大翼展混合驱动无人水下航行器总体设计及性能分析
2021-01-19凌宏杰张学丰孙玉山王志东张贝
凌宏杰,张学丰,孙玉山,王志东,张贝
(1. 哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001;2. 江苏科技大学 海洋装备研究院,江苏 镇江 212003)
0 引 言
水下无人航行器是海洋资源开发与探测的主要工具之一。HUG(Hybrid Underwater Glider)是一种融合了传统AUV(Autonomous Underwater Vehicle)和AUG(Autonomous Underwater Glider)驱动方式的新型水下无人航行器[1-2]。该类型航行器拥有AUV 和AUG的优点。滑翔模式使其具有大尺度、长航程作业的特点。动力推进模式使其具有高度灵活性和抵抗外界复杂环境载荷的能力。
型线优化、多学科设计优化与模块化设计是水下航行器构型所采用的主流设计方法[3-5]。国内外滑翔机外形设计以3 种典型线型(Spray,Slocum,Sea glider)为主,在母型基础上优化与改进,以满足设计要求,并取得优良的水动力性能[6]。诸敏等[7]多参数优化了水下滑翔机的外形;张奇峰等[8]采用数值方法分析了水下滑翔机的运动性能。陈刚[9]设计水下滑翔机的浮力调节机构,并采用数值方法分析了滑翔机的运动性能。
国内,2007 年,刘锟等首次设计出了新型混合驱动型水下航行器HUG。之后沈阳自动化研究所和西北工业大学等单位开展了HUG 理论研究。近些年,国内出现了飞翼式等新型水下航行器,该类航行器具有飞翼式结构,可实现较大升阻比,具有优良的滑翔性能[10]。
为实现长航程、复杂海洋环境中航向高保持能力,本文提出一种高升阻比、分布式推进的混合驱动水下无人航行器。基于模块化设计思想,采用仿生构型完成了大翼展推进与滑翔混合驱动航行器的总体设计,该航行器具有大翼展高升阻比特性,减小滑翔角,满足长航程要求。在翼梢下方分布2 个主推进器,主要实现航行器的航向高度保持能力,在外界海流环境较为恶劣时,启动推进模式,冲破紊流区域。
1 水下航行器设计目标及方法
1.1 设计目标
大翼展混合驱动水下无人航行器(简称HUG)设计目标:
1)具备3 种运动模式:滑翔模式,推进模式,滑翔与推进混合模式;
2)最大工作水深:≥1 000 m;
3)设计滑翔速度:≥0.7 kn;
4)最大推进速度:≥4 kn。
该HUG 的优势特色:
1)大翼展、高升阻比、减小航向角,实现大滑翔比;
2)翼梢处对称的主推进器布局,实现低功耗航向高保持能力;
3)混合驱动可实现多模态切换,实现多种功能需求。
该HUG 可实现以下功能:
1)可以根据实际的需求,在滑翔机上搭载具体的传感器,使得滑翔机在航行过程中,监测并反馈已获取海洋环境参数(如温跃层参数、盐层参数等);
2)可精准定位到指定的目标区域,误差小,并对该区域进行实时监测及反馈;
3)可实现GPS 精准定位,在滑翔机上装配有卫星通信终端和无线网络,能够在全球范围内与岸基监控中心实现数据通信;
4)可以在预定的区域范围内,完成空间螺旋运动,且螺旋的半径可根据具体的情况设定。
1.2 设计思路
以设计目标为约束条件,水下无人航行器采用模块化设计法开展外形、推进单元、浮力调节单元、俯仰调节单元,控制单元、抛载单元的总体设计,对其静力学、结构力学、水动力和运动性能进行数值计算与分析,经过反复迭代后,确定水下无人航行器定型设计。HUG 总体设计流程见图1。
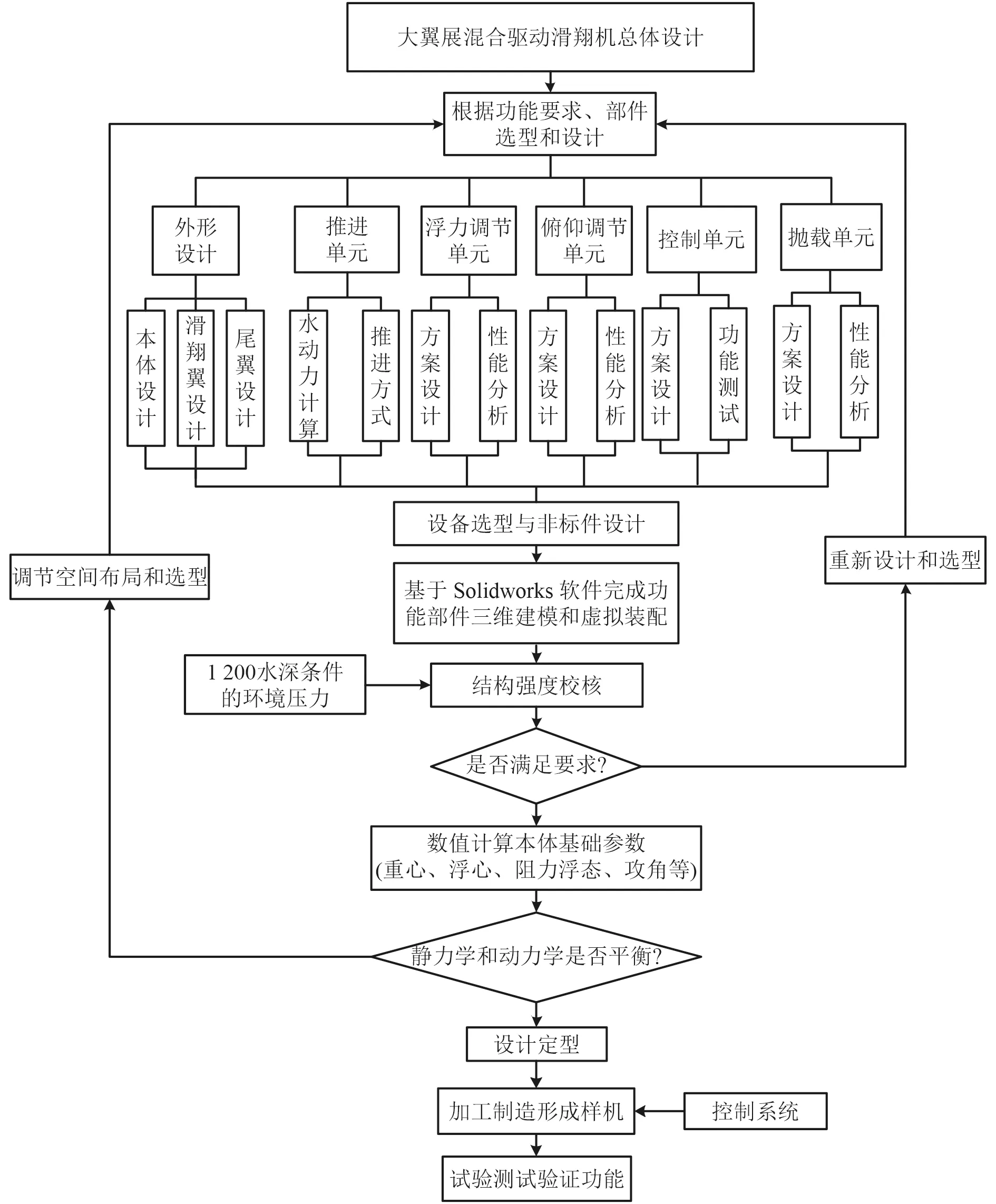
图 1 总体设计流程图Fig. 1Overall design flow chart
2 HUG 系统总体设计
HUG 本体内部系统较为复杂,且功能多样,由各种功能和构型各异的功能部件组合而成,以满足功能需求,主要有浮力调节单元、俯仰姿态调节单元、控制系统单元3 个基础的单元,在翼展上装有推进单元、尾舱尾端装有抛载模块等核心单元。各单元在HUG 中的分布见图2。
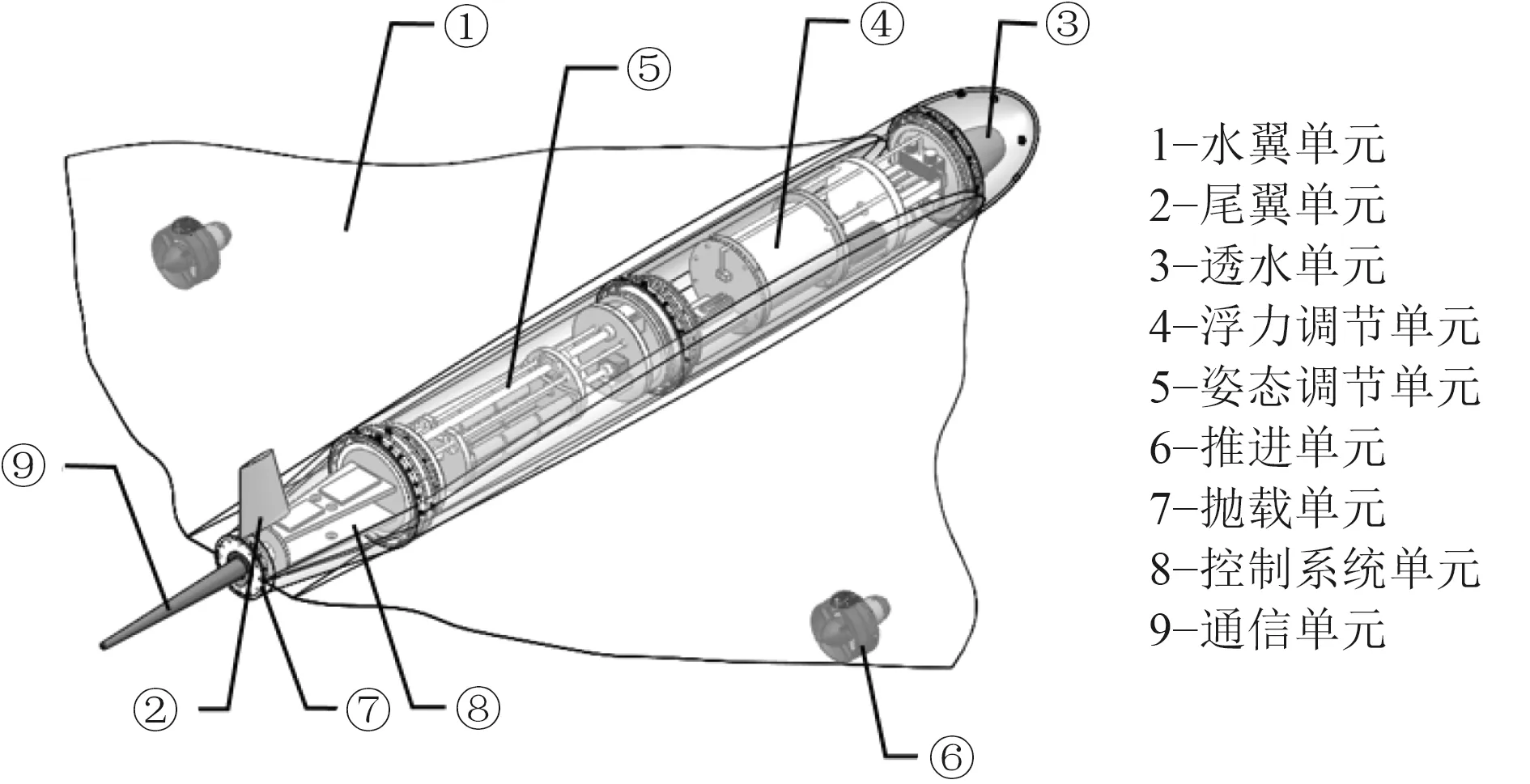
图 2 HUG 单元模块分布图Fig. 2HUG unit module distribution map
2.1 主体设计
HUG 的水动力外形主要由主体、水翼和尾翼等组成。HUG 主体采用Spray 线型,其中平行中体长度为600 mm,以此获得较高的水动力特性。滑翔机设计时,内部舱容是水下滑翔机性能优异的先决条件,综合考虑内部结构的尺寸和整体结构重量等方面因素,最终选取回转体直径为182 mm。采用半椭圆形首部,其中长半轴180 mm,短半轴90 mm。尾部长度为400 mm,包角为15°,如表1 所示。设计总长1855 mm,HUG 外形见图3。

表 1 HUG 主体主尺度表Tab. 1 HUG main body scale table

图 3 HUG 主体外形图Fig. 3HUG main body outline drawing
2.2 水翼设计
为获得高升阻比翼型结构,基于仿生学原理,仿生海洋生物三角形鳐鱼大翼展构型,如图4 所示。测量活体鳐鱼胸鳍外形轮廓尺寸,建立该HUG 的水翼物理模型,按照相似原则,对翼型尺度的缩放,确定水翼外形轮廓曲线如图5 所示。综合考虑翼的主尺度和重量等因素,翼型剖面选用NACA0006,完成仿生大翼展构型设计。
2.3 尾翼设计
通过增设尾翼提高HUG 运动稳定性,翼型选用NACA0012 可提供较大操纵力矩。其结构参数包括翼根弦长Cr、翼端弦长Ct、半展长b/2、翼型和后掠角γ,尾翼面积采用经验公式(1)估算,计算所得面积需额外增加50%[11]。

式中:S 为尾翼面积;D 为航行器直径;L 为航行器总长;B 为航行器宽度。设计出的尾翼面积为0.07 m2,尾翼各结构参数如表2 所示。尾翼结构如图6 所示,尾翼外形如图7 所示。
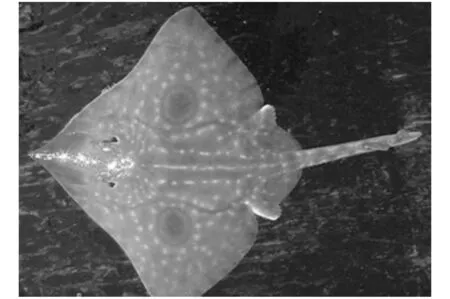
图 4 三角形鳐鱼图Fig. 4Triangle squid illustration
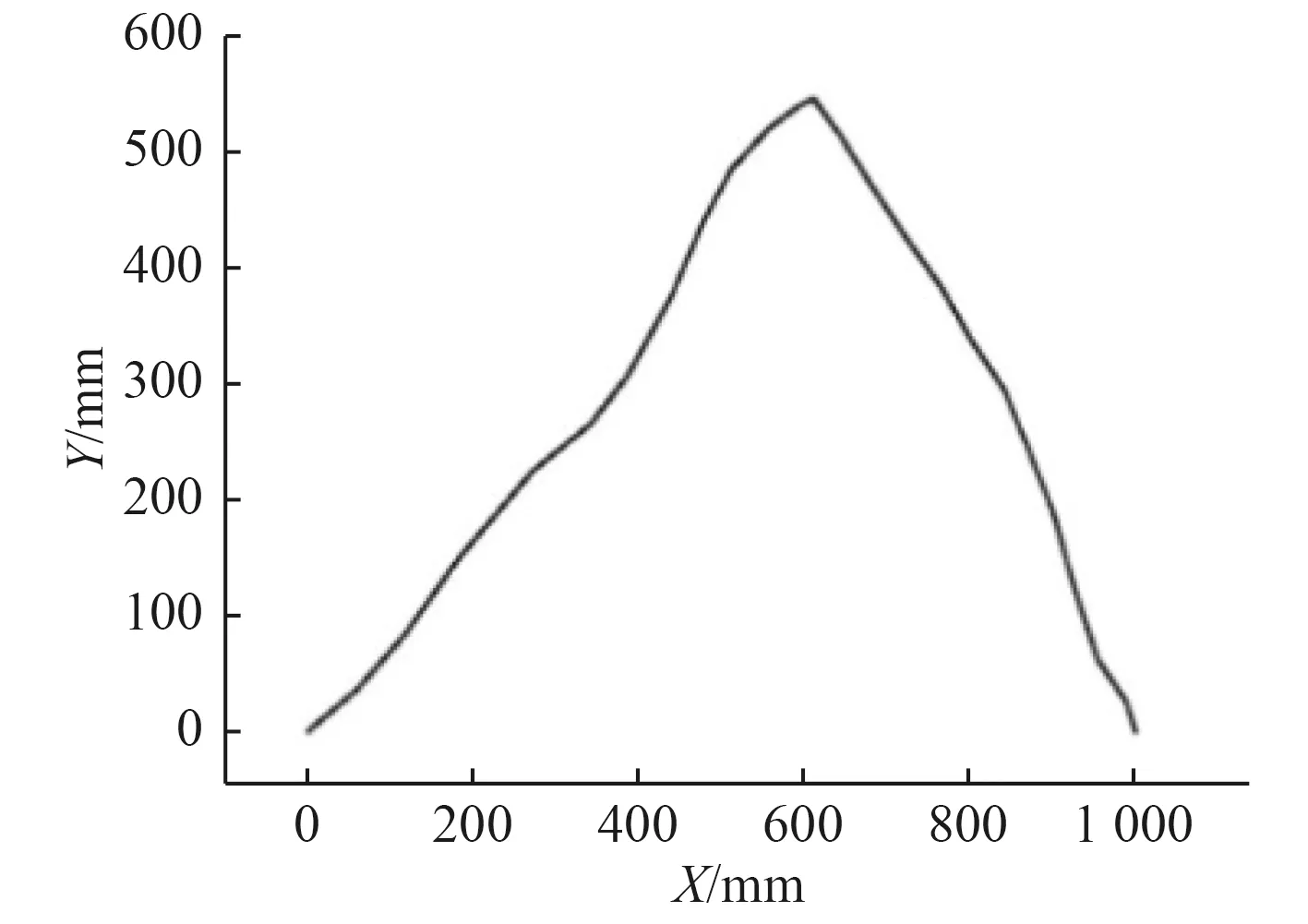
图 5 水翼外形轮廓曲线图Fig. 5Hydrofoil profile curve

表 2 尾翼参数表Tab. 2 Tail parameter table
图 6 尾翼结构图Fig. 6Tail structure diagram
图 7 尾翼外形图Fig. 7Tail outline drawing
2.4 浮力调节单元设计
浮力调节单元是HUG 滑翔模式上浮和下潜的动力来源。浮力调节单元采用“恒力闭环控制方式”。该单元采用力传感器作为恒力控制的输入参数,实现内油箱处于恒压力状态,保证油箱内无隙漏。位移传感器精确测量油箱内油量变化,实现内外油箱内油量的精确控制。该系统易于搭建,精度高、可靠性好。浮力调节单元如图8 所示。
图 8 浮力调节单元图Fig. 8Buoyancy regulation unit diagram
2.5HUG 姿态调节单元设计
姿态调节单元是HUG 的滑翔上浮和下潜姿态调节的核心单元,由于航行器采用了分布式推进,可以实现航向的实时控制,无需采用重心横向偏移实现航行器横滚姿态调节,因此该系统实现俯仰调节,以位移传感器精确控制质量块沿航行器长度方向运动的位置。以陀螺反馈航行器姿态角实现调节重块位置,HUG保持在最优姿态角航行,并实现快速上浮、下潜运动。
本文姿态调节单元采用电池包作为调节质量块,如图9 所示。该设计形式使航行器内部结构紧凑,占用空间少。
2.6 推进系统设计
为实现HUG 航向高保持性和实时响应,提高HUG 对外界环境的适应能力,提高自主灵活性以及抗干扰性,在翼梢处对称布置推进器,增加转首力臂,实现推进器在低功耗下获得较大转首力矩,实现航行的高保持性,为突破海洋环境中尺度涡(相对于航行器而言为斜向流)奠定基础。根据航行器的水动力阻力计算结果为依据,推进模式最大航速可达4 kn,可有效应对海洋中的紊流环境,提高生存能力。推进器基本参数如表3 所示。采用推进模式。可实现近海岸浅水区的布防回收和水平运动目标追踪,配合浮力驱动系统可完成强流区的剖面滑翔运动。推进器侧视图和分布图见图10 和图11。
图 9 姿态调节系统图Fig. 9Attitude adjustment system diagram

表 3 T200 参数表Tab. 3 T200 parameter table

图 10 推进器侧视图Fig. 10Propeller side view

图 11 推进器分布图Fig. 11Propeller distribution map
2.7 抛载单元设计
为了提高HUG 遇到紧急状况的存活率,设计抛载单元。当传感器自检到滑翔机内部进水、电量低、姿态调节功能失效等危险状态时,滑翔机自动抛弃悬挂的抛载单元,使滑翔机快速得到浮力,在重浮力差的驱动下,使航行器实现快速自动上浮。
在尾部端盖外部悬挂半圆环状的抛载铁块,端盖内部开有凹槽,凹槽内镶嵌电磁铁,电磁铁与控制系统相连,这样实现了电磁铁对外部的抛载模块的吸附。正常工作状态下,吸附铁块,当遇到紧急状态时,铁块自动脱落,航行器自主上浮。该抛载模块设计简单,安装方便。相比传统的抛载,避免了在端盖处开口带来的密封性能变弱的问题,并且抛载铁块藏身于端盖面后部,对水动力性能影响很小。抛载单元侧视图见图12。
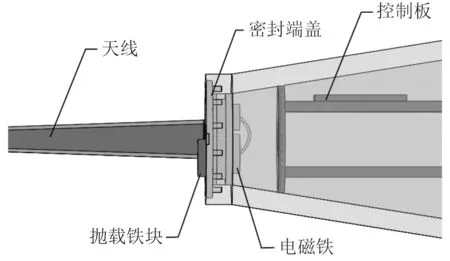
图 12 抛载单元图Fig. 12Discharge unit diagram
3 静力学计算与分析
在进行静力学分析计算时,采用右手惯性坐标系,将滑翔机的浮力中心作为坐标系原点,规定沿HUG 向首部方向为X 正轴,沿HUG 横向向左为Y 正轴,垂直本体向上Z 正轴。图13 为所建立的坐标系图。航行器主体为圆柱形,首部为半椭圆形,尾部为圆台形,舱与舱之间采用平板端盖密封。针对航行器开展静力学计算并配平,使航行器重心与浮心相重合达到水平状态。通过液压油与电池块的移动可以计算出该航行器的重心调节范围,如表4 所示。
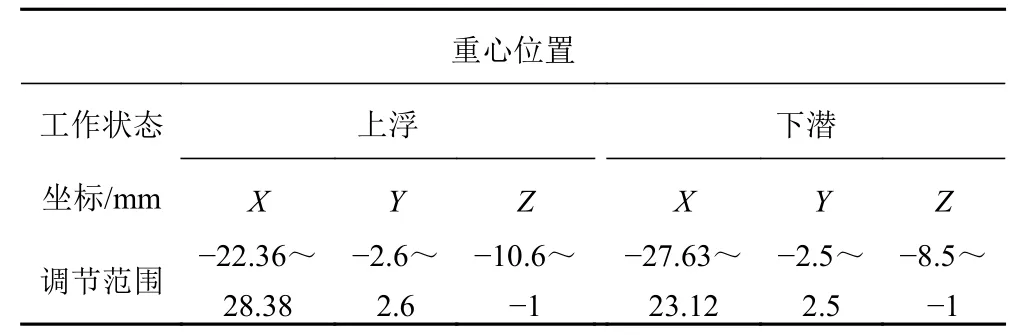
表 4 重心调节范围表Tab. 4 Center of gravity adjustment range
4 HUG 系统中承压壳体强度及稳定性计算分析
水下航行器壳体制造通常选择金属材料(如不锈钢、铝合金、钛合金等)和工程塑料(如亚克力,pvc塑料)等,因耐压壳体长时间海水中工作,对其耐腐蚀性要求高。综合考虑材料强度、抗腐蚀性能、工作下潜水深及加工工艺等因素,耐压壳体最终选用高强度铝合金6 061-T6 材料,并且在表面采用钝化处理防腐。高强度铝合金6 061-T6 材料属性见表5。

表 5 铝合金6 061-T6 材料属性Tab. 5 Aluminum alloy 6 061-T6 material properties
航行器设计最大下潜深度为1 000 m,耐压壳体需承载压力为10 MPa。为提高航行器故障下生存几率和降低加工难度,耐压壳体采用单层耐压壳体,并对各个单元进行模块化分舱设计,各舱相互独立,从而提高水下滑翔机的存活率,为了便于舱与舱之间的连接,各舱首尾部均有台阶结构。舱与舱的通信采用水密接插件。该HUG 壳体结构水动力性能较好,表面过渡平滑,无较大尺寸突变。主要包括首部椭圆状导流透水罩,中部2 个舱室的圆柱状壳体,尾部15°半包角的圆台状结构、尾部天线壳体组成。各舱尺寸见表6。HUG 外壳装配结果如图14 所示。
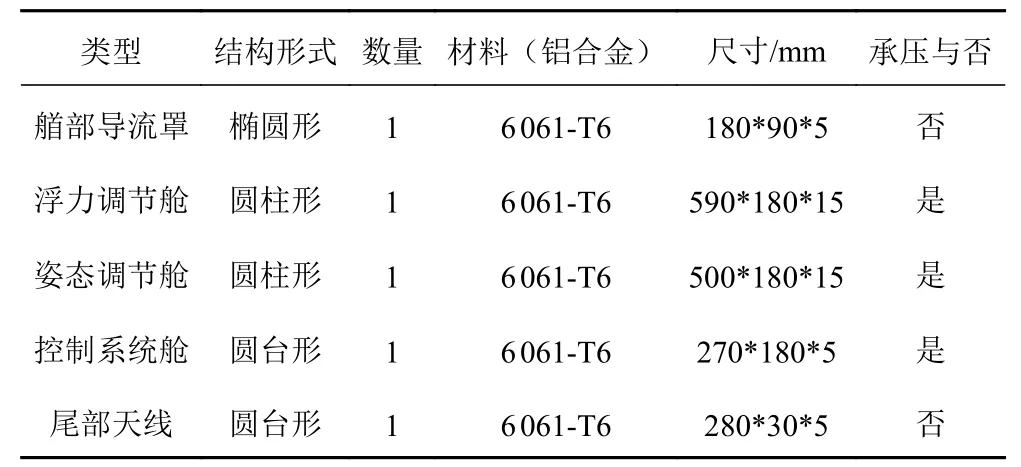
表 6 各舱尺寸表Tab. 6 Cabin size table
浮力调节舱、姿态调节舱与控制舱为承压舱,工作水深1 000 m,在静应力分析时,对耐压舱外表面需施加10 MPa 的压强,各舱室的有限元网格尺寸分别设定为5 mm、8 mm 和6 mm,并且对首部和尾部一些结构紧凑的地方进行局部加密。最终,3 个舱室的网格数量分别是10 万、9 万和6 万,如图15 所示。

图 14 HUG 外壳装配图Fig. 14HUG shell assembly drawing
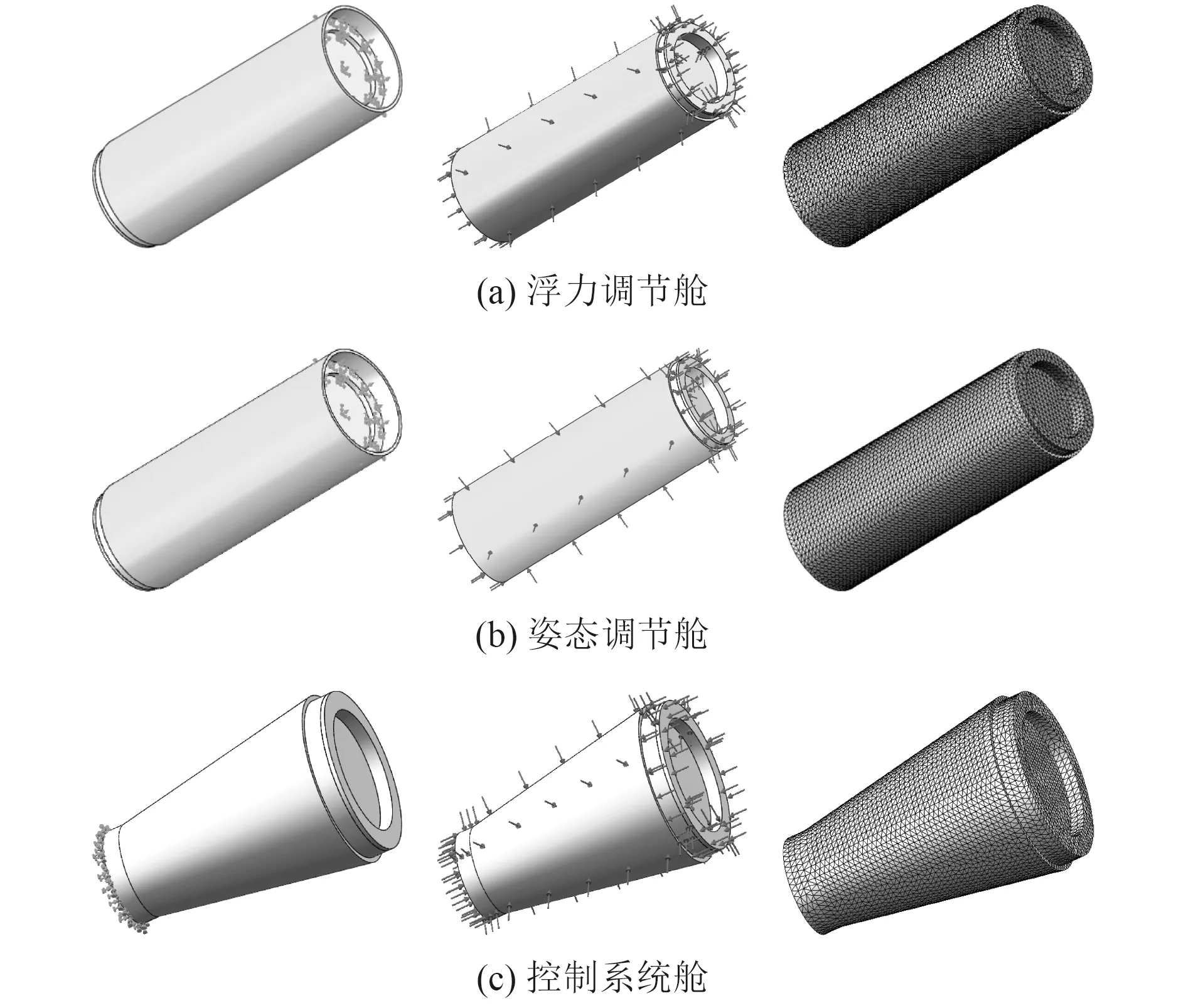
图 15 承压构件数值计算的约束、载荷施加及网格划分图Fig. 15Constraints,load application and meshing diagrams for numerical calculation of pressure members
在计算时,采用直接离散法(Direct Sparse)求解器进行求解,得到应力、应变和位移分布云图,并给出最大应力的分布区域。
图16 给出了数值计算结果,可以看出:
1)浮力调节舱最大应力约为159.4 MPa,位于端盖中心处最大位移量为0.3 mm,安全系数1.72;
2)姿态调节舱最大应力约为83.34 MPa,。在圆筒壁靠近端盖处最大位移0.08 mm,舱安全系数3.30;
3)控制舱最大应力为59.5 MPa,圆筒壁靠近端盖最大位移为0.17 mm。安全系数4.62。
根据《潜水系统和潜水器入级规范》要求的安全系数不小于1.5,本HUG 系统中所有承压部件均满足规范要求。
4.1 稳定性分析
耐压舱体不仅需要满足结构强度要求,也需要满足稳定性要求。采用屈曲分析法,计算结构的临界载荷和屈曲模态形状结构发生屈曲响应的特征形状。
耐压舱体特征值屈曲分析,对3 段耐压结构舱的所有外表面均施加了10 MPa 的均匀分布载荷,并进行网格划分。图17 分别为浮力调节舱、俯仰姿态调节舱和控制系统舱的屈曲图。对图示内容进行计算分析,得到3 个舱室的载荷因子,分别为 λ=15.64, λ=19.33和 λ=13.24。有公式:
式中:m 为稳定安全系数; λ为载荷因子。
图 16 应力、应变和位移分布云图Fig. 16Stress,strain and displacement distribution
根据GB150-2012 对稳定性安全系数的规定,稳定安全系数m=3。从3 个舱室的屈曲图可以看出,当达到临界载荷时,舱体发生了屈曲变形,局部存在皱褶,舱体也即在皱褶处存在最大位移。因结构在 1 000 m最大水深时预期受到的载荷值远小于通过稳定性分析得出的极限载荷值,故设计的舱体结构均满足要求。
5 结 语
为实现水下无人航行器在复杂海洋环境中长航程和航行高保持能力,提出一种分布式推进与滑翔混合驱动的大翼展水下无人航行器的新构型设计。突破常规混合动力航行器的设计理念,创新性地通过翼梢分布推进器,实现低功耗航向的实时控制,为突破海洋环境中尺度涡提供新的思路。采用仿鳐鱼大翼展设计,提高升阻比,增加滑翔比,实现长航程。
