四自由度混联天线机构静力学及运动特性仿真与设计
2021-02-01张国兴郭金伟侯雨雷曾达幸
张国兴 郭金伟 侯雨雷 曾达幸
(1.燕山大学机械工程学院, 秦皇岛 066004; 2.东莞理工学院机械工程学院, 东莞 523000)
0 引言
天线是航天探测、导航预警和军事侦查等领域中数据信息交互的重要设备[1]。并联天线机构因能够带动反射面实现连续转动而在天线领域得到关注[2]。国内外研究人员已将Stewart并联机构应用于大型天线系统调姿领域[3-6]。少自由度并联机构能够满足运动需求,且制造成本低,在天线领域具有应用潜力[7]。文献[8-9]对车载并联天线机构进行了动力学仿真。文献[10]对四自由度混联式天线机构进行了力学仿真分析。文献[11]设计了一种高收拢率四面体折展机械臂,进行了运动学和模态分析,并研制了样机。文献[12]基于四面体单元设计了桁架式可展开天线机构。文献[13-14]基于模块化思想设计了多种桁架式天线机构,并进行了性能分析和对比。文献[15-16]提出了一种双层环形天线机构,并进行了机构运动学和动力学分析。
在机构学领域,研究人员进行了诸多研究。赵永生等[17]提出了适用于过约束并联机构的受力分析方法。沈惠平等[18]研究了低耦合度部分解耦的3T1R并联机构,分析了机构的工作空间。畅博彦等[19]对具有整周回转能力的3T1R机构进行了运动学分析,得到机构工作空间。叶伟等[20]对一种2R2T并联机构进行了运动学分析,得到机构工作空间和性能图谱。SUN等[21]分析了一种5-DOF摩擦搅拌焊混联机构的刚度性能。LI等[22]基于几何代数方法对过约束并联机构的刚度建模问题进行了研究。CAO等[23]在考虑各杆件重力和外力的情况下,对过约束并联机构进行研究。GUO等[24]提出一种适用于航空零件加工的新型5-DOF并联机构。YANG等[25]通过增加变形协调方程,研究了两种过约束并联机构的刚度模型。
随着天线反射面口径的逐渐增大,确保天线高精度可靠运行愈发重要。目前,天线机构多采用串联式或并联式机构,应用于天线领域的混联天线机构研究并不多,设计承载力强和运动性能优越的混联天线机构具有重要实用价值。本文以四自由度混联天线机构为研究对象,在承载性能方面,进行混联天线机构的静力学分析和天线机构有限元和振动特性仿真;在运动性能方面,通过运动姿态仿真得到机构运动包络图;最后,基于设计的关键零部件模型设计天线机构样机。
1 构型描述
如图1所示,四自由度混联天线机构包括天线反射面C、极化转动机构T和3-R(RRR)R并联机构。该四自由度混联机构中3-R(RRR)R并联部分的动平台和定平台均为等边三角形;支链部分包含3个轴线相交的转动副以及与定/动平台连接的2个转动副。极化转动机构采用电机驱动齿轮和转盘轴承实现反射面绕自身轴线转动。在定/动平台外接圆圆心分别建立参考坐标系OOxOyOz和动坐标系CCxCyCz,在反射面的相位中心点建立末端坐标系TTxTyTz,参考坐标系Ox轴方向与OP1一致,Oz轴垂直于定平台且向上为正;动坐标系Cx轴方向与CQ1一致,Cz轴垂直于动平台且向上为正;Tz轴与动坐标系Cz轴重合,Tx轴初始方向与动坐标系Cx轴相同。在混联天线机构各个关节转动副建立关节局部坐标系,其中各个关节局部坐标系的z轴均沿转动副轴线方向。
由图1可知,3-R(RRR)R并联机构部分具有两转一移3个自由度,2个转动自由度能够实现天线反射面的方位和俯仰运动,1个移动自由度能够实现天线反射面的竖直方向收拢运动。天线反射面与动平台之间设有单自由度转动副,称为极化转动机构,其作用是带动天线反射面绕自身轴线转动。因此,混联天线机构能够实现方位、俯仰、收拢运动和极化转动。
2 力学分析
(1)
选取与定平台连接的转动副Pi(i=1,2,3)和极化机构转动副Q4作为驱动,如图1所示关节局部坐标系z轴均为驱动所在轴线。因此,各个驱动的单位驱动力旋量可以表示为
(2)
首先建立混联天线机构反射面静力学平衡方程。反射面与混联天线机构动平台通过极化转动装置连接。天线反射面受力情况如图2所示。
如图2所示,天线反射面受到极化转动机构提供的3个约束力F4x、F4y、F4z和2个约束力偶M4x、M4y,极化转动机构驱动装置提供一个沿z轴方向的驱动力矩,同时天线反射面受到重力作用。根据力旋量变换关系,将天线反射面关节局部坐标系下表示的约束旋量系矩阵转换为参考坐标下表示的约束旋量系矩阵。同理可将天线反射面关节局部坐标系下表示的驱动力旋量系矩阵转换为参考坐标下表示的驱动力旋量系矩阵,可得
(3)
O4——转动副Q4局部坐标系位置向量的反对称矩阵
将作用于天线反射面的单位约束力矩阵和驱动力矩阵迁移到基坐标系,表示为
(4)
O——动坐标系位置向量反对称矩阵
在参考坐标系下,可将天线反射面受到的约束力旋量、驱动力旋量和重力旋量进行线性叠加,得到
(5)
式中IF——天线反射面空间惯量
g——重力加速度旋量
O——零向量
混联天线机构动平台与3条支链和天线反射面均通过转动副连接。动平台受力情况如图3所示。
如图3所示,根据牛顿第三定律,在极化转动机构与天线反射面连接处受到天线反射面提供的3个约束反力F′4x、F′4y、F′4z和2个约束反力偶M′4x、M′4y,同时受到极化转动机构驱动器提供的一个反力偶M′4。在极化转动机构与3个分支连接处分别受到各个分支提供的3个约束力FQix、FQiy、FQiz和2个约束力偶MQix、MQiy。同时极化转动机构还受到自身重力作用。
根据力旋量变换关系,将作用于极化转动机构的关节局部坐标系下表示的单位关节约束旋量系矩阵转换为参考坐标下表示的单位关节约束旋量系矩阵,得到
(6)
Oi——转动副Qmi局部坐标系位置向量的反对称矩阵
将作用于极化转动机构的3个分支的单位约束力矩阵迁移到基坐标系下,表示为
(7)
式中Oi——极化转动机构位置向量的反对称矩阵
在参考坐标系下,可将极化转动机构受到3个分支的约束力、极化转动机构驱动反力、天线反射面约束反力和极化转动机构自身重力进行线性叠加,得到

(8)
式中IC——动平台空间惯量
《一个热爱艺术的修士的内心倾诉(Herzensergießungen eineskunstliebenden Klosterbruders)》在这本书刚刚出版的那个年代是一个令人感到陌生甚至怪癖的标题。修道院(Kloster)和内心倾诉(Herzensergießungen)两个词语带有明显的宗教色彩。事实上,瓦肯罗德的确将艺术提升到了与宗教并列的高度,在他看来,世上有两种最崇高的语言——自然和艺术。自然是上帝的语言,而艺术则是受上帝青睐的人的语言。音乐和造型艺术都是以有限的形式来表达无限的方式。
混联天线机构包括3个分支,每个分支包括4个杆件,每个杆件之间均通过转动副连接,每个杆件的受力情况如图4所示。
如图4所示,杆件KiQi两端分别受到3组约束反力FKix和F′Qix、FKiy和F′Qiy、FKiz和F′Qiz以及2个约束反力偶MKix和M′Qix、MKiy和M′Qiy;杆件GiKi两端分别受到3组约束反力FGix和F′Kix、FGiy和F′Kiy、FGiz和F′Kiz以及两组约束反力偶MGix和M′Kix、MGiy和M′Kiy;杆件JiGi两端分别受到3组约束反力FJix和F′Gix、FJiy和F′Giy、FJiz和F′Giz以及2组约束反力偶MJix和M′Gix、MJiy和M′Giy;杆件PiJi两端分别受到3组约束反力FPix和F′Jix、FPiy和F′Jiy、FPiz和F′Jiz以及2组约束反力偶MPix和M′Jix、MPiy和M′Jiy。杆件KiQi、GiKi、JiGi和PiJi还受到杆件自身重力Gij(j=1,2,3,4)的作用,在杆件PiJi的Pi端受到驱动器提供的驱动力矩Mmi。
根据力旋量变换关系,将作用于3个分支的关节局部坐标系下表示的关节约束旋量系矩阵转变为参考坐标下表示的关节约束旋量系矩阵,得到

(9)
Oi——转动副Kmi局部坐标系位置向量的反对称矩阵转动副Gmi局部坐标系的旋转矩阵
Oi——转动副Gmi局部坐标系位置向量的反对称矩阵转动副Jmi局部坐标系的旋转矩阵
Oi——转动副Jmi局部坐标系位置向量的反对称矩阵转动副Pmi局部坐标系的旋转矩阵
同理,将作用于杆件PiJi的关节局部坐标系下表示的驱动力旋量矩阵转换为参考坐标下表示的驱动力旋量系矩阵,得到
(10)
将作用于3个分支的单位约束力矩阵迁移到基坐标系下,表示为

(11)
将作用于杆件PiJi的单位驱动力矩阵迁移到基坐标系下,表示为
MG_PiJi=E6×6OMG_PiJi(i=1,2,3)
(12)
在参考坐标系下,可将杆件KiQi、GiKi、JiGi和PiJi受到的约束力和约束力偶,杆件自身重力和驱动器的驱动力矩进行线性叠加,得到
(13)
式中IKiQi——杆件KiQi的空间惯量
IGiKi——杆件GiKi的空间惯量
IJiGi——杆件JiGi的空间惯量
IPiJi——杆件PiJi的空间惯量
如图5所示,混联天线机构定平台受到分支PiJi提供的3个约束反力F′Pix、F′Piy、F′Piz和2个约束反力偶M′Pix、M′Piy以及自身重力的作用,还受到连接点Pi处驱动器提供的驱动反力矩。
在参考坐标系下,可将定平台受到3个分支的约束反力F′Pix、F′Piy、F′Piz和约束反力偶M′Pix、M′Piy,驱动反力偶M′mi以及定平台自身重力进行线性叠加,得到
(14)
联立混联天线机构各个部件的力平衡方程,混联天线机构全部杆件的力平衡方程可以表示为
Cη+I=O
(15)
式中I——混联天线机构全部杆件的广义空间惯性矩阵
η——混联天线机构的驱动力矩阵
根据式(15)可以得到各个关节约束力和驱动器提供的驱动力矩阵为
η=-C-1I
(16)
其中
式中τj——各关节的约束力矩阵
τm——各个驱动器的驱动力矩阵
通过求得τj和τm即可获得混联天线机构各个部件受到的约束力和驱动关节处的驱动力。
根据天线机构任务需求将工作空间设定为:俯仰角为0°~90°;方位角运动范围为0°~360°。得到天线机构驱动关节力矩随位形分布情况如图6所示。
图6给出了理想条件下天线机构驱动各关节力矩随俯仰和方位角变化情况,各关节力矩最大值为323.86 N·m,驱动力矩的求解结果为伺服电机选型和机构样机研制提供参考。
表1给出了混联天线机构方位角为0°,俯仰角分别为45°和90°两组位姿各驱动关节力矩理论值、仿真值及相对误差,其中理论值为图6中对应位姿的数值计算结果,仿真值为有限元软件仿真结果。
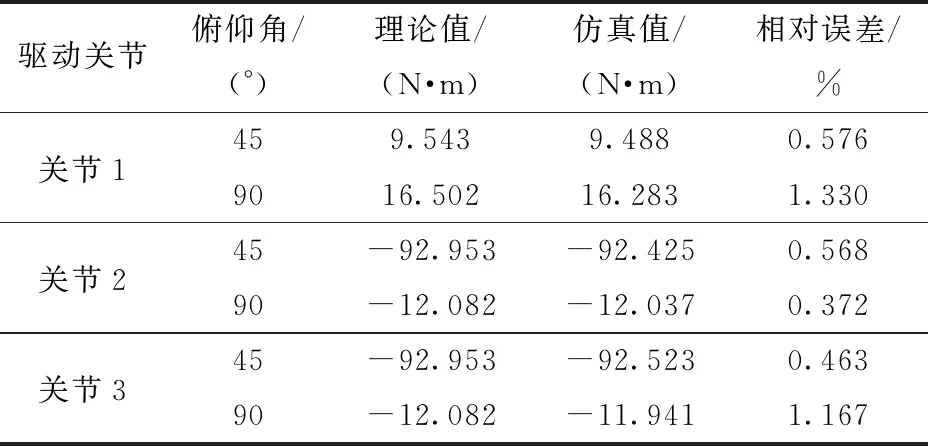
表1 两组位姿下驱动关节力矩的对比Tab.1 Comparison of static analysis results
由表1可知,静力学理论求解结果与仿真分析结果之间的相对误差不大于1.330%,验证了静力学分析结果的正确性。
3 仿真分析
3.1 静力学仿真
将三维模型导入ANSYS/Workbench,设定模型材料弹性模量为6.96 Pa,泊松比为0.31,屈服强度为6.85×108Pa,重力加速度设为9.8 m/s2。天线机构俯仰角为45°、90°时有限元分析结果如图7所示。
由图7可知,当天线俯仰角为45°、90°时,天线最大变形分别为0.574 04、0.673 95 mm,最大变形均发生在反射面边沿,最大变形约占运动半径的0.11%和0.13%,俯仰角为45°、90°时混联天线机构满足设计要求。
3.2 振动分析
借助有限元分析软件得到天线机构俯仰角为45°和90°的前6阶固有频率,如表2所示。俯仰角为45°的天线机构振型云图如图8所示。
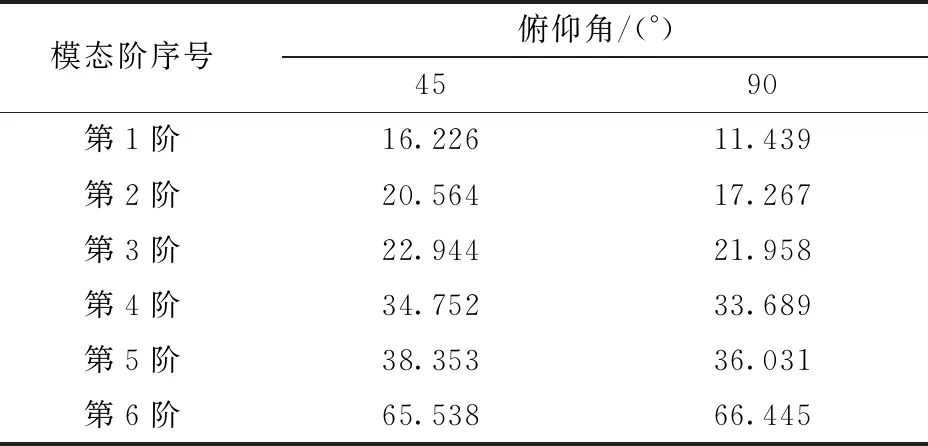
表2 机构前6阶模态固有频率
由表2可知,天线机构前6阶固有频率分布在11.439~65.538 Hz,随着俯仰角的增加,前5阶固有频率均减小。由前6阶振型可以看出,天线机构分支连杆变形较大,容易产生较大交变应力,导致疲劳裂纹和断裂现象,连杆部位是混联天线机构的相对薄弱环节,可通过增加连杆半径等方式提升连杆刚度。设计环节需要使激励频率尽量远离系统固有频率,以避免发生共振现象。
3.3 包络空间分析
天线卫星追踪运动过程中应避免与周围物体发生干涉,故需评估整个天线机构的运动范围,即运动包络空间。参考天线机构工作任务需求,设定混联天线机构俯仰运动时:方位角为0°,俯仰角0°~90°;方位运动时:方位角为0°~360°,俯仰角45°。采用Matlab软件对机构进行运动特性仿真,图9~11分别为混联天线机构运动线框图、俯仰运动包络空间和方位运动包络空间。
图9为混联天线机构初始位姿、俯仰90°运动状态和方位360°运动状态。运动特性仿真结果表明该混联天线机构满足天线轨迹跟踪的性能要求。
图10、11分别给出了混联天线机构俯仰运动和方位运动的运动包络空间三维视图、俯视图和左视图。由图10、11得到混联天线机构整机运动范围如表3所示。
由表3可知,混联天线机构俯仰和方位运动过程中,x轴方向运动范围为-1 045~1 045 mm,y轴方向运动范围为-1 045~1 045 mm,z轴方向运动范围为-508~1 445 mm。通过对混联天线机构运动包络空间分析,获得机构俯仰和方位运动范围,为天线机构安装和运行保障提供参考。
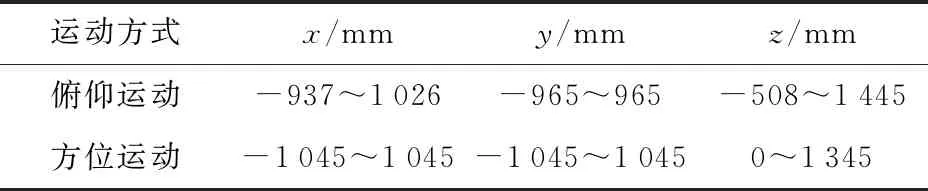
表3 天线机构包络空间范围Tab.3 Envelope space range of antenna mechanism
4 样机设计
根据1.8 m口径天线座架结构和运动设计需求,开展混联天线机构三维模型绘制和物理样机设计。混联天线机构各条支链需要带动天线运动,同时对极化转动机构及天线反射面起支撑作用。图12给出了混联天线机构传动支链结构图。极化转动机构作用是带动天线反射面绕自身轴线转动,图13给出了极化转动机构结构图。
图12为上/下支链包含上/下支链1和上/下支链2,通过转动轴承组成转动副。如图13所示,极化转动机构包含驱动电机、转盘轴承和小齿轮,驱动电机带动小齿轮带动转盘轴承转动,进而驱动反射面实现绕法向轴线的极化转动。基于混联天线机构样机静力学及仿真和关键部件设计,开展机构部件的选型、加工和装配。1.8 m口径混联天线机构1∶1等比例物理样机如图14所示。
5 结论
(1)以3-R(RRR)R并联机构为基础构建3-R(RRR)R+R四自由度混联天线机构,该混联天线机构能够适应反射面俯仰运动、方位运动以及天线反射面绕轴线转动的需求。混联天线机构满足天线运动功能要求。
(2)基于螺旋理论对混联天线机构进行静力学分析,获得了俯仰角范围为0°~90°、方位角范围为0°~360°时的驱动关节力矩值,运用有限元软件得到了机构俯仰角为45°和90°时的整体变形,获得俯仰角为45°和90°时机构的固有频率。
(3)进行了混联天线机构的运动仿真,获得了俯仰角范围为0°~90°和方位角范围为0°~360°的运动包络空间图。对混联天线机构关键零部件进行结构设计,设计了四自由度混联天线机构物理样机。
