水田植保机滑转率的田间测量
2021-02-23刘嘉程周敬东
陈 正, 刘嘉程, 周敬东
(湖北工业大学农机工程研究设计院,湖北 武汉 430068)
植保机械是现代化农业生产中不可缺少的重要农业机械,在农业生产中发挥着重要的作用[1-2]。植保机大多时间工作的水田环境属于泥水混合环境,水田植保机在作业行走过程中驱动轮经常有滑转现象,当滑转率过大时,甚至导致植保机原地打滑,不能前进[3]。植保机过度滑转时,车轮在泥水空转,也可能会造成驱动轮向下沉陷,直接导致植保机底盘与泥水接触,致使植保机无法正常工作[4-5]。滑转影响着植保机在水田行走时各项性能的发挥,因此,只有在容许的滑转率条件下,植保机才能够充分发挥自身的驱动能力。为了保证植保机在水田工作时有较高的工作效率,必须控制其驱动轮的滑转率。因此,对植保机的滑转率测试研究就显得非常重要。
1 测量方法
1.1 车轮转速的测量方法
滑转率是实际车轮轮速与实际行进速度的差值和实际车轮轮速的比值。为保证滑转率的精确度,本文采用CM16-65P-1-24型霍尔传感器,来测量植保机的前后车轮的转速。该传感器有3个引脚,分别为正极、信号极、负极,直接输出的是数字量,具有灵敏度高、输出信号稳定、频率响应高、抗干扰电磁能力强、抗污能力强、结构牢固、安装简单使用方便等特点[7-8],其通电后,一旦有磁场靠近就能检测到信号变化。测量在特定时间间隔内的脉冲信号即可测得车轮转速。该类传感器由两部分组成:螺母固定件和检测物体(磁性磁铁)。为了便于车轮转速传感器的安装与调试,设计了支撑车轮转速传感器的梯形架。梯形架中开有宽度为螺母固定件直径大小的横向槽,以方便安装车轮转速传感器的螺母固定件部分,使其可以横向运动以对准刹车盘上的信号磁铁;在刹车盘内圆环周围钻有与磁铁直径相同的槽,用来固定贴紧检测物体磁铁。为了提高植保机车轮转速的测量精度,对刹车盘内圆环环边固定磁铁的槽进行了精确设计,增加固定磁铁槽的个数,在单位时间内提高检测到脉冲的频率,以此来提高植保机车轮转速测量精度。
植保机的四个车轮内侧都固定装有刹车盘,刹车盘内侧装有信号磁铁,通过支架将轮速传感器对准刹车盘内侧磁铁处以检测信号,再通过STC89C52RC单片机采集单位时间内脉冲信号的个数,最后利用无线串口将采集到的脉冲信号发送至接收终端,计算得出植保机车轮转速
式中:p为磁盘磁极数;t为脉冲频率宽度。
植保机车轮速度
V轮=N·π·d
式中,d为植保机车轮直径。
1.2 植保机行进速度的测量方法及原理
采用多普勒低速雷达对植保机行进速度进行测量。该方法测速灵敏度高,可精确测量运动物体的线速度,完全满足植保机车速实时、准确测量的要求,而且具有较高的系统稳定性与可靠性。该测速雷达就是利用多普勒效应来测量行进的植保机相对于地面的速度雷达。当波源和接受物体间存在径向相对移动时,接受波的频率将会发生变化:波源移向接受物时,接受波频率变高;波源背离接受物时,接受频率变低。发射波与接受波频率差就是物体运动的多普勒频移[9-10]。通过这个频率差异可以计算出植保机的行进速度。采用低速雷达传感器测量植保机的平移速度,当植保机向低速雷达运动时,根据多普勒效应,车辆的接受频率f0会随着车速的变化而变化,即:
式中:f1为低速雷达发射的电磁波频率;c为光速;v为植保机运行速度。同理,反射波的频率f2也会发生改变:
可以得出发射频率与接受频率的关系为:
因此,植保机多普勒频移
最后可以得到车辆运行的速度,计算公式为:
当然,这是比较理想的状态,低速雷达的方向与植保机行进的方向始终保持一致,这在实际测量中是无法操作的。一般情况下,在测量时低速雷达与地面成35°夹角[11-12]。因此,植保机行进车速
滑转率
式中,v轮为植保机车轮轮速;v为低速雷达传感器测得的车速。
2 试验设计与测试
2.1 测试条件
本试验选用的是山东众和多功能自走式喷杆喷雾机。试验测试装置通过支架安装在三脚架上,由于是裸机进行测试,本次实验植保机采用的是四轮驱动,选用该植保机分别对其低速挡位行驶、中速挡位行驶、高速挡位行驶时滑转率进行测试。本次试验于2019年7月1日在洪湖市进行(图1)。该试验田为普通水田,本次实验分别在不同的水层深度、不同的泥脚深度展开。
2.2 传感器及低速雷达的安装
实验分别需要对植保机四个车轮进行转速测量,因此安装了四个转速传感器及磁盘。其安装如图2所示。

图 1 田间试验

图 2 传感器的安装
由于雷达在测量速度的过程中需要固定在某一位置,故将低速雷达固定安装在植保机底盘,且与地面成35°夹角。
2.3 测试系统组成
STC89C52RC芯片通过霍尔传感器采集4个车轮的转速,将植保机车轮转速传输给LCD进行动态显示并进行保存。
低速雷达对植保机车身行进速度进行测量,测量到的车身速度数值通过RS232串口送出,输入到PC端并且保存。
最后将所测量到植保机在水田行驶时,4个车轮的转速及车速数据进行同步计算、显示及保存。
3 结果与分析
植保机不同挡位下滑转率的测量结果如图2所示。植保机在水田软泥路面分别以低速、中速、高速行走时,其左前、右前、左后、右后车轮的滑转率如图3所示。

(a)低档速行驶
由表1可知:植保机在水田软泥路面行走时,速度越快其滑转率越低。在低速挡位时,植保机前轮的滑转率在23.73%~29.15%之间变化,平均滑转率为26.01%,植保机后轮的滑转率在18.06%~26.58%之间变化,平均滑转率为23.33%;在高速挡位时,植保机前轮的滑转率在17.08%~22.41%之间变化,平均滑转率为19.39%,植保机后轮的滑转率在14.48%~20.21%之间变化,平均滑转率为17.96%。这是因为植保机处于低速挡位时,其速度慢但是其转矩很大,极其容易发生车轮空转现象,造成打滑,此时应该加快速度或者增大负载。
由表1可知,在一定条件下,植保机后轮的滑转率总是低于前轮的滑转率。本次试验中,植保机在泥脚深度较大的田间行驶,加装在车身后面的设备使得车身后轮的负重要大于前轮,且后轮跟地面接触更加紧实,因而植保机后轮的摩擦力相对于前轮更大一些,所以植保机后车轮更不易发生打滑现象。
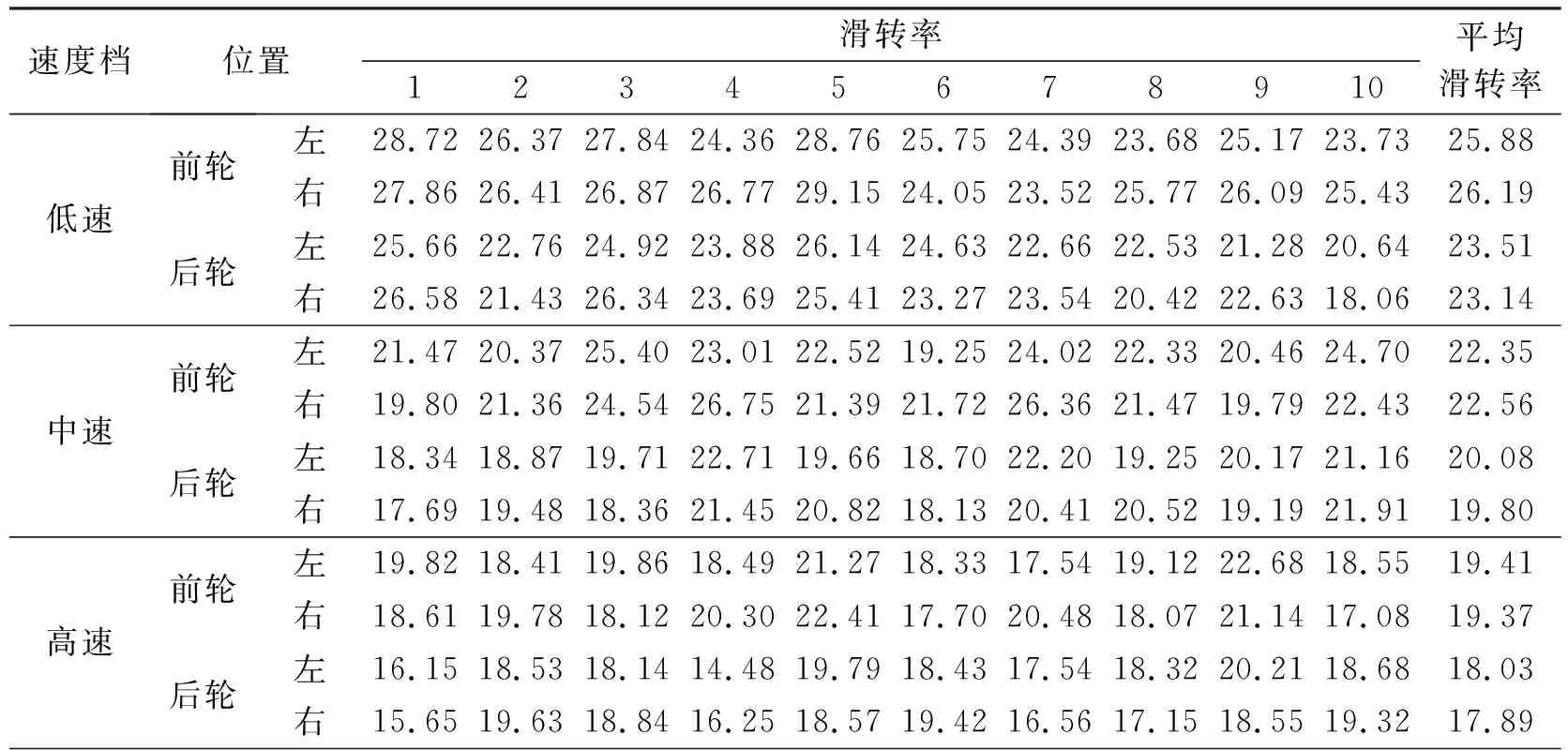
表1 植保机低中高速行进时的滑转率数据 %
4 结束语
本文采取了霍尔传感器测量植保机在水田工作时车轮的转速、低速雷达测量其车身行进速度的方法,研制了一种植保机四轮滑转率的测量,得出了植保机在工作时每个车轮精确的滑转率,当滑转率超过一定范围时,即出现打滑。所以,结合植保机4个车轮的滑转率,可以得出植保机在工作时的打滑情况,如单轮打滑还是多轮打滑等,为后续植保机动力分配系统打下了基础。