一种电动汽车制动能量回收系统研究
2021-01-25徐国胜刘洪思陈磊
徐国胜,刘洪思,陈磊
(安徽江淮汽车集团股份有限公司 新能源乘用车公司,安徽 合肥 230601)
前言
新能源汽车的制动能量回收系统能够大幅提高整车能量经济性,同时也是整车制动安全性、制动舒适性的重要影响因素,因此成为新能源汽车一项共性关键技术和一种具有核心竞争力的零部件产品[1]。随着电子技术和汽车底盘技术的发展,高效、节能的电液助力技术逐渐地被应用到新能源汽车上。与传统制动系统相比,其以电子元件替代了部分机械元件,取消了制动踏板与制动轮缸之间的机械连接,不需要真空助力器;电子制动踏板通过传感器采集驾驶员的制动命令,由控制器进行驾驶员制动意图识别,根据不同的行驶工况,驱动制动执行机构完成制动控制,很大程度上弥补传统制动系统的不足,充分利用车轮与路面附着,提高制动效率及车辆行驶稳定性[2-3]。
1 电液助力系统设计
1.1 系统机构
电液助力系统(eBooster)结构上选用分体式总泵助力电子液压式线控制动系统的结构方案,通过蜗轮蜗杆/齿轮齿条筒减速增扭机构,将助力电机的转动转化为制动主缸活塞的平动,驾驶员踩踏制动踏板的反馈力由机械解耦机构提供。系统主要由电机、蜗轮蜗杆-齿轮齿条减速机构、踏板模拟器、制动主缸和中央控制器等部分组成,如图1所示。
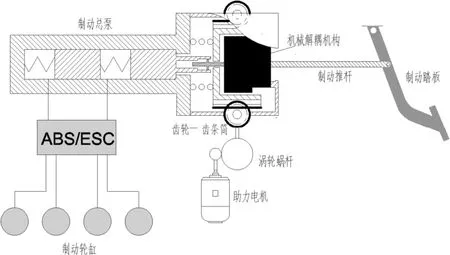
图1 电液助力系统结构示意图
1.2 系统工作原理
车辆制动时,当驾驶员踩下制动踏板,eBooster中央控制器通过采集踏板位移传感器的位移信号、轮缸压力传感器的压力信号、液压控制单元的制动压力信号以及路面状况识别信号,确定助力电机的目标输出扭矩的大小,并控制助力电机的实际输出扭矩跟随助力电机的目标输出扭矩;助力电机与涡轮蜗杆减速增扭机构连接,再通过齿轮-齿条筒的啮合,将助力电机的转动转化为齿条筒的平动,齿条筒推动制动主缸活塞推杆运动,产生总泵制动压力,制动液分别通过制动管路推入液压控制单元,再通过与液压控制单元相连的各个制动管路,推入各轮缸制动器,从而对车辆实施制动。此过程中,只有齿条筒会顶到主缸活塞推杆,制动踏板推杆始终会与主缸活塞保有间隙,驾驶员制动力反馈完全由踏板模拟器提供,如图2所示。
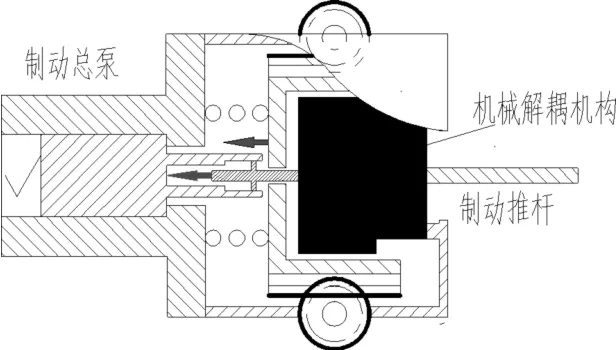
图2 eBooster-电机助力模式示意图
当车辆处于制动能量回收模式时,踏板模拟器处于模拟状态,为驾驶员踩踏制动踏板提供反作用力,同时助力电机处于非助力状态,制动力由制动能量回收电机提供,此时总泵外端活塞杆同制动踏板推杆有足够间隙,保证驾驶员制动感觉完全由模拟器提供,不被制动能量回收影响。
当eBooster系统失效时,此时踏板模拟器弹簧将不再对驾驶员提供模拟力,驾驶员在踩下一定制动位移后,制动推杆将直接推动制动总泵产生制动压力,对车辆实施制动,驾驶员制动踏板反馈力直接由制动主缸提供。
2 制动能量回收系统设计
2.1 系统方案
根据制动力分配模式不同,可将制动能量回收系统划分为并联型和串联型两类。并联型是在驱动轴采用机械制动与电机制动的联合制动,二者同时、并行地产生制动力,而在非驱动轴上依然采用传统的机械摩擦制动,该系统存在能量回收利用率,踏板感较差。串联型的制动力由电机制动力和制动器制动力共同组成,电机制动力占主要地位,剩余部分由制动器来提供,制动器制动力与电机制动力的总和等于驾驶员期望制动力[4-5]。串联型可实现能量回收效率最大化,具有较好的踏板感,本文基于电液助力系统设计一种串联型能量回收系统方案,如图3所示。
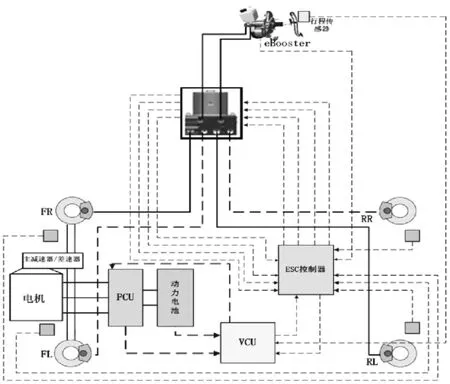
图3 制动能量回收系统架构
2.2 控制策略设计
采用“以提高能量回收效率为目标的复合制动控制策略”的回收模式,在制动过程中优先采用回馈制动,不足的驾驶员制动需求用液压制动进行补充。制动能量回收系统的功能集成在整车控制器中,驾驶员踩制动踏板,根据制动踏板力大小,eBooster进入相应工作,制动控制器识别驾驶员制动意图,计算出总的制动力,整车控制器(VCU)根据电池、电机状态,发出系统当前可回收功率和电机回馈制动力,制动控制器根据电机制动力和总的制动力,协调液压制动力,保证驾驶员的总的制动力需求不变。
在一定车速下,驾驶员期望以固定减速度实施制动,制动开始时,由于电机回馈制动力无法产生足够的车辆减速度,液压制动力介入,以补充回馈制动力的不足;当车速逐渐降低,液压制动力逐步减小,直到完全退出,仅由回馈制动力实现制动;在车速降至较低时,由于电机在此工作区间回馈制动能力又无法满足要求,液压制动重新介入,直到车速为0,如图4所示。
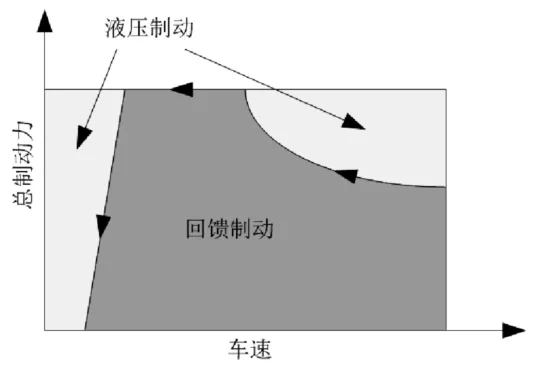
图4 复合制动控制策略示意图
图5所示为变制动强度复合制动控制策略示意图,试验车辆为前轴电驱动车辆,当制动强度z小于地面附着系数μ时(假定μ=0.8,z=0.6g),则前后制动力分配在AB段之间变化。
(1)当最大回馈制动力在Freg1范围内时(如图中C点),前轴制动力全部由回馈制动提供,后轴制动力数值对应D点;(2)当最大回馈制动力小于 A点对应的前轴制动力时(如图中 E点),则回馈制动力取最大值,由前后轴液压制动提供剩余制动强度需求。为了将整车制动力控制在I曲线上的F点,将前后轴液压制动分别控制在L点和G点;(3)当最大回馈制动力大于B点对应的前轴制动力时,则回馈制动对应于B点的前轴制动力,后轴液压制动对应于B点的后轴制动力。

图5 变制动强度复合制动控制策略示意图
2.3 制动液压系统执行策略

图6 液压系统不参与制动示意图
基于小强度制动工况下,仅有回馈制动工作,液压系统不提供摩擦制动力,踏板模拟器的常开阀EV通电关闭,常闭阀AV通电打开,制动液从主缸通过踏板模拟器的AV阀进入活塞中,从而隔断主缸和轮缸的压力,屏蔽液压制动,如图6所示。
当电机回馈制动不足时,液压制动系统主动增压,进行制动力补偿,ESC的常闭阀HSV通电打开,常开阀USV关闭,电机泵通电运行,ESC通过主动增压功能,泵取储液罐的制动液到相应的轮缸,提供相应的制动压力,最终产生摩擦制动力,如图7所示。
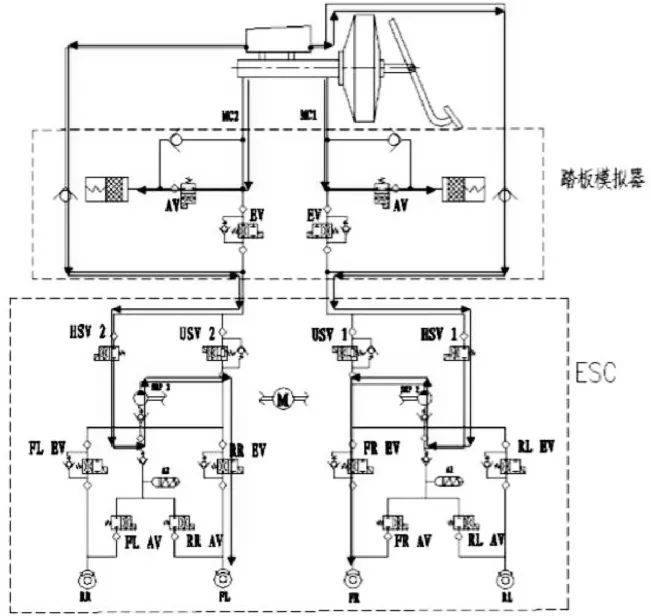
图7 液压系统参与制动示意图
当电机回馈制动失效或者条件不满足时,则踏板模拟器的常开阀EV和常闭阀AV同时断电,恢复正常液压制动,如图8所示。
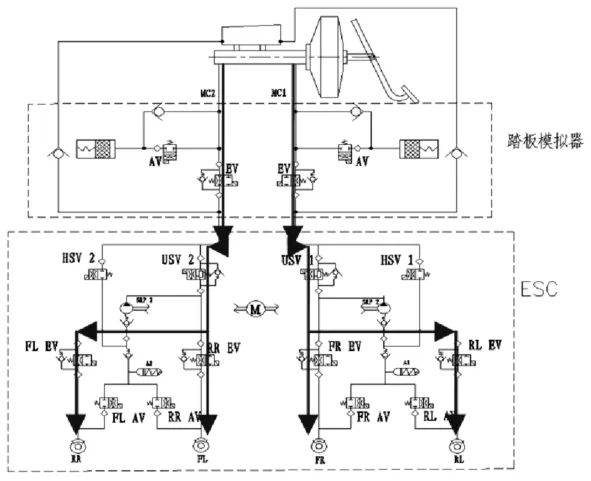
图8 无电机回馈制动,液压制动示意图
3 试验验证
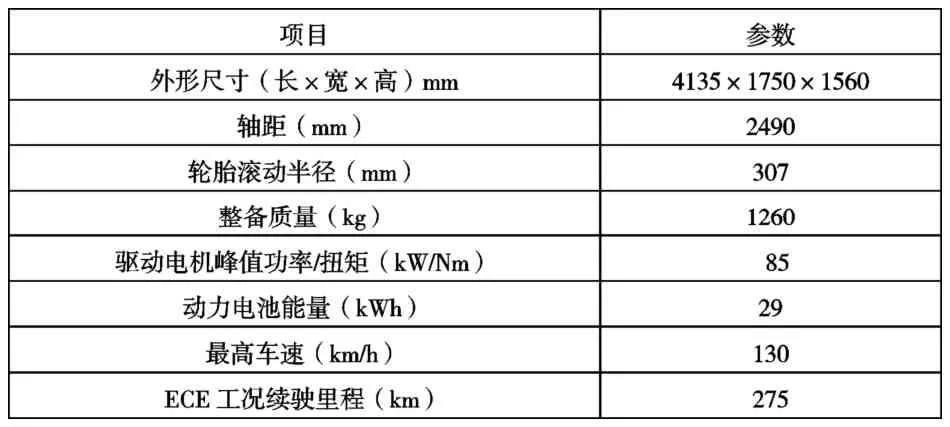
表1 整车参数表
以某前轮驱动纯电动车为对象,在现有液压制动系统的基础上,匹配eBooster和ESC,整车控制器VCU负责能量回收和制动力协调控制单元,整车参数如表1所示。
3.1 制动能量回收功能测试
(1)较大制动强度
紧急制动或车辆低速下制动,电机制动力无法满足制动需求,前后轴仅液压制动,无电机制动,踏板模拟器的常开阀EV和常闭阀AV同时断电,恢复传统液压制动,如图9所示。
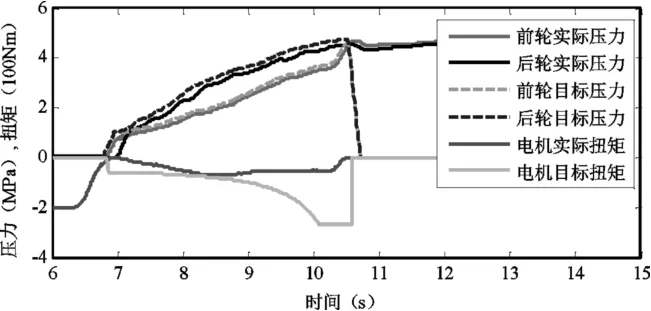
图9 较大制动强度测试
(2)中等制动强度
在驾驶员中等制动强度时,踏板输入略有抖动。中等制动强度需求,前轴电机制动,后轴液压制动,ESC的常闭阀HSV通电打开,常开阀USV关闭,电机泵通电运行,ESC通过主动增压功能,泵取储液罐的制动液到相应的轮缸,提供相应的制动压力,产生摩擦制动力,如图10所示。
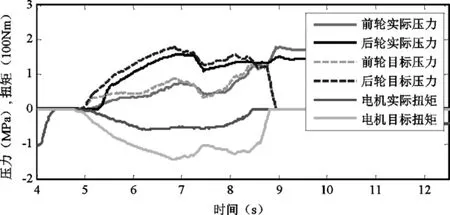
图10 中等制动强度测试
(3)小制动强度
在驾驶员小制动强度时,前期仅使用电机制动,车速降低电机制动不足,由液压制动补足,实现液压制动和电机制动的协调,如图11所示。

图11 小制动强度测试
3.2 制动能量回收性能测试
针对试验样车开展ECE工况续驶里程试验,记录电池放电电量和回收的电量,分不同电量SOC区间,根据制动能量回收评价标准[6],回收能量与总放电量的比值,计算出ECE工况下的能量回收贡献率,结果如表2所示,在全减速阶段,车速7km/h以上仅由电机制动力产生,7km/h以下,电机制动力退出,仅液压制动,在SOC 30-20%区间,ECE循环工况经济性贡献率最高达28.9%。

表2 ECE工况制动能量回收贡献率
4 结论
(1)电液助力系统代替传统真空助力器,利用制动主缸里的电机实施助力,可以满足纯电动车对制动系统的要求,基于电液助力系统设计的整车制动能量回收策略,在不影响驾驶员驾驶感觉的基础上提供精确的液压补偿,配合整车实现踏板解耦的串行能量回收功能,具有较高的能量回收贡献率,提升车辆续驶里程。
(2)基于电液助力系统的制动能量回收系统,各个系统的独立性、降低数据交互的复杂耦合,电机控制器和电池控制器由整车控制器协调控制,而ESC控制器只发送扭矩请求指令给整车控制器,而整车控制器把相关的电机、电池状态发送给ESC控制器,具体制动力控制和解耦过程通过上述的控制策略进行,该协调工作方式最大限度地保证了各个系统的独立性、制动安全性、系统的鲁棒性。
