水下无人航行器集群搜潜效能建模分析
2021-01-19卢清亮王雪仁郭峰
卢清亮,王雪仁,郭峰
(中国人民解放军92578 部队,北京 100161)
0 引 言
随着军事科技的迅猛发展,现代战争正加快向信息化和智能化发展,其中一个明显标志是多种无人装备列装[1]。在水下作战空间,水下无人航行器受到各国关注,逐渐发展成为一支独特的作战力量。集群协同是无人装备的重要使用方式[2],水下无人航行器集群搜潜可有效支撑体系反潜能力提升。本文首先对水下无人航行器执行集群搜潜任务进行分析,提出多种可能的组网模式、搜索路径;基于装备效能评估一般流程[3],制定作战海域、海洋环境、双方企图等背景条件,之后假定双方的部分目标特性,利用经典声学传播损失模型和声呐探测模型,计算得到不同航速下的探测效能;基于效能仿真评估系统,采用蒙特卡洛法大样本计算,对水下无人航行器集群搜潜效能进行建模分析,给出了不同使用策略下的搜潜效能。
1 集群搜潜任务分析
1.1 组网模式
无人集群通过多个无人个体协作完成既定任务,具有智能化、高效能和低成本的特点,可根据任务设定选择多种组网模式。假定某集群搜潜任务共派遣8 个水下无人航行器,每个水下无人航行器最多可对邻近2 个进行通信,即可组成节点数为8、每个节点最多2 条连接边的集群网络。该网络可以是“环”型组网、“队”型组网、“团”型组网、“串”型组网等类型,如图1 所示。
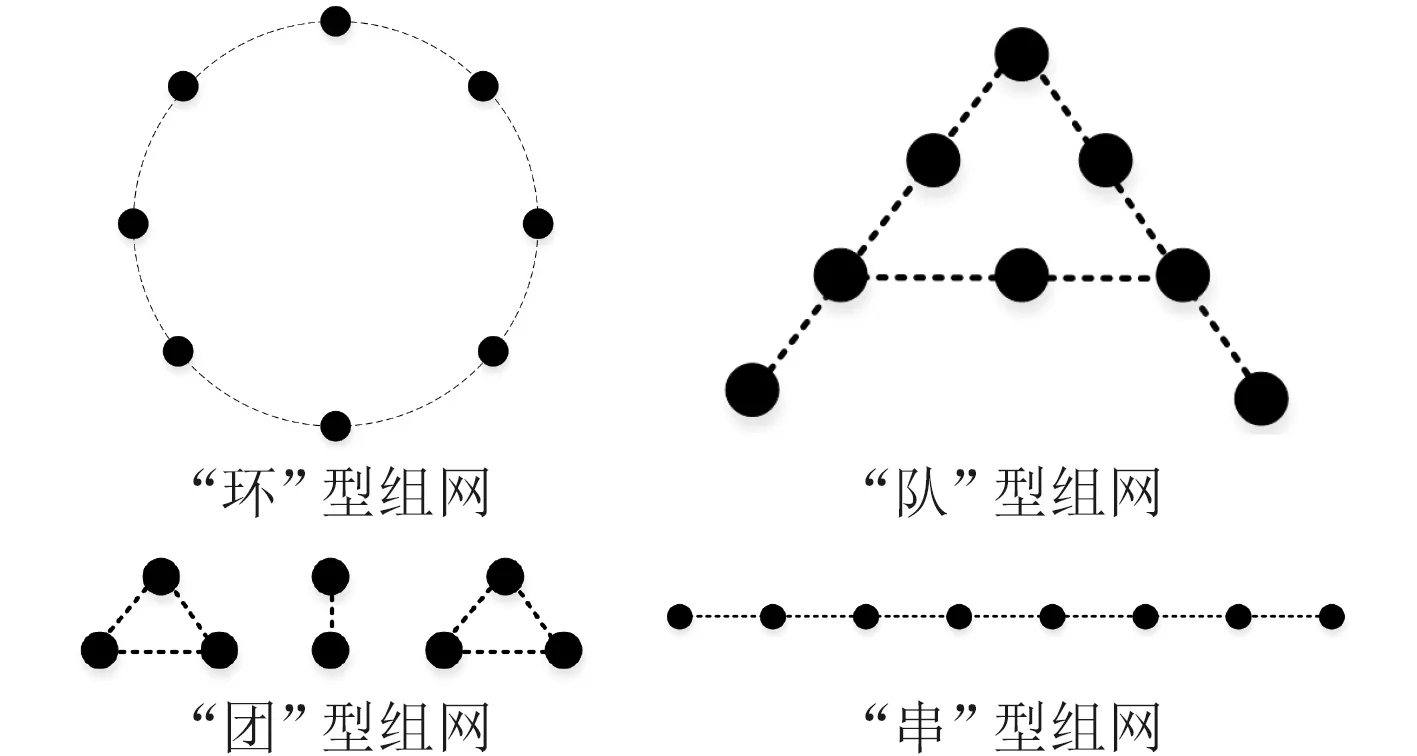
图 1 水下无人航行器搜潜路径示意图Fig. 1Schematic diagram of UUV networking
水下无人航行器按照设定的组网模式执行搜索任务,其中每个网络节点与邻近的网络节点距离需保持在可通信范围内。
1.2 搜索路径
由于潜艇的高度隐蔽性,水下无人航行器一般设置在固定区域或航线内,通过机动形成搜索幕或搜索带,用以发现和封堵潜艇。在搜索区域一定情况下,搜索路径存在多种形式(见图2),分别列举了“弓”字形、“回”字形、“之”字形3 种搜索路线。
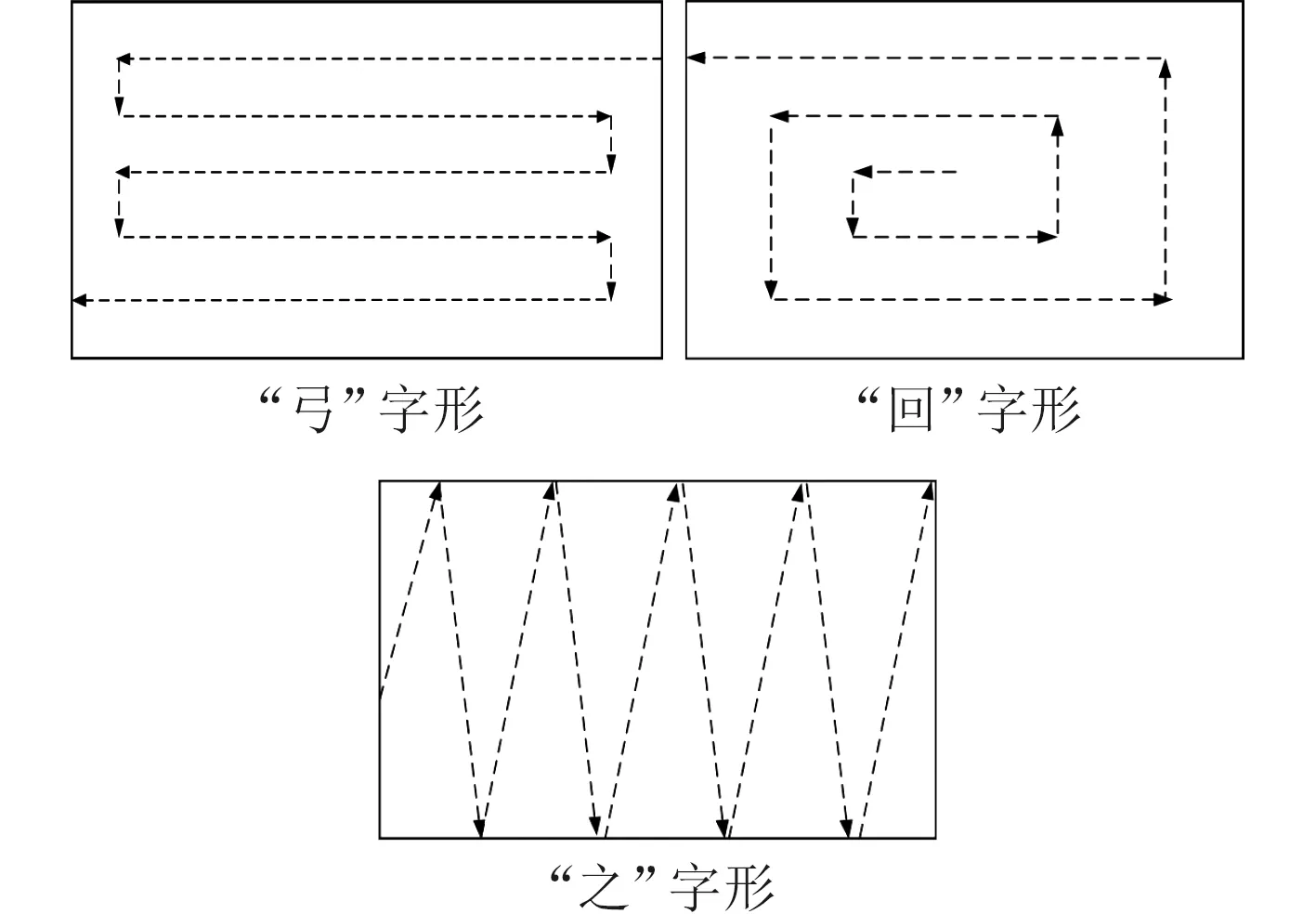
图 2 水下无人航行器组网示意图Fig. 2Schematic diagram of UUV searching submarine path
2 集群搜潜效能评估流程
水下无人航行器集群搜潜效能评估结论应在确定的作战场景及装备体系背景下得出[4]。因此,为达到效能评估目的,应充分发挥动态模拟仿真方法优势,建立较精细的水下装备隐身模型、探测模型及目标特征传播模型。对天气模型、指挥关系模型、行为模型等应以接近真实作战态势为目标,在保证结果可信度的前提下,采用尽可能简化的数学模型,以减小建模难度与仿真系统运行负荷。根据作战效能评估的典型流程,水下无人航行器集群搜潜效能评估流程如图3所示。
评估步骤主要有:
1)首先根据效能评估目的,设定作战背景、双方企图、双方兵力构成、兵力部署态势、海战场环境、双方行动方案等内容;
2)根据装备实体功能性能、行为逻辑等参数和装备体系指挥关系、通信关系等作战构成,建立平台组件、传感器组件、通信组件、目标特性组件、行为组件等多个组件,再由不同组件构成不同的装备实体和战场关系,建立作战仿真模型;
3)基于效能仿真评估系统开展大样本仿真计算,提取仿真结果,给出评估结论。
3 集群搜潜想定
3.1 任务背景
蓝方派遣1 艘潜艇向红方关键海域机动,意图对红方实施抵近侦察。获取蓝方意图后,红方派遣若干水下无人航行器,赴指定海域执行区域搜潜任务,双方部署态势如图4 所示。任务海域海底地形平坦,不考虑底质变化、表面风浪对声传播的影响,声速剖面如图5 所示。红方水下无人航行器发现蓝方潜艇后,即通知相邻友方兵力,搜潜任务成功。若任务全程未发现蓝方潜艇,即搜潜任务失败。
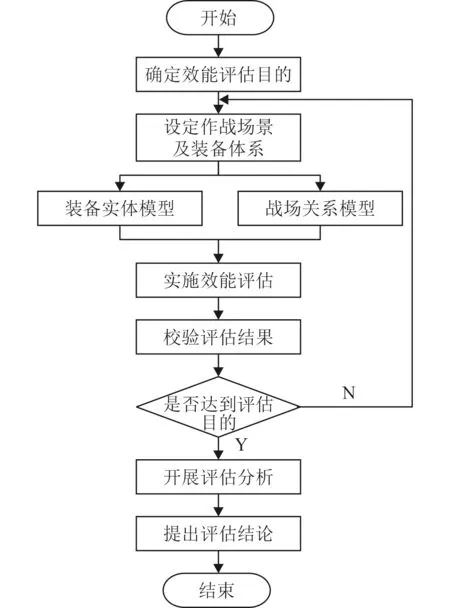
图 3 水下无人航行器集群搜潜效能评估流程Fig. 3Evaluation process of UUV cluster search efficiency
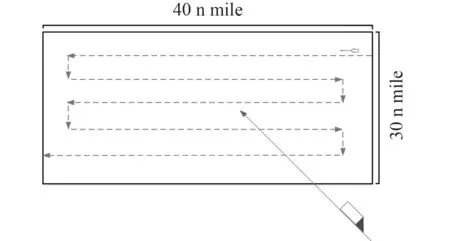
图 4 双方部署态势Fig. 4Deployment situation of both sides
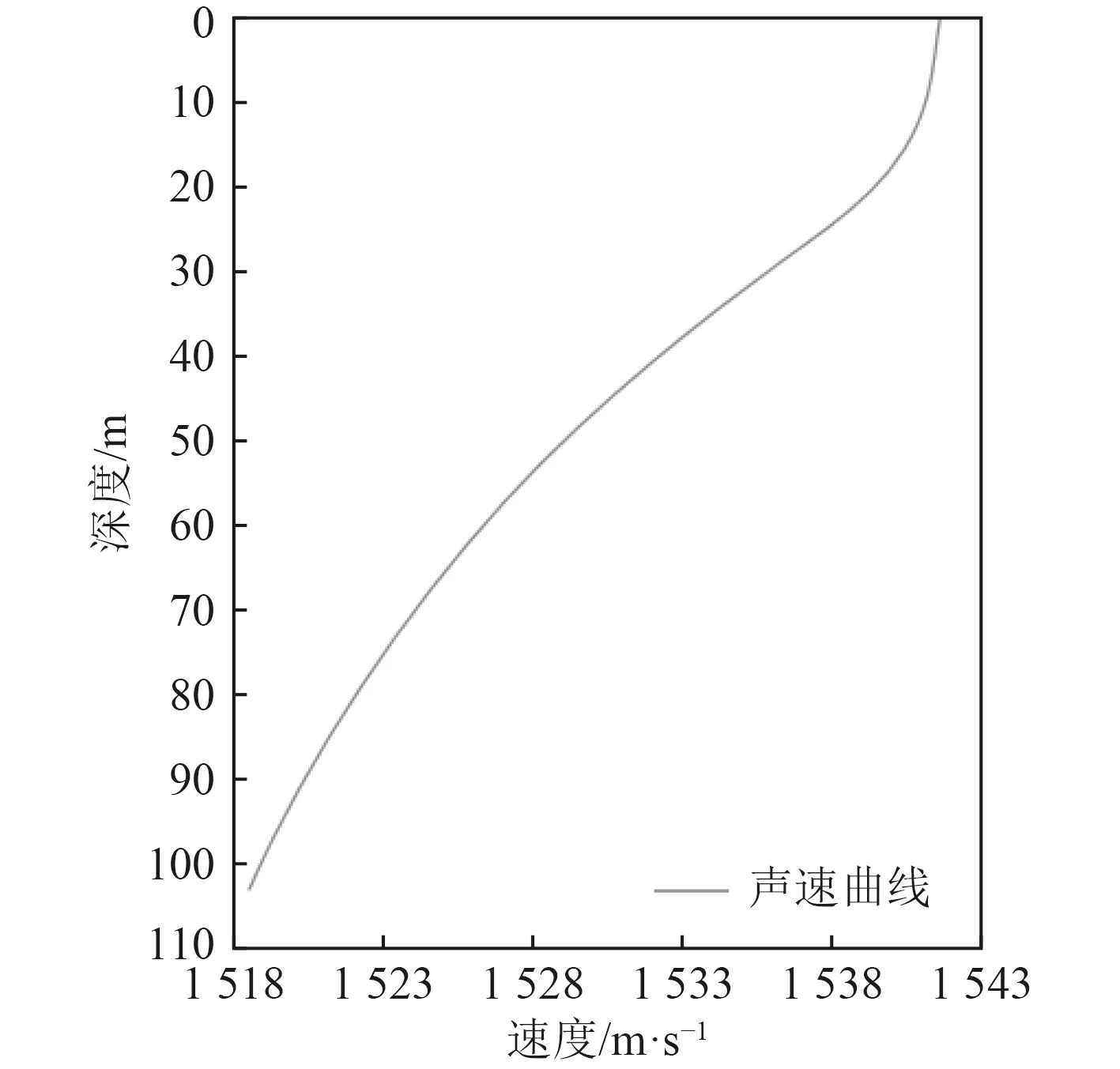
图 5 任务海域声速剖面Fig. 5Sound velocity profile in the mission area
3.2 装备性能参数假设
水下无人航行器单平台搜潜主要影响因素有机动能力、隐身能力、探测能力和通信能力。其中,机动能力需考虑续航力、航速、潜深等;隐身能力主要考虑声隐身性能,包括辐射噪声[5]和声目标强度;探测能力主要考虑发射声源级、探测频率、检测阈、接收阵增益等;通信能力主要考虑水声通信距离。假定任务全程双方均使用被动声呐,构成集群的每个水下无人航行器性能相同。假设水下无人航行器航速为3~5 kn,蓝方潜艇航速为8 kn,蓝方潜艇被动声呐性能优于水下无人航行器,水下无人航行器辐射噪声性能优于蓝方潜艇。
在设定的海洋背景下,利用经典声学传播损失模型和声呐探测模型计算各兵力探测效能。结果显示,在各个方向解析得到的声传播损失量基本近似,任选一个方向,获得不同航速下各兵力探测概率与距离的关系,如图6 所示。

图 6 不同航速下水下无人航行器和蓝方潜艇的探测概率Fig. 6Detection probability of UUV and submarine at different speeds
3.3 实验工况
考虑不同组网模型、搜索路径、兵力数量、航速等实验变量,设定22 种仿真实验工况见表1。
3.4 搜潜效能指标设计
以不同使用策略时水下无人航行器对蓝方潜艇的首先发现概率为搜潜效能指标,计算方法为:

4 仿真结果分析
基于效能仿真评估系统,对22 种实验工况进行了建模与仿真计算。以8 节点“环”形组网模式为例,建立不同搜索路径的仿真模型如图7 所示。
通过仿真计算,获得不同实验工况下水下无人航行器对蓝方潜艇的首先发现概率,如表2 所示。
根据仿真计算结果,分析如下:
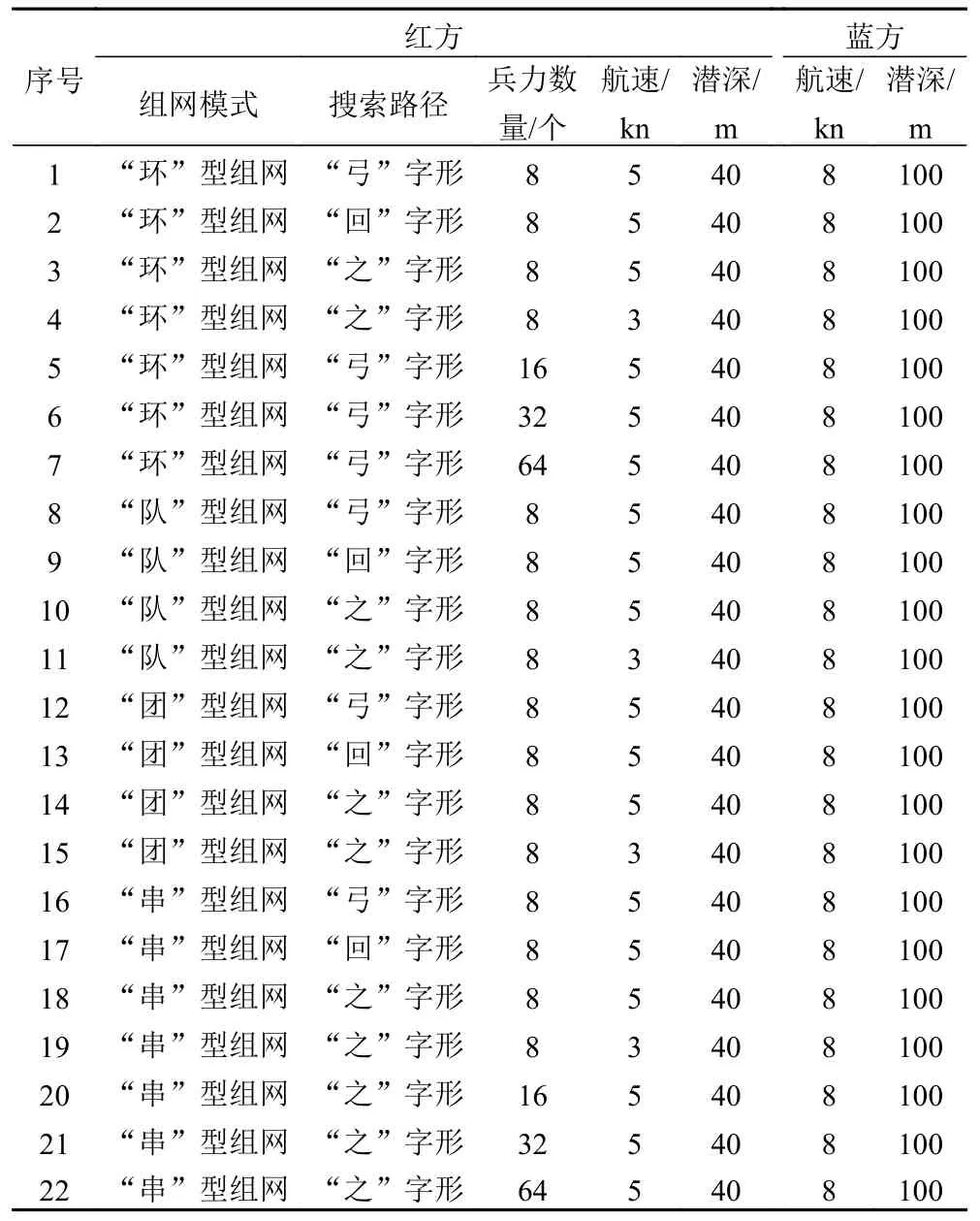
表 1 水下无人航行器集群搜潜仿真实验工况Tab. 1Simulation test conditions of UUV cluster search
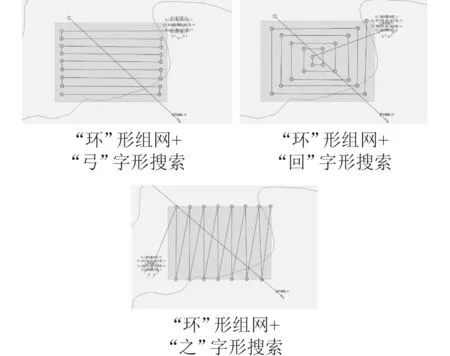
图 7 “环”形组网模式下不同搜索路径仿真模型Fig. 7Simulation model of different search paths in“ring” networking mode
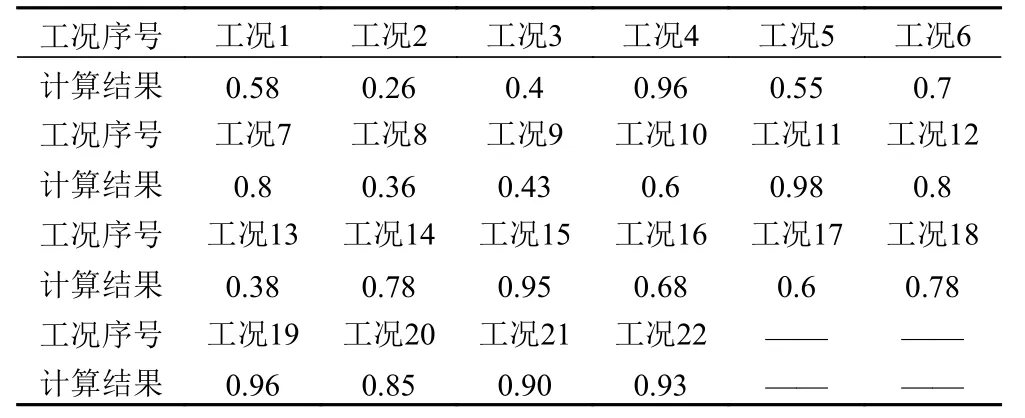
表 2 不同工况仿真计算结果Tab. 2Simulation results of different working conditions
1)总体分析
在设定背景的22 种实验工况中,平均搜潜效能达到了0.69,即水下无人航行器对蓝方潜艇的首先发现概率达到了0.69。其中,水下无人航行器采用“团”型组网模式、航速3 kn、“之”字形搜潜路径时效能最优,为0.98;水下无人航行器采用“团”型组网模式、航速5 kn、“之”字形搜潜路径时效能最优,为0.98;水下无人航行器采用“环”型组网模式和“回”字形搜潜路径时效能最差,为0.26。
2)不同组网模式搜潜效能分析
当水下无人航行器数量为8 个、航速为5 kn 时:
“环”型组网模式平均搜潜效能为0.41,其中“弓”字形搜潜效能最优,“回”字形搜潜效能良好,“之”字形搜潜效能较差;
“队”型组网模式平均搜潜效能为0.46,其中“弓”字形搜潜效能较差,“回”字形搜潜效能良好,“之”字形搜潜效能最优;
“团”型组网模式平均搜潜效能为0.65,其中“弓”字形搜潜效能最优,“回”字形搜潜效能较差,“之”字形搜潜效能良好;
“串”型组网模式平均搜潜效能为0.69,其中“弓”字形搜潜效能良好,“回”字形搜潜效能较差,“之”字形搜潜效能最优;
可以看出,在设定背景下,4 种组网模式种,“串”型组网模式下的搜潜效能最高;不同搜潜模式下,采用不同搜索路径表现的搜潜效能差别较大。
3)不同搜潜路径效能分析
当水下无人航行器数量为8 个、航速为5 kn 时:
“弓”字形搜潜路径平均搜潜效能为0.61,其中“环”型组网模式搜潜效能较差,“队”型组网模式搜潜效能最差,“团”型组网模式搜潜效能最优,“串”型组网模式搜潜效能较优;
“回”字形搜潜路径平均搜潜效能为0.42,其中“环”型组网模式搜潜效能最差,“队”型组网模式搜潜效能较优,“团”型组网模式搜潜效能较差,“串”型组网模式搜潜效能最优;
“之”字形搜潜路径平均搜潜效能为0.64,其中“环”型组网模式搜潜效能最差,“队”型组网模式搜潜效能较优,“团”型和“串”型组网模式搜潜效能最优。
4)搜潜效能与水下无人航行器数量的关系
根据计算结果,得到“环”型和“串”行组网模式以5 kn 航速进行搜索时,搜潜效能随着水下无人航行器数量变化关系如图8 所示。
可以看出,“环”型或“串”型组网模式下,搜潜效能随着水下无人航行器数量的增加而增加,增加速率随数量的增加而降低。
5)不同搜潜速度效能分析
由仿真计算结果可以看出,当水下无人航行器的数量、组网模式和搜索路径相同时,3 kn 航速的搜潜效能高于5 kn 航速。其中,“环”型组网模式搜潜效能提升140%,“队”型组网模式搜潜效能提升63.3%,“团”型组网模式搜潜效能提升21.8%,“串”型组网模式搜潜效能提升23.1%。
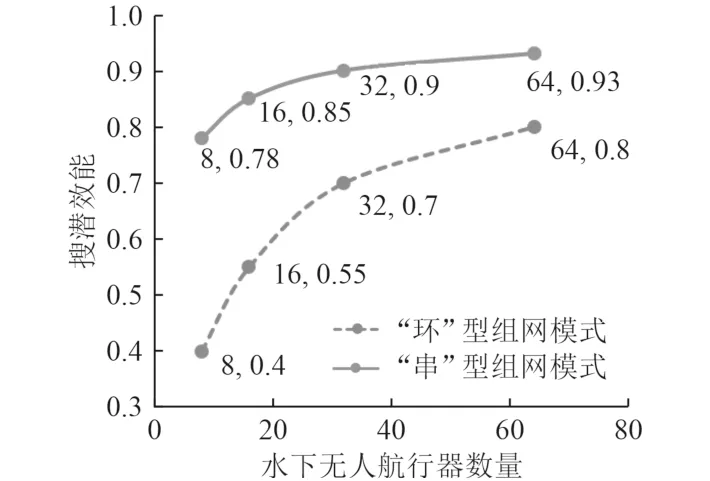
图 8 水下无人航行器数量Fig. 8Relationship between submarine search efficiency and number of UUV
5 结 语
本文基于效能仿真评估系统,考虑水下无人航行器组网模式、搜索路径、数量、航速等参数变化,对提出的22 种实验工况进行了建模与仿真,对计算结果开展了多维度分析,得到以下结论:
1)在设定背景下,提出的22 种搜索方案的平均搜潜效能达到了0.69,水下无人航行器集群是一种有效的搜潜方式;
2)组网模式的优劣性和搜索路径的优劣性需要在一定背景下进行判断,根据实验结果,两项参数的优劣性没有固定的规律;
3)选择有利探测航速时,虽然一定时间内航迹覆盖范围减小,最终的搜潜效能不一定降低。在本文的设定背景下,由于单个水下无人航行器的探测效能增加,速度降低时搜潜效能反而增加。
本文设定了固定的海洋背景环境和战术行动方案,对实际环境进行简化。从仿真过程与计算结果可以看出,水下无人航行器集群战术选择具有多样性,指挥员在制度水下无人航行器集群使用策略时,需要根据作战海域环境、双方装备性能、作战目的等多种因素进行综合决策。
