基于旋量理论的并联机构过约束分析步骤的改进
2020-03-12汪建晓
汪建晓
(佛山科学技术学院机电工程学院,广东佛山528225)
并联机构是由基座、动平台以及联接它们的若干分支所组成的多闭环机构,具有刚度大、精度高以及动态响应快等特点,因而在运动模拟、取放作业、组装以及多轴加工等许多场合得到广泛应用。
在进行并联机构的分析与综合时计算其自由度是最基本内容之一。当采用传统的机构自由度计算公式即Grübler-Kutzbach(G-K)公式对并联机构进行分析时,常会由于机构的特殊几何形状而不能得到正确解,特别是对于一类所谓过约束并联机构。其原因在于G-K公式将所有约束都当成有效约束,即使那些不影响机构自由度的冗余约束(或虚约束)也不例外。
旋量是具有旋距要素的线矢量(也称为螺旋)。旋量可以表示运动学中的一般刚体运动或者静力学中的广义力(包括力和力偶)。旋量理论可以追溯到18世纪的Mozzi瞬时运动轴及19世纪初叶的Poinsot合力中心轴与Chasles位移轴。至1876年,Ball完成了对这一理论的系统研究,并体现在其1900年的著作当中。
并联机构的运动和约束情况较为复杂,因而最适宜采用旋量理论进行描述。20世纪80年代以来陆续有学者开始用旋量来表达Stewart平台和6-6R并联机构等的分支运动,用旋量理论研究少自由度并联机构的型综合,以及用互易旋量研究一些并联机构自由度的计算方法。
戴建生、黄真等人[1-2]系统研究了并联机构的一系列旋量系,创建了并联机构旋量系分析的理论体系,揭示了这些旋量系与机构运动和约束之间的内在联系,并提出了一种修正的G-K公式,为并联机构的自由度和过约束分析计算奠定了理论基础,引起国际上机构学界的广泛关注[3-5]。近十余年来这一理论体系得到丰富和完善[6],已逐步普及到相关专业研究生或高年级本科生教材中去了[7-8]。
文献[1-2]重点研究了各旋量系之间的关系,并用多个示例验证了修正的机构自由度计算方法的正确性,然而并未给出条理化的机构自由度与过约束(包含虚约束和公共约束)分析的步骤,这对于初学者掌握这一方法有些不便。文献[7-8]给出的机构自由度与过约束分析步骤除部分变量符号不同外,步骤的内容都是一致的,然而当笔者按这些步骤进行并联机构自由度计算时,却发现过约束的分析步骤中存在公式表达不准确、不完善的问题。
本文的目的在于针对上述问题,提出一种改进的机构过约束分析的步骤,以便于基于旋量理论的并联机构自由度计算方法的推广应用。
1 机构自由度计算的G-K公式及其修正
自1869年Chebychev提出第一个机构自由度计算公式至今的150年里,很多学者一直在找寻通用的机构自由度计算公式,提出的公式在40种以上[3,9]。其中,较为传统的、最具代表性的、应用也最为普遍的要属Grübler-Kutzbach公式[10-11],即

其中,F为机构的自由度数;d为机构的阶数,d=6-λ,λ为公共约束数;n为构件数(包含机架);g为运动副数;fi为第i个运动副的自由度数目。
不过,目前已证明,对于很多机构的自由度,利用该公式计算的结果都不正确,因此提出了许多修正公式。戴建生、黄真等人提出的修正的G-K公式为[1-2,6]

其中,ν为机构的冗余约束(或虚约束)数。
当考虑机构的局部自由度时,式(2)进一步修改为[12]

其中,ζ为机构的局部自由度数。
应用式(2)或(3)计算机构自由度的难点在于公共约束和虚约束的判定,而基于旋量理论的并联机构过约束分析方法能有效地解决这个难题。
2 基于旋量理论的并联机构自由度和过约束分析方法
如图1所示,并联机构中包含3个基本互易旋量系对,分别是:1)与单个从基座到动平台的分支(ii=1,2,…,p,其中p为分支数)对应的分支运动旋量系Sbi和分支约束旋量系。2)与动平台对应的平台运动旋量系Sf和平台约束旋量系Sr。3)与整个机构对应的机构运动旋量系Sm和机构约束旋量系Sc。此外,还有分支补约束旋量系和平台补约束旋量系等。
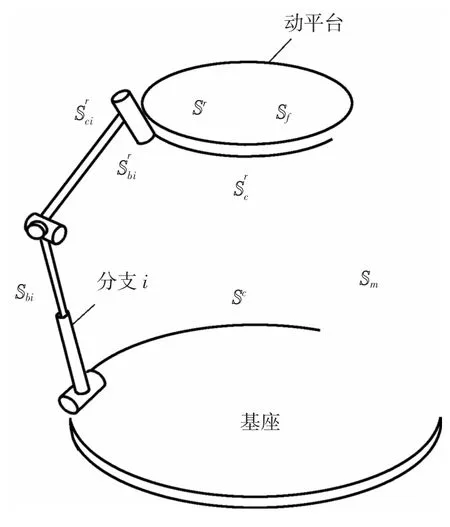
图1 并联机构中的几对基本旋量系
假定每个分支的旋量是线性独立的,则冗余自由度和奇异在每个分支中都被排除。这些旋量系的定义与相互关系详见文献[1-2,6-7]。为叙述方便,下文主要以文献[6-7]为代表进行阐述。
这里先给出基于旋量理论的通用自由度分析过程[7],这也是机构过约束分析的前序步骤,具体步骤如下。
(1)判断机构是否含有局部自由度,并计算出具体数值ζ。
(2)构造各个分支的运动旋量系Sbi。
(5)根据SfΔSr=0,计算得到动平台的运动旋量系Sf。
(6)观察Sf的特点,进一步确定机构的自由度分布情况。
(7)改变机构的位形,重复上述步骤,以验证所求得的自由度是否为全周自由度。如果前后自由度性质不变,则为全周自由度;否则为瞬时自由度。
需要指出的是,在文献[7]中旋量系和旋量系的矩阵表示采用相同的符号,例如分支运动旋量系和分支约束旋量系分别用Sbi和表示,而上述步骤3的矩阵方程为,这容易造成混淆。本文对其进行了区分,旋量系与旋量集的符号均用空心体表示,而旋量系的矩阵用对应字母的黑斜体表示。在上述矩阵方程中,为进行旋量系互易运算的矩阵,由3×3分块矩阵组成,E为单位矩阵。运,n为运动旋量系的阶数,各旋量均采用列阵表达。
本文着重讨论机构过约束的分析。文献[6]在论述各旋量系的定义与相关定理的基础上,给出了机构公共约束数λ和虚约束数ν的计算公式,分别为动旋量系的矩阵为,约束旋量系的矩阵为

其中,dim()表示旋量系的阶数,card(〈〉)表示旋量系多重集(旋量集)中元素的个数。
文献[7]给出的对机构进行过约束(包括公共约束和冗余约束)分析的步骤如下。
集合中的元素个数记作card(〈Sr〉)。
(2)根据Sm=Sb1∪Sb2∪…∪Sbp,求取整个机构的运动旋量系Sm。
(3)根据SmΔSc=0,求取整个机构的约束旋量系Sc。
(4)根据λ=dim(Sc),确定机构的公共约束数λ。
(5)根据d=6-λ,确定机构的阶数d。
3 过约束分析步骤存在的问题及改进
由上述可知,文献[7]给出的机构自由度和过约束分析的步骤较为清晰,容易实施,特别对于那些初学者来说就有了一个求解过程的指南。但是当利用该步骤进行机构过约束分析时,不难发现它存在以下两个问题。
(1)其步骤1求出的card(〈Sr〉)闲置,没有用于其他计算或分析。
对于第2个问题,文献[6]给出以下关系式

显然,根据这个条件去分解旋量集,重复元素只能存在于一个旋量集中,因而求解具有确定性。
对于第1个问题的解决就稍显复杂。经研究,发现在文献[6]中定义了表征机构公共约束数λ和虚约束数ν总体大小的一个参数,称为综合约束冗余因子。综合约束冗余因子c的计算公式为

综合约束冗余因子c也可以由card(〈Sr〉)与dim(Sr)表示为

由于前序步骤4已求出Sr,即dim(Sr)确定,因此可以用式(8)把上述步骤1求出的card(〈Sr〉)与dim(Sr)相减,求得综合约束冗余因子c,再与式(7)求出的同一参数进行比较,若两者相同,则验证了过约束分析的正确性。
针对这两个问题进行改进后,对机构进行过约束(包括公共约束和冗余约束)分析的步骤如下。
(2)根据Sm=Sb1∪Sb2∪…∪Sbp,求取整个机构的运动旋量系Sm。
(3)根据SmΔSc=0,求取整个机构的约束旋量系Sc。
(4)根据λ=dim(Sc),确定机构的公共约束数λ。
(5)根据d=6-λ,确定机构的阶数d。
(9)计算综合约束冗余因子c=(p-1)λ+ν,若与前面求出的c一致,则表示过约束分析正确。
与改进前的过约束分析步骤相比,可知改进后步骤1与7有修改,且增加了一个新的步骤9。
4 算例
为了便于对照,这里分别从文献[1]和[7]中找出其有代表性的1个算例,并对改进后的机构过约束分析步骤加以验证。
例1分析图2所示Sarrus机构[7]的自由度和过约束。图2中每个分支中转动副(R)的轴线相互平行,但两个分支的运动副轴线相互垂直。
解该机构可看成是由2个分支组成的单环机构,机构自由度分析的步骤如下。
(1)判断可知机构无局部自由度,即ζ=0。
(2)建立如图2所示的坐标系,各分支的运动旋量系Sbi为


图2 Sarrus机构及其运动旋量

(6)通过分析Sf的特点,很容易判断出来该机构的自由度为单自由度平动。
(7)由于机构位形改变后,各分支运动副间的几何关系未发生变化,因此计算结果仍然有效。由此可以判断该机构所具有的移动自由度为全周自由度。
通过以下步骤还可进一步对该机构进行过约束(包括公共约束和冗余约束)分析。
(1)求取动平台的约束旋量集〈Sr〉,确定机构的综合约束冗余因子c,分别为

(2)根据Sm=Sb1∪Sb2,求取整个机构的运动旋量系Sm,有


由此可知,计算结果与前面分析得到的自由度一致,表明分析正确。
例2用旋量理论分析图3所示3-RRRH并联机构[1]的自由度和过约束。图3中每一分支均由3个转动副(R)和一个螺旋副(H)组成,而且它们的运动副轴线相互平行。在基座上3个转动副轴线位于同一平面,且对称布置。

图3 3-RRRH并联机构及其运动旋量
解该机构可看成是由3个分支组成的多环机构,机构自由度分析的步骤如下。
(1)判断可知机构无局部自由度,即ζ=0。
(2)建立如图3所示的坐标系,确定各分支及运动副旋量的符号。各分支的运动旋量系Sbi为

(6)通过分析Sf的特点,很容易判断出来该机构的自由度为沿3个坐标轴的移动。
(7)由于机构位形改变后,各分支运动副间的几何关系未发生变化,因此计算结果仍然有效。由此可以判断该机构所具有的移动自由度为全周自由度。
通过以下步骤还可进一步对该机构进行过约束(包括公共约束和冗余约束)分析。
(1)求取动平台的约束旋量集〈Sr〉,确定机构的综合约束冗余因子c,即

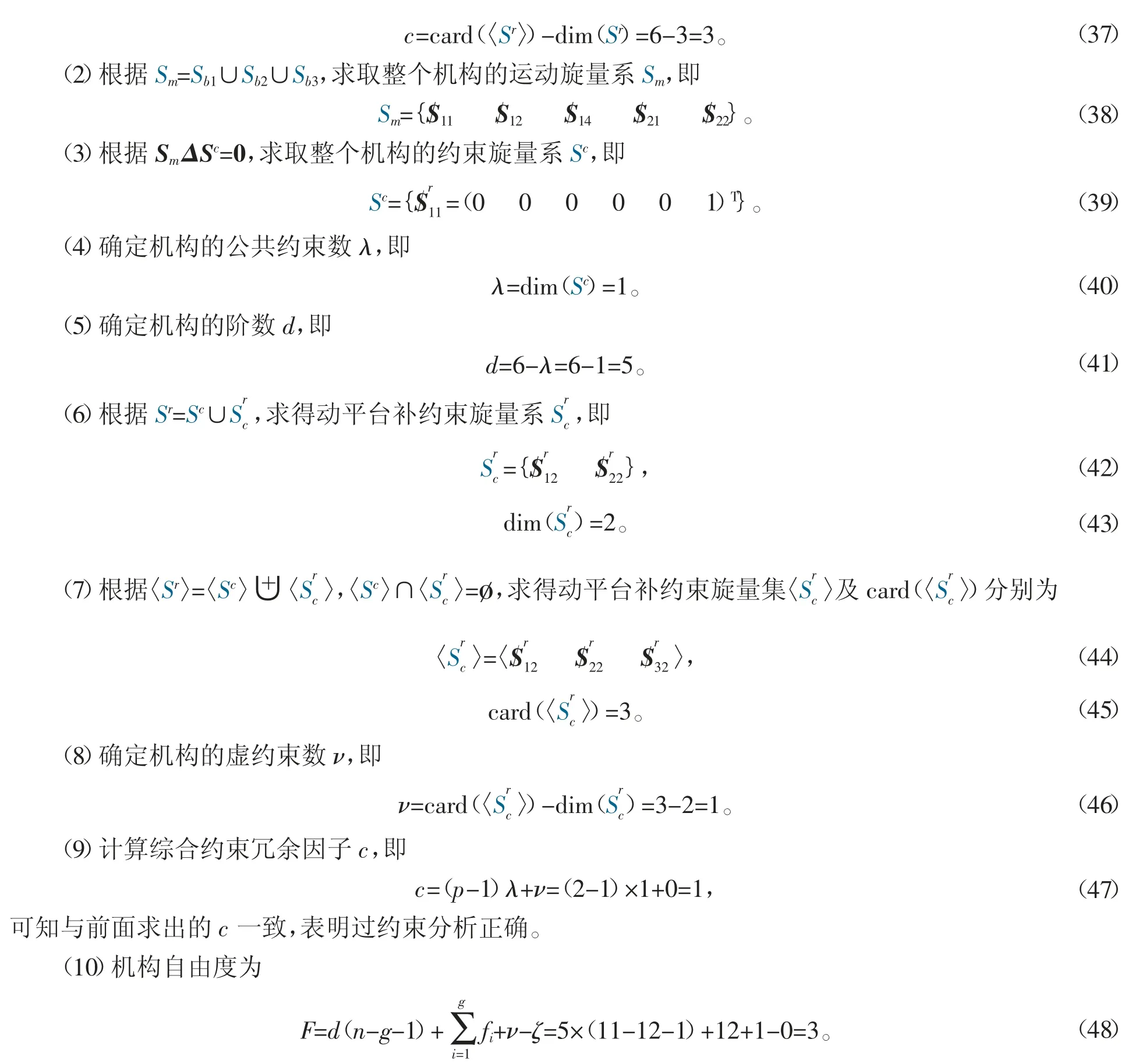
由此可知,计算结果与前面分析得到的自由度一致,表明分析正确。
从例2过约束分析的步骤7还可以得出机构的约束旋量集为

5 小结
本文指出基于旋量理论的机构过约束分析方法或步骤存在的问题,根据权威文献的理论公式,给出了改进后的分析步骤,并以算例加以验证。结果表明,改进后的分析步骤逻辑清晰,公式严谨,便于数据相互验证,使机构过约束分析的方法得到进一步完善,有利于基于旋量理论的机构自由度和过约束分析方法的推广应用。
