电动汽车多自由度整车建模与仿真分析
2021-01-25栗振闯冉涛孙琛苏丹丹
栗振闯,冉涛,孙琛,苏丹丹
(1.河北大学 质量技术监督学院,河北 保定 071002;2.保定长安客车制造有限公司,河北 定州 073000)
前言
随着计算机技术和汽车动力学理论的发展,虚拟样机作为一项以动力学理论为基础,利用计算机进行整车建模与仿真分析的新兴概念,在缩短整车设计周期、及时排查汽车安全问题和降低车辆研制成本等方面得到广泛应用[1],尤其在当下新型电动汽车技术的研制中发挥着重要作用。
汽车虚拟样机技术开发的核心内容是车辆动力学。有关车辆动力学的研究,国内外学者均作出了大量贡献,如国内的郭孔辉院士针对两轴车辆讨论建立了 12自由度非线性模型[2];密歇根大学的W.Riley.Garrot建立了具有十七个自由度的数字化模型[3];日本东京大学的Sakai Shin-ichiro等人采用不考虑垂向运动的7自由度整车模型完成了电动汽车动态驱动/制动力分配的研究[4];辽宁工业大学李刚等人基于 Matlab/Simulink 建立了 15自由度四轮轮毂电机电动汽车模型[5];以及吉林大学靳立强等人基于四轮独立驱动电动汽车建立了18自由度四轮独立驱动电动汽车动力学模型[6]。
然而,以上有关车辆动力学建模的研究,仅考虑了提升模型的复杂度,忽略了对不同自由度模型的横向对比分析。因此本文利用Matlab/Simulink建立了经典的2自由度、7自由度和10自由度整车动力学模型进行横向对比,探求不同自由度整车模型的适用工况。
1 多自由度整车动力学模型
1.1 二自由度整车模型DOF_2的建立
根据简化的二自由度整车模型在车辆坐标系中的运动状态,建立整车的横向与横摆运动微分方程如下:

式中:β为质心侧偏角(rad);δ为前轮转角(rad);u为整车质心纵向速度(m/s);ωr为整车横摆角速度(rad/s)。
在 Matlab/Simulink中搭建线性二自由度整车动力学模型如下:
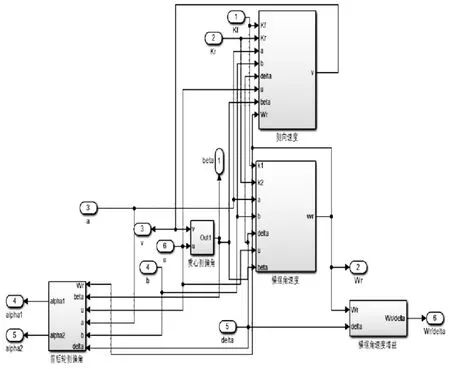
图1 二自由度整车Simulink动力学模型
1.2 七自由度整车模型DOF_7的建立
车轮是车辆与路面之间进行力学传递的主要部件,作用于其上的纵向力、侧向力和垂向载荷等对汽车的操稳性有着重要影响。基于轮胎魔术公式,增加四个车轮的滚动和簧上质量沿车辆坐标系x、y轴的移动与绕z轴的横摆运动,建立了7自由度整车模型(DOF_7)。
式中:x轴选取汽车的纵向速度方向,并规定前进为正;y轴选取汽车的横向速度方向,规定向左为正;z轴则通过汽车的质心竖直向上,有关横摆角速度及质心侧偏角等分析以逆时针方向为正。
车身的运动学方程如下:
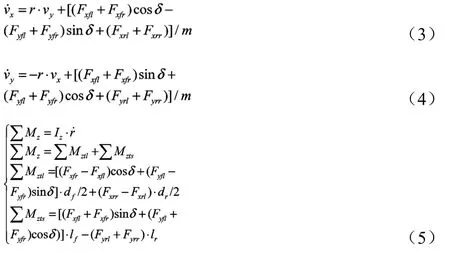
车轮的动力学方程如下:
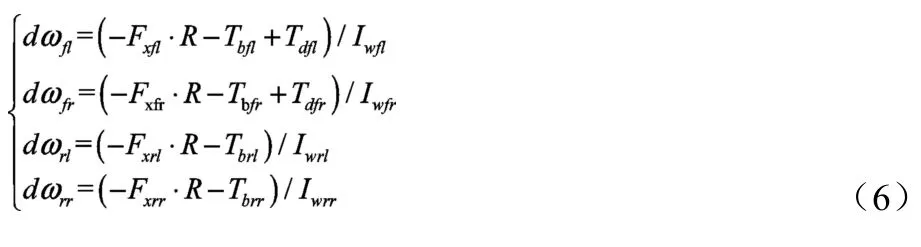
式中:Tdfl、Tdfr为两前轮驱动转矩(N·m),Tbfl、Tbfr、Tbrl、Tbrr为四个车轮制动转矩(N·m),ωfl、ωfr、ωrl、ωrr为四个车轮转动角速度(rad/s);vx为整车纵向速度(m/s);vy为整车横向速度(m/s);Fxfl、Fxfr、Fxrl和Fxrr分别为四个车轮纵向力(N);Fyfl、Fyfr、Fyrl和Fyrr分别为四个车轮的侧向力(N);r为整车横摆角速度(rad/s);∑Mz为绕z轴惯性矩(N·m);∑Mztl为车身俯仰力矩(N·m),∑Mzts为车身侧倾力矩(N·m)。
根据以上动力学和运动学微分方程,在Matlab/Simulink中搭建7自由度整车动力学模型(如图2)。
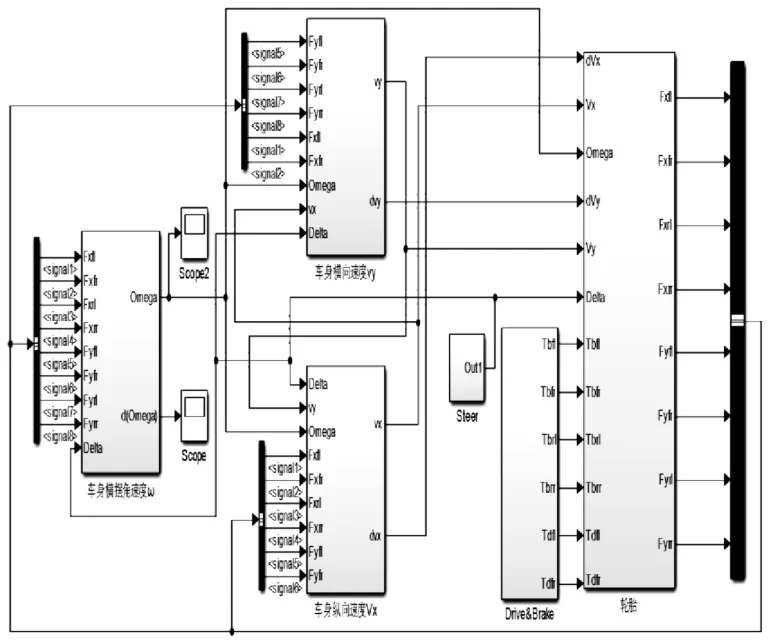
图2 七自由度整车Simulink动力学模型
1.3 十自由度整车模型DOF_10的建立
悬架变形将引起车身的侧倾、俯仰和垂向运动,对汽车的操纵稳定性和行驶平顺性。在7自由度整车动力学模型基础上,通过引入悬架模型和时域路面不平度激励,建立了10自由度的整车模型DOF_10。
公式(7)、(8)和(9)分别为整车纵向、横向和垂向动力学微分方程:
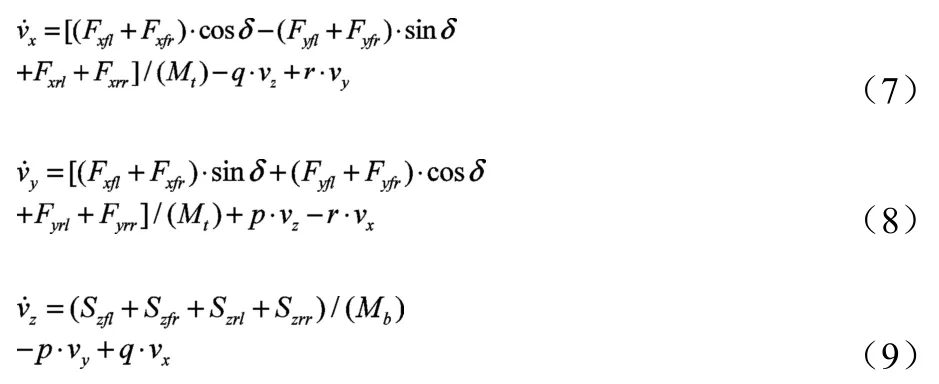
式中:vz为整车的垂向运动(m/s);p为整车围绕y轴的转动角速度(rad/s),q为整车围绕x轴的转动角速度(rad/s);Szfl、Szfr、Szrl、Szrr分别为四个悬架变形产生的力(N)。
公式(10)、(11)和(12)分别为整车侧倾、俯仰和横摆动力学微分方程:
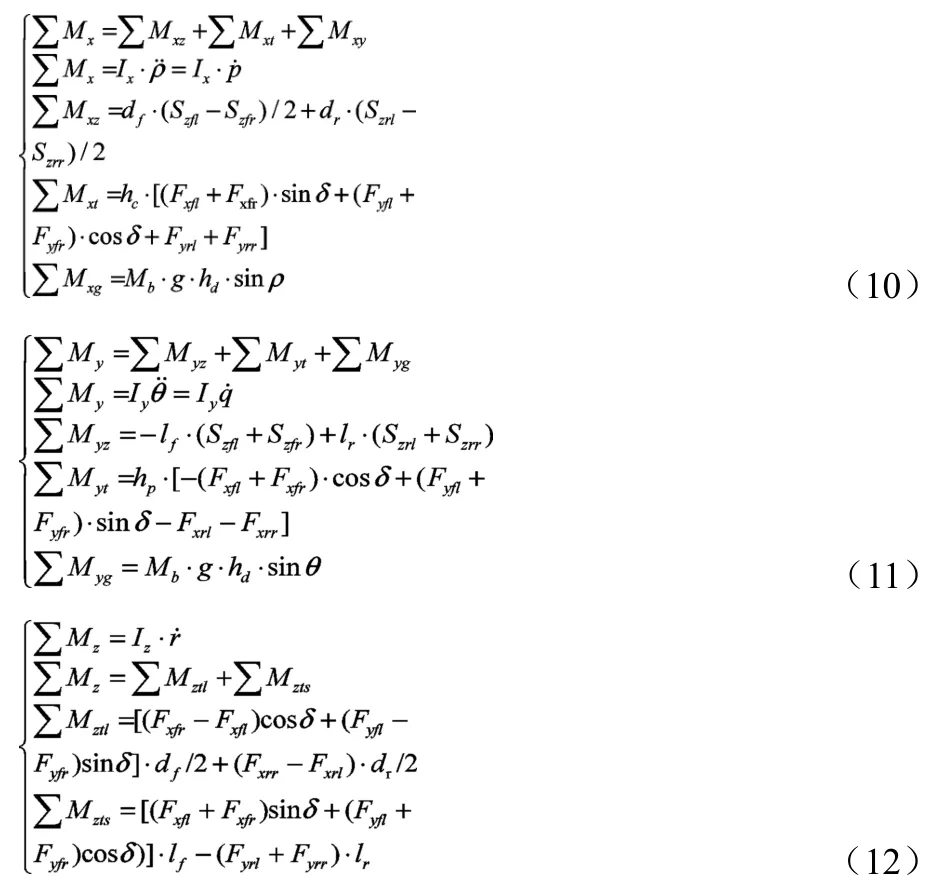
式中:∑Mx、∑My和∑Mz分别为整车围绕x、y、z轴的惯性矩(N·m);∑Mxz、∑Mxt和∑Mxg分别为悬架垂向作用力、车轮力和车身重力产生的侧倾力矩(N·m);∑Myz、∑Myt和∑Myg分别为悬架垂向作用力、车轮力和车身重力产生的俯仰力矩(N·m);∑Mztl和∑Mzts分别为车轮纵向力和侧向力产生的车身横摆力矩(N·m);ρ和θ分别表示车身的侧倾角和俯仰角(rad);p、q分别表示整车的侧倾角速度、俯仰角速度(rad/s)。
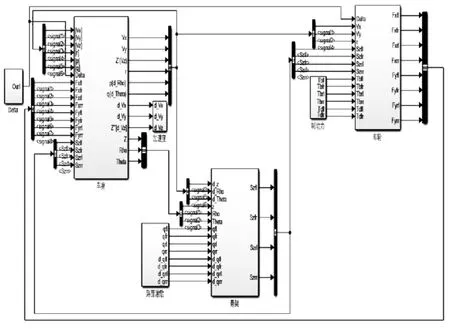
图3 七自由度整车Simulink动力学模型
基于以上公式,在Simulink内建立了10自由度的整车模型(如图3)。
2 仿真对比分析
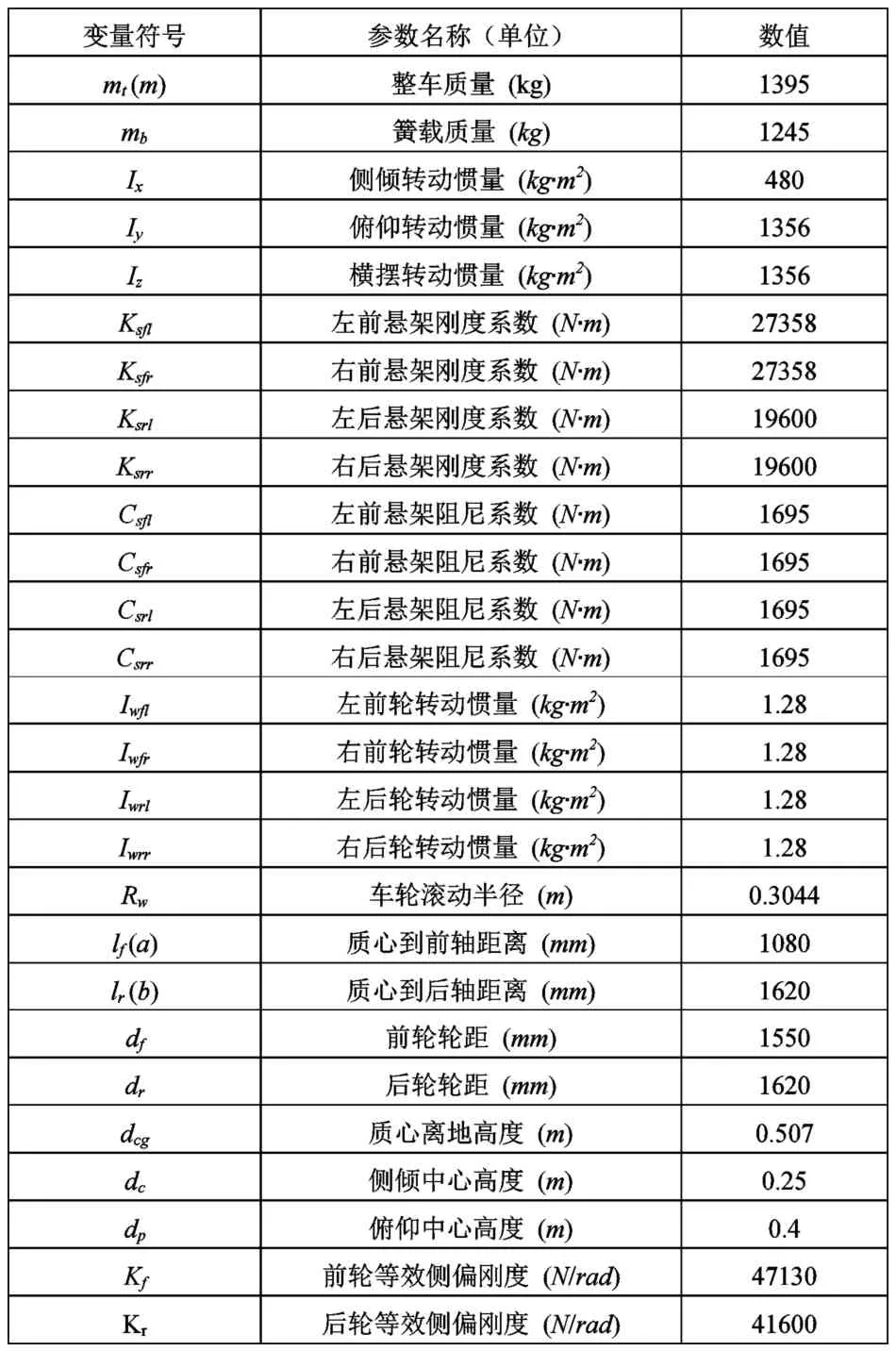
表1 整车参数
仿真工况:在1s时给与方向盘一个正弦信号,模拟整车的单移线工况;改变汽车的行驶车速,通过观察整车的横摆角速度变化,分析不同自由度模型的适用工况。相应的输入信号和仿真输出曲线如下:
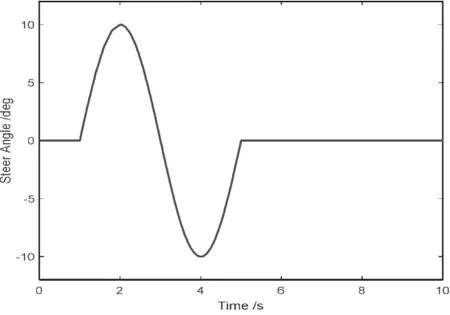
图4 转向盘输入信号
当汽车以 3.6km/h转向行驶时,DOF_2、DOF_7和DOF_10模型的横摆角速度变化不大(图5);汽车以72km/h转向行驶时,DOF_2和DOF_7的横摆角速度曲线基本重合,但DOF_10的横摆角速度变化明显较大(图6)。
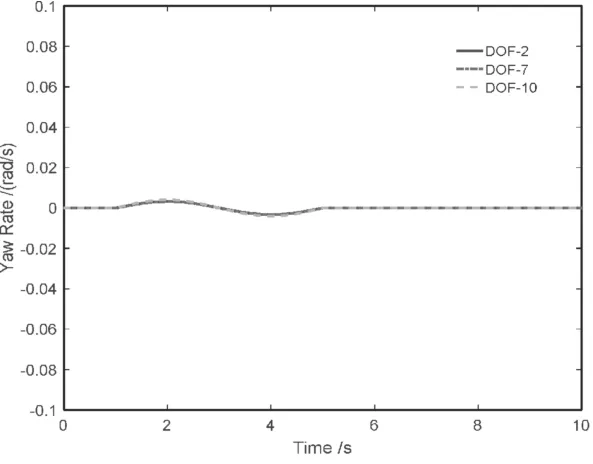
图5 车速3.6km/h时的仿真输出信号
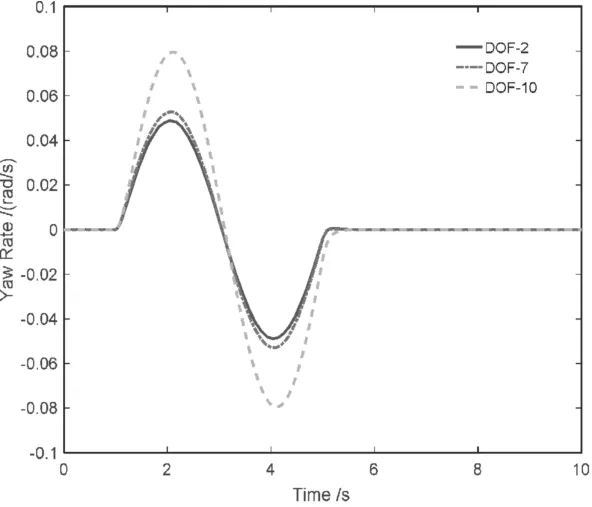
图6 车速72km/h时的仿真输出信号
分析以上原因是当汽车以较高车速转向行驶时,整车的离心加速度显著增大,进而引起车身侧倾;而车身侧倾改变了内外侧车轮的垂向载荷,从而对轮胎的侧偏特性产生影响;最终影响了整车的操稳性,即导致DOF_10模型的横摆角速度变化显著。此外,由DOF_2和DOF_7的仿真对比可见,在较小的误差范围内,线性二自由度整车模型有关四轮车辆的操稳性仿真结果是准确且高效的。
由以上横向对比分析可知,本文建立的DOF_10整车模型在传统动力学模型的基础上增加了对侧倾、俯仰和垂向运动的考虑,不仅较为准确地反映了侧倾运动等对整车操稳性的影响,同时可反映车速和路面不平度等对整车平顺性的影响,故该模型在“低速-小转角”、“高速-大转角”以及“制动滑移”等多种工况的仿真实验具有显著的优越性。
3 结论
本文基于Matlab/Simulink分别建立了二自由度、七自由度和十自由度的整车模型,并对所建模型进行了单移线工况的仿真对比实验。仿真结果表明,十自由度整车模型(DOF_10)可精确地反映整车在“低速-小转角”、“高速-大转角”以及“制动滑移”等多种工况下的运行情形,可为多工况下整车控制和自适应巡航等项目的开发提供动力学平台。
