基于磁链优化模型的感应电机转子时间常数辨识
2021-02-23蔡美东聂雅萍王晓光
赵 云,蔡美东,聂雅萍,王晓光
(湖北工业大学 太阳能高效利用及储能运行控制湖北省重点实验室,湖北 武汉 430068)
要想提高感应电机间接转子磁场控制系统的控制精度,就必须准确获取转子时间常数Tr(Tr=Lr/Rr)。尽管在电机运行前采取各种方式对Tr进行离线测量,但在电机运行时,Tr与转子电阻、转子电感有关,其中转子电阻受到温度等因素影响,而转子电感受到电机磁场影响[1-2]。Tr的不准确,会使转子磁场定向出现偏差,导致电机输出转矩不能得到准确控制,因此在线辨识Tr是非常必要的。
在众多Tr在线辨识方法中,基于模型参考自适应(model reference adaptive system,MRAS)的Tr辨识方法由于较低的运算量和较高的性能而受到广泛关注[3]。在感应电机Tr辨识中选择不同的模型,可以构成不同的MRAS系统。文献[4]基于转子磁链q轴分量模型构成辨识系统,采用电压模型获取q轴的转子磁链,实现Tr辨识,但该方法需要获取定子电压,会受到死区效应的影响。文献[5]为了实现d轴电压模型在工程上的应用,考虑了定子电阻、死区效应补偿方案来提高Tr的辨识精度,但忽略了转子电感对Tr的影响。文献[6]采用电磁转矩模型来辨识Tr,但辨识系统存在错误平衡点,使得其仅适用于电机重载工况。文献[7]提出一种基于无功功率模型的Tr辨识算法,并验证了该模型的稳定性,但该方法不适用于四象限运行辨识区间。文献[8]采用转子磁链和定子电流的点乘模型的Tr辨识方法,解决了死区效应的影响,但该方法需要转子磁链,而磁链观测中的纯积分运算又存在直流偏量的问题。为此,文献[9-10]计算了定子磁链中的直流分量,并采用反馈PI控制来抑制观测磁链的直流偏量,但是输出磁链的直流分量仍不能完全抑制。文献[11-12]把纯积分器换成低通滤波器,能很好地抑制直流分量的问题,但低通滤波器的存在会导致磁链幅值、相位产生偏差。
为了解决纯积分问题对定子磁链观测的影响,本文研究一种基于直流偏量双闭环的方案去优化磁链观测器,并采用优化后的磁链观测器与定子电流和定子磁链的点乘模型,实现感应电机Tr的在线辨识。
1 转子时间常数不准确对磁场定向的影响
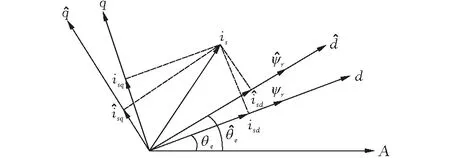
在感应电机间接磁场定向控制系统中,磁场定向角θe观测模型如图1所示[13]。

图 1 磁场定向角观测模型
当磁场处于稳态时,微分项为零,则磁场定向角θe可表示为:
(1)
2 转子时间常数的在线辨识方法
2.1 感应电机数学模型
在d、q轴同步旋转坐标系下,感应电机动态数学模型[14]如下:
(2)
(3)
(4)
(5)

稳态时,公式(3)的微分项为零,并将式(3)和式(5)代入式(4)中可得到稳态的定子磁链,进而求得其表达式:
(6)
(7)
2.2 基于定子电流和定子磁链点乘的Tr在线辨识方法
图3给出了基于定子电流和定子磁链点乘的Tr辨识实现框图。定子电流和定子磁链点乘的参考模型如式(8),可调模型如式(9),自适应率如式(10),模型偏差ΔM=Mref-Mest,定子电流和定子磁链的点乘值不受坐标系限制,即两相静止坐标系下的点乘值isαψsα+isβψsβ和两相同步旋转坐标系下的点乘值isdψsd+isqψsq相等。
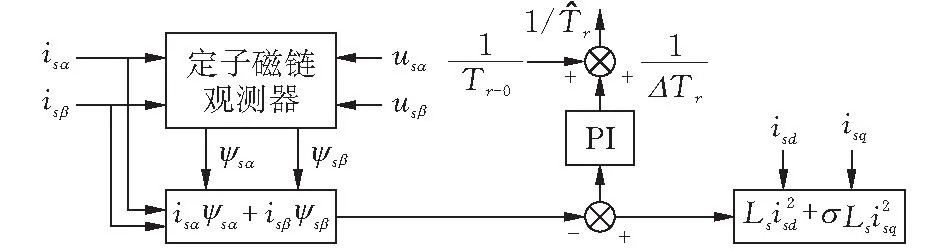
图 3 转子时间常数辨识框图
Mref=isαψsα+isβψsβ
(8)
(9)
(10)
其中Tr-0为初始转子时间常数,ΔTr为转子时间常数偏差的补偿值,Kp、Ki分别为PI调节器的比例系数、积分系数。
将稳态定子磁链式代入式(8)可得:
(11)
在定子磁链观测器中,通常会忽略输入直流偏量的影响,使得磁链的观测值产生偏差,为此设计一种磁链优化模型。
3 磁链优化模型
当忽略输入直流偏量时,稳态下定子磁链与反电动势的关系如下式:
es=jωeψs

当考虑输入直流偏量时:

因此,为了解决纯积分的影响,消除输入的直流偏量,可设计闭环调节系统,直流偏量Δd经过补偿增益Kd模块在积分器前端进行补偿(图4)。
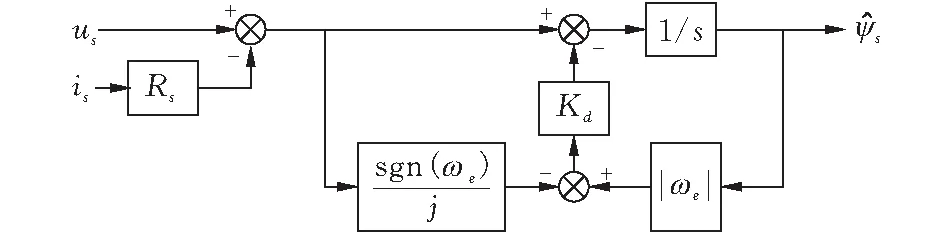
图 4 考虑直流偏量补偿的磁链观测器
由图4得到系统的传递函数如下式:
图5a表示相同定子频率,不同Kd的Gψ0(s)Bode图,取ωe=314 rad/s,Kd分别取0.1、1、10。图5b表示相同Kd,不同定子频率的Gψ0(s)Bode图,取Kd=10,ωe分别取31.4、314、628 rad/s。
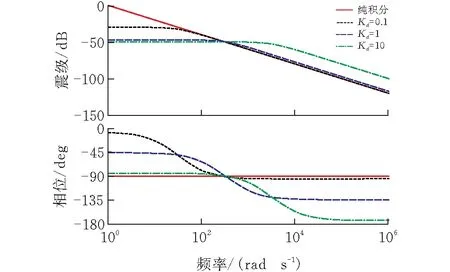
(a)相同定子频率,不同Kd
由图5可知,减小定子频率,磁链观测器的响应速度会变慢,而增大补偿增益Kd会提高磁链观测器的动态性能,但又会降低其对高频噪声的抑制能力。为此将Kd设计成如下式的函数:
其中,ωc为截止频率,通常为所选电机额定频率的5%~20%;C为临界积分系数,通常取1~10。
但上述观测器有一个明显的缺点是消除直流偏量的速度较慢,为此在图4的基础上再并联一条补偿积分模块,优化后的磁链观测器框图如图6所示。
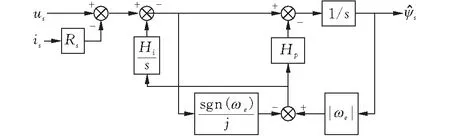
图 6 优化后的磁链观测器
由图6得到系统的传递函数如下式:
当系统处于稳态时,上式可化简为:
由此可知,稳态情况下,优化后磁链观测器的定子频率响应和积分器完全一致,可以完全消除纯积分问题,实现定子磁链准确观测。优化后的磁链观测器实现框图如图7所示。
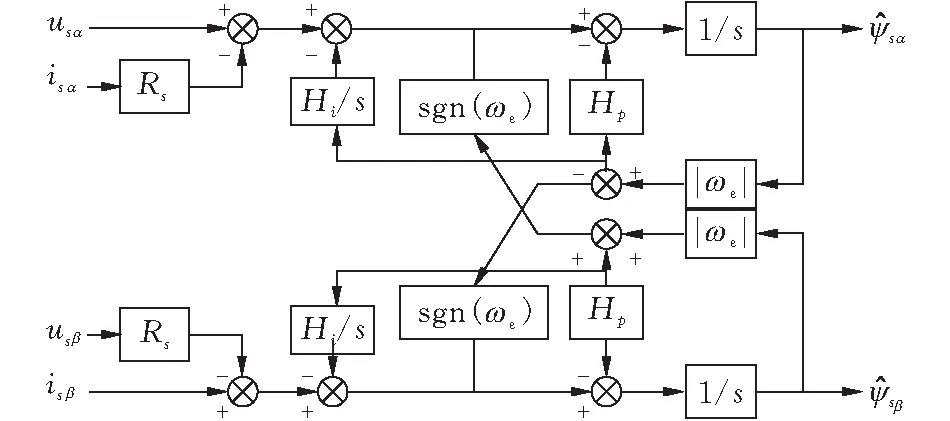
图 7 优化后的磁链观测器实现框图
由图7可知,优化后的磁链观测器含有两个参数:Hp、Hi,其中,参数Hp的选择仍遵循Kd设计思路,Hi可以消除定子磁链直流分量的影响,对参数Hi的设计参考典型二阶系统设计方案,此时可得:
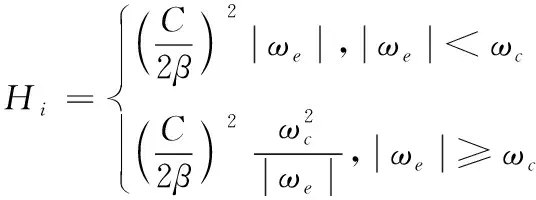
图8给出了优化后的传递函数Bode图,按照上式分别取阻尼比β为1、2、5。可以发现β增大,参数Hi减小。当β增大到无穷大时,Hi减小到0。
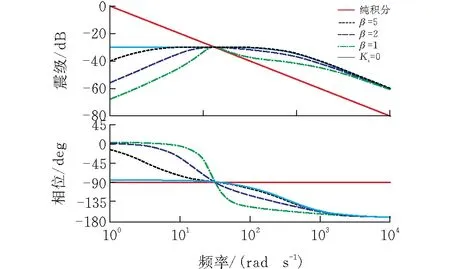
图 8 传递函数Gψ(s)的Bode图
由图8可知,当Hi减小到0时,相当于只存在补偿Kd增益,而伴随着β的减小,参数Hi增大,加快了消除直流偏量的速度。同时减小阻尼比β会在频谱响应图中形成一个凸峰,会造成系统不稳定,因此需要择优选取参数C、β、ωc。
4 仿真研究
基于以上分析,在间接转子磁场定向控制系统中,采用优化后的磁链观测器,在Matlab中建立如图9所示的基于定子电流和定子磁链点乘的Tr在线辨识系统框图。
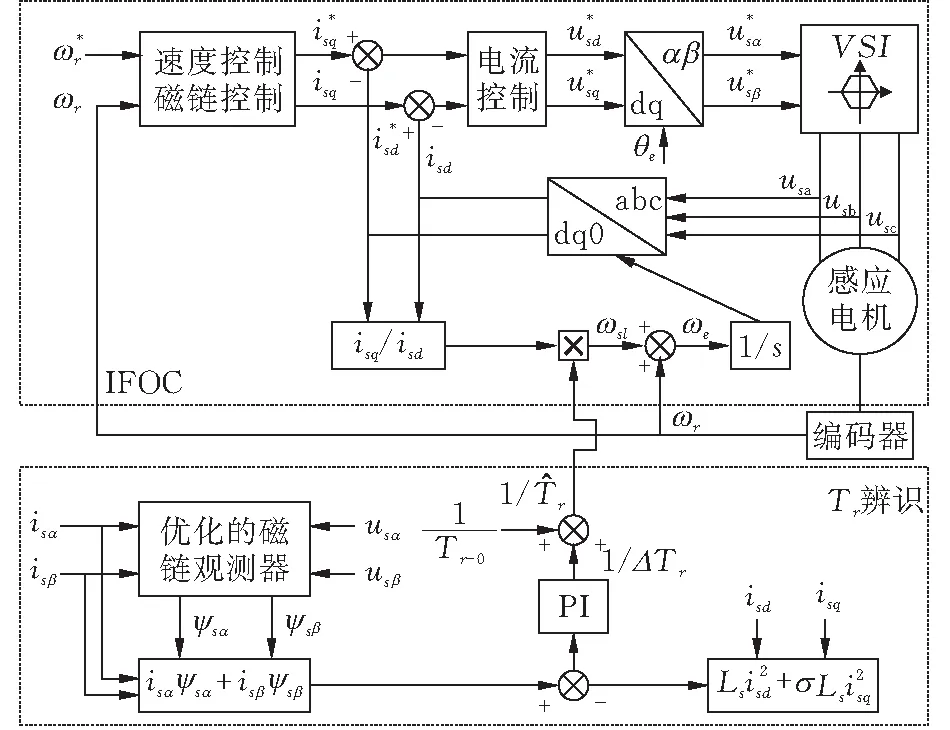
图 9 间接转子磁场定向控制系统框图
仿真所用参数以3.7 kW感应电机参数为参照(表1)。
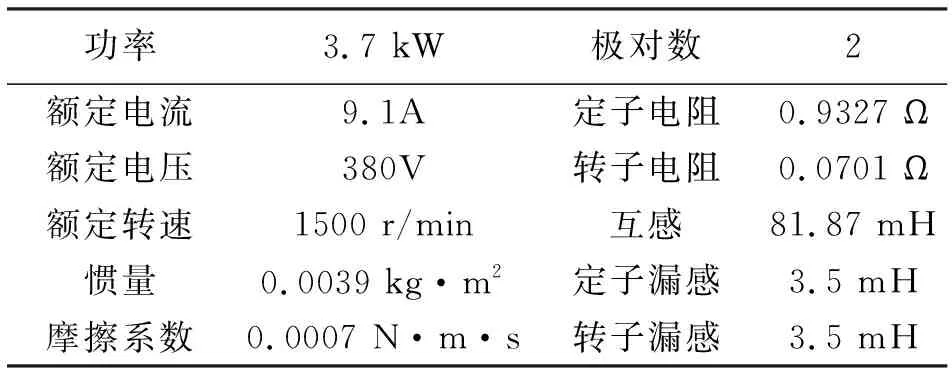
表1 电机参数
从电机参数可计算出
首先对定子磁链观测器进行仿真验证,给定电机转速314 r/s,在0.5 s分别给电压usα,usβ施加1V和-1V的直流偏量电压,图10a、b分别为优化前后定子磁链观测曲线。

(a)优化前
由于积分器的影响,观测的定子磁链中含有直流分量,以至于降低了定子磁链观测精度。如果将图10a中定子磁链观测值直接用于辨识Tr,那么Tr观测值会出现很大的偏差。而图10b中磁链观测值稳态时没有直流偏量,具有更高的观测精度,更适用于辨识转子时间常数。
下面对基于优化后磁链观测模型的Tr辨识方法进行仿真验证,对感应电机施加5 N·m的负载,当电机运行稳定1 s后,启动Tr在线辨识方法。图11a表示初始转子时间常数偏小的辨识结果,图11b表示初始转子时间常数偏大的辨识结果。

图11 转子时间常数辨识结果
从辨识结果可知,当初始转子时间常数为0.08 s时,启动辨识算法,如图11a所示,辨识时间间隔约为0.5 s,最终Tr被修正到0.12 s左右,对于图中出现的明显尖峰,主要是由于PI调节器的系数设置过高的影响,但如果降低PI调节器的系数,削去尖峰,会使得辨识时间延长。当初始转子时间常数为0.16 s时,启动辨识算法,如图11b所示,辨识时间间隔约为0.5 s,最终也被修正到0.12 s左右。所以无论初始转子时间常数偏大还是偏小,在启动辨识算法之后,估计的转子时间常数能很快得到修正。
进一步验证所提出辨识方法的有效性,在磁场定向控制系统中,给定转速1500 r/min,3 s后突加10 N·m负载,4.5 s降低负载为5 N·m,6 s降低转速到1000 r/min,对有无Tr辨识系统分别进行仿真,观测控制系统电机转速和输出转矩响应曲线(图12-13)。
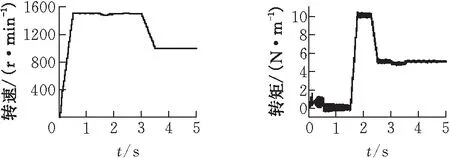
图12 无Tr辨识的转速与输出转矩响应曲线
如图12所示,在磁场定向控制系统中,当不启动Tr辨识方法,电机空载启动,给电机突然加、减负载,都会使电机转速和输出转矩出现较大的波动。如图13所示,在磁场定向控制系统中,当启动Tr辨识方法后,电机的转速和输出转矩响应曲线都比较平稳,具有较好的动态响应效果。
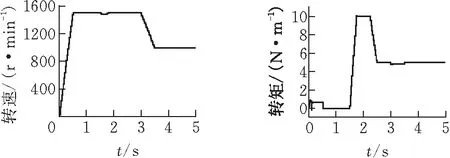
图13 有Tr辨识的转速与输出转矩响应曲线
5 结论
针对Tr不准确造成感应电机磁场定向出现偏差的问题,构造了基于定子电流和定子磁链点乘的Tr在线辨识方法,优化了基于直流偏量补偿的磁链观测器,并利用该观测器准确获取了定子磁链。对该辨识方法的仿真结果表明:该辨识方法准确有效,可改善感应电机间接转子磁场控制系统的性能。