基于线控转向的智能驾驶车辆路径跟踪研究*
2021-03-25查云飞于淼马芳武郑寻
查云飞 于淼 马芳武,3 郑寻
(1.福建工程学院,福建省汽车电子与电驱动技术重点实验室,福州 350118;2.厦门理工学院,福建省客车及特种车辆研发协同创新中心,厦门 360124;3.吉林大学,汽车仿真与控制国家重点实验室,长春 130025)
主题词:智能驾驶车辆 线控转向系统 路径跟踪 修正系数 变角传动比
1 前言
路径跟踪控制是智能驾驶车辆的核心技术之一,通过控制车辆纵向车速、转向轮转角来跟踪目标路径,使车辆与目标路径之间的横向距离、方向偏差最小化,同时,保证智能驾驶车辆行驶稳定[1-4]。
针对智能驾驶车辆路径跟踪横向控制,文献[5]提出一种基于预瞄信息的路径跟踪算法,通过在目标路径上提取多个预瞄点来获取路径预瞄偏差角,根据偏差角几何关系计算前轮转角,以此减小路径跟踪过程中的横向偏差。文献[6]在综合考虑智能车横向运动特性的基础上,采用纯跟踪(Pure Pursuit)方法设计路径跟踪算法来实现智能车横向控制。为提高分布式无人驾驶车辆路径跟踪精度、转向灵活性、行驶稳定性,文献[7]采用模型预测控制理论计算前轮转角,实现自主轨迹跟踪,并采用PID控制方式,实现差动转向控制,同时,通过设置权重系数将自主与差动转向相结合。上述文献采用相关控制算法研究了智能驾驶车辆的路径跟踪横向控制问题,但均未对车辆横向控制过程中转向系统模块控制特性进行分析。对于线控转向智能驾驶车辆而言,如何更好地发挥线控转向系统横向运动控制优势,提高智能驾驶车辆路径跟踪过程中的转向性能和跟踪精度是一个值得研究的课题。
本文通过汽车动力学仿真软件对车辆转向特性进行仿真分析,找出仿真汽车横摆角速度对转向盘转角稳态增益与理论稳态增益的修正系数,对理论稳态增益模型进行修正,并以此为基础设计单点预瞄模型和线控转向系统变传动比控制策略。基于考虑修正系数的单点预瞄模型和线控转向系统控制策略,设计智能驾驶车辆路径跟踪控制模型,通过仿真分析车辆底层运动执行控制对路径跟踪的影响,以期提高智能驾驶车辆路径跟踪精度和行驶稳定性。
2 车辆模型
2.1 汽车动力学模型
本文采用反映汽车横向运动基本特性的线性二自由度动力学车辆模型,其状态方程为[8]:
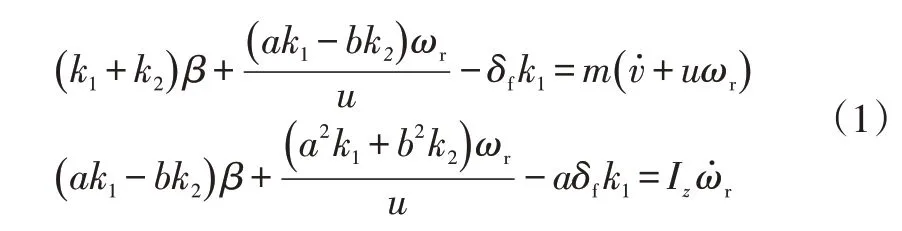
式中,k1、k2分别为车辆前、后轮侧偏刚度;β为质心侧偏角;ωr为转向时的横摆角速度;δf为前轮转角;u为车辆沿X轴方向的速度;m为整车质量;a、b分别为质心到汽车前、后轴的距离;Iz为汽车绕Z轴的转动惯量;v为车辆侧向速度。
2.2 理论稳态增益
当车辆等速行驶时,若前轮转角保持恒定,车辆行驶状态将趋于稳态,横摆角速度ωr为定值,则:

由式(1)~式(3)可以得到理论状态下横摆角速度ωr对转向盘转角δsw的稳态增益:

式中,I为转向盘转角与前轮转角的比值;L=a+b为汽车轴距;为汽车稳定性因数。
2.3 仿真稳态增益
汽车动力学仿真软件包含多种具有高复杂度、多自由度、高仿真精度的车辆模型。通过准确、高效的模型来模拟车辆性能,在一定程度上对智能驾驶车辆算法开发具有一定的指导意义[10]。
基于汽车动力学仿真软件中B、C、D 级3 款车辆模型,分别进行转向盘角阶跃输入下汽车稳态响应仿真,采集不同车速下的,并进行数据拟合。仿真条件:转向盘转角为50°、转向系固定角传动比为16.5、附着系数为0.85、速度依次设置为0、20 km/h、40 km/h、60 km/h、80 km/h、100 km/h、120 km/h[11]。车辆模型主要参数如表1所示。

表1 车辆仿真参数
得到横摆角速度对转向盘转角仿真稳态增益曲线,并与通过式(4)得到的理论稳态增益曲线进行对比,如图1所示。
从图1可以看出,仿真稳态增益与理论增益存在较大差异。为研究二者随车速的变化关系,将图1 中B、C、D级车辆仿真和理论增益曲线进行对比,获得增益比值随速度的变化曲线,并对3款车型的比值曲线进行平均,得到仿真稳态增益与理论稳态增益比值关系曲线,如图2 所示,再利用函数进行拟合,可得仿真稳态增益与理论稳态增益比值与车速之间的修正系数Yb:

由式(4)和式(5)可得仿真状态下横摆角速度ωr对转向盘转角δsw的稳态增益:

3 单点预瞄模型
假设车辆在某一时刻以定横摆角速度运动,运行轨迹如图3 所示,车辆质心位置G点经过预测时间tp后到达C点,两点之间轨迹是半径为R的圆弧,O为车辆轨迹圆心,θ为圆弧所对应的圆心角,ψ为当前车辆航向角。X-Y为车辆坐标系,XGC和YGC分别为车辆在X和Y轴上的位移,Δf为目标路径预瞄点P与智能车辆的侧向偏差,车辆合速度方向GB与汽车轨迹相切于G点[12]。由于车辆质心速度v1在Y轴上的分速度v远小于在X轴方向上的分速度u,所以智能驾驶车辆在X轴方向上的位移XGC≈utp。
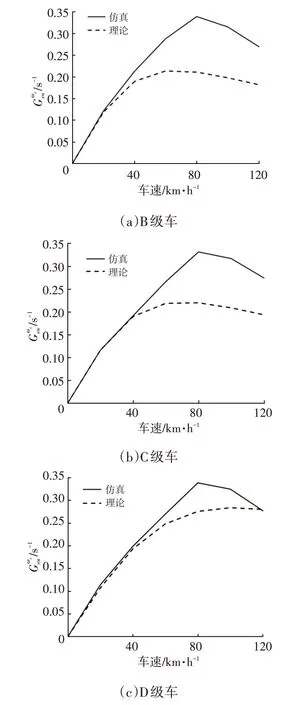
图1 车辆横摆角速度对转向盘转角稳态增益曲线
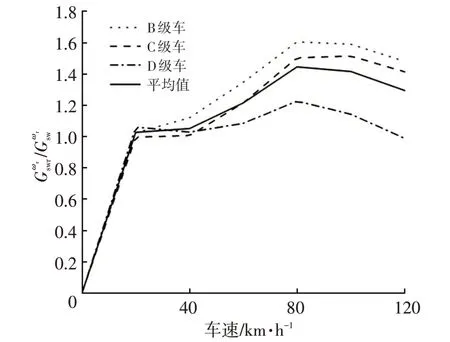
图2 仿真稳态增益对理论稳态增益随车速变化的比值曲线
由图3可得:

图3 恒定横摆角速度下的车辆轨迹
理想状态下,经过时间tp后,图3 中C点与P点重合,∠CGA=∠PGA,YGC=Δf。车辆进行圆周运动时,在预测时间tp后所转过的角度θ=ωrtp,联立式(7)可得:

联立式(4)、式(8)可得理想转向盘转角为[13]:
联立式(6)、式(8)可得仿真稳态增益状态下理想转向盘转角为:

4 线控转向系统模型
线控转向执行模块由转向执行电机、减速机构、齿轮齿条转向器、转向拉杆、转向车轮等组成[14]。线控转向技术具有变角传动比特性,本文综合考虑预瞄式横向运动控制与线控转向变角传动比控制的优势,以期提高智能车辆在期望路径跟踪中的转向性能及精度。
4.1 转向执行电机模型
由转向执行电机的电流与电磁转矩关系、基尔霍夫定律可知:

式中,Tm为转向执行电机电磁转矩;Kt为转向执行电机电磁转矩系数;i为转向执行电机电流;U为转向执行电机两端电压;Kf为转向执行电机反电动势系数;θm为转向执行电机转角;LD为电感;R为电阻。
4.2 齿轮齿条数学模型
齿轮齿条模块数学模型为[15]:

左轮转向组件模型为:

右轮转向组件模型为:

转向执行组件由转向执行电机和减速器组成,其转矩平衡表达式为:

式中,Mr为齿条质量;xr为齿条位移;Br为齿条阻尼系数;Flz、Frz分别为左、右轮传递到齿条的转向阻力;Km为转向执行电机轴扭转刚度;Gm为转向执行电机减速器减速比;rp为转向器小齿轮半径;Tlz、Trz分别为左、右轮回正力矩;Gl、Gr分别为左、右前轮转向摇臂长度;Jm为转向执行电机转动惯量;Bm为转向执行电机阻尼系数。
4.3 线控转向系统变角传动比设计
依据汽车二自由度模型可推导出理论横摆角速度ωr与前轮转角δf的增益:

根据2.3 节的仿真结果,横摆角速度对转向盘理论稳态增益与仿真稳态增益存在较大差异,根据转向盘转角与车轮转角的关系,可得出仿真横摆角速度对车轮转角的稳态增益与理论横摆角速度对车轮转角的稳态增益的关系:

转向盘转角δsw与前轮转角δf的关系为:

横摆角速度ωr与横摆角速度增益、理论横摆角速度增益的关系为:

车辆仿真角传动比为:

由式(20)可以得出,当车速从0 开始变化时,角传动比I过小,易达到转向极限位置,与实际驾驶情况不符,因此设定角传动比最小值为Imin。反之,车辆在高速段过大角传动比会导致响应迟钝,不能及时完成避障、跟踪任务,因此设定角传动比最大值为Imax,车辆转向系统角传动比规律为[17]:

式中,u1=10 m/s、u2=30 m/s为速度阈值。
依据表2中的关键参数,计算出随车速变化的角传动比,如图4所示。
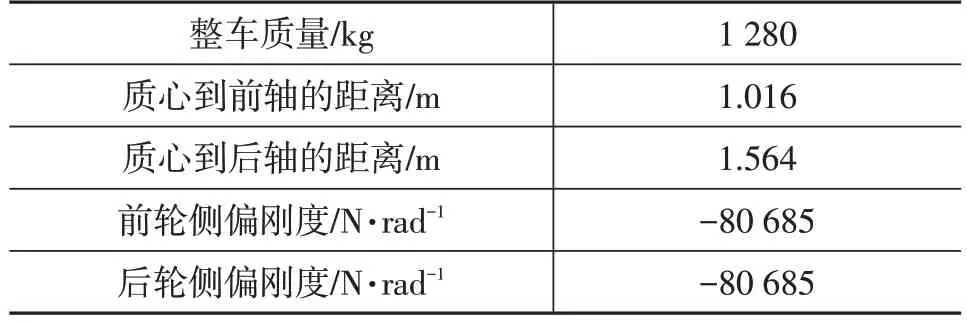
表2 角传动比计算参数
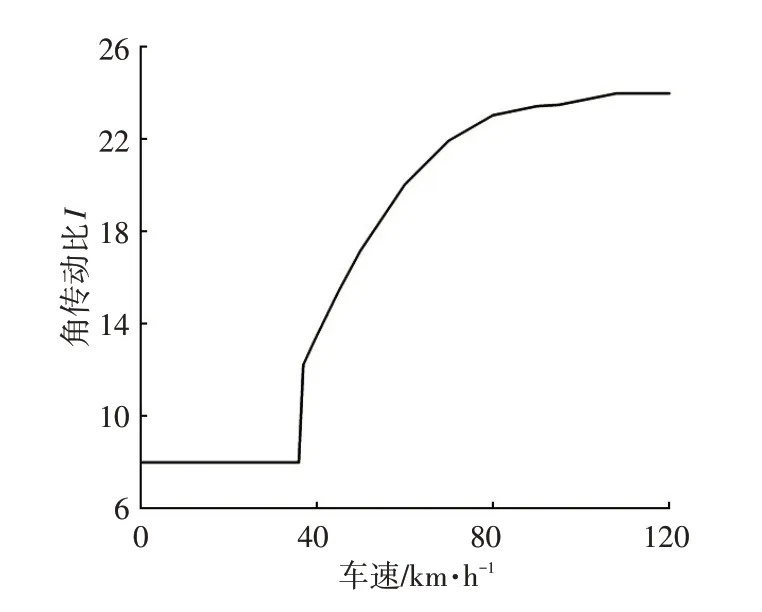
图4 角传动比变化曲线
5 仿真验证
5.1 预瞄模型仿真
为验证所设计单点预瞄模型的有效性,分别设计横摆角速度对转向盘转角理论稳态增益预瞄模型和仿真稳态增益预瞄模型,逻辑框图如图5、图6所示[18]。选用美国联邦公路局为验证车辆转向性能设计的Alt 3道路模型进行仿真验证,预瞄时间为0.8 s,路面附着系数为0.85[19-20],其路径轨迹如图7 所示。车辆选用前文用到的C级车辆模型,以10 m/s、20 m/s和30 m/s的速度跟踪路径轨迹,仿真结果如图8所示。
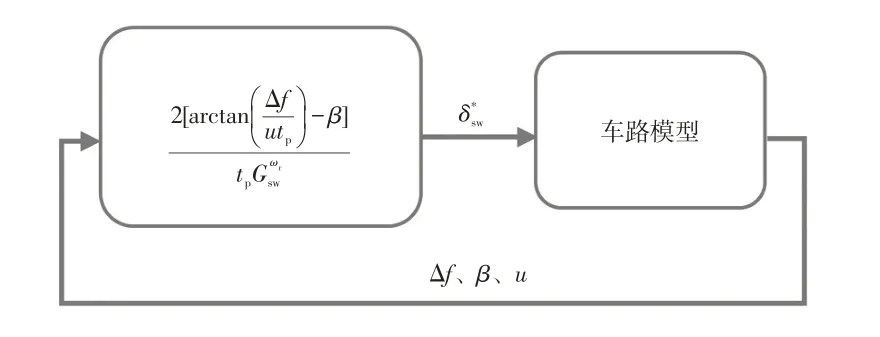
图5 理论稳态增益预瞄逻辑框图
图8 所示为不同车速下仿真与理论预瞄模型横向偏差曲线。从图8可以得出,各车速下仿真稳态增益预瞄模型和理论稳态增益预瞄模型都具有很好的跟踪精度,不同车速下路径跟踪最大横向偏差如表3所示。从表3可以看出,仿真稳态增益路径跟踪最大横向偏差较理论稳态增益路径跟踪小,且速度越高,优势越明显。
图6 仿真稳态增益预瞄逻辑框图
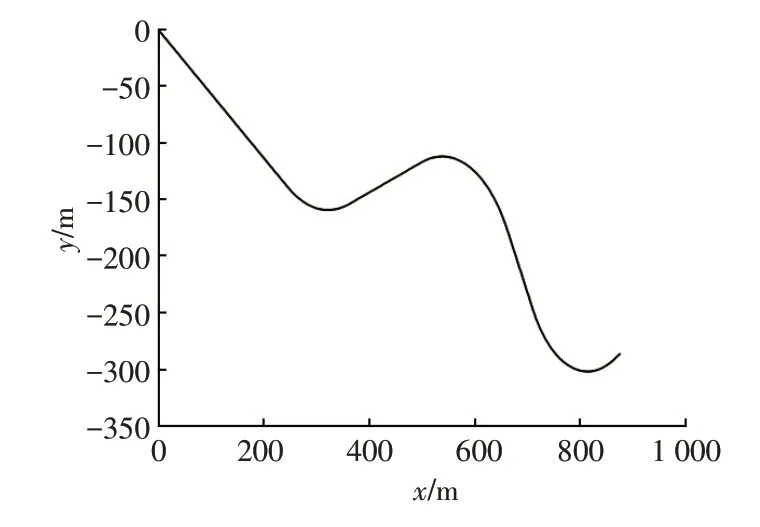
图7 仿真路径

图8 不同车速下仿真与理论预瞄模型横向偏差曲线

表3 不同车速下仿真与理论预瞄模型最大横向偏差
通过预瞄模型仿真可以得出,仿真稳态增益跟踪模型具有更高的跟踪精度。但是,仅考虑驾驶员预瞄模型无法综合体现路径跟踪效果,需要进一步结合转向执行系统对路径跟踪控制展开研究。
5.2 基于线控转向的智能驾驶车辆路径跟踪仿真
5.2.1 智能驾驶车辆路径跟踪控制策略
基于仿真稳态增益设计的单点预瞄模型,展开基于线控转向的智能驾驶车辆路径跟踪研究,整体控制逻辑如图9所示,控制逻辑分为3个逻辑层,分别为路径跟踪决策层、智能车辆状态控制层、线控转向执行层。其中,路径跟踪决策层采用提出的仿真稳态增益单点预瞄模型,状态控制层采用变传动比控制策略,线控转向执行层采用PID电机控制器控制转向电机。
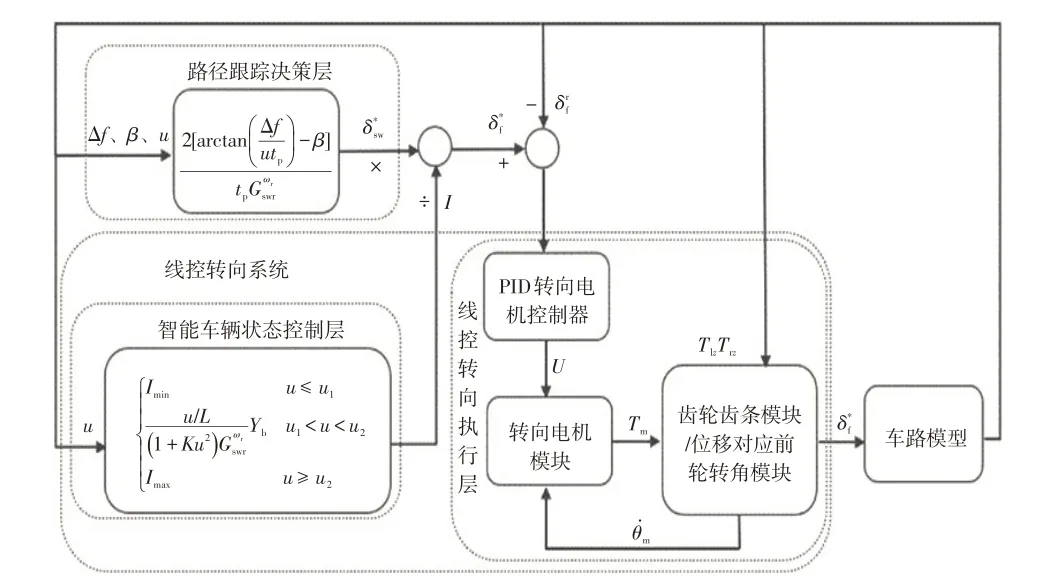
图9 智能驾驶车辆路径跟踪控制逻辑框图
5.2.2 仿真验证及分析
仿真采用与图7 相同的Alt 3 道路模型,预瞄时间为0.8 s,路面附着系数为0.85,选用前文的C 级车辆模型。分别以变角传动比控制策略和固定角传动比进行10 m/s、20 m/s 和30 m/s 的轨迹跟踪仿真,结果如图10所示。
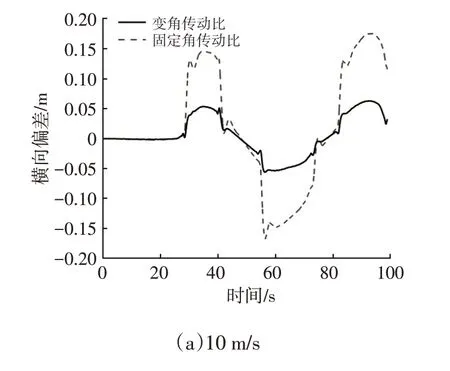

图10 不同车速下基于线控转向的智能驾驶车辆路径跟踪偏差
由图10可以得出,在不同车速下,智能驾驶车辆路径跟踪具有高精确度,在10 m/s 低速下,最大横向偏差为0.16 m,30 m/s高速下,最大横向偏差为0.89 m。针对不同车速采用变角传动比控制策略和固定角传动比控制策略的路径跟踪最大横向偏差如表4所示。
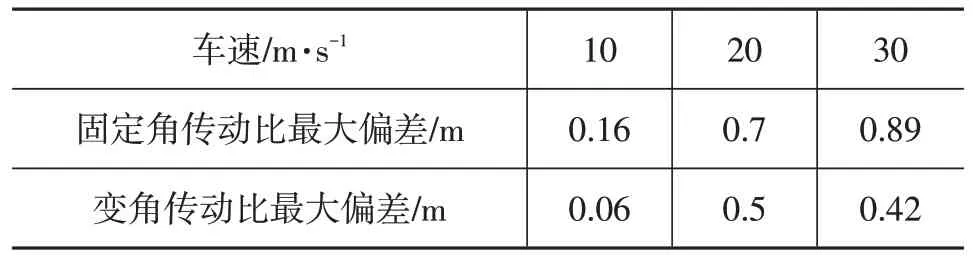
表4 不同车速下基于线控转向的路径跟踪最大横向偏差
从表4可以看出,变角传动比控制策略的路径跟踪精度明显优于固定角传动比路径跟踪精度。在低速和高速条件下,结合线控转向变角传动比的智能预瞄路径跟踪精度均更高。
为了避免车辆高速行驶时失稳的情况,在进行30 m/s 速度仿真时,跟踪车辆质心侧偏角变化情况,如图11 所示。由图11 可以得出,变角传动比路径跟踪控制策略在提高车辆路径跟踪精度的同时,没有增大车辆质心侧偏角,且相对于固定角传动比路径跟踪控制还稍有降低。
6 结束语
本文基于仿真软件实车模型,在不同车速下拟合出仿真横摆角速度对转向盘转角稳态增益关系曲线,得到仿真稳态增益与理论稳态增益的修正系数,以此设计预瞄跟踪模型,并与传统预瞄模型进行仿真对比,验证了该方案的有效性。基于设计的预瞄跟踪模型,提出分层式智能驾驶车辆路径跟踪控制策略,在状态控制层分别采用变角传动比控制和固定角传动比控制,并通过仿真分析了变角传动比线控转向系统与固定角传动比线控转向系统的车辆路径跟踪精度,仿真结果表明,在不同车速下,搭载变角传动比线控转向系统和智能预瞄模型的车辆具有更好的路径跟踪精度。

图11 30 m/s时质心侧偏角变化曲线
本文为智能驾驶车辆的路径跟踪控制提供了思路和方法,若以实车测试数据替代仿真数据将会具有更高的工程应用价值。在后续研究工作中,将通过实车测试进一步验证所设计控制策略的有效性。