永磁同步电机非奇异终端滑模控制器的设计
2021-02-22康尔良贺建智王一琛
康尔良, 贺建智, 王一琛
(哈尔滨理工大学 黑龙江省高校直驱系统工程技术创新中心,哈尔滨 150080)
0 引 言
永磁同步电机(permanent magnet synchronous motor, PMSM)因具有功率密度高、体积小等诸多优点。在工业驱动控制系统中得到了广泛应用。比例积分控制(PI)作为传统的PMSM的调速方式,以理论简单、易于实现等优势在电机驱动调速场合得到了大量应用,但是永磁同步电机是一个非线性的系统,且电机控制系统的性能容易受到电机参数摄动和外部负载变化的影响。传统的PI线性控制具有局限性,无法适用于高性能控制系统。
在硬件的工艺发展已经到达瓶颈的背景下,多国学者先后提出了多种先进控制理论。如Back-Stepping控制[1]、模型预测控制[2]、智能控制[3]等。滑模控制(sliding mode control,SMC)因其具有结构简单、鲁棒性强、响应速度快、对系统参数变化不敏感等优点开始逐渐在航空航天、无人机、机器人等实际工程中逐渐得到应用[4-6]。
传统滑模的控制通常会采用线性滑模面使系统误差渐进收敛到平衡状态,收敛速度与滑模面的参数选择有关。但是不论参数如何选取,系统误差只会无限的趋近于平衡状态,无法使误差在有限时间内收敛到平衡状态。有前人提出终端滑模控制的思想,利用非线性函数构建滑模面,从而使误差在有限时间内收敛。但是,如果滑模面参数选取不当,会导致系统出现“奇异”现象[7],严重影响系统的性能。为了避免此问题,又有前人提出非奇异快速终端滑模控制(non-singular fast terminal sliding mode control,NFTSMC)的思想,通过选取合适的非线性滑模面可以实现在不同阶段收敛速度都能达到最佳,保证了收敛速度的全局快速性[8-10]。
当系统轨迹到达切换面并在切换面附近作高频切换运动时,系统会不可避免的出现抖振现象,严重影响了电机控制系统的性能,所以如何抑制抖振对系统的影响,成为了研究的主要方向,文献[11]将智能控制与滑模控制结合构建控制器,将滑模面推广到分数阶,根据当前系统状态,利用模糊控制的特性实现开关增益的调节,从而使系统的抖振得到削弱。但是如果分数阶的参数选取不当会出现奇异现象。文献[12]提出一种使用趋近角互补滑模控制控制策略,通过结合积分滑模面与互补滑模面,并采用饱和函数的方法,同样使系统的抖振得到改善。文献[13]实现了一种边界层可调的滑模控制器,在滑动模态阶段切换至小边界层,结果表明此方法在保证精度的前提下有效削弱了系统的抖振。文献[14]提出了一种新的指数趋近律,既可以提高趋近速度又可以有效抑制滑模的抖振现象。通过使用饱和函数与边界层的方法取代传统的开关项可以削弱传统SMC控制存在的固有抖振。
部分学者发现抖振产生的来源主要是来自于外界干扰和不确定项,而抑制扰动往往采用较大的开关增益,较大的开关增益引起了系统的抖振。有前人提出利用扰动观测器(disturbance observer, DOB)的方法。利用观测器对系统施加的负载转矩进行估计,并将估计结果前馈补偿到速度控制器里,避免了使用较大的开关增益,有效抑制了抖振的产生[15-17]。文献[18]提出了一种角速度跟踪控制的方法,在线观测系统的不确定性扰动,并用鲁棒反步控制器抵消,使电机系统在抗干扰方面有着较为良好的性能。文献[19-20]针对负载变化导致系统转动惯量不同的问题,设计一种能够在线识别系统扰动惯量和摩擦系数的新型扰动观测器,结果表明此方法同样能增加系统的抗扰能力。但是实际应用中电机系统中存在大量干扰信号,会导致辨识算法出现误差,导致了应用的局限性。
本文利用非奇异快速终端滑模设计速度控制器,能够使系统误差快速收敛,针对电机转速产生的抖振,同样使用非奇异快速终端滑模的思想设计了扰动观测器,能够快速的估计系统施加的负载转矩,并将估计结果前馈补偿到速度控制器中,避免使用较大的开关增益,从而使电机转速抖振得到削弱,提高电机调速控制系统的抗扰性。
1 PMSM数学模型
为了控制器的设计过程清晰简洁且不失一般性,选取表贴式PMSM作为研究对象,并假设电机运行时符合以下条件:
1)电机中的绕组互相对称,且相差120度;
2)不计电机的磁滞和涡流损耗;
3)假设转子上没有阻尼扰动。
基于以上假设,PMSM在d-q轴坐标系下的电压方程可以表示为:
(1)
PMSM的电磁转矩方程为
(2)
式中:ud和uq、id和iq分别为d-q轴电压与电流;R为定子电阻;Ld和Lq分别为d-q轴电感;ωe为电机的电角速度;φf为永磁体产生的磁链;pn为磁极对数。
PMSM的动力方程为
(3)
式中:J为PMSM的转动惯量;B为摩擦系数;ωm为机械角速度。
在电机调速控制系统中,通常把外界施加的负载转矩TL视为扰动。则上式可变为
(4)
2 速度控制器的设计原理与稳定性分析
2.1 速度控制器的设计
定义电机参考转速为ωref,实际转速为ωm。则速度误差与误差变化率分别为:
e=ωref-ωm;
(5)
(6)
构建如下非奇异快速终端滑模面:
(7)
式中β>0,γ>0,p、q为正奇数,且1
1。
当s=0时,可知速度误差变化率为
(8)
(9)
再结合式(4)、式(5)和式(6)可以得出速度控制器的表达式为
(10)
由于外部的负载扰动是一个未知量,需要设计扰动观测器将所估计值反馈到速度控制器中,增加系统的鲁棒性。
2.2 速度控制器的稳定性证明
根据李亚普诺夫第二稳定性理论,构建归一化李亚普诺夫函数为
(11)
对上式进行求导可得

(12)
由式(9)可知:
(13)
iq由式(10)可知,则
(14)
则
(15)
因为1
0,所以有
(16)
根据李亚普诺夫第二稳定性理论:
若存在一个具有连续偏导数的函数V(t),满足以下条件:
1)V(t)是正定的;

经过以上证明,表明所设计的速度控制器满足稳定性理论。证明速度控制器能够使系统误差快速收敛。
3 扰动观测器设计及稳定性分析
3.1 扰动观测器的设计
由前文可以得知,控制系统里存在扰动项,为了减少负载扰动对控制系统性能的影响,需要利用扰动观测器估计所施加的负载扰动,然后前馈补偿到速度控制器中,使系统的动态性能得到提高。
在一个控制周期内,负载转矩是一个变化较慢的信号,所以负载转矩的一阶导数为0,有
(17)
即
(18)
以电机机械角速度ωm和系统负载扰动d(t)构建状态空间方程为
(19)
将机械角速度和系统负载扰动d(t)作为观测对象,构建非奇异终端滑模观测器方程为
(20)
其中:l为观测器增益;f(eω)为观测误差的滑模控制律。
由以上二式得出误差方程为
(21)
其中:eω为速度观测误差;ed为扰动观测误差。
对于扰动观测器同样选取非奇异终端滑模面,即
(22)
(23)
3.2 扰动观测器的稳定性证明
根据式(11)、式(12)可得
(24)
则
(25)
由上式可知,所设计的扰动观测器满足李亚普诺夫第二稳定性理论。可以使观测误差在有限时间收敛。
4 仿真与实验结果与分析
4.1 仿真结果与分析
实验电机型号为XK-130AEA26025,主要参数如表1所示。

表1 仿真模型的参数
永磁同步电机调速系统的结构框图如图1所示,电机调速系统的速度控制器采用NFTSMC控制,电流环采用传统的PI线性控制,扰动观测器的输入为q轴电流和转速,输出为扰动观测值,然后前馈补偿到非奇异终端滑模速度控制器的输出端。
为了验证设计的扰动观测器的有效性,将传统SMC控制和PI控制与NFTSMC+DOB一起作比较,为了保证仿真实验的准确性,电流环采用PI控制。PI速度控制器的参数的比例系数kp=0.228,积分系数ki=40.5,电流环参数均为kp=400,ki=31 943;NFTSMC+DOB的参数为:m=65/61;p=15;q=11;γ=0.006 5;β=4 762;η=3×106;k=800。
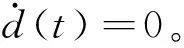
采用不同控制策略的电机空载启动时仿真结果如图2所示,参考转速设置为1 000 r/min,采用 NFTSMC+DOB控制的方案在电机启动后约0.022 s上升到参考转速,而采用SMC控制上升到参考转速时间稍慢,使用PI控制则出现了10.4%的超调量。通过SMC控制与NFTSMC+DOB的方法对比可以得出:采用NFTSMC+DOB的方法响应迅速、上升到参考转速的时间更快且无超调量。

图1 电机调速控制系统框图Fig.1 Block diagram of motor speed control system
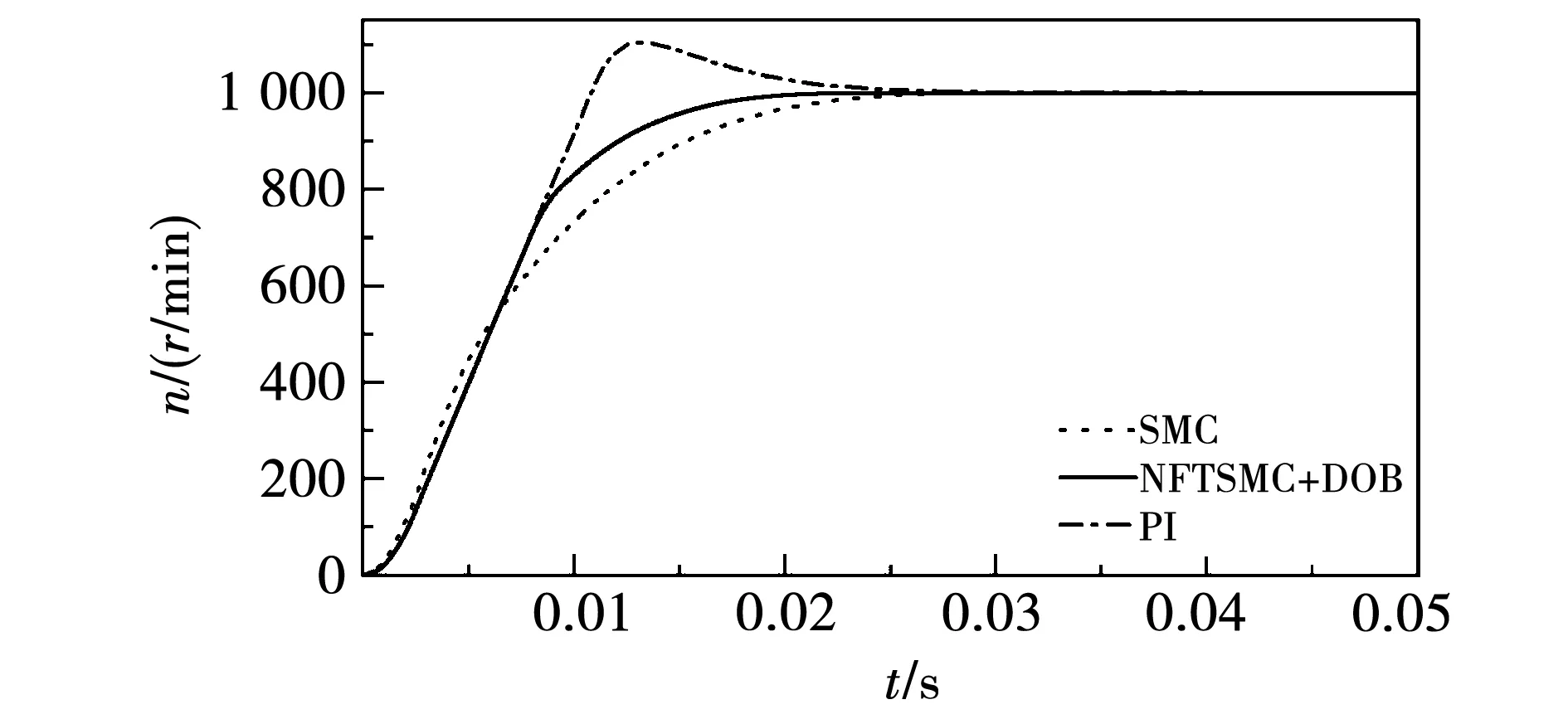
图2 启动时速度响应曲线Fig.2 Speed response curve at startup
4.2 实验结果与分析
PMSM调速实验根据图3搭建,控制核心采用TMS320F28335芯片,通过PC将程序烧录到DSP里,然后使用磁粉制动器对电机进行施加负载,可通过直流可调电源控制磁粉制动器实现对电机施加不同的负载。最后通过示波器观测实验结果。

图3 实验台装置Fig.3 Test bench device

图4 施加负载时转矩观测波形图Fig.4 Torque observation waveform when load is applied
电机在1 000 r/min平稳运行时对其突加转矩,其转速表现如图5所示。
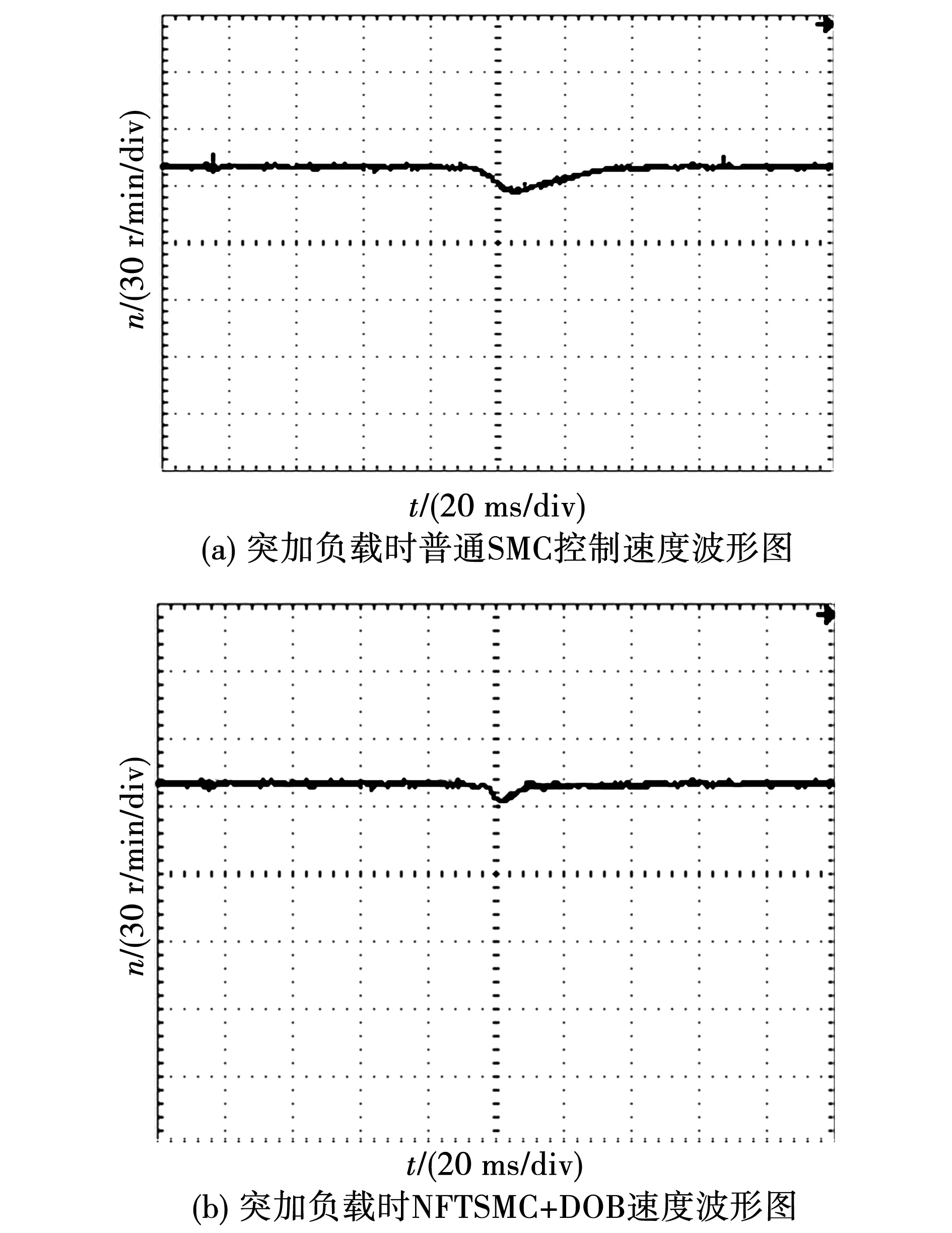
图5 突加负载时不同控制策略的转速波形Fig.5 Speed waveforms of different control strategies when sudden load is applied
采用普通SMC控制时转速存在20 r/min左右的变化,并恢复到参考转速时间较长。采用本文提出的NFTSMC+DOB控制策略时,由于扰动观测器的存在,转速变化较小,变化大约只有5 r/min,且恢复到参考转速时间较短,说明提出的控制策略抗扰性较好。
当电机平稳运行时,对电机非奇异终端滑模速度控制器输出iq波形进行观测,由图6可知,采用普通SMC控制策略,速度控制器输出波形波动较大,而采用新型控制策略的速度控制器输出波形波动较小,抗扰性较强。

图6 采用不同控制策略的q轴电流波形Fig.6 q-axis current waveform with different control strategies
5 结 论
本文通过采用非奇异快速终端滑模与扰动观测器二者相结合的策略,使速度控制器的性能得到提升,有效降低了扰动对系统的影响。通过仿真与实验结果表明,使用NFTSMC+DOB速度控制器可以使转速快速上升到参考转速且无超调量,当外部对系统施加负载转矩时,速度变化超调量更小,恢复时间更快,本文所设计的扰动观测器可以准确、快速的对外部施加的转矩值进行估计。使调速系统性能更加优良,抗负载扰动能力得到增强。在施加扰动后,电机平稳运行时,与传统SMC控制相比,q轴电流输出波动较小。验证了本文提出的NFTSMC+DOB方法能够提高系统的鲁棒性。