一种分布式能量供给的蛇形机器人研制
2021-01-19方子鸣陈丽梁为升范辰运陈紫延顾中炜顾文康
方子鸣,陈丽*,,梁为升,范辰运,陈紫延,顾中炜,顾文康
一种分布式能量供给的蛇形机器人研制
方子鸣1,陈丽*,1,梁为升2,范辰运1,陈紫延1,顾中炜1,顾文康1
(1.上海工程技术大学 航空运输学院,上海 201620;2.上海安邬智能科技有限公司,上海 201415)
研制了一种分布式能量供给蛇形机器人系统,该蛇形机器人系统由模块化单元组成,每个模块单元集电源、驱动器和传感器于一体,具备完全自治运动功能;蛇形机器人的头部具有无线数据接口、视觉和超声波传感器,可以实现对外数据连接和环境监测;蛇形机器人的尾部具有充电接口,可实现为各个模块和蛇头充电。蛇形机器人具备体积小、重量轻、稳定性高等优点。基于总线控制的模块化结构,可以采用分布式控制方法,实现蛇形机器人平面蜿蜒运动、抬头、翘尾、侧翻等运动形式。
蛇形机器人;分布式能量供给;自治模块;蜿蜒运动
当代机器人的研究领域已经从结构环境下的定点作业中走出来,向着航空航天、星际探索、军事侦察攻击、水下地下管道、疾病检查治疗、抢险救灾等非结构环境下的自主作业方面发展[1-2]。未来的机器人需要在人类不能或难以达到的已知或未知的环境里工作,而传统移动机器人的移动机构设计方法已不能满足机器人的作业要求,所以变革移动机器人的机构设计和运动方式,使其适应复杂的工作环境,是当前机器人研究的重要方向[3-4]。自然界中无四肢动物的运动方式引起了学者的浓厚兴趣和广泛研究,其运动方式特点是重心低、与地面有多个接触点、具有很高的运动稳定性和环境适应能力。蛇形机器人是以蛇为模型而研制的机器人,它增加了机器人的运动步态,扩大了机器人的应用领域,适合于狭长管道、松软表面、凸凹不平地面和沼泽等特殊的工作环境[5-6]。
1 蛇形机器人机构的研究现状
自从20世纪70年代开始爬行生物的力学研究,至今蛇形机器人已经成为仿生机器人研究中的一个重要分支。日本东京工业大学的Hirose[7-8]于1972年研制了第一台蛇形机器人样机,它是由电机驱动的单自由度关节串联而成,每一关节安装一对被动轮,用以改变机器人运动的纵横摩擦系数比;美国加利福尼亚工学院的Chrikjian和Burdick[9]提出了采用变几何桁架结构(Variable Geometry Truss,VGT)作为蛇形机器人的基本构架形式;日本NEC公司的Takanash[10]开发研制了一种由刚性体关节相连的蛇形机器人机构,能够实现三维空间运动,可以应用在危险情况下的探查和营救工作;德国的Karl[11]研制了一个柔性蛇形机器人GMD-snake1,每一单元由两个橡胶关节组成,且设有四组驱动装置(8个电机),它可以分别在垂直和水平方向上弯曲运动;美国卡耐基梅隆大学研制了由直流电机直接驱动的两自由度关节的蛇形机器人,美国宇航局对此机构进行了改进,研制了能实现多种运动的蛇形机器人Snakebot,希望应用在星球探索上[12]。
蛇形机器人的各种机构形式,使其可以实现多种平面运动和空间运动形式[13]。然而目前的蛇形机器人还处于实验室研究阶段,这主要是因为蛇形机器人的能源供给问题没有得到解决。现有的蛇形机器人大多采用有线连接,或者将电池安装自蛇形机器人的某一节上、采用集中供给的方式,这就导致因蛇体重量分配不均造成系统运动不协调的问题,限制了蛇形机器人的实际应用进程,基于此本论文研制了一种实现分布式能源供给蛇形机器人。
2 蛇形器人结构设计
2.1 蛇形机器人的整体结构
蛇形机器人系统由模块化单元组成,主要包括头部模块、身体模块和尾部模块三类模块设计,如图1所示。
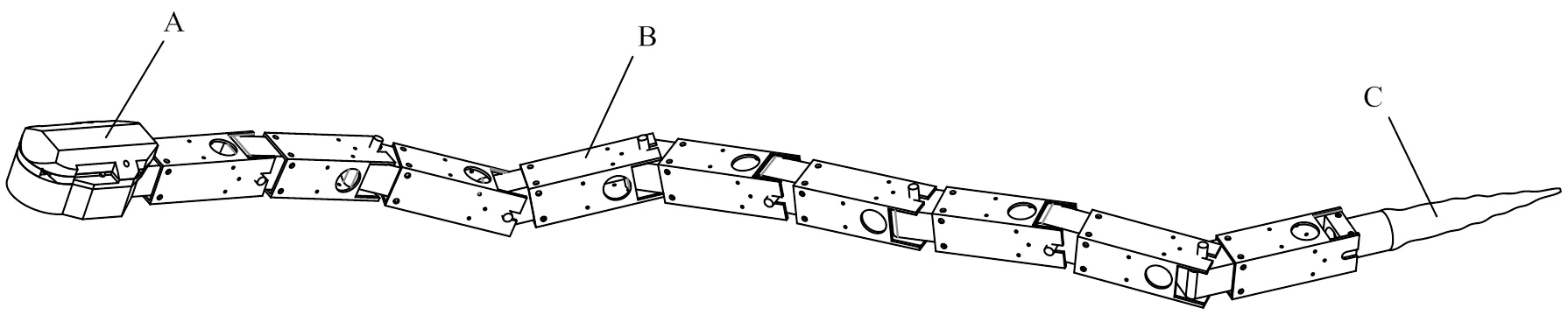
A.头部模块 B.身体模块 C.尾部模块
(1)蛇形机器人的头部具有探测和导航功能,通常配有适用于不同应用场景的传感器和性能好的单片机,用于环境识别和复杂算法设计。
(2)蛇形机器人的躯干是满足各种运动要求的运动传递机构,由多个灵活可操控的关节组成。每个关节上如果具备电机、电源、电位计和驱动器则可视为一个智能模块,多个智能模块互相组合,可重构成不同形式的蛇形机器人。
(3)蛇尾通常具有仿生外形,用于充电、走线等功能。
此外结构设计还包括具有保护和运动双重功能的仿蛇皮肤研制,以及蛇形机器人电机、控制器、传感器等零部件的设计等。
蛇形机器人的头部模块和身体模块相连,如图2所示,可以实现抬头和左右摆动。头部模块相对扁平,除仿生外形外,头部模块用于安装主控制器、传感器和各类通信接口。
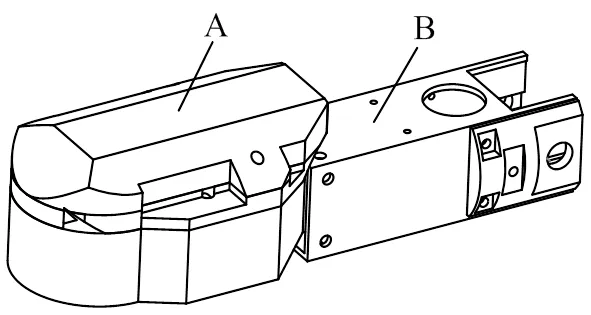
A.头部模块 B.身体模块
2.2 头部模块化结构设计
头部模块用于安放主控单元,并有视觉传感器。头部模块由上盖和下盖组成,如图3所示。上盖左右两侧设置若干设备连接出口,如无线网络接口、USB接口、HDMI接口、视觉传感器接口。下盖包括螺栓孔、走线孔和减重孔。头部模块凹槽可用于安装基于单片机设计的主控单元和树莓派,用于和外界进行数据传输和通讯;单片机系统的数据和电源线通过走线孔和后续身体模块连接。
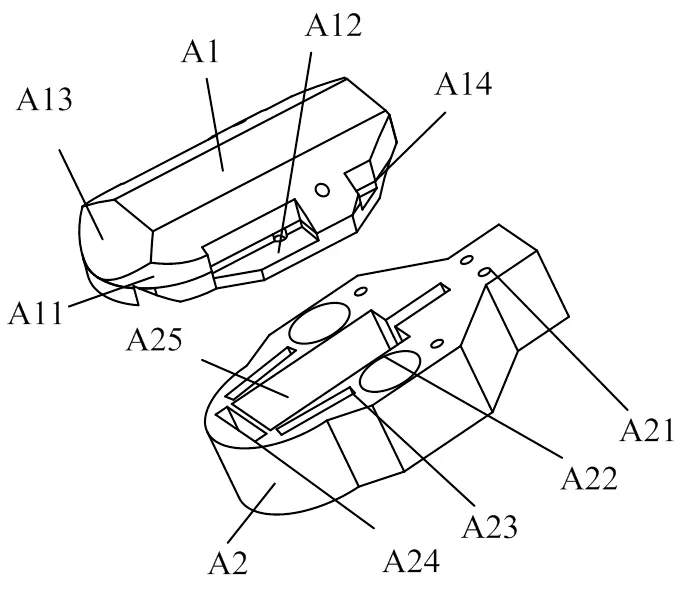
A1.上盖A11.无线网络接口A12.USB接口A13.HDMI接口 A14.视觉传感器接口A2.下盖A21.螺栓孔A22.减重孔 A23、A24.走线孔A25.凹槽
2.3 躯干模块化结构设计
身体模块为蛇的躯干,包括若干个摆转模块,身体模块正交连接,按照运动平面分为水平摆动模块和垂直摆动模块,如图4所示。每一摆转模块均包含能量供给装置和驱动装置,包括减速直流驱动电机、导线板、U形框架、可充电电池、连接板等。
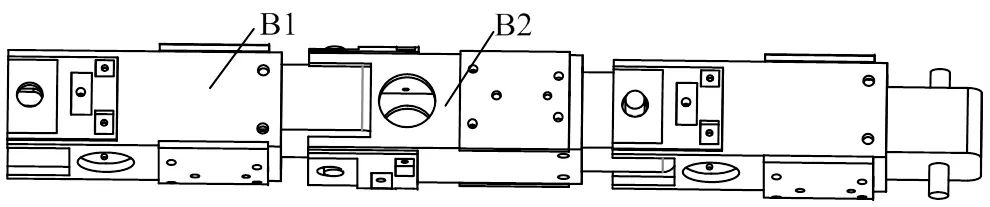
身体模块提供运动传递功能,每节模块自备可充电能源、驱动电机和驱动器,驱动器安装在蛇身体两侧,其线路由导线板内通过连接到下一模块。相邻两个身体模块通过连接板正交连接,在保护线缆的同时,还分别作为蛇形机器人和地面接触的表面。身体模块的驱动电机和充电电池模块安装在U形框架内,电机轴可连接电位计,用于检测电机的转速和转角。
2.4 尾部模块化结构设计
尾部模块设计成逐渐收缩的蛇尾状,如图5所示,具有安装螺栓和充电接口设计。通过螺栓和身体模块连接,蛇尾末端为电池的充电接口。螺管内部可以走线,为蛇形机器人各部分充电。
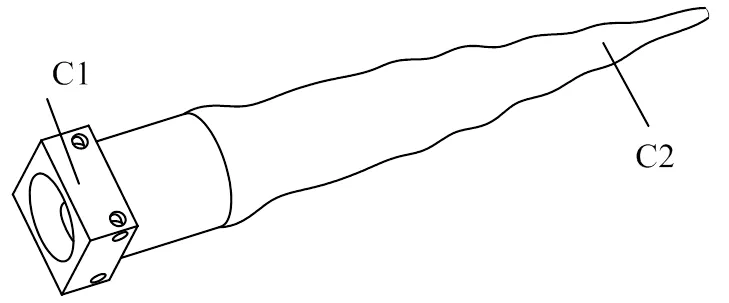
C1.安装螺栓C2.充电孔
3 自治蛇形机器人系统的研制
完成结构设计后,进行蛇形机器人的系统研制,包括设计蛇形机器人的本体机构加工、控制器设计、电机驱动器设计和能源模块设计。要达到蛇形机器人远程控制,蛇头安装视觉传感器;为了实现避障,蛇头加了超声波传感器;为了实现无线跟踪,选择便携式高容量的电池,实现分布式能量供给。
3.1 自治身体模块集成设计
蛇形机器人躯干的一个模块就是一个智能主体,均有自己的CPU和可充电电池,并能对自身的传感器和执行器进行控制。自治模块化结构设计既包括机械部分又包括电子硬件和控制软件部分,如图6所示。结构框架是蛇形机器人的主体结构,起到传递运动、保护机体、装载部件等功能。关节的运动是利用司服电机直接驱动,电机轴有电位计实现关节位置的检测,关节的每一个自由度上均需要安装位置传感器,驱动器实现关节的位置闭环运动。电源控制器实现对充电电池的充电管理。
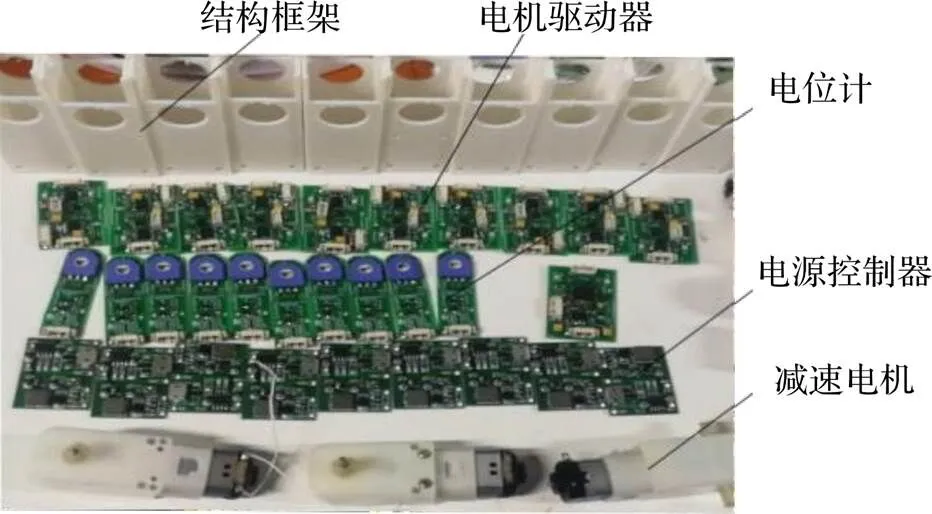
图6 蛇形机器人躯干模块的主要零部件
蛇形机器人属于模块化机器人,由大量相同模块和少量不同模块构成,具有很好的经济性,可实现多种运动形式。采用单自由度关节只能产生水平或垂直平面内的摆动,通过正交连接实现水平和垂直平面复合运动,如图7所示。模块间的连接通过减速电机实现关节的运动功能。
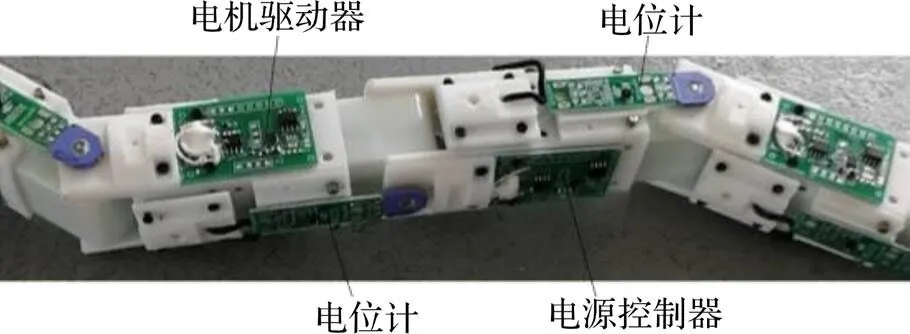
图7 蛇体模块正交连接
3.2 蛇头和蛇尾功能模块设计
蛇头具有总线控制器、蛇头降压调整器和树莓派PizeroW,具备摄像头、USB接口、HDMI接口;蛇尾具有充电接口,如图8所示。头部模块凹槽可用于安装基于单片机设计的主控单元和树莓派,并配有视觉传感器接口、无线网络接口、USB接口、HDMI接口,用于和外界进行数据传输和通讯;单片机系统的数据和电源线通过走线孔和后续身体模块连接。
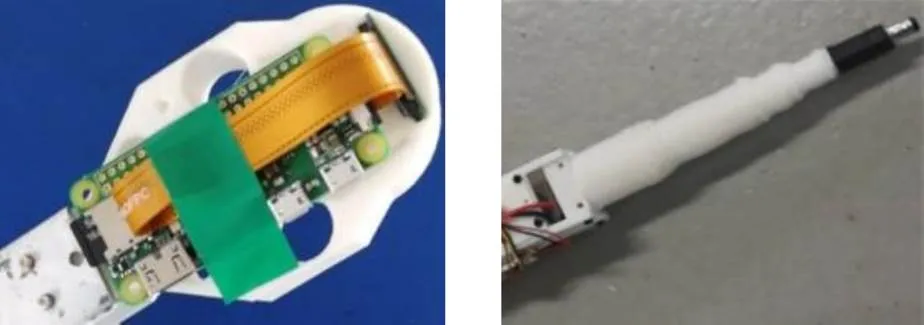
图8 蛇头、蛇尾模块的设计和组成
主控器采用stm32f302,为32位浮点单片机,可以进行控制算法的计算;驱动控制器用stm8s003,为8位单片机,除了用于进行电机转角的控制算法,还可以进行关节数据的存储。蛇头模块之间采用485总线进行通讯,蛇头降压调整器为主控器提供标准的电压。
3.3 蛇形机器人系统集成
蛇形机器人由8节组成,如图9所示,头部和尾部模块共计重877 g、长96 cm,直径4.5 cm。集成的身体模块包括结构框架、减速电机、驱动器、电位计、电源控制器和充电锂电池。自主能量供给单元包括充电电池、电源控制器和充电接口,分布式能源供给使系统小型和轻型化。充电接口在尾部提供标准5 V供电,由能源管理模块实现电机和控制板的供电,电机的输出电压范围为5~8 V。每节电池标准为450 mAh/3.7 V,假设电机平均电流为120 mA,估计供蛇形机器人连续工作1 h以上。
3.4 蛇形机器人系统试验

图9 蛇形机器人系统
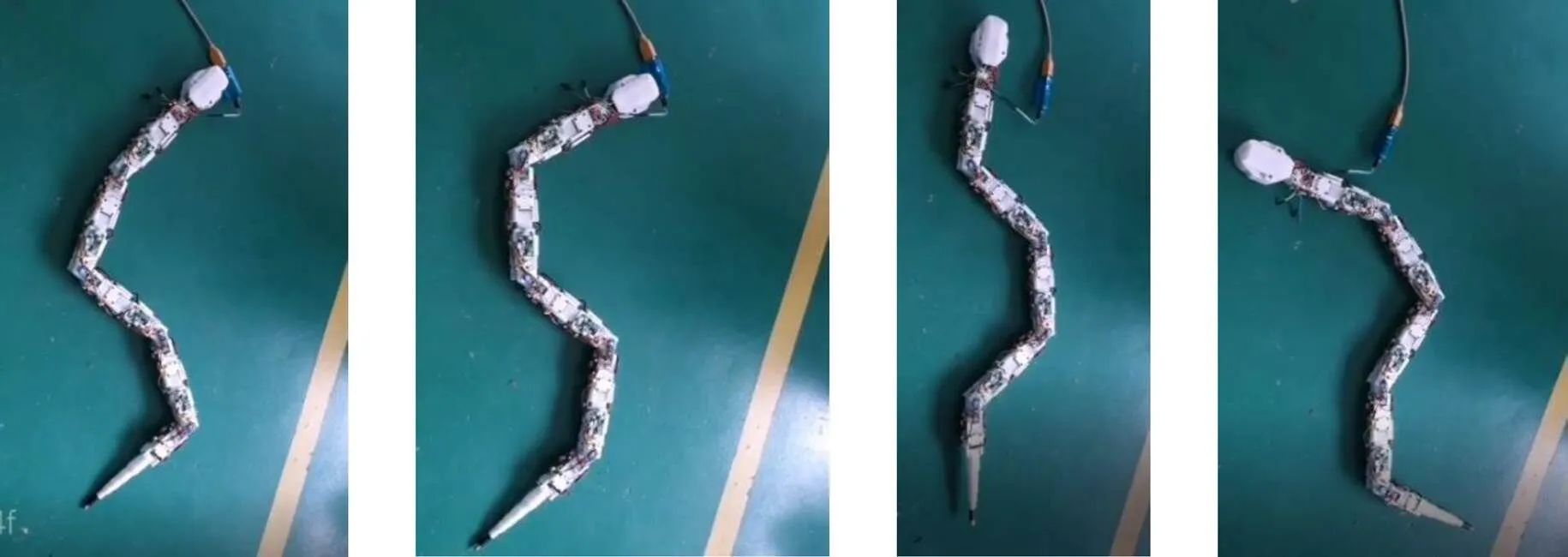
图10 运动中的蛇型机器人

图11 蛇形机器人通过无线输出图像
4 结论
该蛇形机器人是一个能源分布式供给的自治系统,具有独立自主控制的能力,其体积小、重心低,与地面有多个接触点,具有良好的地面适应性、运动稳定性和隐蔽性。同时可以实现多种运动形式,可以适应多种作业环境。但与主动轮式移动机构相比,其运动速度较慢。
蛇形机器人的大量自由度给运动规划和控制带来挑战,因此进一步应研究适用于该类系统的运动规划和控制算法。由于蛇形机器人本身具有模块化的特点,因此是其可重构的基础。进一步工作将对自治模块进行改进,实现各模块之间自动的断开或连接,以形成不同结构系统,可根据所需运动步伐改变系统结构,达到更好的适应环境的运动。
[1]Nelson W.,Cox I.. Local Path Control for an Autonomous Vehicle[J]. Proc. IEEE Conf. on Robotics and Automation,1988:1504-1510.
[2]Hirose S.,Morishima A. Design and control of a mobile robot with an articulated body[J]. Int. J. of Robotics Research,1990,9(2): 99-114.
[3]张祺,姚志刚,陈奇. 基于虚拟样机的仿鲹科机器鱼游动姿态仿真研究[J]. 机械,2019,46(1):74-78.
[4]张燕超,崔吉. 全方位移动机器人动力学研究[J]. 机械,2019,46(3):18-23.
[5]王智锋,马书根,王越超,等. 基于能量的蛇形机器人蜿蜒运动控制方法的仿真与实验研究[J]. 自动化学报2011,37(5):604-605.
[6]卢振利,李斌. 蛇形机器人蜿蜒游动性能动力学仿真分析[J]. 机器人,2015,37(67):48-753
[7]Hirose S. Biologically Inspired Robots (Snake-like Locomotor and Manipulator[M]. Oxford University Press,1993.
[8]Hirose S. The Biomechanisms of Snakes[M]. Robotics Research In Hirose-Yoned Laboratory,1997.
[9]Ostrowski J.,Burdick J. The geometric mechanics of undulatory robotic locomotion [J]. Int. J. of Robotics Research,1998,17(7):683-701.
[10]Paljug E.,Ohm,T.,Hayati S. The JPL serpentine robot:a 12 DOF system for inspection[J]. Proc. IEEE Int. Conf. on Robotics and Automation,1995:3143-3148.
[11] Paap K L , Dehlwisch M , Klaassen B . GMD-Snake: A Semi-Autonomous Snake-like Robot[M]. Distributed Autonomous Robotic Systems 2. Springer Japan, 1996.
[12] Whittaker, William L. Limbless Locomotion : Learning to Crawl with a Snake Robot[J]. Dissertation Abstracts International, Volume: 60-01, Section: B, page: 0253.;Chair: William L. Whitt,1997,4(4):3001-3006.
[13]苏中,张双彪,李兴城. 蛇形机器人的研究与发展综述[J]. 中国机械工程,2015,26(3):414-456.
Development of a Snake Robot with Distributed Energy Supply
FANG Ziming1,CHEN Li1,LIANG Weisheng2,FAN Chenyun1,CHEN Ziyan1,GU Zhongwei1,GU Wenkang1
( 1.School of Air Transportation, Shanghai University of Engineering Science, Shanghai 201620, China; 2.Shanghai An Wu Intelligent Technology Co., Ltd., Shanghai 201415, China )
In this paper, an autonomous snake robot system with distributed energy supply is developed. The snake robot system is composed of modular units. Each module unit integrates power, driver and sensor, and has full autonomous motion function. The snake robot head has wireless data interface, visual and ultrasonic sensors for external data connection and environmental monitoring; the charging port at the rear allows charging of individual modules and snake heads. Snake robot has the advantages of small size, light weight and high stability. The distributed control method is used to realize the plane serpenoid motion and special movement forms such as head lifting, tail lifting and side turning of the snake robot.
snake robot;distributed energy supply;autonomous module;serpenoid motion
TP242
A
10.3969/j.issn.1006-0316.2020.11.004
1006-0316 (2020) 11-0024-06
2019-12-30
上海市大学生创新项目(CS1908002)
方子鸣(1999-),男,河南信阳人,主要研究方向为机械设计。*通讯作者:陈丽(1975-),女,黑龙江宁安人,博士,教授,主要研究方向为机器人控制,E-mail:cl200432@tom.com。
