基于ZAM-GTFR 和Hough Transform 的LFM 信号检测
2021-01-18曾小东曾德国
曾小东,张 薇,曾德国,祝 俊
(电子科技大学 电子工程学院,四川成都 611731)
0 引言
目前,低截获概率信号已经广泛应用于各种新体制雷达中,比较典型的如线性调频(Linear Fre‑quency Modulation,LFM)信号。LFM 信号具有很好的隐蔽性和抗干扰性,使得传统的基于功率峰值检测的雷达侦察设备很难完成对其的截获,需要研究新的检测方法来突破LFM 信号的低截获性。为此,近年来国内外众多学者针对LFM 信号的检测问题提出了许多新的处理方法。其中,比较典型的如BARBAROSSA[1]、孙晓昶等[2]、刘建成等[3]利用Wigner-Hough 变换(Wigner-Hough Transform,WHT)对LFM 信号进行检测,并分析了检测性能,对于多分量情况Wigner 的交叉项非常严重,导致Hough 变换无法正确提取时频的直线,故对多分量的检测性能不佳。KAY 等[4]、WOOD 等[5]、冉鑫等[6]使用Radon-Wigner 变换(Radon-Wigner Transform,RWT)分析了LFM 的检测,与WHT 一样存在交叉项问题;WANG 等[7]、JENNISON 等[8]、刘爱芳等[9]基于Radon-Ambiguity 变换(Radon-Ambiguity Trans‑form,RAT)同样完成了LFM 信号检测和参数估计,但由于Ambiguity 变换的时频聚集性有限,LFM 的检测概率受到一定影响。其他的方法还有基于Frac‑tional Fourier Transform(FFT)[10-12]和匹配傅里叶变换(Matched Fourier Transform,MFT)、多通道数字去斜和多通道自相关[13]等LFM 信号检测方法。
可以看出,LFM 信号的检测广泛地运用了时频分析的方法,ZAM-GTFR 作为一种典型的时频分布,具有诸多优点,如同时具备高的时间、频率分辨力,时域上维持了有限时间支撑,频域上加强了谱峰,且具备抑制交叉项的能力[14-15]。经过推导分析发现,ZAM-GTFR 对LFM 的调频斜率有极强的感知能力,能够用来分析LFM 信号的检测等问题。所以,本文综合前人的研究成果,针对LFM 的检测问题,提出了将ZAM-GTFR 和Hough 变换(Hough Transform,HT)相结合的方法,利用LFM 信号在ZAM-GTFR 变换后能够获得二维时间-频率分布的能量聚集特性,再进行HT 提取二维平面的瞬时频率直线特征,得到脉冲尖峰。通过仿真能够看出,在较低的信噪比下该方法仍然具有良好的检测性能。
1 问题描述
考虑高斯白噪声中,未知参量信号的检测问题,特别地,考虑观测时间为(-T/2,T/2)的接收信号r(t)。二元假设为

式中:w(t) 为零均值复高斯白噪声,即w(t)=wR(t)+jwI(t),其中,wR(t)、wI(t)为相互独立的零均值实高斯白噪声,功率谱密度均为Pw(f)=N0/2;x(t;θ)为参量θ未知的复确定信号。
2 LFM 检测
对于大量的存储数据情况,广义似然比检测系统(Generalized Likelihood Ratio Test,GLRT)是最佳的检测系统,不同的判决准则只影响门限值γ的大小。因此,可得出如下检测准则:

文献[4]利用RWT 分析了LFM 信号的检测问题。同样地,ZAM-GTFR 作为另一种Cohen 类时频分布,具备锥形核,可在一定程度上解决Wigner-Ville 分布(Wigner-Ville Distribution,WVD)的交叉项问题,所以ZAM-GTFR 也可用于LFM 信号检测且多分量情况下的检测性能更佳。详细的推导如下:
首先,WVD 的定义为
对于LFM 信号

式中:瞬时频率未知;θ=[fc,k,φ0]T包含了信号的未知参数;fc为起始频率;k为调频斜率;φ0为初相。
当观测时间T→∞时,

与初相φ0无关。

式中:δ[·]为狄拉克函数;f为频率。
ZAM-GTFR 的定义为

式中:Az(t,τ)为时间t的局部相关函数;g(τ)为加权函数。同样道理,对于LFM
从式(8)可以看出,ZAM-GTFR 也与LFM 初相φ0无关。并且对比式(5)与式(8),我们发现,对于LFM 信号,ZAM-GTFR 相当于在WVD 的基础上,作了一个加窗处理。其中,窗函数为

在频率域起到了平滑作用,可以在时频平面对频率方向的交叉项起到抑制的作用,所以ZAM-GTFR 在一定程度上克服了WVD 易受时频平面交叉项影响的缺点,特别是当处理数据量较大(多个调频时宽)时,优势可能更明显,特别适合多分量LFM 的信号处理。为了简化推导,假设加权函数g(τ)=1,则
是广义超几何函数(λ)n=λ(λ+1)(λ+2)…(λ+n-1),(λ)0=1,a1=1/2,a2=1,b1=3/4,b2=5/4,b3=3/2,z=-(π2f4)/(4k2)[16]。
根据文献[4],有如下的GLRT 检测准则:


所以,由式(14)可知,对于LFM 信号的检测,可以分为以下几个步骤:
步骤1对截获的信号计算其ZAM-GTFR分布;
步骤2沿ZAM-GTFR 后时频平面上的所有直线做积分;
步骤3用最大的积分结果与指定的门限ηz做比较。若超过门限,则表明假设H1成立,有信号存在。
对于步骤2 的积分处理,有许多变换可以实现,如Radon 变换、Hough 变换等。本文拟采用Hough 变换,因为Hough 变换可以将平面里的直线映射为另一个二维平面的一个点,其实质是一个坐标变换,用一个新的2-D 坐标系(ρ,θ)替代原(t,f)。具体的变换关系为

对式(15)稍加整理可得

对于(t,f)平面上的任意一点,t、f为某常数,(ρ,θ)平面有一个与之对应的正弦曲线。一方面,如果在(t,f)上有一条直线,从该直线上的各点映射到(ρ,θ)的各正弦曲线将如积分一般,相交于一点,假设映射过程保持强度不变,则将在(ρ,θ)平面产生一个尖锐的峰值[17];另一方面,随机噪声分布在整个平面上,因此,映射后的各正弦曲线不能相交形成一个尖峰。
3 性能分析
3.1 交叉项与计算量分析
为了分析ZAM-GTFR 时频分布的交叉项影响,常常以多分量音调信号

为考察对象。其中,f1、f2为信号p(t)的两个不同载频。文献[17]指出,p(t)的ZAM-GTFR 由信号项和交叉项组成:

式中:信号项为

式中:L(f)为|τ|的傅里叶变换。
为了将本文算法应用于实际系统,考察ZAMGTFR 的计算量,假设L为频率点数,L=(M-1)/2,M为窗长。离散形式的ZAM-GTFR 等效为离散傅里叶变换取实部,所以可由基-2 的快速傅里叶变换(FFT)实现[14]。故计算一次ZAM-GTFR 需要(L/2)log2L次复数乘法和Llog2L次复数加法。
3.2 仿真结果
为了验证本文算法的有效性,做了如下的仿真。
仿真1实验中,采样频率fs为200 MHz,信号持续时间为T=3 μs,全频段信噪比为5 dB,LFM 分量1 的起始频率fc1=10 MHz,带宽B1=10 MHz,分量2 的起始频率fc2=15 MHz,带宽B2=20 MHz。仿真结果如图1~图3 所示。
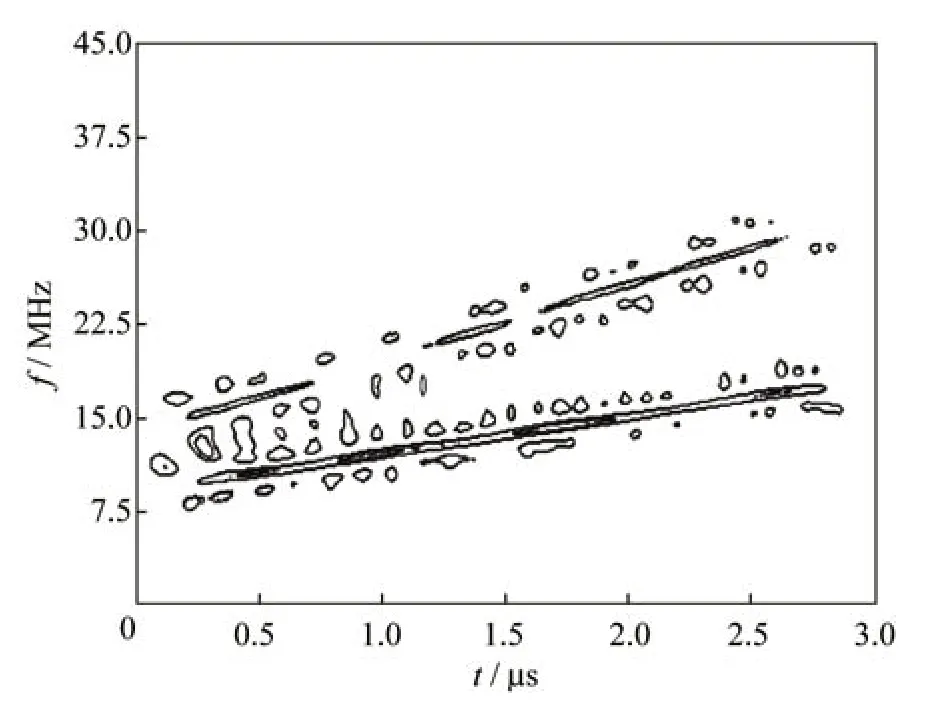
图1 加噪LFM 的ZAM-GTFRFig.1 ZAM-GTFR of LFM with noise

图2 高斯白噪声的ZAM-GTFRFig.2 ZAM-GTFR of Gaussian white noise

图3 信号ZAM-GTFR 的HF 值Fig.3 HF value of the signal ZAM-GTFR
仿真2实验中,采样频率fs为200 MHz,信号持续时间为T=5.12 μs,全频段信噪比为-5 dB到+5 dB,LFM 的起始频率fc=10 MHz,带宽B=10 MHz,与文献[1-3]提出的WHT 和相关法做了对比分析。仿真结果如图4 所示。

图4 LFM 的检测概率Fig.4 Detection probability of LFM
由图1 和图2 可知,ZAM-GTFR 很好地反映了LFM 信号的瞬时频率信息,且对于多分量信号而言能有效抑制交叉项的影响。图3 即进一步利用HT提取LFM 信号ZAM-GTFR 后的特征参数,可以看出在时频面上出现瞬时频率直线条件下,HT 变换后将对应出现一个明显的尖峰,且峰值的个数代表了LFM 分量的个数。
由图4 可知,在相同的检测准则下,由于ZAMGTFR 的U(τ)=sin(πkτ|τ|)/πkτ加窗效应,相对于WVD 而言,能够有效降低噪声对信号检测的影响,使得基于ZAM-GTFR 和HT 的检测方法在低信噪比下性能优于WHT,能够提高大约1 dB 的信噪比。同时,相关法信号处理速度快,适合实时处理,但是在低信噪比环境下,检测概率大大下降。
4 结束语
本文运用时频分析理论,推导了LFM 信号的ZAM-GTFR,利用HT 成功提取了信号的特征参数,并探讨了LFM 的检测性能。仿真分析表明,与基于WHT 的信号检测方法相比,本文算法能够在更低的信噪比下获得高概率的检测性能。