极化码在OFDM水声通信中的应用研究
2021-03-10翟玉爽冯海泓李记龙
翟玉爽,冯海泓,李记龙
(1. 中国科学院声学研究所东海研究站,上海201815;2. 中国科学院大学,北京100049)
0 引 言
水下信道普遍存在多途干扰严重、多普勒频移、噪声干扰大、声传播损耗、可用带宽极为有限等因素,极大地制约了水声通信的发展。正交频分复用技术(Orthogonal Frequency Division Multiplexing, OFDM)可降低多途干扰,频带利用率高,并具有简化接收端信道均衡操作、可兼容其他信号处理技术等优势,是实现高速稳健水声通信的有效方案[1]。为进一步提高通信系统传输质量,将现有的水声通信技术与先进信道编码技术进行结合,是目前水声通信的一个新的研究热点。
初期数字水声通信采用博斯-乔赫里-霍克文黑姆(Bose Chaudhuri Hocquenghem, BCH)码、里德-所罗门(Reed-Solomon, RS)码、卷积码等传统信道编码方法[2]。近20年来,Turbo码与低密度校验(Low Density Parity Check, LDPC)码得到广泛研究和应用,两者具有优越的纠错性能并接近香农限[3]。2009年,土耳其学者Arikan[4]提出了极化码的设计思想,首次以构造性方法证明信道容量渐近可达。因其高可靠性、实用的线性编译码复杂度和理论上唯一可达香农极限等特点,极化码成为信道编码领域的热门研究方向,并写入5G标准[5]。其编译码方法的研究已扩展至众多信道类型和应用领域:
(1) 编码时码字构造方法的研究,Arikan[4]针对二进制删除信道(Binary Erasure Channels, BEC)提出巴氏参数法,Mori等[6]提出适用于所有类型的二进制输入离散无记忆信道(Binary Input Discrete Memoryless Channel, BDMC)的密度进化(Density Evolution, DE)法,高斯信道(Additive White Gaussian Noise Channel, AWGNC)中,有高斯近似(Gaussian Approximation, GA)法[7]、蒙特卡洛逼近法[4]、巴氏参数界法[8]和Design-SNR[9]法等,另外部分序构造法[10]以及极化度量(Polarization Weight, PW)法[11]等不依赖于信道条件的通用构造法成为新的研究热点;(2) 极化码译码算法的研究,Arikan的另一个重要贡献是提出了串行抵消(Successive Cancellation, SC)译码算法[4],在平衡性能和计算复杂度的基础上,串行抵消列表(Successive-Cancellation List,SCL)算法[12-13]、循环冗余校验码辅助的SCL(Cyclic Redundancy Check Assisted SCL, CA-SCL)算法[14-15]、置信传播(Belief Propagation, BP)算法[16]、软输出连续删除(Soft Cancellation, SCAN)算法[17]等译码方法相继产生;(3) 极化码在并行通信、信源编码、编码调制技术以及物理层信息保密技术等相关理论研究领域的发展。目前,极化码的应用场景由最初的二进制离散无记忆信道(Binary Discrete Memoryless Channel, B-DMC)向着其他信道拓展,如高斯信道[9]、衰落信道[18]等,但在水声信道中的理论证明和应用研究相对较少且滞后[19-20]。
本文针对具有明显多途、多普勒扩散和有限带宽等复杂特性的水声信道,对 Arikan[4]提出的极化码的码字构造可靠性估计方法和译码方法予以改进和优化,建立与水声信道相匹配的极化码信道编码机制;并结合OFDM技术搭建水声通信系统,对提出的极化码信道编码机制在 OFDM 水声通信中的性能表现进行理论研究、仿真验证;同时针对不同水声信道模型、信道参数以及不同极化码参数,研究极化码在水声通信中的性能变化,并与目前应用成熟且性能优越的LDPC码、Turbo码进行对比。
1 极化码与水声信道
1.1 极化码
Polar码的应用基于信道极化定理[4]。给定的任意BDMC信道W:x→y,令W(y|x)为信道转移概率。其信道容量I(W)表示能够通过信道W无错误传输的最大信息速率,用以衡量信道传输速率。其巴氏参数Z(W)为只传输0或者1的最大似然判决错误概率的上限,用以衡量信道传输可靠性。
若极化码码长为N= 2n(n为任意正整数),则将BDMC信道的N个独立副本W经过信道合并与信道分离,得到N个极化子信道。当N→∞时,一部分子信道容量趋近于 1,即该信道为好的无噪声信道,而另一部分子信道信道容量趋近于0,即差的完全噪声信道。其中容量为1的信道占信道总数的比例正好是原 BDMC信道的信道容量I(W),这一现象称作信道极化。在有限码长下,信道极化不完全, 随着N增大,极化趋势更明显,以BEC信道为例,N=1 024时极化现象如图1所示。
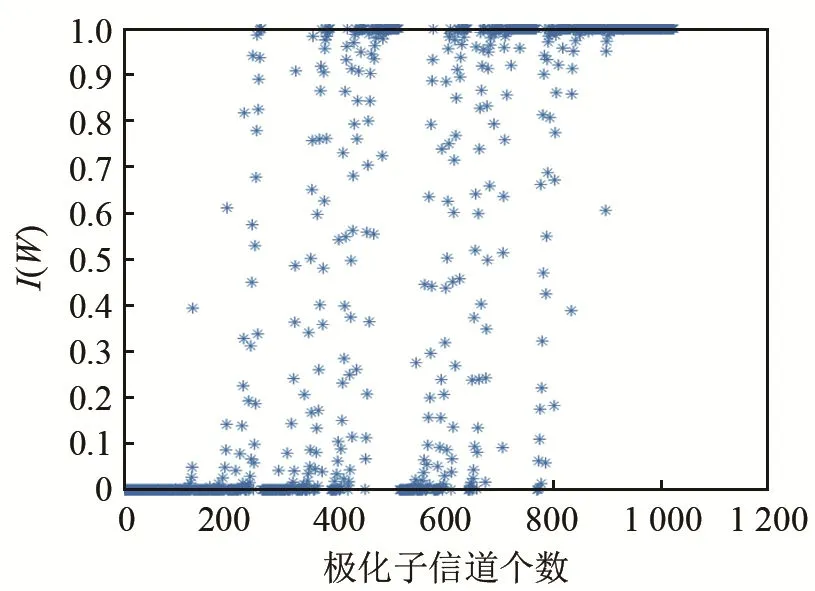
图1 码长N =1 024时BEC信道极化现象示意图Fig.1 Schematic diagram of BEC channel polarization when N =1 024
极化码信道编码的应用流程分为极化子信道的可靠性估计即码字构造、编码和译码3个步骤:
(1) 基于信道极化现象,编码前需根据码字构造方法,进行极化子信道的可靠性估计,挑选出K个较好的子信道A,用以放置K个信息比特uA,在其余较差的子信道AC上放置收发双方都已知的(N-k)个固定冻结比特uAC,即可得到原始发送序列u1,N。码率可表示为

1.2 水声信道
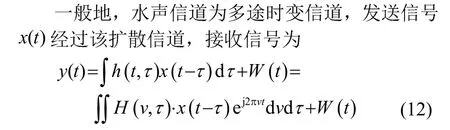
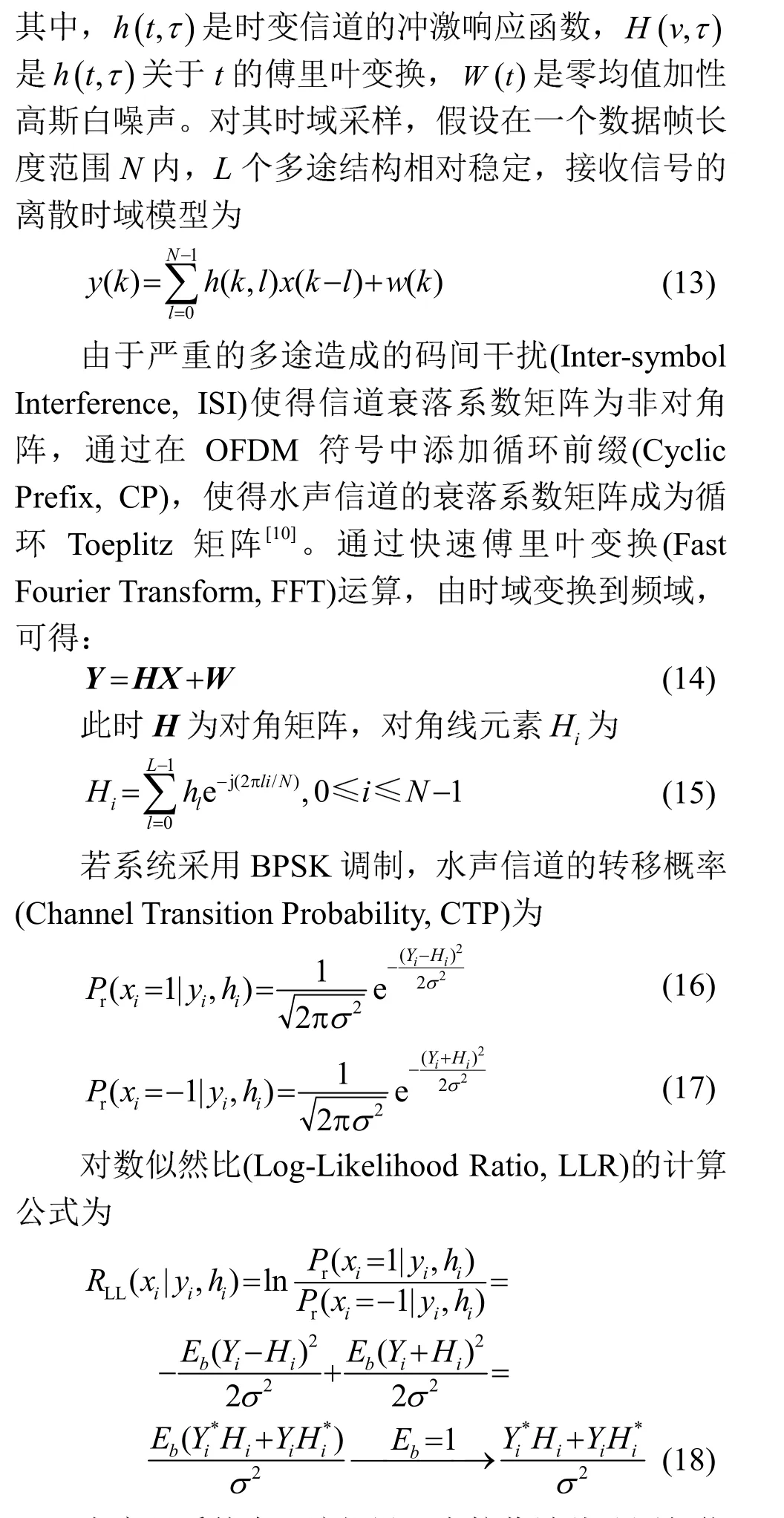
在实际系统中,该假设可在接收端估计测得信道边信息(Channel Side Information, CSI)即信道增益H、噪声方差σ2后,利用反馈链路告知发送端,本文利用信道估计和无信号传输时噪声功率的测量分别获得信道增益和噪声方差值。
2 水声信道的极化码信道编码机制
2.1 极化水声信道的可靠性估计
2.1.1 蒙特卡洛逼近法
Arikan提出的蒙特卡洛法[4]基于统计特性对极化信道进行可靠性估计,被证明可应用于多种类型信道[9],但此方法因式(19)符号集的指数型爆炸式增长变得不实用,且精确度不够高。
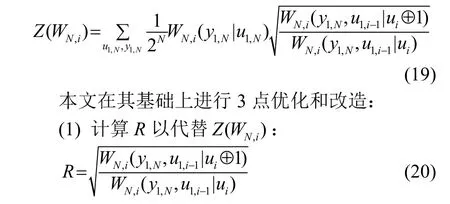
可对R进行大量仿真得其期望值Z(WN,i)。本优化可将蒙特卡洛法的计算复杂度降至O(MNl og2N),其中M为蒙特卡洛模拟次数。
(2) 在发射端,将所有子信道都看成不理想的信道,放置收发双方已知的固定冻结比特,本文设为0,构成原始信息比特序列u1,N。这种优化方法一方面避免了每次模拟重复编码,另一方面简化了SC译码时的似然判决部分,两方面都进一步降低了蒙特卡洛法的计算复杂度。
(3) 似然比的计算改为在对数域进行,同时结合水声信道特征参数信道增益H、噪声方差σ2,按式(18)改进译码时初始对数似然比的计算。这种优化方法进一步降低了计算复杂度,并使其适合水声信道,提高估计准确性。
优化方法的流程图如图2所示。
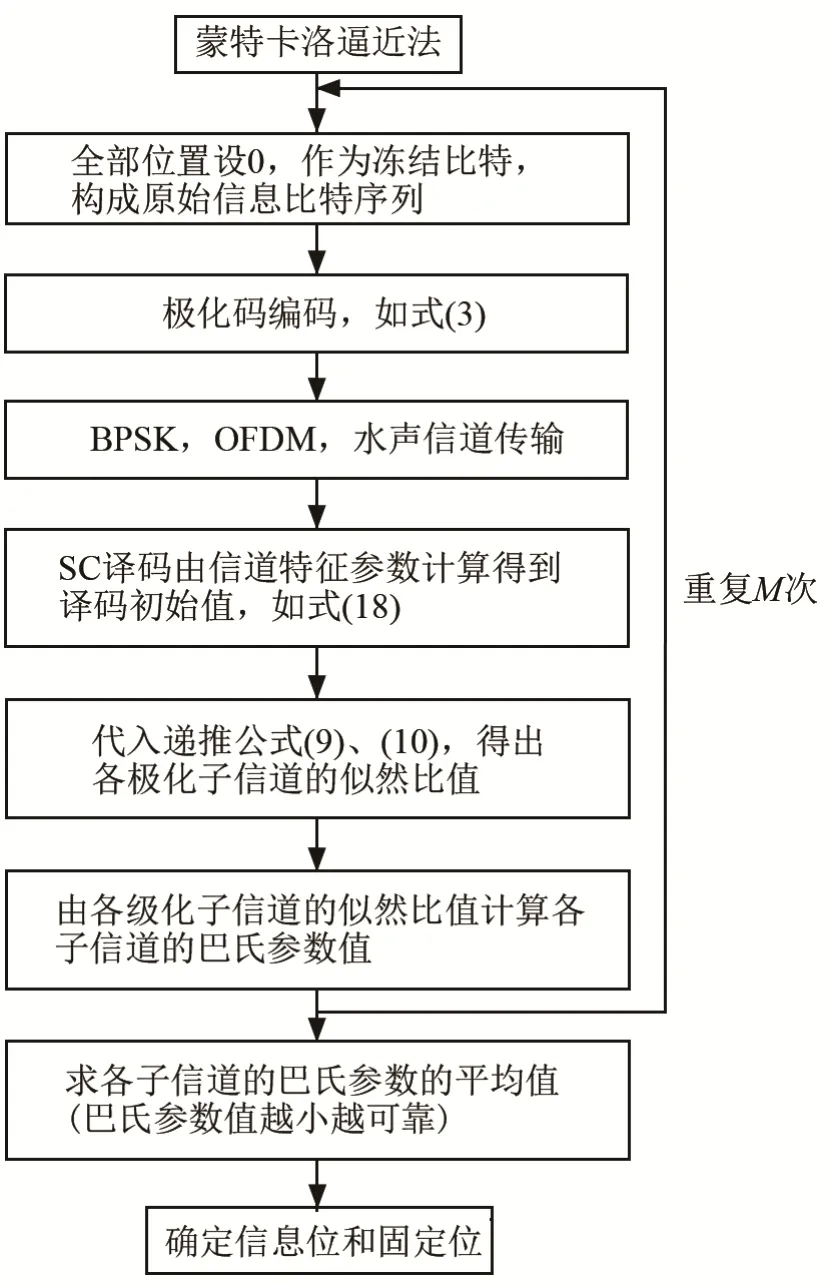
图2 蒙特卡洛逼近法构造极化码流程图Fig.2 Flowchart of the Monte Carlo estimation method for Polar code construction
2.1.2 巴氏参数界法
最早提出的经典巴氏参数法[4],因其低复杂度O(Nl og2N)被广泛应用[9]。但该方法中的巴氏参数初始值Z1(W)是针对 BDMC中最差误码率而被提出的0.5,且递推公式中的式(22)上界仅在BEC中可达。

本文在其基础上进行两点优化和改造,提高估计准确性:
(1) 根据水声信道特征参数优化巴氏参数初始值Z1(W)。结合信道增益和噪声方差σ2,将式(16)和(17)代入式(2)即可得Z1(W)。
(2) 依据文献[8]中三种类型递归公式在瑞利衰落信道内的性能研究结果,选用式(23)代替式(22)作为水声信道内的巴氏参数递推计算公式:

经优化,该方法的具体步骤如图3所示。
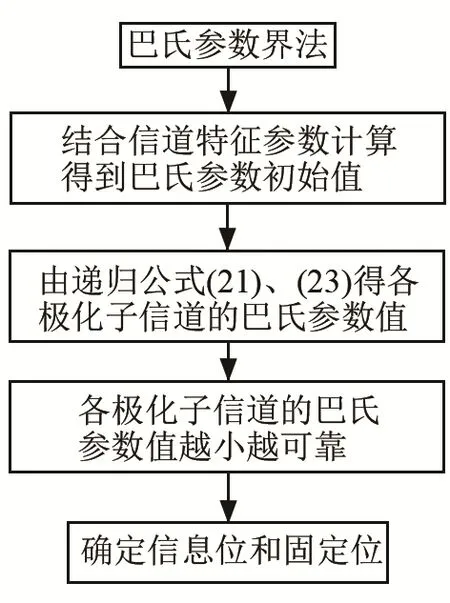
图3 用巴氏参数上界法构造极化码流程图Fig.3 Flowchart of the Bhattacharyya parameter bounds method for Polar code construction
2.2 水声信道的极化码译码
为研究极化码在水声信道中的译码方法,本文对SC、CA-SCL、BP、SCAN 4种译码算法进行性能测试和对比。
首先,结合水声信道的特征参数,按式(18)计算译码时初始对数似然比。
其次,本文采用BP译码法时迭代次数设为50,SCAN算法迭代1次。这是由于BP法的消息传递采用“洪水”规则,SCAN采用类SC算法的串行消除规则,因此BP算法的译码延时低于SCAN算法,但是SCAN算法的收敛速度明显好于BP算法。一般而言,BP算法需要40~50次的迭代过程[16],而SCAN算法1次迭代就能达到稍低于SC算法的性能[17]。
3 信道仿真与性能测试
3.1 OFDM水声通信系统描述及参数设置
搭建OFDM水声通信仿真系统,研究第2节的极化码信道编码机制在水声通信中的性能表现。系统原理框图如图4所示,参数设置如表1所示。

图4 OFDM水声通信系统基本原理框图Fig.4 Block diagram of the OFDM underwater acoustic communication system

表1 OFDM水声通信系统参数Table 1 Simulation parameters of the OFDM underwater acoustic communication system
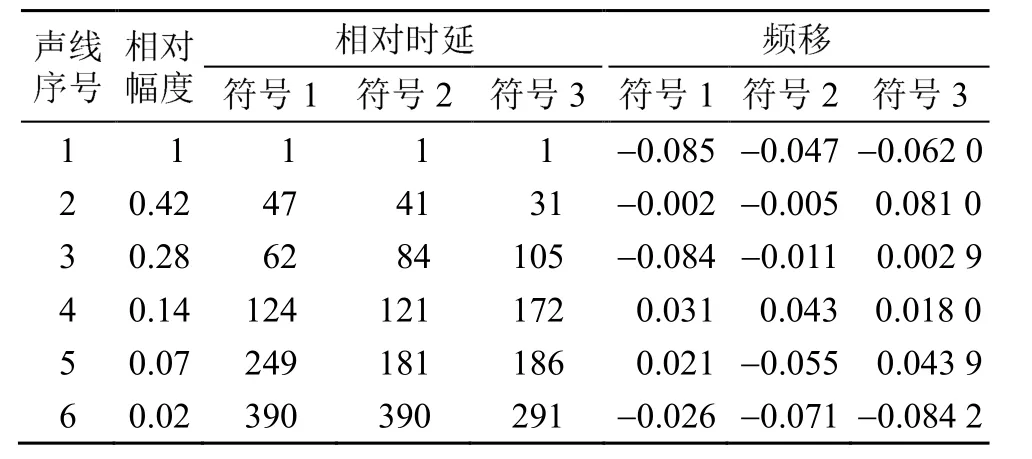
表2 水声时变信道参数Table 2 Simulation parameters of the UWA time-varying channel
3.2 极化水声信道的可靠性估计
3.2.1 蒙特卡洛逼近法
在码长N=256、码率R=0.5时,蒙特卡洛逼近法的误码率(Bit Error Rate, BER)随模拟重复次数的变化情况,如图5所示。
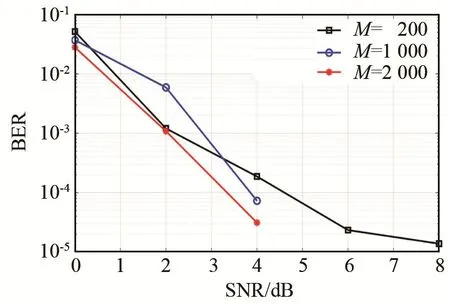
图5 水声时变信道中不同重复次数的蒙特卡洛逼近法误码率性能随信噪比的变化Fig.5 BERs of the Monte-Carlo estimation method with different repeat number in the UWA time-varying channel
由图5可知,蒙特卡洛逼近法在降低计算复杂度的基础上,使得极化码的误码率在信噪比为4dB时可达 10-4~10-5,满足水声通信的误码性能指标和纠错需求。且随着蒙特卡洛重复次数由200增加到2 000,性能越好,约有0.5~1 dB的性能增益,因此在实际使用该方法时,重复次数M不需设置太大,避免过高的计算复杂度。
3.2.2 巴氏参数界法
在码长N=256,码率R=0.5时,优化之后的巴氏参数初始值Z1(W)与原作者提出的0.5[3]相比,性能增益约为 4 dB,提高了估计准确性,误码率在10 dB时达10-3。
3.2.3 蒙特卡洛逼近法和巴氏参数界法的性能对比
极化码码长N=256,码率R=0.5时,蒙特卡洛逼近法重复次数M=2 000,两者性能对比,结果如图7所示,蒙特卡洛逼近法性能较巴氏参数上界法更好,性能增益约8 dB。在后续性能分析的过程中,采用蒙特卡洛逼近法作为极化码码字构造方法。
3.3 极化水声信道的译码方法
极化码码长N=256,码率R=0.5时,在水声信道中,对SC,CA-SCL,BP,SCAN 4种译码算法进行性能测试和对比。其中,BP译码法迭代次数为50,SCAN算法迭代次数为1,SCL译码方法搜索路径数分别设为 8 (记为 SCL8)和 16 (记为SCL16),循环冗余校验(Cyclic Redundancy Check,CRC)的码字长度为4,测试结果如图8所示。
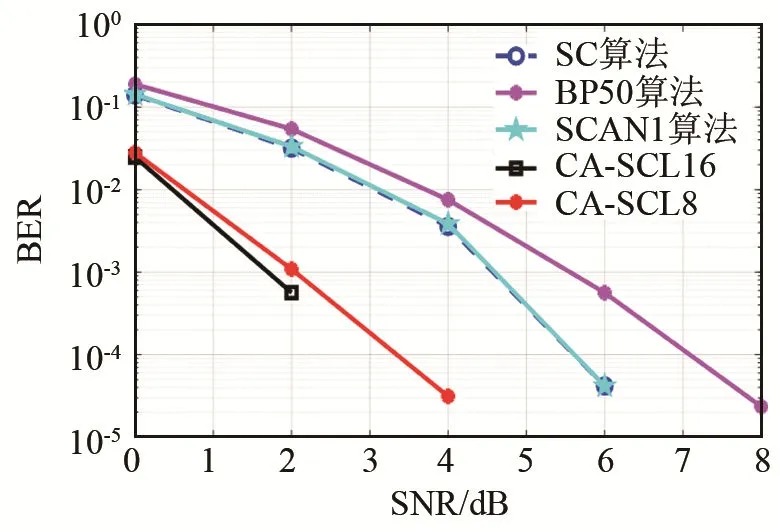
图8 水声时变信道中N=256,R=0.5时,极化码译码方法误码率对比Fig.8 BER comparison of different polar code decoding methods in UWA time-varying channel when N=256, R=0.5
由图8可知,在水声时变信道中,CA-SCL译码法性能远好于其他三种算法,约有2~4 dB的性能增益,SC和SCAN算法性能相近,BP算法性能较差。同时,CA-SCL译码法的搜索路径数量越大,译码性能越好。
因此,在后续的性能分析过程中,极化码译码方法采用CA-SCL译码法,搜索路径数设为8,CRC校验的码字长度为4。
4 基于 OFDM 水声通信的极化码信道编码性能测试
4.1 Polar码在不同水声信道中的性能分析
将第3节中极化码信道编码机制,即蒙特卡洛逼近法和CA-SCL译码法,运用至OFDM水声通信仿真系统。测试极化码在水声时不变信道、时变信道和快时变信道模型的性能,并与目前应用成熟且性能优越的LDPC码、Turbo码进行对比。
4.1.1 水声信道模型
(1) 时不变水声信道
本文建立水声时不变信道模型[22],时不变水声信道的冲激响应可表示为

Q条路径具有独立的幅值Aq和时延τq,两者为常量参数,不随时间发生变化,水声时不变信道参数如表3所示。

表3 水声时不变信道参数Table 3 Simulation parameters of the UWA time-invariant channel
(2) 快时变水声信道
本文借鉴[23]的快时变信道模型和信道估计与均衡方法,通过直接构造随机离散采样快时变信道传递函数和OFDM传输矩阵,表征系统处于高速移动时,多普勒频移扩展令多个子载波不再正交,产生载波间干扰(Inter-Carrier Interference,ICI)的状态。相较于第3节的时变信道,该信道的传递函数在一个OFDM符号内是变化的,设一个OFDM符号内的第l个子载波位置、第m个时间采样点的信道传递函数为

式中:多途数量Q= 3 ,多普勒频移fq满足 Jakes多普勒谱密度分布,随机相位θq在0~2π间均匀分布,随机归一化时延τi/T在0~τmax/T间均匀分布。
4.1.2 不同水声信道模型下的Polar信道编码
设定极化码N=256,R=0.5,针对不同水声信道模型,进行极化码的性能测试,结果如图9所示。
由图9可知,水声信道环境的复杂性,以及现有水声信道估计与均衡等技术的局限性,对极化码的性能有一定影响。在时不变信道中,极化码的误码率性能最优,时变信道次之,快时变信道最差。极化码在时不变信道、时变信道中的误码率可达10-4~10-5,性能差异约为 1~1.5 dB。快时变信道中误码率为10-3量级,极化码在时变信道比快时变信道中的性能增益约为6 dB,时不变信道比快时变信道中的性能增益约为8 dB。
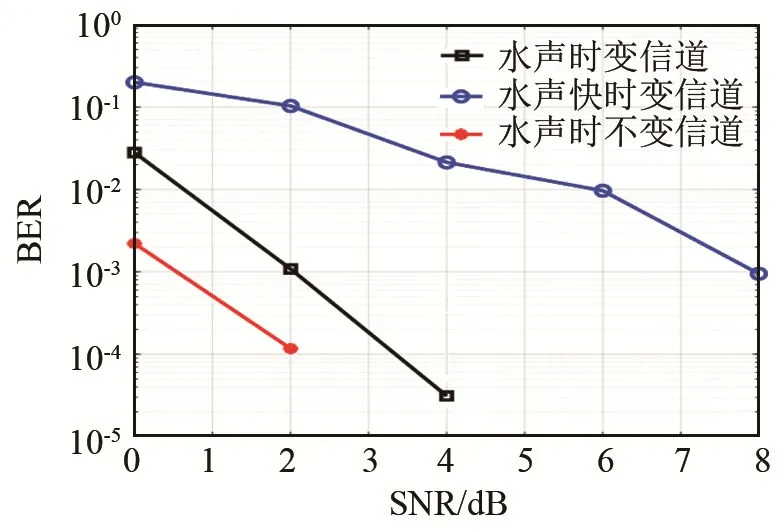
图9 不同水声信道模型下Polar信道编码的误码率比较Fig.9 BER comparison of Polar codes in UWA time-invariant,time-varying and fast time-varying channels
4.1.3 Polar码与LDPC码、Turbo码在不同水声信道模型下的性能对比
本文在水声时不变信道模型、时变信道模型以及快时变信道中,将极化码与Turbo码、LDPC码进行性能测试对比。仿真时,借鉴文献[22]构造LDPC码,采用随机构造的校验矩阵,LLR-BP译码算法,迭代次数为 25;借鉴文献[1]构造 Turbo码,仿真时两分量编码器的生成矩阵均为(37,21),迭代次数为5。
设定极化码、LDPC码、Turbo码的码长、码率均分别为N=256、R=0.5,结果如图10、图11、图12所示。
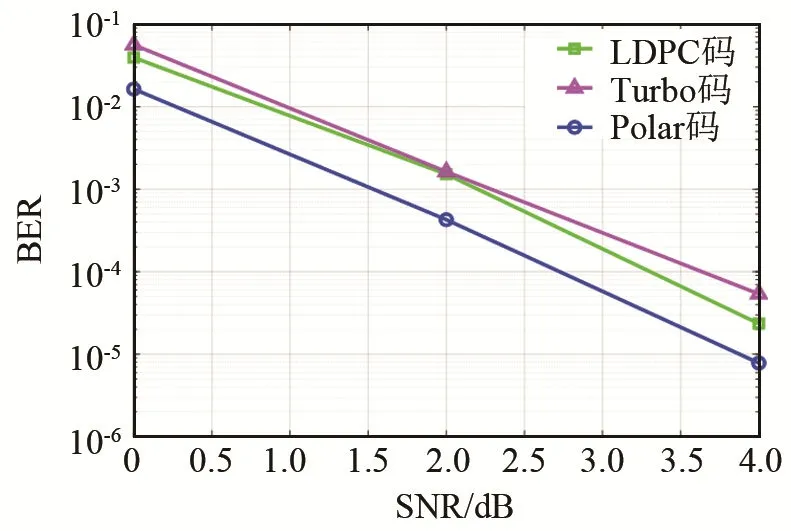
图10 Polar码、LDPC码、Turbo码在水声时不变信道中的误码率比较Fig.10 BER comparison of Polar code, LDPC code and Turbo code in UWA time-invariant channel

图11 Polar码、LDPC码、Turbo码在水声时变信道中的性能Fig.11 BER comparison of Polar code, LDPC code and Turbo code in UWA time-varying channel

图12 Polar码、LDPC码、Turbo码在水声快时变信道中性能Fig.12 BER comparison of Polar code, LDPC code and Turbo code in UWA fast time-varying channel
由图 10可知,从总体看,在三种水声信道模型下,Polar码的误码率性能均优于LDCP和Turbo码,三种码的误码性能均随信噪比的增长而逐渐优化。同时在时不变信道中,三种码的误码率性能最优,时变信道次之,快时变信道最差,其中,LDPC码和Turbo码的性能与文献[1]中表现一致。在时不变信道和时变信道中,Polar码的性能最优,LDCP码次之,Turbo码较差,误码率均可达10-4~10-5,Polar码优于LDCP码0.5 dB左右,优于Turbo码1 dB左右。在快时变信道中,Polar码的性能最优,Turbo码次之,LDCP码较差,误码率可达10-3,Polar码较Turbo码有 2 dB左右的性能增益,较 LDCP码有6 dB左右的性能增益。
4.2 极化码性能随极化码参数变化的仿真分析
进一步研究码长N,码率R等极化码参数对极化码性能的影响,仿真环境为水声时变信道。
4.2.1 Polar码性能随码长N的变化
极化码码长分别设为N=128、256、512,码率为R=0.5,仿真结果如图13所示。
由图13可知,极化码性能随码长N由128增大至512而变优,约有0.5~4 dB的性能增益,符合信道极化现象和定理。
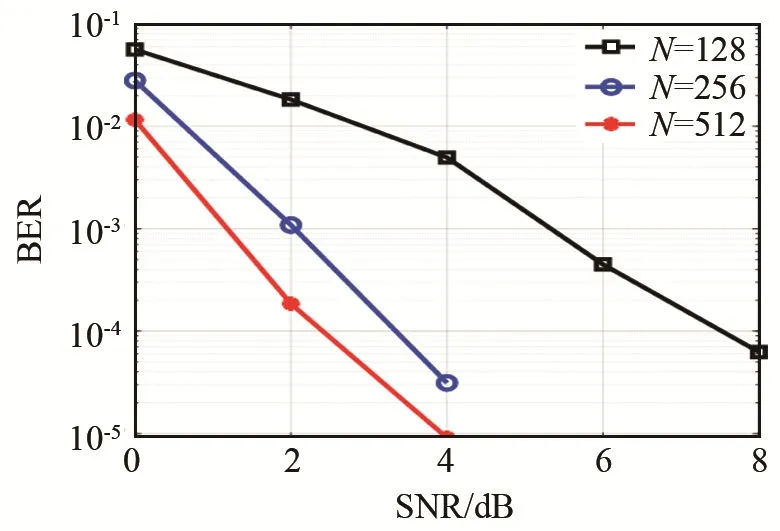
图13 水声时变信道中不同码长N时的极化码性能Fig.13 BERs of Polar code with different code length N in UWA time-varying channel
4.2.2 Polar码性能随码率R的变化
极化码码率分别设为R=0.2,0.5,0.8,码长N=256,结果如图14所示。
由图14可知,极化码性能随码率R由0.8减小至0.2而变优,约有0.3~5 dB的性能增益。码率越低,冗余越多,在译码端辅助译码的冻结比特越多,性能越好。
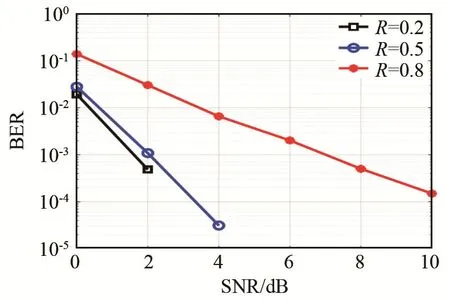
图14 水声时变信道中不同码率R时的极化码性能Fig.14 BERs of Polar code with different code rate R in UWA time-varying channel
4.3 极化码性能随信道参数的变化
在OFDM水声通信系统中,仿真环境为水声时变信道,观察信道变化的参数(多途数量Q、最大多途时延τmax以及最大多普勒频移fmax)对极化码性能特性的影响。设极化码的码长N=256,码率R=0.5。
4.3.1 Polar码随信道多途数量的变化
研究信道多途数量变化对极化码性能的影响,设最大多普勒频移fmax=1 0-3F,最大多途时延τmax=T/4,多途的数量分别取2、4、6、8、10,在OFDM水声通信系统中测试Polar 码的性能。结果图15所示。
由图 15中结果可知,随着多途数量的增加,极化码的性能逐渐下降4~5 dB。当多途数量小于8时,误码率均可达10-4~10-5,多途数量为10时,误码率可达 10-3~10-4,可满足水声通信的误码指标要求。
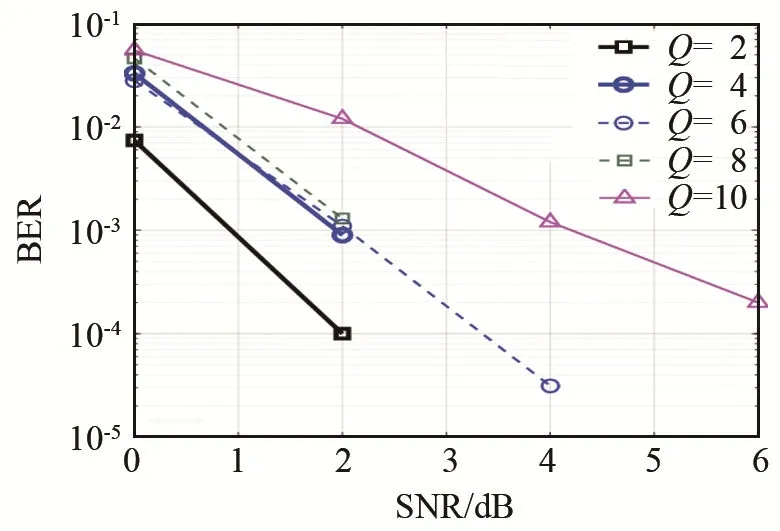
图15 水声时变信道中不同多途数量Q时的极化码性能Fig.15 BERs of Polar code with different number of multipaths in UWA time-varying channel
4.3.2 Polar码随信道最大多途时延的变化
研究信道最大多途时延τmax变化对极化码性能的影响,设水声信道多途的数量Q=6,最大多普勒频移设为fmax=10-3F,最大多途时延τmax以及归一化时延τmax/T如表4所示。通信过程中,要保证循环前缀长度足够长,循环前缀长度应大于等于最大多途时延τmax。测试结果如图16所示。

表4 水声时变信道最大多途时延参数Table 4 Maximum multipath delay parameters in the UWA time-varying channel
由图 16中结果可知,最大多途时延取值范围为(T/8)~10T,随着最大多途时延增加,极化码的性能逐渐下降2~3 dB,误码率均可达10-3~10-4,可以满足水声通信的误码率指标要求。

图16 水声时变信道中不同最大多途时延τ的极化码性能Fig.16 BERs of Polar code with different maximum multipath delay in UWA time-varying channel
4.3.3 极化码性能随信道最大多普勒频移的变化
为研究信道最大多普勒频移变化对极化码性能的影响,设水声信道多途数量Q=6,最大多途时延τmax=T/4。最大多普勒频移的选取以及归一化最大多普勒频移 (fmax/F)如表5所示,测试结果如图17所示。
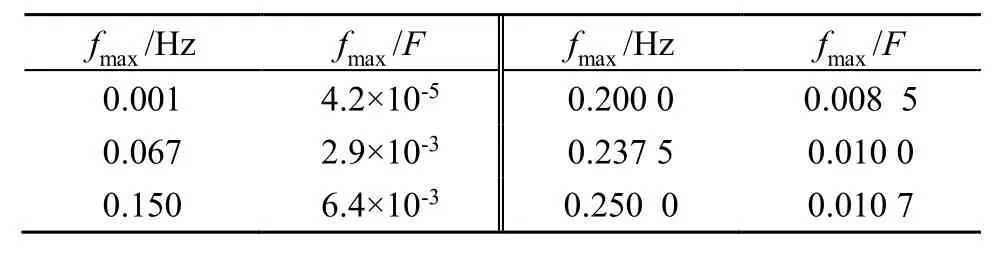
表5 水声时变信道最大多普勒频移参数Table 5 Maximum Doppler frequency shift parameters in the UWA time-varying channel
设定SNR为4 dB,观察BER随信道最大多普勒频移的变化情况,研究极化码容错性,结果如图18所示。

图18 水声时变信道中不同归一化多普勒频移时的极化码性能Fig.18 BERs of Polar code with different channel normalized Doppler frequency shifts in UWA time-varying channel when SNRis 4 dB
由图18可知,当归一化多普勒频移 (fmax/F)<0.01 ,极化码的误码率可达10-3~10-4,可满足水声通信的误码率指标要求,且随着最大多普勒频移的增加,极化码的性能下降约4 dB。归一化多普勒频移 (fmax/F)≥0.01 ,极化码无法发挥其作用。SNR=4 dB,归一化多普勒频偏≥9× 1 0-3时,误码率大于 10-2,极化码失效,在实际应用中,应保证。
5 结 论
本文在现有的极化码理论原理和应用研究的基础上,结合水声信道特征和水声通信技术,对蒙特卡洛逼近法和巴氏参数界法进行优化和仿真性能测试;对SC,CA-SCL,BP,SCAN 4种译码算法进行性能测试和对比;并选用性能较为优越的蒙特卡洛逼近法和CA-SCL法,建立了与水声信道相匹配的极化码信道编码机制;结合OFDM技术搭建水声通信系统,对提出的极化码信道编码机制在OFDM 水声通信中的性能表现进行理论研究和仿真验证;同时针对不同水声信道模型、信道参数以及不同极化码参数,研究极化码在水声通信中的性能变化。由本文的结果可知,极化码信道编码机制可满足水声通信的误码率指标要求,能有效提高水声通信的可靠性,且性能优于LDPC码和Turbo码。
