小型水域水面水底垃圾清理机器人设计
2021-03-01胡梦杰梁润智李章诚李欣蓓
胡梦杰 梁润智 李章诚 李欣蓓

摘 要::针对小型水域中没有专门的垃圾清理机器,为此我们设计了一款绿色能源的小型水域水面水底垃圾清理机器人。机器人采用了太阳能作为能源补充。采用BDS巡航系统实现自主路径巡航规划。同时搭载了太阳自动追踪系统,结合路径规划,保证太阳能发电板最大的工作效率。采用视觉信息采集技术进行垃圾信息收集。机器人实现了可长时间实时垃圾清理,该机器人使用绿色能源解决了小型水域的垃圾污染。
关键词:BDS区域巡航;视觉识别;太阳能自动追踪
引言
目前,学校、小区、景区的小型天然湖或者人工湖等小型水域中的漂浮物和水底垃圾主要采用人工手持网兜来进行清理。因为人群聚集,流动性大,容易产生新的垃圾,因此此类小型水域存在着水面垃圾清理不彻底,耗时长,效率低,劳动强度大与水底垃圾清理不到等弊端。市面上的水面水底垃圾清理装置,往往不适用于小型水域的垃圾清理。小型水域水面水底清理机器人的设计,减少了人力劳动,可以随时随地的清理水面水底垃圾,减少水域污染,美化环境,同时利用太阳能减少了能源消耗。可以满足学校,小区,景区的使用。
1、系统设计
系统设计框图如图1所示,太阳能板负责为整个机器人提供能源补充,通过无线充电的方式为水下部分提供能源补充。机器人的动力主要靠螺旋桨进行控制,通过PID算法实现在水面和水底能够平稳的进行移动。水面部分的垃圾收集通过翻斗翻转倒入垃圾筐,水底垃圾收集通过机械臂收集放入垃圾筐内。通过摄像头采集水面水底的垃圾信息通过物联网模块将信息传输到云平台,通过云平台的垃圾识别功能快速的实现垃圾识别,通过云平台数据处理能力,减少中心控制器的消耗。通过微信小程序连接云平台可以获取实时的视频信息,通过云平台的信息存储功能可以获取前段时间的机器人的各种信息以及垃圾收集的信息。BDS巡航系统通过北斗定位模块的定位信息实现区域巡航,同时通过位置信息获取到当地的天气情况信息,辅助太阳能追踪系统,确保太阳能板的发电效率保持在最高的状态。
无线充电系统基本流程如图2所示。当电路工作时,利用产生的振荡作用使电路发出一个脉冲频率,再通过逆变电路传给变压器的原边,即发射圈。这样就使得发射线圈周围产生磁场,当其与接收线圈距离较近时,就能够产生相应的感应电流,经过整流和滤波电路,最终得到所需要的充电电压和电流。当发射线圈与接收线圈距离控制在一定范围以内时,可以实现近距离无线充电功能。
經典PID对于非线性时变系统的动态响应特性差,KP、KI和KD参数无法在线自整定,难以满足系统对变化工况的性能要求.设计采用反向传播(back propagaton,BP)神经网络,利用其自学习特性实现对PID参数自适应整定,从而改善系统静态特性和动态特性。
3、系统结构
一、云平台图像处理与数据分析技术
物联网数据分析LA(Link Analytics)使我们能更好的掌握小型水域中垃圾的分类,垃圾集中分布的位置,新垃圾产生的主要时间与位置。通过这些数据的分析,能更好的进行实时的垃圾收集与处理,同时根据数据可以对垃圾种类的不同对机器人的收集装置进行更改。云平台的图像处理技术更加的成熟,可以节省机器学习的时间,提高了视觉识别的精度。借助于物联网云平台实现方便快捷的数据结构化存储,远程调试和监控。
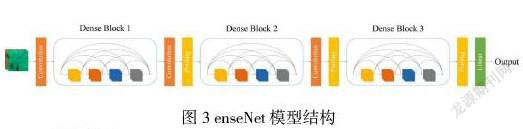
二、水下图下像增强算法
算法的模型结构如图3,实现方法是通过依赖大量的水下图像,清晰的水下图像能有效提高检测精度,对水下垃圾检测具有重要的影响。光在水中传播遇到悬浮粒子会发生散射,前向散射会产生图像细节模糊;后向散射会造成雾状模糊,导致图像缩小下降。CL AHE通过对图像分块进行直方图变换可以有效地提高图像亮度,并利用线性插值算法提高速度,但CLAHE会造成图像颜色失真,并且不能从水下图像色偏。MSRCR是基于Retinex理论提出的图像。增强算法,Retinex理论认为一幅图像可以表示为两部分:光照量和反射量。ACE通过计算目标点与其他提示点的差值,得到返回点之间的亮度差异信息来校正校正值。首先通过对图像的色彩域空域调整,完成色差校正,然后对RGB三通道分别进行线性扩展与动态拉伸最终图像。ACE能够更好地处理图像细节,实现色彩校正并提升图像亮度和而基于物理模型的方法主要根据图像退化过程进行数学建模,并进行参数估计,反演得到清晰的图像。
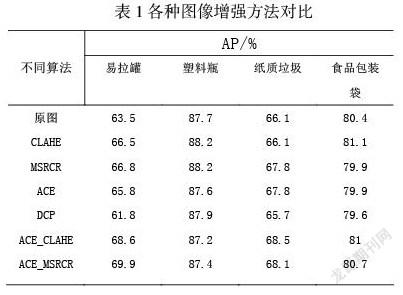
表1所示采用通过CLAHE,MSRCR与ACE增强后的图像训练,mAP均能提高1个左右。其中对易拉罐的检测精度,CL AHE提高了3%,ACE提高了2.3%,MSRCR提高了3.3%,这说明增强后的图像更有利于目标检测。同时,经过DCP处理的图像,不同类别的AP均降低,mAP降低了0.6%,因此DCP并不适用于水下图像增强与复原。在由常规算法对图像进行初步的基础上,优化后的ACE_ _CLAHE与ACE_ _MSRCR也表现出良好的效果。通过ACE_ _CL AHE增强的图像,和原图比例,易拉罐AP提高了5.1%,纸质垃圾AP提高了2.4%。
机器人通过自身所带的传感器,将水面水底垃圾信息,水面水底周围环境信息,自身状态信息。通过物联网模块将数据传输到云平台进行数据处理,处理后的数据返回到中心控制器中。机器人通过处理后的数据实现垃圾识别、垃圾收集、自动巡航、能源补充、潜水深度控制、机器学习。云平台在实际应用中不断的进行机器学习,对该水域中的垃圾进行分类。整理出不同种类垃圾数量的多少,分布区域,加强对该区域数量多垃圾种类的识别。同时将云平台中不断学习的数据包在每隔一段时间后返回到树莓派中,减少树莓派的学习时间。同时在出现机器人与云平台连接不上时,树莓派可以继续运作,进行垃圾识别。
参考文献:
[1]郝琨,王阔,赵璐,王贝贝,王传启.基于图像增强与改进YOLOv3的水下生物检测算法[J/OL].吉林大学学报(工学版).2021-05-11:1-11.
[2]梁永峰,李正,宋翔宇.手机近距离无线充电系统设计及仿真[J].沧州师范学院学报,2020,36(02):43-46+59.
[3]曹朝阳,叶会英.水下机器人的无线充电研究[J].吉林大学学报(工学版)2018(08):64.
[4]王奔,牛洪海,徐卫峰,蔡丹,陈俊.基于PLC的槽式光热太阳能追踪控制系统的研究与应用[J].中国电力,2020,53(11):185-194.
