钻井平台拖航及装船过程中拖轮的使用
2021-01-19宋炳贵大连港引航站
宋炳贵 大连港引航站
1.拖航及协助装船引航方案
通常情况下,引航员所引领的船舶具备主机和舵机,能够驱动船舶前进和后退、维持和改变船舶航向。而钻井平台不具备主机和舵机,并且水线上下结构特殊,不具备一般船体水线下的流线型,无动力、无保向性,拖带困难。因此,要完成拖航和装船关键就在于拖轮的配置和使用。
1.1 任务概述
钻井平台“爱莎”计划于 2020 年8月29日从大连中远海运重工有限公司(以下简称中远)厂区拖航至小三山岛以西 1.2 海里处装船点进行装船作业。作业时半潜船“祥瑞口”抛单锚,“爱莎”平台在港作拖船的协助下装至半潜船,绑扎加固后,开航驶往阿联酋阿布扎比港。
该平台系为国外客户建造的海上石油钻井平台(以下简称平台),无自航能力。大连港引航站引航员负责中远调头区到装船点的拖带作业,装船作业由半潜船船长和港口指导船长负责,引航员和拖轮提供协助。
1.2 船舶资料
平台“爱莎”基本信息:总长,95.76米、型长,74.09米、型宽,69.83米、装船重量,12360.2吨、拖航吃水,5.13米 。
半潜船“祥瑞口”基本信息:总长216.70米、两柱间长212.13米、型宽43.00米、满载吃水9.68米、甲板尺度177.6米×43.0米。
1.3 航线设计
从中远临时航道进入油轮锚地北部,然后经油轮锚地东北部朝东南方向前进,从H3和H5号灯浮标之间斜穿甘井子航道进入第一货轮锚地北部,经第一货轮锚地东北部至该锚地东南角,然后直接对着装船点前进。航程总计约8海里。拖航时间预计3.5个小时。可据当时情况,选择更趋合理安全的通航路径。
1.4 作业条件
(1)风力:不得超过5级(10米/秒)。
(2)浪高:不得超过1米,应没有涌浪。
(3)能见度:应大于1.5海里,且只能在白天进行。
(4)富裕水深:拖航所经水域最小水深为5.4米,基本无需乘潮,但为更加保险考虑,可选择通过临时航道时乘潮水位大于1.5米为佳。
(5)申请海事局VTS给予必要的航路保障协助。
1.5 拖轮及引航员配置
(1)拖航和装船时需用4艘拖轮配合作业,单船马力大于4200匹。暂定为连港8(5200匹)、9(5200匹)、28(5500匹)、33(6000匹)。拖航当日,保证拖轮数量不变,但拖轮马力可据情况进行适度调整。
(2)引航站安排至少2名适任引航员上平台指挥,其中1名具有高级引航员资质,负责拖航和协助装船过程的全程拖轮指挥。
1.6 准备工作
(1)船厂应提前确认气象、海况等条件,具备条件方可实施作业。
(2)平台在拖航前应使其稳性满足规范要求,系拖轮缆绳的装置处于完好工作状态,不影响拖轮发挥正常作用。
(3)所用拖轮应满足规范要求,证书齐全,人员完备,处于正常工作状态。
(4)作业计划和方案在实施前应得到主管机关的许可。
(5)拖航前拖航组织单位应组织召开船前会,研究拖航方案,协调各有关部门(人员)的分工合作,确保拖航和装船全过程的安全顺利。
(6)船方在左舷或右舷放置符合SOLAS有关规定的引航员登轮装置,以便于引航员安全地登离轮。
(7)平台上需提供引航仪器所必须的电源及插座。
1.7 注意事项
(1)厂方或平台方应安排足够的熟练人员上平台负责系解拖轮和岸上缆绳、以及装船带缆工作,并应指定专人与引航员在一起负责对系缆人员进行指挥。
(2)引航员与拖轮之间应保持VHF或其他手段的通讯联络畅通。
(3)拖航过程中平台引航员应指定一艘拖轮负责协助守听交管频道,注意VTS及其他航行船舶的通航和避碰信息,保持高度戒备和正规了望。
(4)如遇突风或大雾,立即就近选择安全水域进行规避,充分利用拖轮进行协助,决不盲目蛮干。
(5)如遇异常或特殊情况当日无法装船,则由船厂方评估后选择海上漂航或返至船厂等安全措施。
(6)本方案涉及到船舶操纵部分应得到被引领船船长的同意。
(7)无论怎样,现场操作引航员有权根据当时现场实际情况,采取最适合当时环境和情况的安全措施。
2.拖航
2.1 操作过程
2020年8月29日0700时,本人随同高级引航员孙师傅一同登上停靠在中远船厂的钻井平台“爱莎”轮,同船厂、平台、半潜驳各方人员现场再次确认拖航及装船方案,明确各自职责。随后攀爬至直升飞机起落平台,准备好便携式导航仪、开启VHF守听交管及后续工作频道,等待调头区接船。
现场发现,虽然船厂引水提前按引航站提供的拖轮布置图带妥拖轮,但是由于平台结构特殊,不仅所有拖轮无法顶推,而且作为主拖的“连港28”“连港9”倒拖过程中无法与平台保持一线,拖航时需要向外张开一定角度,整体呈“外八字”,因此拖航中主拖要不间断地施于向内的力,才能保持拖轮的运动方向与平台艏尾线平行,维持拖带姿势的稳定。否则随着平台的移动两条主拖的张开角度会越来越大,直至“连港28”、平台、“连港9”三者成一线,平台将无法按照预定方向移动,拖带任务难以继续。
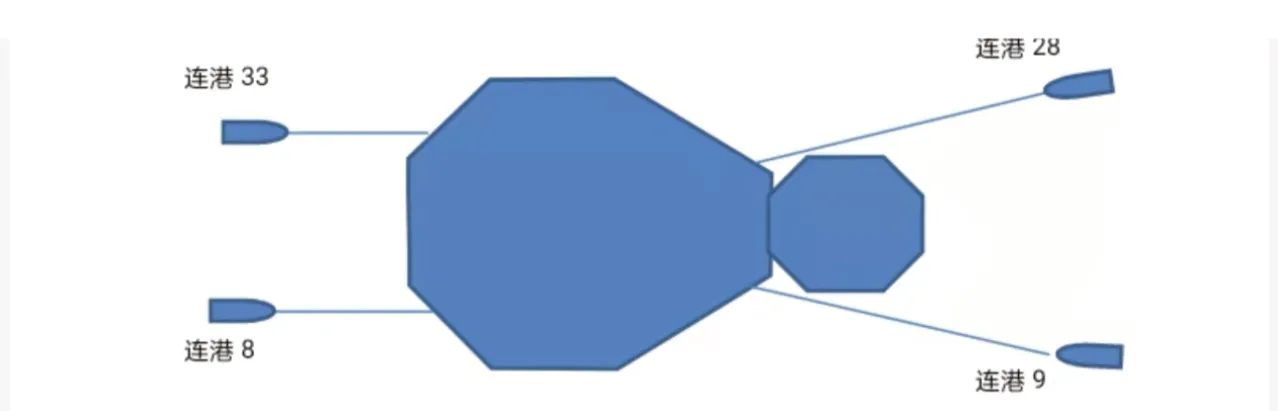
拖带过程中,主拖的拖力将会造成平台产生三种运动,即偏转、横移、纵向运动。在拖轮的作用下,平台的这三种运动形式,将会以复合的形式出现,因此拖航中要给与足够的重视。两条主拖拖轮之所以选择倒拖的形式,一是因为港作拖轮船尾无拖缆,如果平台出缆,则缆绳长度无法随时调整,不利于应对突发情况;二是后续装船操作的需要,利于拖轮驾驶员观察现场情况,保障拖轮安全。
0750时平台抵达调头区,双方交接结束。指挥四条拖轮协助平台转向、控制好位置和艏向,命令四条拖轮放缆。“连港9”和“连港28”放缆至100米,“连港8”和“连港33”放缆50米。因“连港28”马力较大,所以命令 “连港9”全速倒,“连港28”在全速和中速之间随时调整,尽量保持两拖轮拖力相同,维持平台航向稳定。随着拖力的逐步加大,平台开始缓缓移动,直至加速到3节左右。拖航过程中通过不断调整拖轮的角度和力量,平台始终维持在计划航线上,速度保持在2.5至3节之间。
1100时平台抵达装船点附近,半潜驳反馈当时流速小于0.3节,满足装船的作业要求。于是指挥四条拖轮开始对平台调头,1130时调头结束,平台与半潜驳平行、艏向相反、横距约150米左右。
2.2 遇到的问题及解决方法
2.2.1 两主拖拖力无法持续相同
两条主拖马力不同,一开始以5200匹的“连港9”全速倒拖为参照,调整5500匹的“连港28”的拖力,本以为是顺理成章的事,可实际上却完全相反,两条拖轮都以全速倒拖的时候,马力大一些的“连港28”的拖力竟然小于“连港9”。最后,不得不以“连港28”为参照,通过调整“连港9”来获得两拖力相对的平衡。之所以会出现这种情况,主要是因为以下几点原因。一是拖轮服役年限不同,主机工况不同,“连港28”下水服役年限远超“连港9”,马力上就会打折扣;二是操作人员存在差别,不同的人操作同一条拖轮输出的马力也不尽相同,同时,为保持拖缆与平台间角度的稳定,倒拖过程中,拖轮始终要输出一个适当的横移的力,这个力的生成方法和大小与拖轮驾驶员有着最直接的关系,也就会存在差异化,自然对纵向拖力有着不同的消耗;三是两条拖缆张开角度不尽相同,每个拖轮驾驶员都有自己的关于安全余量的判断、也有着不同的压力承受能力,这些就会体现在缆绳张开角度的大小上,不同的张开角度自然就会长生不同的纵向拖力。
2.2.2 航向无法稳定
实际操作中,虽然尽量协调两主拖的拖力,但偏航不可避免且时有发生,为克服偏转需要使用平台尾部拖轮进行纠正。在引领常规的船舶时,如果拖轮无法顶推,我们会用相反方向的拖轮倒拖用以达到想要的效果。因此,最初“连港8”和“连港33”垂直于平台放缆,跟随平台横向移动,保持随时倒拖的垂直状态,但实际操作发现效果不佳,甚至事与愿违。几次的航向调整过程尾部拖轮都没能做出预期的效果,最后不得不通过大幅度降低艏部拖力来维持航向的稳定。
通过观察发现,尾部拖轮无法时刻保持与平台垂直,大部分时间是保持45度张角的状态,而对于型长和型宽接近相等的平台来说,张角45度的拖力对平台运动产生的影响具有不确定性。于是,立刻改变尾部拖轮状态,保持与大船一线、吊于尾部用以调整平台航向。如果平台向右偏转,则用左后的拖轮倒车;如果平台向左偏转,则用右后的拖轮倒车。这种方法对尾部拖轮要求低、操作简单、效果明显、消除了不确定性。看似降低了平台的拖航速度,但是却节约了纠正偏航和主动转向的时间,同时减轻了操作人员的压力。
3.装船
调整四条拖轮的位置和缆绳长度,“连港28”和“连港33”与平台呈45度交角,放缆约50米,负责前后和向内移动;“连港8”和“连港9”在平台外档保持垂直,放缆约100米,负责控制横移速度。当平台被拖至半潜船左舷(这次装船为平台左舷靠近大船左舷进行)约50米左右时,装船作业正式开始,船方负责平台装船的总管指挥带缆艇从半潜船艏部给平台的尾部先送上第一根缆绳,然后带缆艇到半潜船艉部给平台的艏部送上第二根缆绳。当艏尾各自带好两根缆绳后,内舷的拖轮被解除,只留外舷两条拖轮用以控制拢速,依靠收绞缆绳慢慢拉动平台,最后定位,半潜驳排水上浮,1500时完成平台装船的全部操作。

装船作业,引航员虽然只负责调整平台位置,但操作过程依旧要求细心、稳妥、缓慢、可控。平台所使用的四条拖轮,“连港8”和“连港9”是新造的具有破冰能力的远洋拖带拖轮,干舷高、船体机构强、自重大、动作缓慢,因此将它们两安排在相对轻松的外舷;“连港33”是马力最大的一条拖轮,将它安排在迎流的一端,是最关键、最重要的位置,负责克服流水对平台的冲击,保证平台前后位置,同时还要提供平台向内的力,直到平台和半潜驳间的缆绳带上,其缆绳长短要合适,太短则输出力量不足,太长则空间受限、有安全风险;“连港28”的主要作用就是配合“连港33”保持平台与半潜驳始终平行,同时兼顾控制平台的纵向位置,相对与迎流端的拖轮来说不需要太大的马力输出。
4.结论
在引航工作中,引航员与拖轮驾驶员的接触是最频繁的,在引航操纵中,注意观察拖轮动作的快慢,和用车的特点;理解引航员口令的程度,反映的快慢。做到心中有数,针对不同的拖轮、不同的驾驶人员、不同的操纵特点,发出不同的指令,使其配合更加顺畅协调。
引航人员对自己发出的每一个操纵指令,必须验证其效果,无论是对大船还是对拖轮。未达到预期效果的要及时进行修正,不能把指令发出就万事大吉。引航操纵中,机会稍纵即逝,不及时验证和修正,随时会造成操纵上的被动,导致危险的发生。

引航员在引航过程中,要保障被引船的安全,更不能忽视协助拖轮的安全。在使用拖轮时,应随时关注拖轮的船位、动态,要给拖轮预留出安全的操纵空间。听取拖轮驾驶人员对有碍拖轮安全操纵的情况报告,及时做出调整,拖轮只有在安全的操纵环境下,才能及时完成各种操纵动作,才能给予被引船提供强有力的协助。
对于一些不常见的作业,引航员更要克服惯性思维,勤于观察,及时调整。对于新问题,如果还依靠过去的惯性思维,就难以解决。这时我们就要换一个角度去思考遇到的问题,仔细观察现场的作业情况,分析与以往有哪些的不同,做出及时合理的调整,保证引航作业的安全。