, the middle controller is used for the fusion process of human motion estimation and control strategy to generate the expected motion signal, and the lower controller is used for the precise tracking process of the expected motion signal. Current research difficulties mainly focus on state data fusion of upper and middle controllers and accurate tracking of lower controllers.
1) Iterative Learning Control Strategy (ILCS): ILCS is mainly used for repetitive control tasks. It corrects the control amount at the current time by iterating the control error at a historical time to overcome the interference of unknown parameters in the model, thereby improving the tracking accuracy of the repetitive process [167], [168]. The rope drive can realize flexible transmission, thus reducing the inertia of motion. However, the rope drive has the characteristics of stick-slip motion, which often leads to unknown jitter during transmission. In addition, the one-way rope also has an unknown transmission process similar to gear remeshing, so it is difficult to achieve higher force control precision [169].Due to the aforementioned problems, the traditional control method based on the driver model is difficult to apply, while the ILCS strategy based on history-driven data is a better solution to the above problems. Tucker et al. [146], [166]conducted an experimental comparison of commonly used control algorithms, such as proportional control, damping injection control, and feedforward and model compensation control to the ILCS method, and verified that the best tracking effect can be obtained by the ILCS algorithm.

Fig. 6. Block diagram of human-robot coupling system [165], [166].
2) Phase-Variable Based Control Strategy (PVBCS): The movement of the human body is often a rhythmic behavior,and the process is controlled by a central pattern generator(CPG). Studies have shown that CPG is time-independent in the motion control process, and this process can be fully described by a continuous and unique state variable, namely a phase variable [138]. The phase variables are physical variables [138], [152], [168], [170] that can change monotonously with the limb movement process and fully parameterize the rhythmic movement of the human body.Traditional control strategies include the discrete gait phase control strategy based on a finite state machine, through a predefined variety of different parameters or different control modes [171]. However, this control strategy often depends on the time, and there is no guarantee that controls the amount of continuity. PVBCS can introduce continuous phase variables into the control strategy to solve the above problems. In recent years, the PVBCS algorithm has been widely used in SRLs and has achieved good control effects [149], [151].
3) Adaptive Oscillator Based Control Strategy (AOBCS):
The start and end of movement for SRLs are determined by the intention of the wearer, but the control process should reduce the intervention of human consciousness as much as possible under the premise of not losing control, i.e., to achieve control on demand, so that the AOBCS can achieve the above control effect [172]. Similar to ILCS, AOBCS is mainly used to process periodic motion signals. AOBCS can extract features of the periodic signal and achieve nonlinear reconstruction of the periodic signal, thereby completing the delay-free estimation and synchronization of the periodic signal [154], [172]. Due to the monotonic continuity of the phase characteristics of the periodic signal, phase characteristics obtained by AOBCS can also be used to build control laws or as training features for machine learning algorithms [153], [155]. AOBCS has low requirements for data sources, which has good compatibility with model-based control strategies and model-free control strategies, so it has good research prospects [157]. Liu et al. [173], [174]proposed novel adaptive control methods for nonlinear systems, which brought new ideas to the SRL control problem. Tang et al. [175] introduced an adaptive control method using neural network for the control of nonlinear systems, thereby reducing control errors and ensuring steadystate performance.
In general, ILCS can better solve the tracking problem of the expected signal of the lower controller and improve tracking accuracy. PVBCS and AOBCS belong to the upper and middle algorithm fusion, which blur the line between human movement state recognition and the desired signal generated. These continuous control strategies achieve SRL system control and possess the advantages of simplifying the process control and reduction of the controller parameters.
The topic of the control of SRLs has been explored in automation research, and efforts have been made to define levels of autonomy in master-slave systems. In addition to the three control strategies proposed above, Leigh et al. [139]defined four types of SRLs augmentation control strategies with varying degrees of autonomy according to the above levels, such as direct control, pseudo-mapping, auxiliary control and shared control.
4) Direct Control and Pseudo-Mapping Control Strategy:Direct control and pseudo-mapping are two control methods in which SRLs have no autonomy at all. The former method directly converts the command signal from the operator into the operation instruction of SRLs. For example, SRLs use electromyography (EMG) signals from the user’s forearm to control the robot, while MetaLimbs use the displacement of the operator’s foot for direct drive. The principle of pseudomapping is similar to direct control, because the control of SRLs is generated by algorithm mapping between human actions and SRL actions. Direct control and pseudo-mapping provide a different trade-off between the independence of the movement of SRLs and the control burden imposed on the user.
5) Auxiliary Control Strategy: Auxiliary control describes acontrol paradigm in which the overall movement of SRLs is guided by the operator and the SRLs makes some adjustments according to instructions. The control strategy used in the research of SRLs teleoperation shows its applicability.Remote operating systems often utilize automated control to assist, as the control interface may lack the degree of freedom required to fully control SRLs. SRLs prevents errors in motion by means of adaptive control.
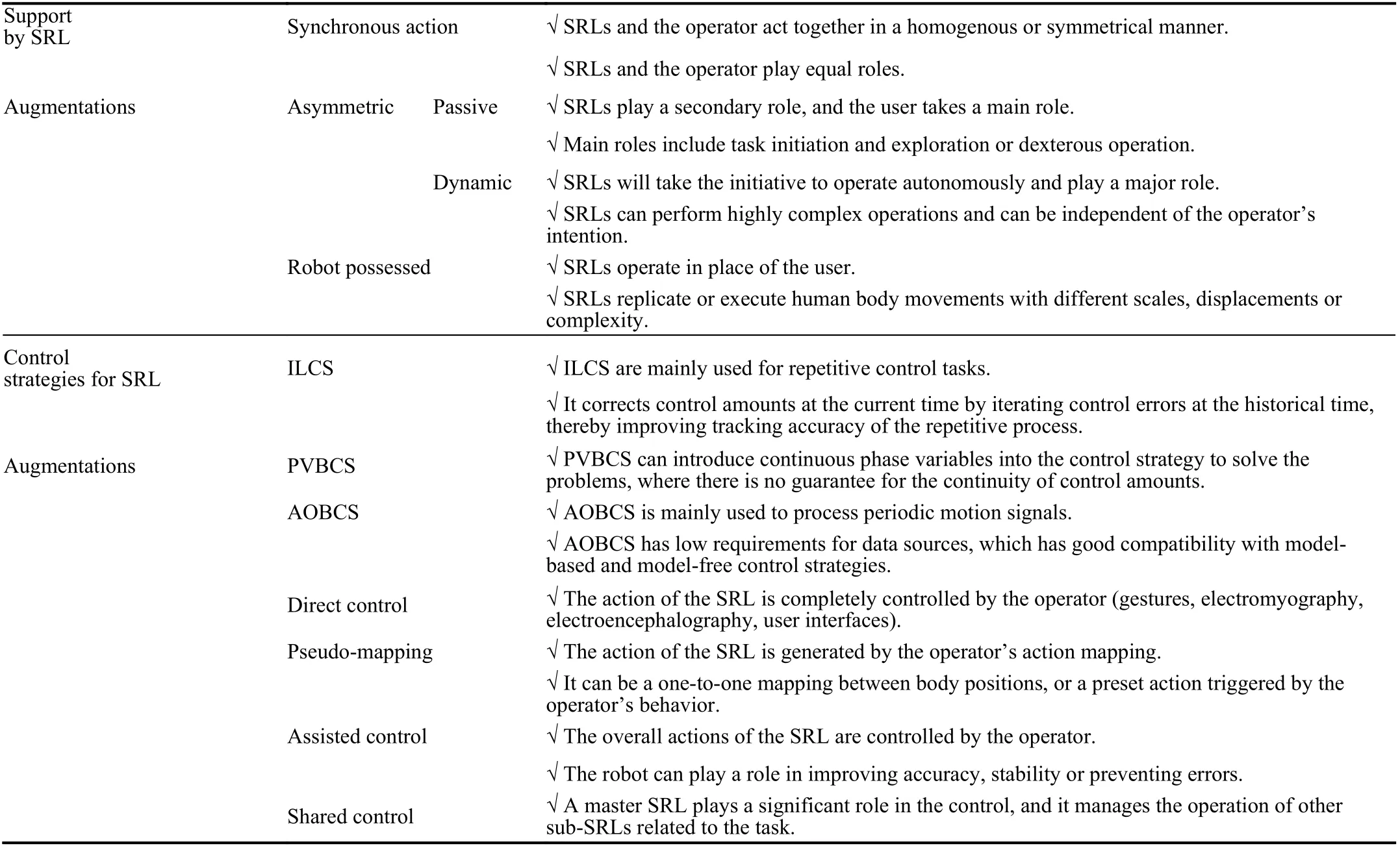
TABLE III TYPES OF SUPPORT BY SRL AUGMENTATIONS AND CONTROL STRATEGIES FOR SRL AUGMENTATIONS
6) Shared Control Strategy: Shared control describes the role that the SRLs system plays in making larger decisions.The SRL decision may require a lot of processing, and a batch of control operations need to be shared from the operator. The shoulder-mounted SRLs discussed in the literature use Petri nets to identify when a user switches from one task to another and to pre-empt the switch to support the upcoming assembly task. In the three-arm drumming system, the generation of rhythmic patterns is completely transferred to SRLs, while human musicians only need to make higher-level decisions about the target drums of SRLs.
These control strategies are not mutually exclusive, and the degree of autonomy is continuous rather than discrete. For example, a system can be implemented to merge multiple control schemes depending on the context of the application or the stage of the task, thereby switching between manual control and autonomic control.
C. Contrast Between the Traditional Method and the SRLs Control Method
As we all know, humans divide tasks performed, where the dominant side of the body plays a more exploratory or manipulative role in the task. Similarly, SRLs can perform operations that are symmetrical to human limbs, and can also perform asymmetric operations that are complementary to human limbs. A new insight in the world is that, SRLs can be more specialized in movement or perception with the apparent preference for dominant limbs in human bidirectional tasks.Therefore, SRLs can assume more independent and proactive roles. Only by adopting reliable and effective control methods,can SRLs achieve better human-machine collaboration and integration, and improve the wearer's perception and operation capabilities.
The SRL system aims to enhance the user’s operating ability by enabling users to operate in a higher-dimensional action space. However, these developments have led to the continuous increase in complexity of the human-machine hybrid system and the corresponding problems of combining SRL control with the human-machine interface. From a control point of view, compared with traditional control methods, the SRL system requires a means to use the lowdimensional control input to carry out high-dimensional control. In order to enable human limbs and SRL to act independently to achieve a series of related goals, it is necessary to formulate control schemes for the coordination and role division between human limbs and SRLs. Current studies on SRL control highlight the close interaction between human limbs and movements of SRLs, in which both participants make control decisions. Such a binary configuration can produce synergies, but it is necessary to pay close attention to coordination issues between them. The case study discusses two major issues that must be addressed when designing a tightly coordinated human-machine integration:the type of support and the degree of control. The different options available for each of these design questions define a framework or taxonomy that can be used to investigate current and future research. Table III summarizes the manipulation tasks that the SRL can support and the possible ways of control shared between humans and the SRL. Table III solves the role division between human and SRLs according to the actual actions and their control.
Another key research issue is human-computer interaction.The physical environment imposes a dynamically changing environment. In the process of collaboration, both humans and SRLs must adapt to changes. In order to form a smooth and continuous collaboration between humans and machines,users need to understand and correctly respond to the behavior changes of SRL. The feedback loop in the human-machine system is a key research topic in the design of the augmented system of the available SRLs. It includes important issues such as how to clearly communicate the intention of the machine to the user, and how the user can become familiar with the robot's behavior over time and develop effective communication with the machine.
VI. DRIVE OF SRLS
A. Active Joints
The active joint of the SRL refers to the structure of the traditional inelastic element joint drive system, through which the design of reasonable control methods helps to realize robot flexibility for the environment and human [176], [177].However, the SRL with active flexibility is still physically composed of rigid elements, and only under the designed control system can it have reliable flexibility. This kind of joint flexibility relies too much on the feedback control of the robot, which has potential safety hazards in the process of human-computer interaction [178]. When it comes into contact with the environment, the continuous deviation between the expected trajectory and the actual trajectory will also lead to the rapid increase of driving force to saturation,which is bound to cause damage to the environment, the operating object, the robot itself, and even the operator/person. Therefore, it is necessary to design the sensor information feedback system and control system for active joints.
B. Passive Joints
According to the differences of flexible components and driving modes, passive joints of SRLs can be mainly divided into three types: motor driven, fluid driven and rope driven.
1) Motor Drive: The principle of motor-driven passive flexible joints of SRLs is to form a series elastic actuator(SEA) which is formed by connecting a flexible element that can have elastic deformation between the output end of the motor and the link at the end of the joint after deceleration[179]–[183]. SEA improves the characteristics of the traditional rigid connection joint with high impedance and insufficient flexibility, but its mechanism is still relatively complicated, and difficult to design and process [184], [185].Meanwhile, SRLs often have weight and portability requirements [186]. However, in the existing research, the internal springs of the serial elastic joints still have design optimization problems including reducing joint structure space and heavy, which affects the overall performance of the serial elastic joints and even the SRL [133], [185], [187]–[193].
2) Fluid Drive: The fluid-driven flexible joint is mainly driven by gas, also known as pneumatic artificial muscle,which is a kind of original actuating part driven by compressed air. Beyl et al. [194], [195] designed an assistance SRL using pleated pneumatic artificial muscles (PPAM).Balasubramanian et al. [196] designed a wearable rehabilitation SRL based on pneumatic artificial muscles.Kadota et al. [197] designed an air-filled pressure sensor that measures the contact force of a SRL driven by an aerodynamic artificial muscle. Wu et al. [198]–[200] used a pneumatic artificial muscle as the flexible drive source of outside body rehabilitation SRL, which further increases the flexibility and reverse driving ability of the joint. However,due to the complex structure of the pneumatic system and its heavy dependence on the existence of an air source, it is difficult to achieve portable and friendly human-robot interaction. Furthermore, it is difficult to achieve precise position and force control of pneumatic artificial muscles.
Other than a pneumatic drive, fluid-driven flexible joints can also be driven by liquid. Stienen et al. [201] combined a planar scroll spring with a hydraulic drive to design a 4-DOF SRL. Although a hydraulic drive also has natural flexibility,the compressibility of a liquid is far lower than that of gas, so its flexibility is far less than that of the pneumatic drive.Moreover, a hydraulic drive requires complex auxiliary equipment, which reduces its portability and application range. In addition, the sealing and leakage of hydraulic components is also an important reason for restricting their entry into the field of SRLs. Therefore, there are few studies on the flexible joints of SRLs using the fluid-driven mode.
3) Rope Drive: A rope drive refers to a transmission method that drives the hinge joint to rotate by pulling a rope, where the rope stretch relies on other original actuators to drive the spinning wheel around the rope to achieve winding and releasing. Vallery et al. [186] designed a set of lower limb SRLs using a rope-driven tandem spring mechanism. Sulzer et al. [202] used a sheath-pull cable drive method to design a SRL by connecting elastic elements in series. Zhao et al. [203]respectively connected a stretched cylindrical spring at both ends of the rope-driven antagonistic connection to form a SEA structure. The rope drive allows the driving source to be placed far away from the joint, which is beneficial to reduce the size of a single joint [135], [136], [204], [205]. However,since the rope can only move in one direction, if you want to achieve multiple degrees of freedom, you usually need to use a recovery spring or multiple ropes [134], which makes the entire system large and complicated. Therefore, it is necessary to carefully control its weight to allow for practical application.
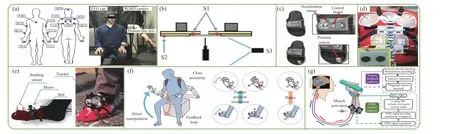
Fig. 7. SRL and sensory feedback system.
4) Comparison of Driving Methods: Through literature research and practical applications, this paper comprehensively compared the merits and drawbacks of a motor drive,fluid drive and rope drive, which are as follows:
i) As for a motor drive, the energy used for the motor drive is simple, the mechanism has a wide range of speed changes,high efficiency, high speed and position accuracy, and has the characteristics including being easy to use, quiet and allowing for flexible control. This type of system does not require energy conversion, is easy to use, and has flexible control.However, most motors need to be equipped with a precise transmission mechanism at the back, which requires a large volume and space, has a high cost, and has a rigid structure which limits their application to soft SRLs.
ii) A fluid drive is a relatively mature technology, which has the characteristics of having large power, large ratio of force to inertia, high quick response and an easy to realize direct drive. However, the efficiency of a hydraulic system is lower than that of electric drive system due to energy conversion.The liquid discharge of a hydraulic system will pollute the environment and create large amounts of noise. Moreover, a pneumatic drive has the advantages of fast speed, having a convenient air source, simple system structure, convenient maintenance and a low price. However, it has the following disadvantages including: difficult to achieve servo control;low working pressure leads to small power-to-weight ratio and large drive device volume; based on the compressibility of gas, it is difficult to ensure high positioning accuracy; large noises are generated from compressed air; the air pressure system is easily rusts.
iii) The rope drive can realize flexible transmission, thus reducing the inertia of motion. Moreover, the rope drive allows the drive source to be placed away from the joint,which is beneficial to reduce the size of a single joint.However, the rope drive has the characteristics of stick-slip motion, which often leads to unknown jitter of transmission.In addition, the one-way rope also has an unknown transmission process similar to gear remeshing, so it is difficult to achieve higher force control precision. Because the rope can only move in one direction, if multiple degrees of freedom are to be realized, it is usually necessary to use a return spring or multiple ropes, which makes the entire system large and complicated. Moreover, the torque of the rope drive is small, so it is mostly used for soft SRLs, which limits its application to rigid SRLs.
VII. SENSING AND PERCEPTION SYSTEM
Developing a sensing system for SRLs to improve proprioception and form self-image has been widely neglected[37]. This section will introduce the basics of a sensing and perception system of a SRL from three components: a mechanical sensor, physiological electrical signal sensor and sensory feedback pathway.
A. Mechanical Sensor
Mechanical sensors of SRLs refer to the encoder for measuring joint position and velocity in the mechanical arm joint, and to the torque sensor for measuring joint force.Commonly used mechanical sensors in the SRL system include: a force-sensitive resistor (FSR) or force-sensitive capacitor (FSC) type plantar pressure sensor [171], [206],inertial sensors (including gyroscope accelerometer, magnetic compass and inclination sensor) [20], [207]–[209], encoder and tension sensor. Moreover, sensors that measure the interaction between the SRLs and the environment mainly include force sensors and camera sensors. The aforementioned sensors can provide stable and effective physical signals for the SRL system, which are used for the human body’s movement intention recognition and movement state estimation. Bright and Asada [66] gave the location distribution map of inertial measurement units (IMUs), which can facilitate the implementation of motion planning of SRLs,as shown in Fig. 7(a)-left. Similarly, this information can also be collected by a camera sensor [210]. Llorens-Bonilla et al.[18] measure the force state of the end-effector with a force sensor and the distance between the end-effector and the plate to be drilled by a camera sensor, as shown in Fig. 7(b).Kojima et al. [211], [212] proposed and compared two modes of operation, which include control via foot posture and thumb pressure, as shown in Fig. 7(c).
B. Physiological Electrical Signal Sensor
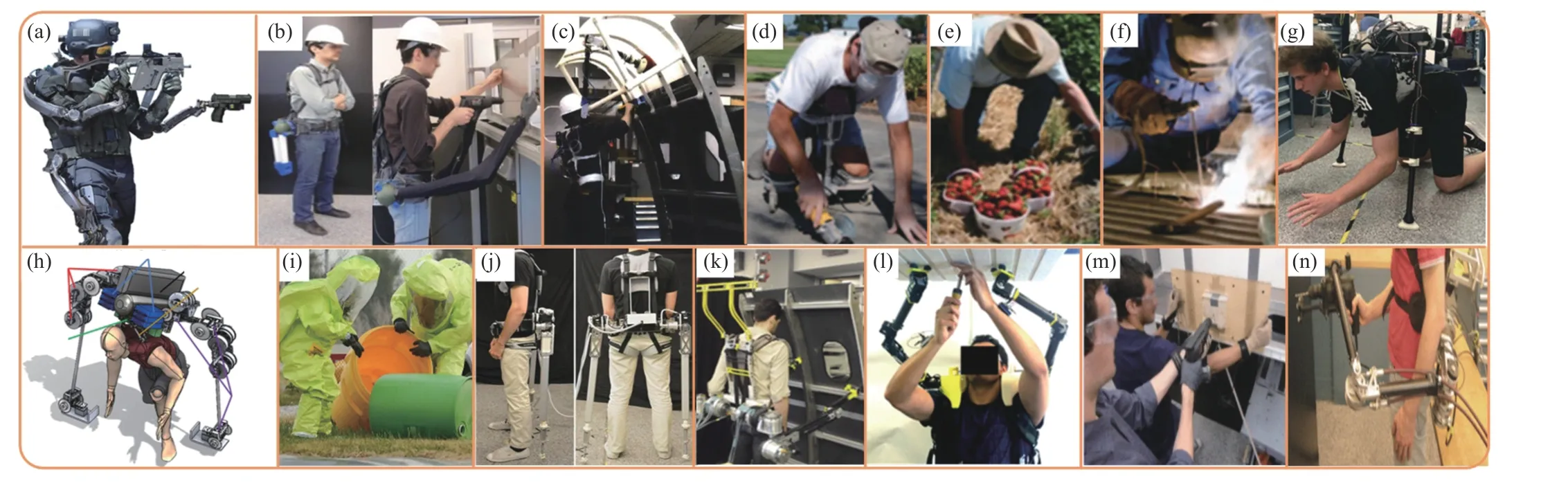
Fig. 8. Practical application of SRLs.
Physiological electrical signals can provide a channel for the wearer to communicate with the outside world and directly represent the movement intention of the human body.Moreover, they can often provide more advanced data information than motion signals, thereby increasing the response speed of the system and enhancing the synchronization performance of the human-machine system. Commonly used physiological electrical signals include the electroencephalogram (EEG), myoelectricity (EMG), and electrooculogram (EOG). In recent years, BMI has attracted much attention in the field of SRLs [213]. Some research institutions have introduced BMI into the SRL system to improve the wearers’ active participation [214]. The European Commission launched the “BNCI Horizon 2020” program,which aims to support BMI applied research [215]. The EMG signal is the myoelectric signal, which can be used to identify the state of human movement [94], [216]–[218]. Since the signal strength of EMG is approximately linear with muscle tension, it can be introduced into the control law setup to generate the desired position and assist trajectory [216], [217].Parietti et al. [3], [16] drives the SRL through the EMG signal system, which is shown in Fig. 7(d). Parietti et al. [16] drives SRL actions through EEG signals (see Fig. 7(a)-right),encodes EEG signals (EEG-based BMI), and controls simple movements of SRLs. Drohne et al. [219] controls the movement of the SRL through the joint of the legs and feet,mapping the leg movements to external limb movements, and the bending of the toes to grasping movements. Figs. 7(e) and 7(f) show schematic diagrams of this sensor mapping.
However, considering the problems of low repeatability and stability of EEG, EOG, and EMG signals, few research institutions directly introduce them into the controller [214],[220]. Therefore, it is generally used for discrete human intention classification, continuous human body state estimation or weighting fusion with mechanical sensors and system models [43], in order to promote practicability as much as possible.
C. Artificial Sensory Feedback Pathway
In practical applications, building a sensory feedback path is a persistent challenge for SRL technology, which has been extensively researched [221]–[229]. Current research can improve accuracy and reduce action time through sensory feedback, so that users can better control SRLs [230]–[232].Furthermore, the purpose of SRLs is to enhance a user’s existing exercise abilities and make up for a user’s lack of exercise ability, not just to enhance their performance. Wang et al. [37] studied the perception enhancement potential of the SRL, especially with the development and improvement of subjective perception resolution. They use BMI to establish a mapping relationship, which can objectively quantify human subjective consciousness and personalized feelings, as shown in Fig. 7(g). Li et al. [233] suggested using vibration feedback on a hand SRL to increase the grip success rate. Zhang et al.[234] studied the physical relationship between the physical parameters of electrical stimulation and the amplitude of event-related potential (ERP), which is of great enlightening significance for current research on the perception feedback of SRLs. If the sensory feedback channel is missing, the wearer will not be able to obtain the following information for completing the operation. Therefore, constructing artificial sensory feedback pathways of SRLs is a key technology to realize and enhance motor ability of SRLs [37].
In summary, there are different methods for obtaining the same kind of perception information. Most of the existing research is conducted on single perception techniques such as posture, shape and force. It is difficult for a single sensing method to reflect the working state of SRLs in complex environment, thus various perception methods have limitations. Therefore, it is necessary to effectively integrate multi-sensing information to ensure the effectiveness and safety of task operations.
VIII. PRACTICAL APPLICATIONS
The SRL has broad application prospects in many fields such as national military defense, industrial production,medical rehabilitation, and life services. This section will introduce its practical application in detail.
A. National Defense Military
In the military field, SRLs can improve a soldier’s individual combat capabilities. As shown in Fig. 8(a), soldiers can assist themselves in stabilizing and supporting guns through SRLs, and reduce the recoil to the shoulder and damage to the upper limbs and shoulder joints caused by vibration. Moreover, SRLs can be used as independent limbs to complete pistol clamping and shooting. In this way, soldiers can repel enemies in different directions at the same.
B. Life Services
In some cases, people need outside support to improve their own athletic performance [221], [235], [236]. For example,Most older people lose their ability to maintain their balance.SRL gives us a new option to assist balance and compensate for human gravity without getting in the way of a user’s arm,which can help the elderly sit and stand safely, and prevent the user from slipping under certain emergency conditions.Because the SRL is worn on the human body, it can help users in any environment, whether on stairs or irregular areas.Therefore, it is especially important to create SRLs to help the elderly and reduce the exertional force [237]–[239]. In daily life, SRLs can be used to assist elderly people to walk, as shown in Fig. 8(j). There are various types of SRLs with auxiliary functions that have been developed for daily behavior assistance, but these robots are still in the research stage [240]–[243].
C. Medical Rehabilitation
The current social phenomenon of aging and declining births in the world is intensifying, thus medical expenses will increase greatly. Meanwhile, the inconvenience caused by diseases will bring great pressure to the society, which results in the need for assistance and rehabilitation, and will cause a shortage of medical resources [244], [245]. Therefore, the introduction of SRLs into daily life activities and medical services will help alleviate this contradiction [246]. Currently,SRLs can be used in the field of rehabilitation, as shown in Fig. 8(j). Some patients with leg or spinal fractures, walking disorders, and neurological disorders (stroke, Alzheimer,Parkinson) need external tools to walk and stand. SRLs can help these patients, so that patient’s limbs can be idle to perform other rehabilitation exercises at the same time.
D. Manufacturing and Industry
In aircraft and ship manufacturing, industry and other industries, workers are often required to perform some complex and fatigue-prone tasks, such as assembling electromechanical systems (see Figs. 8(c) and 8(k)), drilling holes (see Fig. 8(b)), and inspecting the reliability of steel frame structures (see Fig. 8(n)). Moreover, workers often need to work on elevated platforms, which are easy to slip or fall on[18], [36]. Another limiting factor is fatigue or dangerous work environments [36], [137], [247], which makes it more necessary to use the support function of SRLs to help workers reduce fatigue and increase the safety of work. Nuclear decommissioned workers entering areas contaminated by radioactive or other hazardous materials must wear personal protective equipment (see Fig. 8(h)) [33]. Staying in these ergonomically challenging posture for a long time may cause injuries to the lower back, knees and ankles. SRLs can be branched off from the human body and adopt any structural configuration, thereby supporting the human body and providing various auxiliary functions [8], [248]. The goal of SRLs is to help workers perform uncomfortable, dangerous and difficult tasks, as well as to improve work productivity and efficiency in manufacturing and industry. SRLs can provide the user with location references and fix devices and tools to help people perform tasks that require high precision or low interference, as shown in Figs. 8(l) and 8(m).
E. Construction and Agriculture
In the fields of construction and agriculture, certain tasks often require workers to bend over, squat, lie down, knees,and support their arms to stabilize their bodies. As shown in Fig. 8(d), construction workers use rollers and brushes to paint the ground and cut cement. In the same way, the farmers’bending and picking operations (see Fig. 8(e)) and the welders’ bending and welding operations (see Fig. 8(f)) all need require a similar working posture. Fig. 8(g) shows a prototype that assists the human body in bending over. In some special operations, such as nuclear waste clean-up (see Figs. 8(i) and 8(h)), workers will be very tired and the working time is very short. These working postures are very uncomfortable and cause fatigue quickly, and can ultimately cause knee and back injuries. SRLs can provide an effective solution for assisting workers and ensuring their working comfort.
IX. FUTURE DEVELOPMENT TRENDS AND CHALLENGES
SRLs are designed to help people perform physical tasks beyond their normal functions. Therefore, SRLs must have the following characteristics [37]:
1) Lightweight to avoid burdening users;
2) Fast enough to compensate for unpredictable human motion;
3) Strong enough to complete multiple tasks;
4) High force delivery and good control by the user.
The current research on SRLs is currently in its infancy, and there are still many problems that have not been solved, which requires further discussion and research. Fig. 9 shows the current development trend and key technologies of SRLs. By combing through and analyzing the current research works on SRLs, the technical challenges and development trends are summarized in this section.
A. Structural Design of SRLs
Practicality of SRLs and wearable comfort are the main issues that researchers need to think about. The SRL has developed from an initial rigid structure to a flexible structure,while wearable parts developed from being used in just the waist and shoulders to the arms and other parts. In the future,SRLs will gradually develop towards a rigid-flexible integrated structure. It is necessary to design reasonable wearable interfaces, improve the load-weight ratio, and improve the comfort of wearing these devices, so that they can adopt a variety of shapes, have more end-effector tool interfaces, and realize diversified functions.
B. Interaction Control Technology of SRLs
Interactive control technology is one of the current technical challenges of SRLs. Although methods such as limb mapping control are more simple and reliable, they may affect the normal activities of human limbs. The control method of the BMI is the most direct, but is very complicated, and has problems including having as long response time, and are prone to misjudgment. The control mode of SRLs can imitate a human operation mode and form a feedback control system between a SRL and object under the guidance of vision and other information. Increasing the sensory feedback from a SRL will achieve more effective control. Therefore, it will be important in future development trend to make full use of the limited DOFs of the human body, combine multiple sensory feedback mechanisms and various control methods, and realize the bidirectional transmission of information between the human and robot.

Fig. 9. Key technologies of SRLs.
C. Human-Robot Cooperation Technology of SRLs
In the process of SRLs working with people, it is necessary to avoid interference and collision with the human body. With the rise and development of artificial intelligence, SRLs will not only execute simple control instructions, but also have the ability to learn. Therefore, it is a challenge to establish the cooperative working mechanism between a human and a SRL system, form a reliable execution strategy method to ensure safety, and allow for maximum human-robot cooperation efficiency of SRLs.
D. Soft Structure and Soft Drive Design
Current goals for SRLs aim not only to improve the power and accuracy of human users, but also to improve the scope of their skills and their interaction with the environment. The guiding principles of SRL design are safety, transparency and user comfort [19], [23], [33], [219]. The rigid frame of the rigid SRL adds kinematic constraints to the joints of the human body, which may cause discomfort to the user and eventually pain. Therefore, it is particularly important to switch from a rigid to flexible structure design [44], [70], [76],[134], [204]. Determining how to choose appropriate flexible structural materials and driving modes, as well as determining how to design the layout of flexible materials to improve the flexibility and efficiency of the SRL system is the key and a difficult problem that needs to be solved in SRL field [92],[109], [249], [250]. For instance, Fotouhi et al. [116] first designed and implemented a novel hydraulic system that simulates joint flexibility of the single-rigid-link flexible-joint SRL and had the ability to change joint flexibility parameters.Calderón et al. [108] proposed a new type of pneumatic soft SRL system using the basic functional principle of the variant worm.
E. Perception and Recognition of Human Motion Intention
Intention perception and recognition of a human motion is an important technology of the SRL system. Accurate intention recognition can improve synchronization speed between users and SRLs, so as to prevent the SRL from providing positions or power trajectories contrary to the wearer’s intention. For better perception and recognition of human movement intentions, two types of sensors can be used for general implementation: a mechanical sensor and electrophysiological signal sensor. It is one of the key technologies in the study of SRLs to construct appropriate perception and recognition of human motion intentions.
F. Control System Design and Power Strategy Optimization
For the fusion process of a human motion state and powerassisted strategy, the commonly used method is a finite state machine, which switches different control strategies for different motion states of the human body, so as to realize synchronous switching between a multi-state and multicontroller. However, the problem is that such a fusion system relies heavily on the accuracy of human state recognition.Meanwhile, it is difficult to ensure the continuity of control quantity during the switching process with this mode. Thus,the system will cause discomfort to the wearer. Therefore,determining how to achieve efficient integration of the human body state and the power-assisted strategy, how to select the lower controller to accurately track the established curve, and how to completely avoid dependence on the curve are the research areas of interest [167], [251].
G. Booster Performance Evaluation
The evaluation of the assistance performance of SRLs is mainly divided into two types: quantitative indicators and qualitative indicators. Quantitative indicators measure the changes in kinematics and dynamics parameters of the same wearer before and after the assist test [94], [121], [155],[252]–[261]. Qualitative indicators refer to the wearer’s psychological acceptance and comfort level of the manmachine physical interface, which are often evaluated in the form of survey questionnaires [262]–[265]. The early demand for a large number of different patient population data has raised the threshold for the application of machine learning algorithms in rehabilitation assessments [265]–[267].Therefore, an intelligent developmental machine learning architecture should be found that can realize the comprehensive expansion of horizontal and vertical evaluation capabilities.
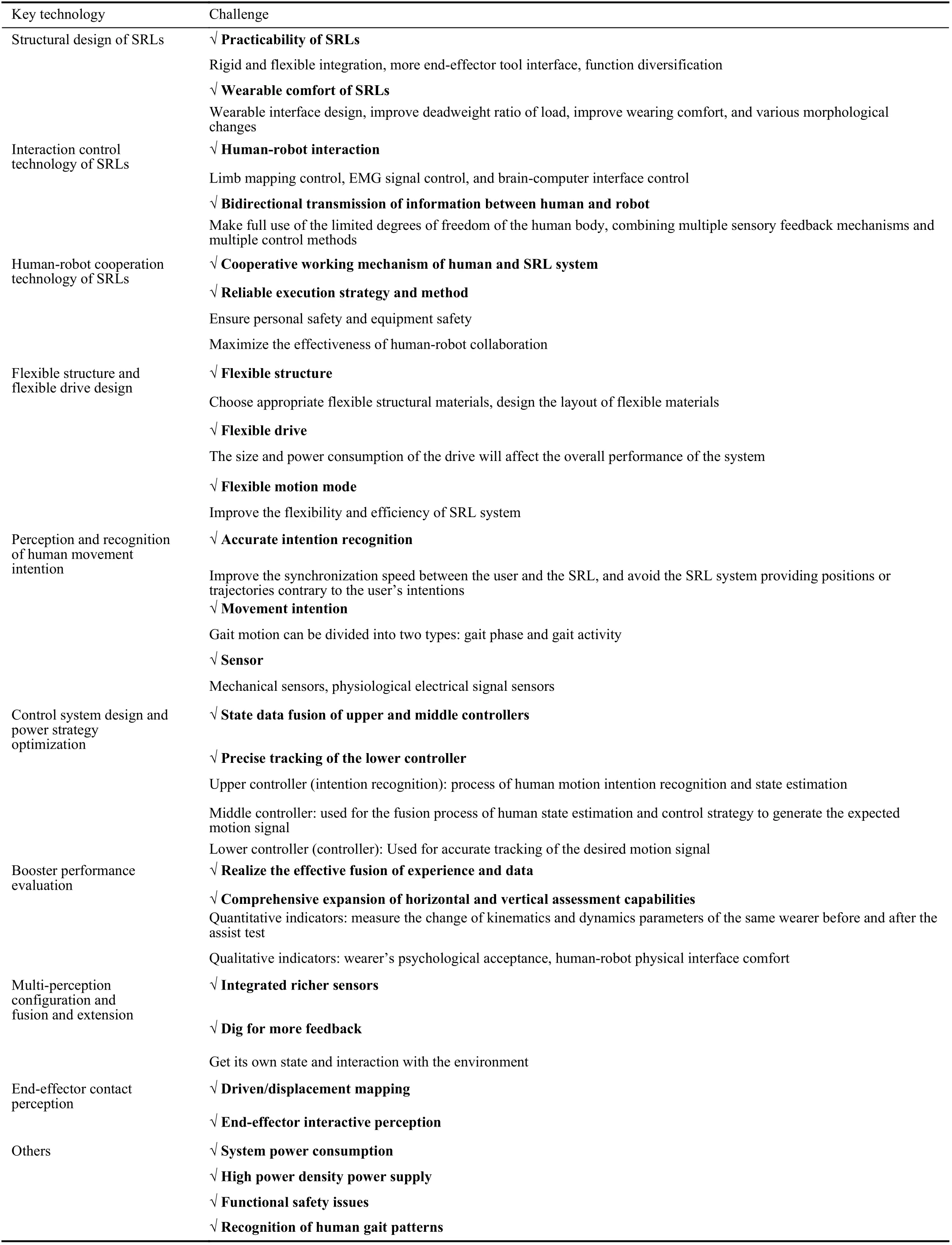
TABLE IV KEY TECHNOLOGIES AND CHALLENGES OF SUPERNUMERARY ROBOTIC LIMBS
H. Multi-Perception Configuration and Fusion and Extension
To achieve accurate closed-loop control of SRLs, one needs to integrate more abundant sensors to obtain its own state and interaction with environment [268], [269]. However, most of the existing studies focus on single sensing technologies such as posture, shape and force. In a complex environment, it is difficult for a single sensing method to reflect the whole working state. However, there are few reports on the fusion of multiple sensory information of SRLs. Moreover, due to the constraints of the environment, size and cost, it is impossible to realize very complete sensing in most cases. Therefore,multi-perception configuration and fusion and extension methods are urgent problems to be solved in the safe and effective operation of SRLs.
I. End-Effector Contact Perception
Due to their elastic structure, SRLs will have a natural force/displacement mapping at its end-effector. The operator hopes that the SRL has different stiffness characteristics in different scenarios, which require to sense for displacement or force of the end-effector in real-time [270]. During operation,the displacement/force perception of the end-effector can distinguish intrinsic contact and load perception for compliant motion control. Researchers have tried a variety of methods to integrate a variety of micro sensors into SRLs, but it is still in its early stages because it lacks specific means for the interactive perception of SRLs.
J. Power Sources of SRLs
System power consumption and high power density of the power supply of SRLs are also aspects that need to be studied and considered to further enhance the portability and practicality of the system. The size, soft and power consumption of the driver and the soft structure will affect the overall performance of the SRL system and their portability and human mobility [169], [177], [271], [272]. In recent years,this aspect of research has attracted much attention from researchers. Kadota et al. [197] introduced a power-assisted robotic arm that uses a pneumatic artificial rubber muscle covered with an exoskeleton suit to mimic the movement of double-joint muscles. Inspired by the biomechanics of the human ankle joint, Farah et al. [179] reduced the energy consumption and power requirements of the motor by optimizing the stiffness of its spring. Grimmer et al. [271]used ankle torque and ankle positive energy to drive SRLs.
K. Reliability and Safety of SRLs
For safety, even though ISO 13482 defines the safety standards for power-assisted robots, it does not consider the functional safety issues in detail, that is, whether the human body can be stable without falling, whether the power-assisted amplitude will harm the wearer, and whether the system can cope with emergencies correctly [194], [236]. By using SRL designed specifically for interaction and collaboration tasks,Haddadin et al. [117] demonstrated how reactive power control strategies can make a significant contribution to ensuring personal safety during physical interaction. Wyeth[184] proposed a variant of the elastic actuator topology,which can improve safety and performance compared with conventional high impedance actuators. Furthermore, it can be analyzed from the aspects of multi-sensor fusion and human dynamics. Moreover, the recognition of human gait patterns is helpful for determining the control and rehabilitation strategies of SRLs and the choice of subsequent rehabilitation performance evaluation methods [266].
Table IV summarizes the current key technologies and challenges of SRLs.
X. CONCLUSION AND FUTURE WORK
In this paper, representative SRLs are summarized from the aspects of related literature analysis, research status, ontology structure design, control and driving, sensing and perception,and application fields. This paper also analyzes and summarizes the current technical challenges faced by SRLs,and reviews the development progress and key technologies,thus giving a prospect of its technical development trends.SRLs have broad application prospects in many fields. Their development will provide reference and technical support for the realization of human-robot collaboration and integration,and will play a pivotal role in improving social security and public services and other aspects. The study of SRLs has just begun, and the field is full of possibilities and challenges,which need to be constantly explored and improved.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Control of Non-Deterministic Systems With μ-Calculus Specifications Using Quotienting
- Decentralized Dynamic Event-Triggered Communication and Active Suspension Control of In-Wheel Motor Driven Electric Vehicles with Dynamic Damping
- ST-Trader: A Spatial-Temporal Deep Neural Network for Modeling Stock Market Movement
- Total Variation Constrained Non-Negative Matrix Factorization for Medical Image Registration
- Sampled-Data Asynchronous Fuzzy Output Feedback Control for Active Suspension Systems in Restricted Frequency Domain
- Predicting Lung Cancers Using Epidemiological Data: A Generative-Discriminative Framework