基于三维空间机构的教学用拆装实验装置设计
2021-01-22徐英帅万智辉黄伟莉赵杰
徐英帅,万智辉,黄伟莉,赵杰
(东华理工大学机械与电子工程学院,南昌330013)
0 引言
当前高校人才培养质量最突出的问题主要体现在学生实践能力不强、创新精神不足,因此在教学当中通过实践课程培养学生的创新精神与创新能力尤为重要[1-2]。开设机构拆装实验是培养学生机械创新意识与创新能力的有效措施[3]。
机构拆装实验装置落后是学生创新思维和创新能力培养的一大障碍,因此需要有功能完善且拆装操作方便、灵活的实验设备条件。目前,高校的机构拆装实验装置还主要局限于单一动力源、一个自由度等平面机构,由于经费不足等原因,设备老旧及更新困难的现象还普遍存在[4]。另外,传统的机构拆装实验装置通常还具有体积大、操作繁琐等特点,不利于达到预期的教学目的。
1 拆装实验装置的特点
针对现有技术中存在的问题,设计一种基于三维空间机构的教学用拆装实验装置,该装置具有体积小、结构紧凑、功能完善、拆装操作方便、灵活及经济成本低等特点,不但可以提高现有机构拼装实验装置水平,而且可以改进实践教学方法。
基于三维空间机构的教学用拆装实验装置的各构件不全部在同一个平面或者平行平面内运动,它具有运动多样、结构紧凑、灵活可靠的特点。一些用平面机构难以实现的运动规律及空间轨迹曲线可以通过三维空间机构来实现,因而三维空间机构在各种工作机构中得到了广泛的应用,完全可以满足相关课程的教学需求[5-6]。
结合相关理论和教学经验,在基于三维空间机构的教学用拆装实验装置上集成了带传动机构、圆锥齿轮机构、蜗轮蜗杆机构、外齿轮机构、摆动导杆机构、平行四边形机构、马尔他槽轮机构、齿轮齿条机构、曲柄摇杆滑块机构等,可以根据实际需要拼装平面机构和空间机构,有助于加强学生的机械创新意识,提高机械综合设计能力。针对不同的教学目的,可以利用该实验装置进行拆卸实验和拼装实验,同时也可以观察机构的运动特征。
2 拆装实验装置结构设计
图1所示为一组拼装好的三维空间机构,在此空间机构的基础上便可以练习拆卸实验,并可通过观察整个机构的运转情况进一步掌握该机构的运动特征。图中的三维空间机构主要由立体支架、驱动电动机、电气盒子,以及相配套的若干组机械结构组成,其中驱动电动机、电气盒子和机械结构均可拆卸地设置在立体支架上。为了保证使用安全、操作方便和设备美观,配备了电气盒子,并在电气盒子的面板上设置了电动机调试旋钮和电源开关。驱动电动机的最大转矩为16.9 N·m,最大转速为18 r/min,电源为AC220 V、50 Hz,功率为0.9 kW,与电气盒子电连接后开启电源便可驱动机械结构动作,并可检验空间机构创新模型的设计是否合理。这里面的机械结构可以是带传动机构、圆锥齿轮机构、蜗轮蜗杆机构、外齿轮机构、摆动导杆机构、平行四边形机构、马尔他槽轮机构、齿轮齿条机构、曲柄摇杆滑块机构等中的一种或几种组成,每种机构也可以是一组或多组,上述各机构直接或间接通过驱动电动机驱动,最终使所有机构一起协调运转。
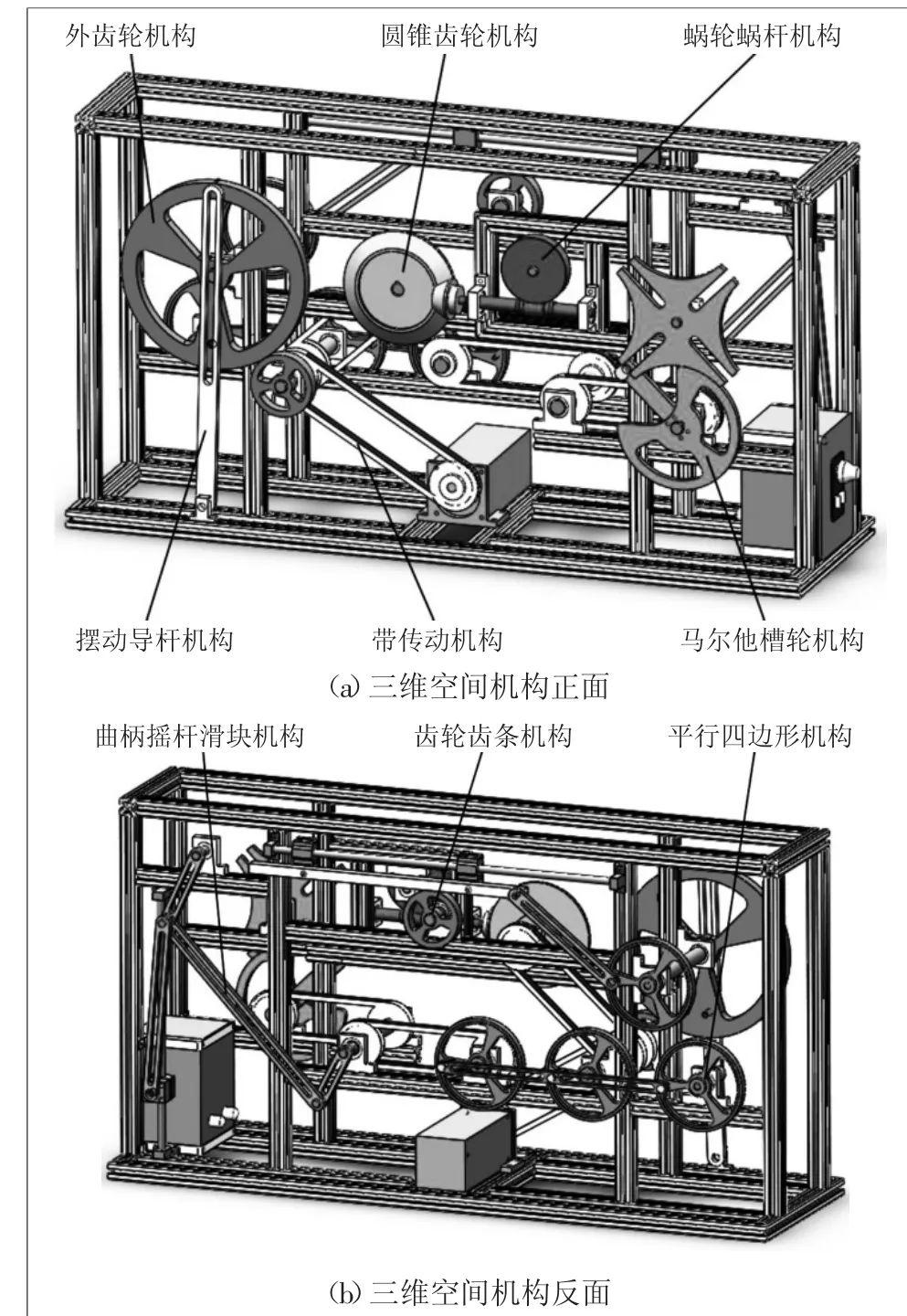
图1 拼装好的典型三维空间机构
每种机构也是由若干个不同的零部件拼装组成的,如果要进行拼装实验就需要熟悉都有哪些零部件,以及各机构是由哪些零部件组成的。主要的零部件包括V带轮、皮带、大锥齿轮、小锥齿轮、蜗轮、蜗杆、大直齿轮、小直齿轮、摇杆、车轮、主槽轮、从槽轮、齿条、连杆、滑块、连接轴、轴承支座、支座导轨等。其中,在摇杆上还设置有移动槽,在大直齿轮上设置有用于伸入到移动槽内的凸柱。上述各零部件至少设置一个,根据实际需要可以设置有多个,需要操作者提前构思好所要拼装的机械结构,再利用相关零部件进行拼装。利用相关零部件在立体支架上可以拼装出多种不同的机械结构,使用电动机驱动所拼装的机械结构,打开电气盒子的开关就可使整个机构运动,以达到机械创新设计的目的。
带传动机构主要由V带轮、皮带和连接轴拼装组成;圆锥齿轮机构主要由大锥齿轮、小锥齿轮和连接轴拼装组成;蜗轮蜗杆机构主要由蜗轮、蜗杆和轴承支座拼装组成;外齿轮机构主要是由大直齿轮、小直齿轮和连接轴拼装组成;摆动导杆机构主要是由摇杆、大直齿轮和轴承支座拼装组成;平行四边形机构主要是由车轮、连杆、连接轴和轴承支座拼装组成;马尔他槽轮机构主要由主槽轮、从槽轮、连接轴和轴承支座拼装而成;齿轮齿条机构主要是由齿条、车轮、连杆、滑块、小直齿轮、连接轴、轴承支座和支座导轨拼装组成;曲柄摇杆滑块机构主要由连杆、滑块、连接轴、轴承支座和支座导轨拼装组成。另外,也可以根据相关零部件在立体支架上拼装出其他机械结构。
在进行拼装实验时,需要在立体支架上进行拼装,立体支架由底架、顶架和中部支架组成,其最大外形长×宽×高尺寸为1200 mm×350 mm×650 mm。底架的宽度大于顶架的宽度,底架的长度与顶架的长度相同,底架由10根横梁拼接组成,顶架由4根横梁组成矩形形状。中部支架通过8根立柱将底架和顶架联接到一起,另外还配备了一些长度相对较短的立柱和横梁用来支撑相应的机械结构。立体支架的主体结构如图2所示,在实际拼装时可以适当增加一些短横梁和短立柱,但只能改变中部支架,底架和顶架是固定不变的。

图2 立体支架的主体结构
综上所述,如果要进行拆卸实验可以在图1的基础上进行相关操作,如果要进行拼装实验可以在图2的基础上进行相关操作。另外,所设计的拆装实验装置中连杆与连杆之间的联接部分可以在一定范围内进行调节,同时滑块偏心距也可以进行一定的调节,从而可以在机械拆装的基础上进行机械传动系统的运动分析,分析参数改变对机构运动的影响,以及机构上某些点的轨迹、速度、位移等。不但有助于学生理解相关的理论知识,还可以锻炼学生的创新及动手能力。
3 拆装实验方案分析
拆装实验方案有很多种,实际上拆卸实验和拼装实验是两个完全相反的过程,二者只要掌握其一就能够摸索完成另一种实验,但两种实验可以从不同角度锻炼学生的创新思维和动手能力。下面以拼装实验为例来叙述其中一种典型的方案,在掌握此方案的基础上容易构思出更多的拆装实验方案,有利于开发设计性综合实验。
为了使所拼装的机构正常运转,必须首先将驱动电动机和电气盒子安装到立体支架的合适位置。如图3所示,在立体支架的端部安装电气盒子,在底架中部的两个短横梁上安装驱动电动机,当然也可选择其他的适当位置进行安装。
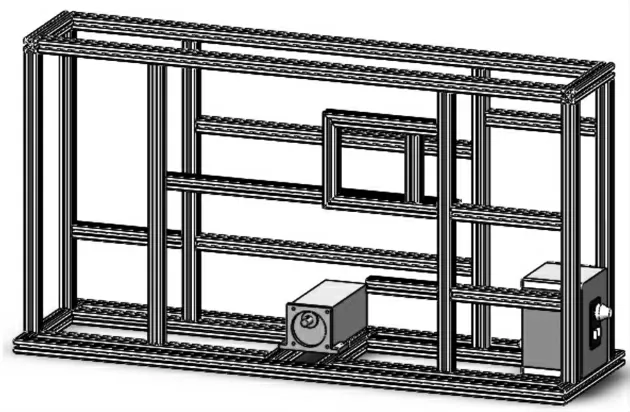
图3 安装驱动电动机和电气盒子
如图4所示,在驱动电动机左斜上方立体支架的相应位置设置连接轴,并用轴承支座固定,在驱动电动机及连接轴上各设置一个V带轮,用皮带连接2个V带轮构成带传动机构。在驱动电动机上方借助3个轴承支座将蜗轮蜗杆机构安装在立体支架上。在蜗杆的端部连接小锥齿轮,大锥齿轮通过连接轴固定到立体支架上,并与小锥齿轮相互啮合构成圆锥齿轮机构。同时,在安装大锥齿轮的连接轴上安装1个V带轮,与第一个带传动机构的连接轴同轴再安装1个V带轮,将2个V带轮通过皮带相连又构成一个带传动机构。开启电气盒子的电源开关并调节电动机调试旋钮,即可使驱动电动机带动第一个带传动机构运转起来,同时带动第二个带传动机构、圆锥齿轮机构及蜗轮蜗杆机构一起动作。
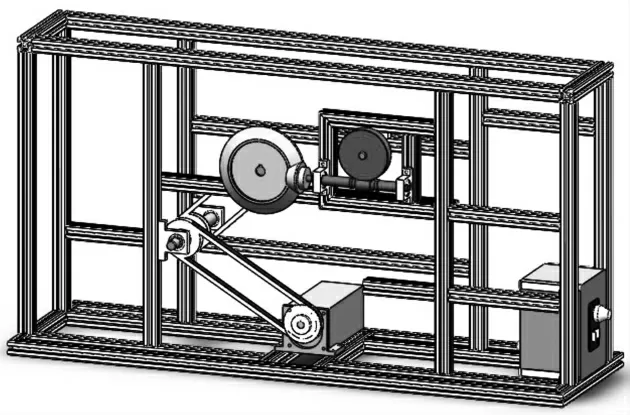
图4 拼装带传动机构、蜗轮蜗杆机构和圆锥齿轮机构
如图5所示,在立体支架的合适位置安装1根连接轴,并在连接轴上安装大直齿轮,与第一个带传动机构的连接轴同轴再安装1个小直齿轮,大直齿轮和小直齿轮相互啮合构成外齿轮机构,外齿轮机构可以随带传动机构一起运转。在大直齿轮下侧立体支架的底架横梁上安装轴承支座,轴承支座与设置有移动槽的摇杆的一端相连,摇杆的另一端与大直齿轮相连,在大直齿轮上设置有用于伸入到移动槽内的凸柱,这样便构成摆动导杆机构,摆动导杆机构在外齿轮机构的带动下即可运转。
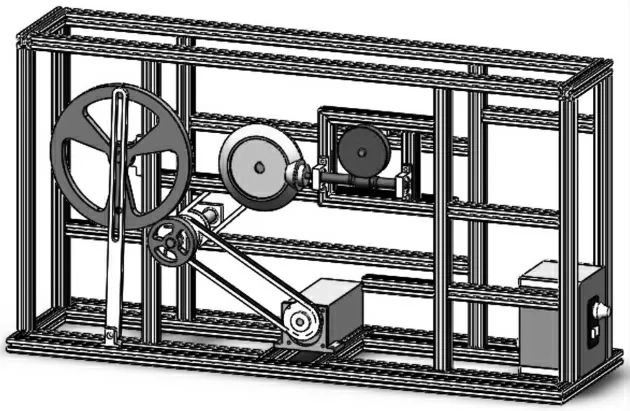
图5 拼装外齿轮机构和摆动导杆机构
如图6所示,在立体支架的另外一侧与小直齿轮同轴安装1个车轮,再利用轴承支座与刚安装好的车轮在同一水平的位置处左右两侧各固定1个车轮,3个车轮在一条水平线上并用连杆联接到一起构成平行四边形机构,在带传动机构运转时便可带动平行四边形机构一起运转。

图6 拼装平行四边形机构
如图7所示,在立体支架安装蜗轮蜗杆机构的一侧面上借助轴承支座安装1个主槽轮和1个从槽轮,并使主槽轮和从槽轮相互啮合构成马尔他槽轮机构。与主槽轮同轴安装1个V带轮,与平行四边形机构靠近马尔他槽轮机构的车轮同轴安装1个V带轮,在2个V带轮的中间位置用2个轴承支座固定1根连接轴到立体支架上,并用皮带连接同一平面内的2个V带轮,组成2组互相平行的带传动机构,这样便可使平行四边形机构运转时带动马尔他槽轮机构运转。
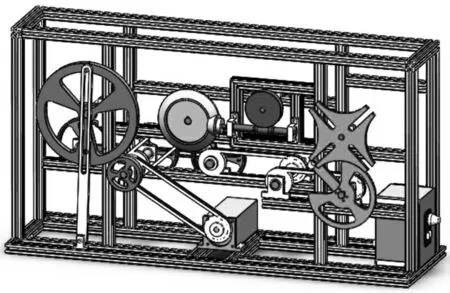
图7 拼装马尔他槽轮机构
如图8所示,在立体支架安装平行四边形的一侧与大直齿轮同轴安装1个车轮,同时在立体支架的合适位置安装1根支座导轨,支座导轨上滑动设置有2个滑块,滑块的下端固定连接有齿条,齿条的一端通过连杆与车轮连接,另外再利用轴承支座固定1个小直齿轮到立体支架上,使小直齿轮与齿条相互啮合而组成齿轮齿条机构,外齿轮机构运转即可带动齿轮齿条机构运转。
图8 拼装齿轮齿条机构
如图1所示,是在图8的机械结构基础之上增添了曲柄摇杆滑块机构。在立体支架的合适位置垂直安装1根支座导轨,并在支座导轨上安装1个滑块,另外安装2个轴承支座到立体支架上,通过1个滑块和2个轴承支座将4根连杆联接到一起,其中有1组3根连杆的一端共轴,还有1组2根连杆的一端共轴,这样便构成曲柄摇杆滑块机构。利用1个带传动机构将曲柄摇杆滑块机构与平行四边形机构相连,所以在平行四边形机构运转时曲柄摇杆滑块机构也会跟着一起运转。
上述拼装方案可以构成完整的联动系统,将电源开关打开后驱动电动机运转便可带动整个三维空间机构运转。上述方法是相对较优的拼装方案,利用此套拆装实验装置可以拼装出多种不同的三维空间机构。如果要进行拆卸实验可由教师提前拼装好一种机械结构,然后由学生来完成拆卸操作。无论是拆卸实验还是拼装实验,都需要让整个机构运转起来让学生观察机构的运动特征,以加深对机构组成的理解,达到机械创新设计的目的。
4 结论
利用所提供的零部件结合几种机械结构能创造出多种拆装方案,所有零部件采用迭加组合原理自由拆装,能充分培养学生创造性思维和实践动手能力,加深对机构组成原理与机构运动特征的理解和认识。三维空间机构是很多种机械的主体机构,在机械工程中具有广泛的应用。由于单一机构性能的局限性,以及机构运动规律和运动形式的复杂性与多样性,所以只拆装其中任意一种机械结构难以满足机械创新设计的要求,通常需要将多种机械结构进行变异或组合拆装,以获得新的机械结构和组合机构,从而达到真正意义上的机械创新设计。
