数字卫星概念研究
2021-03-04董云峰
董云峰,李 智,雷 鸣
(北京航空航天大学宇航学院,北京 100191)
0 引言
针对一个特定物理系统构建的数学模型称为数字系统,数字系统生存在数字环境中,数字系统和数字环境组成一个与物理世界对应的数字世界。早在1997 年,美国国防部定义了虚拟样机(Virtual Prototyping,VP)的概念[1-2]。VP 是建立在计算机上的原型系统,它已成为设计部门评估和交流设计的必要工具[3-4]。VP 在系统维和时间维上,都强调了数字系统对物理系统的完整对映,所以是个完整的数字系统,但它并没有对数字世界和物理世界的交互程度进行定义。2003 年,GRIEVES 在美国密歇根大学的产品全生命周期管理课程上提出数字孪生(Digital Twin,DT)的概念[5-6],并联合美国空军研究实验室,将DT 定义为充分利用数学模型、传感器更新、运行历史等数据,集成了多学科、多物理量、多尺度、多概率,在数字世界中完成对物理系统完整映射,能刻画和反映真实物理系统全生命期的仿真过 程[7]。DT 不仅丰富了VP 对数字模型的要求,还定义了数字世界和物理世界的交互融合特征。数字孪生后来被广泛接受,并认为是新一代工业革命的基石。系统越复杂,按系统工程方法决策的价值越大。传统的基于文本的系统工程(Text-Based Systems Engineering,TBSE)更适合定性分析,没有充分利用数字系统的优势。国际系统工程学会(International Council on Systems Engineering,INCOSE)于2007 年提出了基于模型的系统工程(Model-Based Systems Engineering,MBSE)概念[8],2008 年进一步明解了MBSE 对设计、分析、验证和确认等活动的支持[9]。
美国在虚拟样机、基于模型的系统工程、数字孪生等研究方面起步较早。实际上,至少在1990 年之前,休斯和劳拉的动态模拟器就不仅是用来训练卫星操作员的,它更重要的用途是同一卫星工程不同技术团队相互交流的工具。1997 年文献报道,美国国家航空航天局(National Aeronautics and Space Administration,NASA)开发了一套基于Simulink的全子系统仿真、有整星尺度的耦合的卫星模拟器(The Spacecraft Simulator,SPASIM),但天体尺度的环境模型部分较简化,没有体现出部件尺度的模型特点[10]。同年,休斯公司的H601 模拟器实现了姿控、电、热、推进、测控、载荷的子系统的硬件在回路仿真[11]。如美国空军技术学院在1999 年公开的SIMSAT 卫星整星模拟器,能够支持姿控、供电、测控、通信、结构、推进子系统的仿真[12]。2004 年文献报道的FAST 系统,是一套编队飞行的卫星模拟器,考虑了姿轨耦合、整星尺度的半物理仿真[13]。2005 年NASA 提供了一套开源的航天任务分析软件JAT,能支持天体到卫星尺度的姿轨控动力学仿真[14]。从2010 年发表的文献看,SpaceX 为发射控制中心的操作员开发了一套航天器发射和在轨控制系统[15],后续又在公开网站上为航天爱好者提供了龙飞船与国际空间站对接的模拟器(International Space Station Docking Simulator),但公开文献中无其内部航天器模拟软件的详情。从SpaceX 公司的技术发展过程看,产品强调的大规模生产能力,没有多个个性化卫星的定制工程,对代码自动生成功能的需求有限。从2013 年发表的文献看,NASA 已开发了MBSE 架 构[16],这个架 构在立 方体卫 星(Cube Satellite,CubeSat)[17]、火情预警卫星(Fire Satellite,FireSat)[18]的设计中得到应用。NASA 制订了卫星生命周期中模型使用及复用的基础架构NIMA,支持软件模块复用,也支持文档与报告的自动生成[19],2015 年发表的文献也证实了这个系统仿真粒度到了部件级,可以在电信接口上和真实卫星保持一致[20]。从2016 年公开发表的文献看,以NOS3 为代表的产品较好地继承了休斯和劳拉公司的技术传统,实现了对一个卫星全生命期的完整支持[21]。目前能代表美国先进水平的公司是SpaceX,但这个公司数字卫星的相关公开资料几乎没有。近年来,美国洛马、SpaceX、ANSYS、参数技术公司,法国达索公司,德国西门子公司等均在数字孪生技术方面开展了大量的研究和探索工作,在设计、制造等方面取得巨大成效[22-24]。
欧洲航天局(European Space Agency,ESA)也在积极地应用MBSE 并取得一定成果[25]。ESA的SIMULUS-M 产品,率先实现了仿真代码的自动生成功能。它的产品透明度比较高,现在还可以在网站上查到相关资料。2000 年荷兰航天机构研发的可配置仿真工具EuroSim,通过人在回路或者硬件在回路中的实时仿真,在可行性、工程化、样机、转移测试以及操作培训的每个阶段都能发挥作用[26]。2002 年文献中,第一代伽利略系统仿真程序(Galileo System Simulation Facility,GSSF),实现了姿轨控与导航耦合,达到了系统级仿真[27]。2006 年的文献中,将SIMSAT3.0 作为仿真内核,用SMP2.0 标准建立起了更强大的伽利略系统的星座模拟器,包含多粒度的卫星模型、从简单功能模型到 全子系统高保真模型3 个级别[28]。2008 年的文献中,提出了一种基于SMP2.0 标准的参考航天器模拟器架构,定义了全子系统部件级接口与耦合关系,应用SIMULUS4.0 完成建模与测试,为ESA 以后的模拟器开发提供参考[29]。2012 年文献中展示了性能指标工具(Performance Indicator Tool,PIT)及其提高基于SIMULUS 的操作航天器模拟器的代码质量和性能方面的适用性过程[30]。2013 年德国航空中心提供了OS3 开源卫星模拟器,在姿轨控测控子系统模型方面具有较高精度,与真实卫星数据比对验证,通过模块化结构提高系统的扩展性 和复用 性[31]。另 外,2012 年巴西 的CBERS3&4 卫星模拟器也采用SMP2 标准以增强模型的可重用性[32],2016 年法国MERLIN 任务的卫星训练操作与维护模拟器TOMS 也支持SMP2标准[33]。
国内对MBSE 在航天器研制[34]和载人航天[35]方面进行了探索,在大型复杂卫星和卫星总体设计方面进行了研究[36-37]。同时,国内也在积极探讨数字孪生系统的概念和应用问题,提出了数字孪生五维模型的概念,指出了数字孪生在卫星/空间通信网络等领域的落地应用探索与实施过程中所需突破的关键技术[38-39],讨论了建立数字孪生系统标准体系架构等问题[40]。
系统工程包含技术和管理两个层面:一是由构建、分析、优化、验证组成的系统建模技术;二是由计划、组织、领导、控制组成的建模工作的组织管理技术。系统工程的研究对象是一个系统,所以基于模型的系统工程,其实质是数字系统建模技术和数字系统的组织管理技术。任何一个技术应用在工程实践中,必须评估采用这个技术的收益和代价,只有收益大于代价时,这个技术才能推广。评估这个建模和模型组织管理的收益和代价,就必须先明确建模的要求。数字系统组织管理的主要成本是人力成本,取决于人在计算机上操作软件的工作量,取决于模型管理工作的自动化智能化水平。所以,在卫星工程中应用MBSE,必须先明确对数字卫星的要求和对数字卫星组织管理自动化程度的要求。为了便于讨论,本文将针对特定卫星的数字系统定义为数字卫星,数字卫星生存在数字空间环境中,构成一个与物理世界对应的数字世界。
认知科学的研究表明,人在处理复杂决策时,会评估问题的规模,将问题简化,以便在人脑有限的思考能力和有限时间内完成决策。粒计算理论[41]进一步丰富了这个思想,它将模型的不确定性大小用粒度来表述。粒计算理论认为人决策的主要逻辑依据是粒度保假原理,如在粗粒度下无解,则在细粒度下也无解。卫星具有复杂性、庞大性和高度综合性的特点,是个典型的复杂系统,显然是无法用同一个数字卫星完成卫星工程全生命期所有的决策支持。卫星系统的研制过程与粒计算理论的描述是一致的。卫星工程中项目的论证、总体设计和详细设计确实是一个粒度由粗到细的过程。项目论证所需的模型相对比较简单,这个模型的不确定性大,粒度粗,而到详细设计时,要求比较完善的模型,模型的不确定性小,粒度细。
本文根据卫星动态模拟器[42]、虚拟样机、数字孪生和平行系统[43-45]等与数字卫星相关的概念,利用粒度描述数字卫星模型的不确定性,分析构建和应用数字卫星的工作量,促进MBSE 在卫星工程中的应用。
1 数字卫星模型不确定性定义
根据卫星工程对模型的要求,引用粒计算的概念,按数字卫星模型不确定性,本文定义点、流、场3 类不同仿真粒度的模型。
1.1 数字卫星点模型
卫星入轨后基本上处于无动力飞行状态,无需额外能量是卫星相对于航空器的优势,但只能运行在相对固定的轨道上也是卫星系统最主要的约束。假定卫星各个服务子系统都能完美地工作,不会影响系统功能,则不同卫星的个性就不存在了,所有卫星都可以看成一个点。定义不考虑各个子系统能力约束的卫星模型为数字卫星的点模型。点模型与现在通用的轨道模型没有区别,只是为了和后面的流模型和场模型的叫法更加相互呼应。
1.2 数字卫星流模型
卫星各个子系统根据特定的工作原理完成子系统设计。一般情况下,工作原理决定了系统的结构,这种结构像流水一样存在上下游关系。如姿态控制子系统,信号是从敏感器传到控制器再传到执行机构;供电子系统,是太阳帆板产生电,以供给蓄电池和各个单机部件。
定义各个单机都是理想部件,工作时除了功能流所涉及的参数外,不会对周围的其他部件产生影响,该卫星模型为数字卫星的流模型。流模型在子系统功能上是闭环的,所以可以在地面检查验证,如桌面联调、运动学动力学转台试验、热真空高低温环境试验等,都可以验证流模型的精度。流模型与现在通用的子系统设计模型没有本质区别,都是假定除了总体给出的设计约束外,各个子系统之间不存在相互耦合,将卫星系统层面的问题简化为各个子系统给定约束下的能力最大化问题。
1.3 数字卫星场模型
卫星总体设计最终要将各个单机部件紧凑地安排在一起,各个部件共享物理场,这些物理场包括力学环境、电磁环境、热环境等。多个物理场互相耦合产生影响,场之间的耦合发生在不同的空间尺度上,如辐射、磁场、外热流是在天体尺度上,单机部件之间的电磁兼容性是在整星尺度上,轴承摩擦特性发生在微观尺度上。卫星的动态特性分布在不同频率上,以动力学为例,轨道运动周期是小时级别,姿态运动周期是秒级别,弹性微振动是毫秒级别。
借取数字孪生系统的多动态、多尺度、多概率、多物理场耦合特点,本文定义集成天体、整星、零部件局部细观多空间尺度,轨道、姿态、微振动多频谱动态、机电热光磁辐射多物理场耦合的卫星模型为数字卫星的场模型。场模型是针对卫星个体的,不同的卫星在动态频率、空间尺度、物理场耦合特征是不一样的。场模型是目前最小粒度的数字卫星模型,场模型与数字孪生和平行系统的建模要求一致。个性化卫星的场模型,至少要和卫星在轨运行遥测数据比对,才能量化模型的不确定性,并根据差异进行反复的模型和参数修正,降低模型的不确定性。
2 数字卫星建模与模型组织管理操作模式定义
构建和管理一个数字系统,在逻辑上,先要明确概念,理解原理,给出数学公式描述;然后才能书写源程序,编译成可执行程序,确定仿真工况集合,运行可执行程序,对输出结果进行统计分析,得出结论。按照这个逻辑,根据建模与模型组织管理操作的自动化程度,将人工操作定义为编程开发、软件交互、自动化、智能化处理4 种操作模式。
2.1 编程开发
编程开发主要针对建模工作,这种操作模式人力成本最高,智能水平要求也最高。人要学习掌握知识,把数字公式描述编排成算法,划分模块写出源程序,确定测试方案,调试程序完成测试,才能得到可执行程序。编程开发的要求高,但这种模式对工程的适应性最强,不论多特殊的卫星,这种模式都能完成MBSE 要求的建模工作。
2.2 软件交互
软件交互模式的前提是已经有数字卫星软件程序,这个程序可能是团队内部的,也可能是集成或分散的商业软件。由于这个软件已经通过了测试,正确性是有保障的,所以人的工作比编程开发要少很多。在建模工作上,主要是按软件要求修改输入参数。在模型组织管理上,主要是根据研究的问题,确定进行多少个工况的仿真,为每个仿真工况准备输入文件,执行完每个工况的仿真后,对输出结果进行统计分析,生成他人可阅读的报告。软件交互模式的应用范围是有限制的,由于可执行程序不能改变,它的公式和算法是不能变的。如果数字卫星有特殊性,仅调整参数不能反映真实卫星的特点,这个数字卫星就不能用了,必须返回到编程开发模式。
完成一个MBSE 应用,就算有工具软件,从建模到模型管理,也很难由一个程序一次完成。如果有多个程序构成,前一个程序的输出信息还需要整理为后一个程序的输入信息,多个程序联合起来,就构成了一个软件操作序列,这个序列也可能包含若干个迭代循环子序列。这些工作都需要人通过鼠标键盘参与,工作效率低,耗费了大量的人力资源。
2.3 操作自动化
当建模在工作规范的指导下,可以形成简单的有限选择决策分支,就可以通过软件自动化技术完成建模工作。微软的VisioStudio 是最常见的软件工具,程序员在可视界面上定义需求,VisioStudio会通过特定的规则自动生成代码。ESA 的SIMU⁃LUS 工具也是用类似原理,通过注册制构建软件架构生成,完成了数字卫星的自动化建模工作。本文将这种按规则执行计算机自主模式定义为操作自动化模式。
模型的组织管理工作都体现在软件操作上。除了人机界面之外,大部分工具软件都提供命令行接口,可以通过脚本文件完成软件调用。除了操作系统提供的基本脚本服务之外,还有各种专门的胶水语言开发环境,特别适合研制能够把各种软件有机联合起来序贯运行的胶水程序。如果各个工具软件的操作是规范的,每步流程控制判据简单、可预先设计,就可以研发出一个胶水程序执行定义好的流程控制决策,将原来由人通过交互模式操作多个软件序贯完成的工作,由计算机执行胶水程序一次完成,实现模型组织管理工作的一键运行。这种用脚本胶水程序调用多个工具软件的操作模式也是操作自动化模式。
2.4 操作智能化
当问题复杂时,存在非标定制问题,或者是自动化规则的学习特别复杂,软件自动化建模不能应对。通过软件交互模式完成MBSE 应用,各个软件的使用和前后迭代联接是一个决策系列,这些软件操作需要智慧,不能预先设计,这种情况下脚本和胶水这些简单的操作自动化技术也就不能应对了。在自动化生成代码和脚本胶水程序的基础上嵌入决策环节,利用人工智能技术替代人完成这种决策,就可以实现建模和模型组织管理工作的一键操作。本文将这种利用人工智能技术加自动化技术完成的计算机自主操作模式定义为操作智能化。
实现操作智能化的方式有很多,但数字卫星建模是写计算机源程序,形成自动化操作胶水也是写程序,只要能用人工智能替代人写出需要的程序,MBSE 中建模和模型组织管理工作都是可以实现智能化的。
3 不同粒度数字卫星建模工作模式可行性分析
原理上编程开发模型可以完成任何难度的建模工作,这个操作模式的定性分析不需要进一步论述。操作自动化主要依赖于建模工具是否支持命令行接口,支持命令行接口并没有技术上的困难,主要取决于使用者的需求。软件交互模式需要有一个团队开发出通用的程序,操作智能化取决于人工智能的水平,这两种工作模式需要深入分析。
点模型基本上不考虑卫星之间的差异,不同卫星只是参数不同,所以很容易研制出成熟的商业软件,比如STK。流模型不考虑子系统之间的耦合,卫星的个性化特征不明显,流模型基本上可以用在不同卫星上。有限人力成本加上通用性,也能够顺利发展成商业软件,如构型软件ProE、结构软件ANSYS 等。问题的关键在于是否可以用一个通用的商业软件构建卫星的场模型?
多动态、多空间尺度、多物理场耦合是卫星场模型的基本特征,目前已有的商业软件不支持构建数字卫星场模型所要求的多物理场耦合。但多物理场耦合是各行各业在应用数字孪生系统时都遇到的问题,单纯解决多学科耦合问题是有成熟方案的,它就是欧洲仿真协会推出的Modelica 这种面向对象,以方程为基础的开放性语言。Modelica 是基于微分代数方程计算的动态性能仿真模型二次开发语言,其数学描述是微分、代数和离散方程组,支持机械、电子、通信、控制、液压和动力等学科的统一建模。Modelica 相对其他工具最核心的优势,就是能够决定如何自动求解方程变量,能够使开发者集中精力于建立对象的数学模型,而不必过分关心模型求解和编程实现的过程。但是,Modelica 只是解决了单一动态、单一空间尺度的多物理场耦合问题,它不能解决多动态问题,更不能解决多空间尺度、多物理场耦合问题。在数字卫星场模型的多动态问题上,微分方程级的刚性问题一直是个难题。目前,根据研究目标,通过调整模型粒度解决这个问题。比如重点关注轨道周期类特征时,就可以不考虑微振动。在考虑微振动和姿态运动耦合影响时,首先在ANSYS 等力场软件中离线计算弹性模态,然后只取模态前几项,将模态参数换算为平动耦合矩阵和转动耦合矩阵,以防止出现微分方程组的刚性问题。Modelica 通用的微分方程求解器,是否可以不需要人干预自动完成多动态仿真求解,这取决于微分方程级的刚性问题数值求解算法能否在短期内有突破。多空间尺度、多物理场耦合更加复杂,建模首先应解决按什么尺度划分有限元,每个尺度上是否考虑所有物理场的耦合这些问题。给定一个卫星,解决这些问题不难,但很难给出适用于所有卫星的通用结论。如果都按最精细的粒度划分,就算方程可解,目前可用的计算资源也达不到实时仿真的要求。
通用软件开发一个更大的问题,是数字卫星的场模型的建模工作不是一次性可完成的工作,而是要在模型的应用过程中不断利用遥测数据对其修正,才能满足数字孪生系统物理世界与数字世界交互融合的要求,才能定量给出模型的不确定性,完成量化物理系统不确定性工作,并以不确定性的量化指标指导工程决策。一个典型的卫星需要500 多个遥测量,这些遥测量有的反映了卫星整体特征,有的反映子系统特征和部件特征。单单是修正模型中的参数,也不能500 个量放在一起用最小二乘算法修正,应先在点模型的粒度上,比对好6 个参数描述的轨道偏差。然后在流模型粒度上,比对各个子系统特性偏差,再在场模型上比对部件特性的偏差。只有在比对中发现问题所在,才能进行调整模型的工作。所以,场模型的构建过程不仅工作量大,如何调整模型也需要智慧。场模型的构建,需要根据卫星特点,根据物理空间的测量数据与仿真模型计算数据比对中出现的差异,把卫星场模型所覆盖的整个数字空间,按动态、空间尺度和物理场耦合程度这3 个维度分解成多个子空间,调整每个子空间上的模型粒度,掌握好精度和计算效率的平衡。
按目前点、流模型的研制思路,开发出一个能适用不同卫星,仿真粒度满足场模型要求的仿真软件是不可行的。
目前,一些商业软件一般都支持UI 人机交互界面和命令行两种操作模式,有的甚至有自己的二次开发语言、各种操作系统和云服务系统,也有丰富的命令行指令和胶水语言,所以支持操作的自动化肯定是可行的。智能化是增加了决策的复杂性,在技术手段上只要支持操作的自动化,原理上就可以支持操作的智能化。
根据上述分析,不同粒度数字卫星的建模操作模式可行性见表1。要构建数字孪生标准的数字卫星场模型,用软件操作的自动化技术是不可行的,需要人工智能技术。

表1 不同粒度数字卫星各类建模方式可行性分析Tab.1 Feasibility analysis of various modeling methods for digital satellites with different granularity
4 卫星工程中数字卫星不同粒度模型的收益代价分析
数字卫星粒度越细,收益越大,但代价也越大,评估了收益代价比之后才能决定采用什么粒度的数字卫星模型是最合理的。点模型是粗粒度,可以用在可行性论证阶段,不同粒度数字卫星可以用在卫星工程的不同阶段,一个卫星如果在所有部件理想的情况下都不能完成要求的工作,则卫星工程方案是不可行的。流模型是中粒度,可以用在投标方案初步设计阶段,如果在各个子系统的单机互不影响的情况下还不能完成要求的工作,方案一定是不可行的。点模型和流模型都没有涉及单机之间的耦合,只有场模型才涉及总体的精细协调问题。没有场模型的支持,总体设计人员的决策只能是依据经验和定性分析,达不到MBSE 的要求。场模型是MBSE 应用在卫星工程实践中的关键,场模型精度越高,系统总体协调的能力越强,场模型不确定性的大小是制约卫星功能密度的瓶颈。
场模型的不确定性再细分为两个粒度,粗粒度只解决有无的问题,细粒度考虑度量的问题。粗粒度解决有无问题,只要在建模中考虑部件多物理场耦合就行,本文定义为开环场模型。细粒度要给出模型不确定性的大小,一定需要真实遥测参数和仿真参数比对的环节,本文定义为闭环场模型。
开环场模型,只能是利用前期工程实践掌握的知识,根据研制卫星的特点,利用推理得出数字卫星的模型。开环场模型可以用于指导子系统协调等决策,但由于没有模型不确定性的度量,不能替代性能测试相关的地面实验,所以对卫星研制流程没有太大的改进。开环场模型有价值,但不是颠覆性的技术。但因没有物理世界与数字世界的比对环节,它只涉及系统工程中对应的建模技术。由于省掉了模型组织管理的工作,开环场模型的工作量肯定是大大降低了。
闭环场模型达到了数字孪生系统的要求,数字孪生是新一代工业革命的基础,原理上可以在数字世界穷尽系统生命期所有的可能性,找到最优策略。闭环场模型有不确定性度量,可以部分替代昂贵的地面试验,改变卫星研制运行流程,其是颠覆性的技术。相对于开环,这有物理世界和数字世界多次比对反复修正的环节,代价肯定会提高。各类粒度数字卫星模型的收益代价比较见表2。

表2 各类粒度数字卫星模型的收益代价比较Tab.2 Comparison of the benefits and costs of digital satellite models with various granular
模型的组织管理工作主要是模型修正和数值比对,相对来说工作比较规范,和建模工作比,对智能水平要求较低,付出的代价有限,但得到的是颠覆性卫星研制技术,数字卫星的闭环场模型性价比是最高的。很难设想,一个团队会花巨大精力构建个性化的高精度卫星模型,却不进一步与遥测等数据进行比对分析。只建模不验证,这不符合系统工程原理。
点、流模型都可以使用通用的软件,研发工作可以是一次性的,所以很容易推广,实践中发现的问题,可以通过版本更新不断改正。但是,数字卫星场模型是个性化的,开环场模型都不能通用,闭环场模型还需多次比对修正,这些工作都需要人参与才能完成。如果参数优化调整后物理世界与数字世界的一致性达不到要求,还需要人进一步调整仿真模型。这些工作并没有太多需要突破的关键技术,但需要人做决策。数字卫星场模型的建模工作和模型的运行组织管理工作都依赖于人,而且建模是个迭代过程,每步迭代时还依赖模型管理工作,会造成构建卫星场模型的工作量巨增。卫星系统的复杂性和庞大性造成了建模工作和运行组织管理工作量太大,所需的人力成本太高、等待时间太长,这些是限制高精度卫星模型普及应用的根本原因,是MBSE 应用在卫星工程中首先需要解决的问题。
5 数字卫星场模型建模与模型组织管理操作的智能化
成本是限制MBSE 应用在卫星工程的主要问题,航天工程都有严格的研制进度要求,许多空间资源都是先到先得,晚了就没有意义了,所以数字系统的构建时间极为重要。一些重要决策,不是不知道需要MBSE 的支持,而是时间上实在等不起,只好定性或简单定量分析后完成决策。如果能实现数字卫星工程的智能化,性价比最高的闭环场模型建模和模型管理工作都可以用人工智能取代人,这将极大提高MBSE 的应用能力。
人在书写数字卫星仿真源程序时要做各种各样的决策,从软件工程的角度来看,这些决策包括源代码系统的组成、结构和模式等。系统组成上可以细划为确定每个工程、每个文件、每个函数和函数的算法。结构上确定这些组成之间的关系,如何设置工程全局变量、文件全局变量和函数调用关系。如果将书写源程序的每个决策都用人工智能代替,就可以实现数字卫星建模工作的智能化。
直接用目前的某种人工智能技术取代人完成这些软件工程决策尚不可行。根据认知理论,人也是通过逻辑思维,将大问题分解为多层结构的小问题解决的。多层结构上下层结点联接关系是个网络,一个下层结点可能支撑多个上层结点。人有复杂逻辑推理能力,处理层节点交叉没困难,但让人工智能具备这个逻辑推理能力,目前的技术水平仍然是不可行的。
决策论是系统工程重要的组成学说。系统工程中有个重要的概念是维,常用的维有逻辑维、时间维、空间维和系统维。维是一种不重不漏的分解方法,所以维具有正交性。如果用维对一个问题进行分解,由于维的正交性,每次分解后小的决策互不相关,一个下层结点只支撑一个上层结点,所以维分解形成的是树结构。
对一个决策,每次选一个合适的维进行分解,形成子决策,对每个子决策再选合适的维进行分解,形成各级决策。当某级子决策被分解到足够小时,可以找到某种类型的人工智能技术替代人完成这个决策,就不再分解,最终形成了一个决策树。将最初要完成的决策定义为树的根决策,它是下层可以称为干决策和枝决策,分解到能被人工智能取代的最小子决策称为叶决策。利用最合理的人工智能技术完成叶决策后,由于树结构没有交叉,就根据树结构逐步合成,替代人完成各级枝干子决策,最终替代人完成树决策。
将书写源程序的每个决策,都按此方法用人工智能代替人完成决策,研制出了数字卫星人工智能程序员。它可以根据一个卫星的格式化描述,用C/C++代码自动书写出数字卫星仿真源程序。此处用到的人工智能技术主要包括计算智能、推理和机器学习。
一个数字卫星由运行环境模块、机电热光磁多物理场耦合模块、卫星各子系统零部件模块、星载姿态控制系统软件和星载星务管理软件5 大部分构成。一个卫星零部件一般会用在多个卫星上,姿态控制和星务管理基础算法也有一定通用性,原理上没有必要每个底层函数都由人工智能程序员书写。实际上,对于同一个卫星零部件,不同的场合对模型逼真度的要求是不一样的,一个部件可以有多个不同粒度的模型,由人工智能程序员根据当前要求选择仿真精度与计算量最合适的粒度模型。不同卫星,最主要区别是整星尺度多物理场耦合模块与各部件关联耦合模型不同。
这个人工智能程序员已完成了多个数字卫星仿真源程序的开发工作。利用它研制的我国新一代数据中继卫星的动态模拟器,已经完成了与卫星操作单位开发的地面测控软件的对接演练,证明了人工智能程序员可以胜任复杂卫星数字系统的研制工作。数据中继卫星动态模拟器的主控界面如图1 所示。

图1 数据中继卫星动态模拟器主控界面Fig.1 Main control interface of data relay satellite dynamic simulator
数字卫星人工智能程序员还书写了M5 卫星的仿真程序,利用M5 卫星的遥测数据,在一个轨道周期内,对M5 卫星400 多个独立遥测物理量进行了模型比对修正,最终99%遥测物理量模拟数据的数据偏差与遥测参数正常变化范围的比值在10%之内。
遥测参数与仿真模型输出参数比对是个分层迭代过程。先比系统级的参数,然后比子系统级参数,最后再比部件级参数完成一次迭代过程。在最理想情况下,就算整星尺度零部件模型的粒度不需要调整,也要多次迭代后才能完成参数比对工作。
系统级主要是和卫星飞行环境相关的参数,比如卫星飞行轨道,单纯定轨可以得出一组数据,实际上卫星与天体相对位置对供电和外热流都有显著影响,结合这些子系统中关键部件遥测参数与仿真参数的差异,可以进一步修正飞行轨道。系统级轨道参数的比对结果如图2 所示。
姿态控制子系统几乎与其他子系统都有很强的耦合关系,除了描述被控对象的动力学模型,姿态控制子系统可以再细分为敏感器、控制器和执行机构3 个部分。一般来说,控制算法带来的不确定性最小,敏感器误差,特别是敏感器误差中的常值项对子系统控制能力影响最严重。姿态控制子系统典型敏感器部件级比对的部分结果如图3所示。
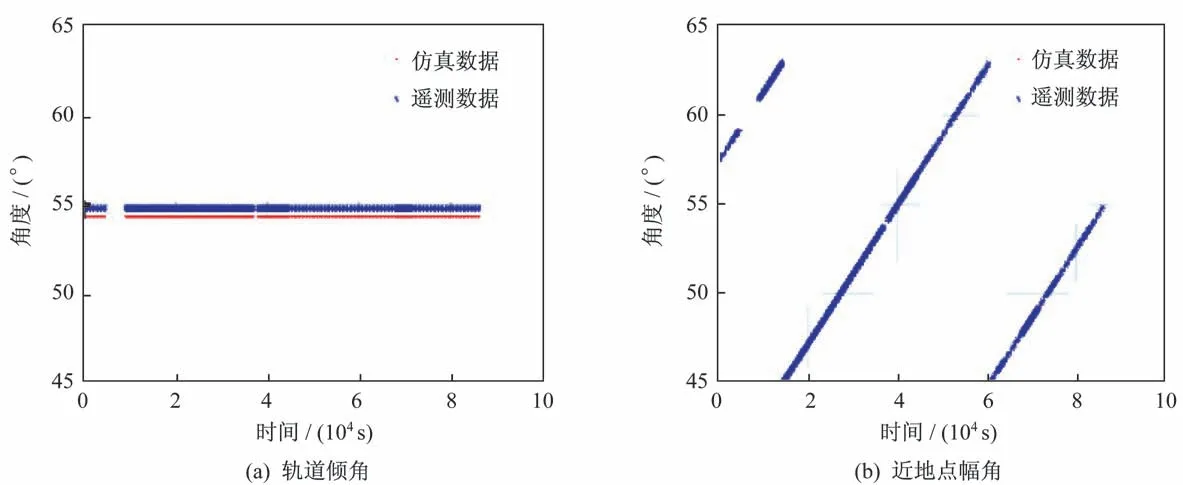
图2 轨道比对修正结果Fig.2 Model modification results of orbit control
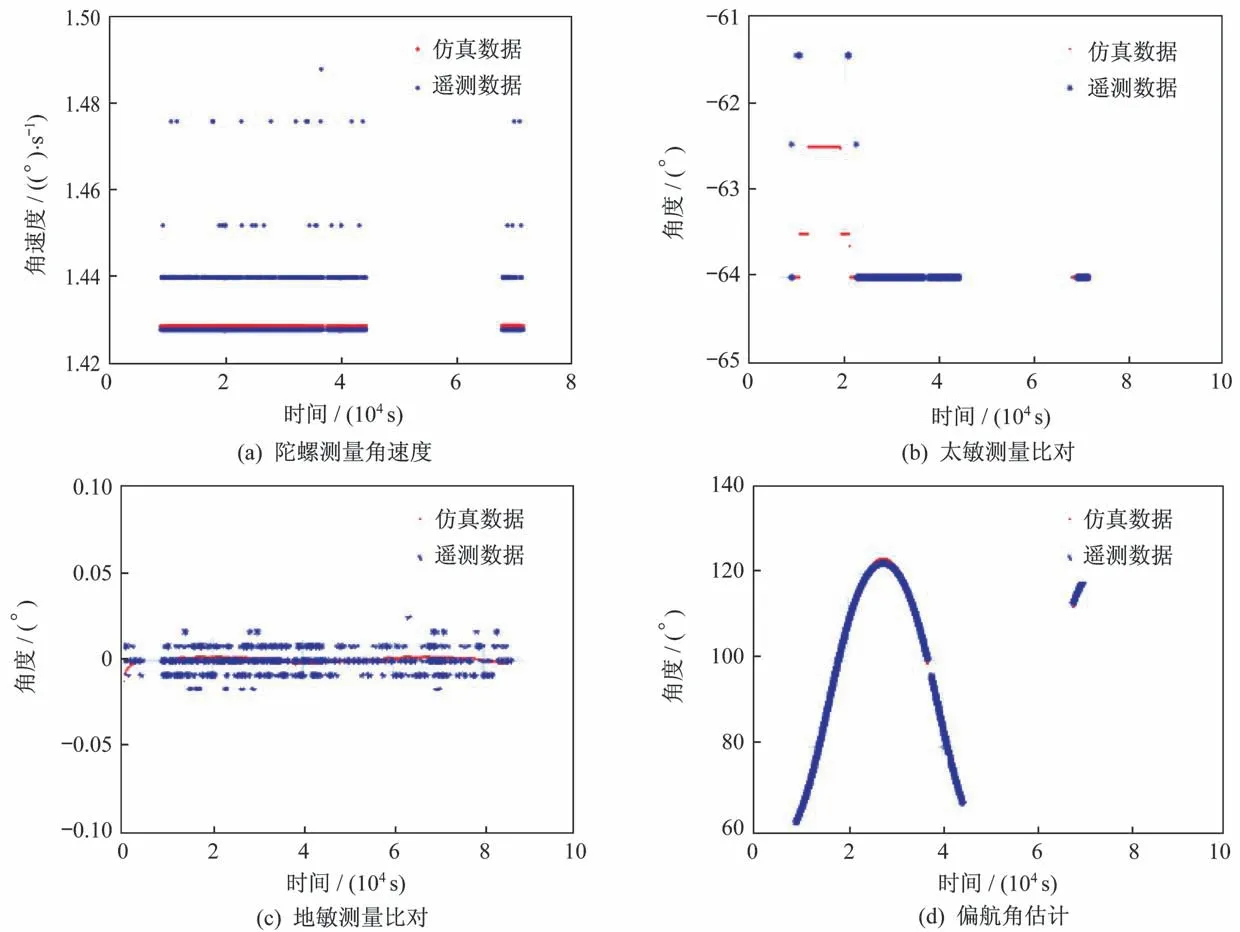
图3 姿态比对修正结果Fig.3 Model modification results of attitude control
电源子系统中最关键的部件是产生电能的太阳帆和起蓄能作用的电池组,电源子系统和关键部件比对的部分结果如图4 所示。
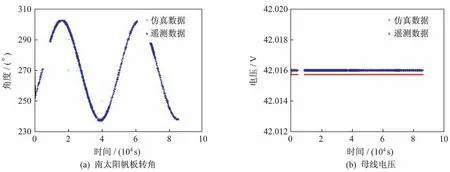
图4 供电系统比对修正结果Fig.4 Model modification results of power supply system
许多部件的工作性能受温度影响,卫星上一般有多个传感器布置在不同的位置上。热控子系统的难点在于模型粒度的描述,热场有限元粒度的划分必须综合考虑精度和计算效率的要求,有限元粒度细划分数量多,精度肯定提高,但计算效率会有很大损失。温控子系统某个测温计比对结果如图5所示。
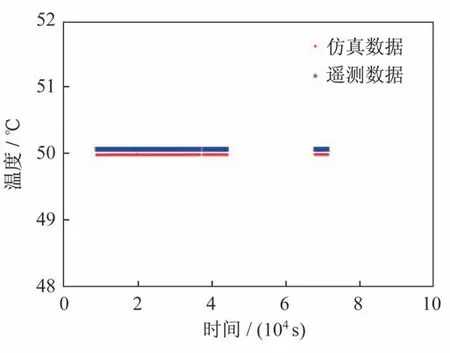
图5 某测温计比对修正结果Fig.5 Model modification results of a thermometer
燃烧是个非常复杂的过程,要想达到实时计算要求,燃烧模型必须大大简化。推进子系统主要状态是温度和压力。推进子系统关键部件比对结果如图6 所示。
利用决策的维分解和各种类型的人工智能技术,还可以根据仿真任务的不同要求和数字卫星的不同特点,自动生成批量仿真工况输入文件,所有的工况仿真完成后,它可以书写仿真结果统计分析程序、绘图程序和报告生成程序。计算机可以自动对每个工况输出数据进行多级统计,并根据统计数据生成文字图表,形成PDF 格式的仿真报告。

图6 燃箱压力比对修正结果Fig.6 Model modification results of fuel tank pressure
6 结束语
卫星的建模难度体现在不同的卫星,其多动态、多空间尺度、多物理场耦合的粒度分布不一样,用一种数学描述,开发一套各卫星通用的仿真程序是不可行的,需要通过真实物理系统遥测参数针对性地修正数字系统的模型和参数,达到模型精度和计算效率的平衡。由于卫星系统的庞大性,建模和模型的组织管理都需要巨大的人力资源。成本是限制基于模型的系统工程应用在总体设计上的根本原因。利用现有的人工智能技术,依据系统工程原理,建模和模型管理工作是可以智能化的,成本是可以降低的。
我国工业软件的技术积累不足,影响了总体设计技术的发展,但利用最新的多物理场耦合仿真工具实现弯道超车,并没有解决数字卫星建模的根本问题。卫星最重要的姿态控制子系统和星务管理子系统的核心部件是星载计算机,它的主要功能是通过软件实现的。星载计算机的硬件资源极为有限,我国甚至要通过非标定制等手段将硬件资源压榨到极限才能满足性能要求,星上代码一般用C/C++语言书写。要实现数字孪生,数字系统的星上代码最好是与真实卫星的星上代码一致。开源软件知识产权问题相对简单,但开源软件也是针对各行各业的需求构建的通用系统,本单位的研发人员要学会按别人的思路裁剪,建模和模型组织管理工作量更大,技术难度和风险也更高。
将基于模型的系统工程应用于卫星工程,其中最重要的技术积累是卫星建模和模型组织管理的自动化智能化技术。
