基于车架虚拟中心线的车桥车架测量方法
2021-01-25谢敏
谢 敏
(广西申龙汽车制造有限公司,广西 南宁 530299)
前言
一般车架的测量方法是测量车架支架到左右基准中对应一侧基准的距离,这种测量方法没有考虑车架变形以及左右基准自身误差的影响,容易出现累积误差[1]。前桥测量方法则是测量前轮和大梁左右差,以及左右轴距差,此方法也没有考虑车架变形,也会产生累积误差。而后桥采用推进线测量方法,将车架两处横截面中点拟合成整车虚拟中心线,测量后桥推进线和虚拟车架中心线的偏差值,此方法能够消除车架变形影响,较准确反映后桥和车架的位置关系。
目前客车车架大多为全承载结构,由小规格型钢组合而成。车架、前桥、后桥测量基准各不相同,车架变形和制作误差会导致车架、前桥、后桥的累积误差过大,测量数据失真。
本文参考后桥推进线测量原理,介绍一种前桥、后桥、车架都适用的车架虚拟中心线测量方法。该方法能够准确反映车架、车桥位置关系,车架和车桥使用统一的测量基准,从而消除基准误差,提高数据准确性。
1 基于车架虚拟中心线的后桥测量方法
后桥测量方法如下:在车架上取两处横截面的中点a、b,两点的连线为车架虚拟中心线,从后轮激光发射器发射一个垂直后桥的激光。通过调整激光发射器左右位置,激光通过b点射孔射到 a点激光接收器上。激光接收器上投影点和 a点左右距离为后桥推进线,详见图1。
后桥推进线和车架位置关系如下:

式中:αr为后桥垂线和车架虚拟中心夹角;Lt为后桥推进线(mm);Lab为车架中心点ab距离(mm)。
当后桥推进线为0时,后桥和车架中心线垂直,此时后桥左右轮胎到激光的距离差为后桥中心和车架中心的偏距。
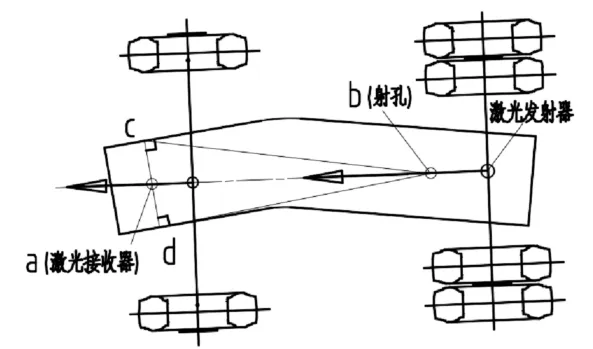
图1 后桥推进线测量原理
2 基于车架虚拟中心线的前桥测量方法
前桥为转向桥,目前尚无准确定位前桥垂直方向的激光发射装置,无法按后桥推进线方法测量前桥,只能通过测量前后桥相对位置的方法定位前桥。测量方法如下:
前桥左右轮到后桥射出的激光线距离差为前后桥左右偏距。前后桥左右轮轴距差则反映了前后桥的角度偏差,可通过左右轴距差值大致推算出前后桥夹角。

式中:αfr为前后桥夹角;△Lz为左右轴距差(mm)。Lcf为前桥左右轴距测量点间距(mm)。
当后桥推进线为0,后桥左右轮胎到激光的距离相等时,后桥中心在车架虚拟中心线上,并且垂直车架中心线,此时前后桥位置偏差实为前桥和车架位置偏差。
注:前桥为转向桥,测量前桥之前需将前轮转角调整为0°。当前轮和车架大梁平行时,前轮转角为前桥法线和车架大梁夹角。当前轮和后桥激光线平行时,前轮转角为前后桥夹角。因此当车架精度较高时,一般以前车架为基准,将前轮和车架调平行。当车架精度不高时,需多次调整轴距和前轮转角直至左右轴距相等,前轮和后桥激光线平行。
3 基于车架虚拟中心线的车架测量方法
由于前后桥位置是以车架的虚拟中心线为基准测量的。因此定位车桥的车架也必须以此中心线为测量基准才能减小数据的测量误差,车架和车桥数据才能相互对应。
3.1 车架虚拟中心线设定
定位车桥纵向的车架支架根据悬架类型可分为:板簧固定端支架,气簧导向臂支架,气簧纵向推力杆支架等。这类支架需保证左右支架安装孔中心点连线和车架中心线垂直,车桥才能和车架中心线垂直,才能确保车辆直线行驶不
磨胎[2][3]。
由于等腰三角形底边中点和顶点的连线垂直底边[4],因此可以将等腰三角形底边中点和顶点连线作为车架中心线。如图1所示,如将a点设为前桥左右纵向支架安装孔中点,b点为后桥左右纵向支架安装孔中点,ab连线为车架虚拟中心线。前桥左右纵向支架到b点距离(bc、bd)必须相等才能确保前纵向支架安装孔连线cd垂直车架中心ab。同理a点到后桥左右纵向支架安装孔距离相等才能保证车架中心 ab和后桥左右纵向支架安装孔连线垂直。
3.2 车架测量方法
图2为一款9米车前桥纵向支架和车架中心线位置关系示意图,车架中心线间距ab为4430mm,前桥纵向支架安装孔间距cd为942.5mm,车架制作误差导致支架安装孔中点连线cd和车架虚拟中心线ab夹角为89°。通过作图法测得出bc间距 4463.17mm,bd间距 4446.81mm,bc,bd差值为16.36mm。
画一个和 bc等长的圆弧和左侧车架相交与 d’点,此时dd’间距为16.42mm,和bc,bd差值几乎相等。由于车架本身有工装定位,从历年调整车桥用的垫片厚度看,车架支架误差不超过7mm。因此可将车架中心点a、b到另一端车桥纵向支架左右安装孔间距差当作是车桥支架前后方向制作误差,此方法产生的数据偏差可以接受。
上述测量方法校正之后的前后桥左右纵向支架,可作为车架测量基准,测量车架上车桥悬架其它相关支架位置。

图2 车架位置关系示意图
注:图2中cd’间距为942.64mm,支架校正前后车架中点a和a’左右偏距为(942.5-942.64)/2=0.07mm。从图中可看出:支架前后方向偏差 16.42mm时,车架中心横向位移0.07mm,可认为支架校正前后车架中心线 ab和 a’b重合,不会出现支架校正后导致车架中心线变化,需反复修正另一端支架无限循环情况。同时也说明:定位车架中点时,车桥纵向支架前后方向定位精度要求不高,人为操作误差影响小。
3.3 车架中心线定位误差
由于每次测量车架和车桥都需要重新定位车架中点,因此车架中点定位重合度高,才能确保车架中心线位置不变,才能减小数据的测量误差。如车架、激光接收器和射孔位置不水平,都会导致车架中点(a,b)左右方向位移,导致车架中心线位移。因此测量前除调平车架、定位仪器姿态外,最好通过做标记方法检查每次定位的车架中点是否重合。
4 结论
综上所述,通过将前后桥左右纵向支架安装孔中点a,b两点连线作为车架虚拟中心线,并建立一套基于车架虚拟中心线的车架车桥测量方法,使得车架、车桥能够在同一基准下测量,消除了车架变形和多基准之间误差影响。
此检测方法,将整车制作过程中最初工位(制作车架)和最末工位(下线调试)测量数据相互精准关联,能够在车架制作期间就能及时发现,及时补救,从而减少后续工位调整改制工作量。
