基于CNES实时多系统产品PPP时间传递
2021-01-15姚攀杨旭海孙保琪武美芳
姚攀,杨旭海,孙保琪,武美芳
基于CNES实时多系统产品PPP时间传递
姚攀1,2,3,杨旭海1,2,4,孙保琪1,2,4,武美芳1,2
(1. 中国科学院 国家授时中心,西安 710600;2. 中国科学院 精密导航定位与定时技术重点实验室,西安 710600;3. 中国科学院大学,北京 100049;4. 中国科学院大学 天文与空间科学学院,北京 101048)
IGS(International GNSS Service)实时产品精度的不断提高,为开展基于IGS实时产品的PPP(precise point positioning)时间传递试验提供了有力条件。为了探索实时多系统产品应用于时间传递所能达到的效果,本文获取IGS分析中心法国空间研究中心(CNES)2018年5月1日至2019年4月30日共365d的实时多系统产品,利用7个测站的365d观测数据,从不同GNSS(Global Navigation Satellite System)系统组合、截止高度角的变化两个角度,设计了多种试验策略并进行PPP解算。结果表明,基于CNES实时GPS(Global Positioning System)单系统产品得到的时间传递链路结果与使用IGR产品得到的时间传递链路结果作差,两者差异的标准偏差(STD)在0.3~0.5ns之间;利用多种组合模式的多系统产品得到的STD相较于GPS单系统有所减小,在截止高度角为10°,20°,30°时,STD减小的百分比分别为11.11%~13.89%,10.81%~16.21%,11.42%~12.82%。
精密单点定位;时间传递;多系统;实时产品
0 引言
共视法和全视法是国际权度局(Bureau International des Poids et Mesures,BIPM)主要使用的两种GNSS时间传递方法,但共视法、全视法都是基于伪距观测值的时间传递方法,其受伪距观测噪声和多路径效应影响较大[1-2]。为了克服这些缺点,研究人员采用基于载波相位的精密单点定位(precise point positioning,PPP)技术来实现时间传递[3-4]。BIPM首先将GPS PPP技术用于国际原子时(International Atomic Time,TAI)比较,结果表明,GPS PPP时间传递的A类不确定度为0.3 ns[5]。2009年开始,GPS PPP成为国际原子时例行时间传递技术之一[6]。目前大多学者基本都是使用事后产品进行GPS PPP时间传递研究。2017年中国科学院国家授时中心张立等对多系统产品应用于GPS PPP时间传递进行了比对[7]。BIPM基于IGS快速产品IGR开展GPS PPP时间传递[8]。虽然都能够实现纳秒级和亚纳秒的时间传递,但是无法满足对时效性要求较高的用户。从2013年4月1日起,IGS-RTS(International GNSS Service Real Time Service)正式发布和运行[9],基于全球实时跟踪站的观测数据和广播星历,生成实时的卫星轨道和钟差改正数。用户可以实时获取IGS及其各个分析中心播发的实时产品,结合实时广播星历生成高精度的卫星轨道和钟差,服务于对产品时效性要求较高的用户。目前,关于PPP时间传递的研究重点在事后模式,而实时PPP时间传递的研究也处于初步阶段,且仅限GPS PPP。随着北斗等新兴导航系统的快速发展,利用实时多系统产品采用PPP技术进行时间传递,将有助于提高时间传递的可靠性。
近年来,精度不断提高的IGS实时产品,为开展基于IGS实时产品以精密单点定位(PPP)模式进行时间传递试验提供了有力条件。本文对IGS分析中心法国空间研究中心(Centre National d’Etudes Spatiales,CNES)的实时轨道与钟差产品的完整性进行统计与分析,并以IGS快速产品IGR PPP解算结果作为外部参考,利用轨道与钟差产品,选取不同GNSS系统组合,即仅GPS,GPS+BDS,GPS+GLONASS,GPS+Galileo,以及截止高度角的变化进行PPP解算,开展基于CNES实时产品PPP时间传递试验。
1 PPP方法与PPP时间传递原理
1.1 PPP方法原理
利用IGS实时精密轨道、精密卫星钟差产品以及使用消电离层组合消除电离层影响后的双频组合观测值,采用PPP方法进行时间传递试验,其观测方程可表示为:



1.2 PPP时间传递基本原理

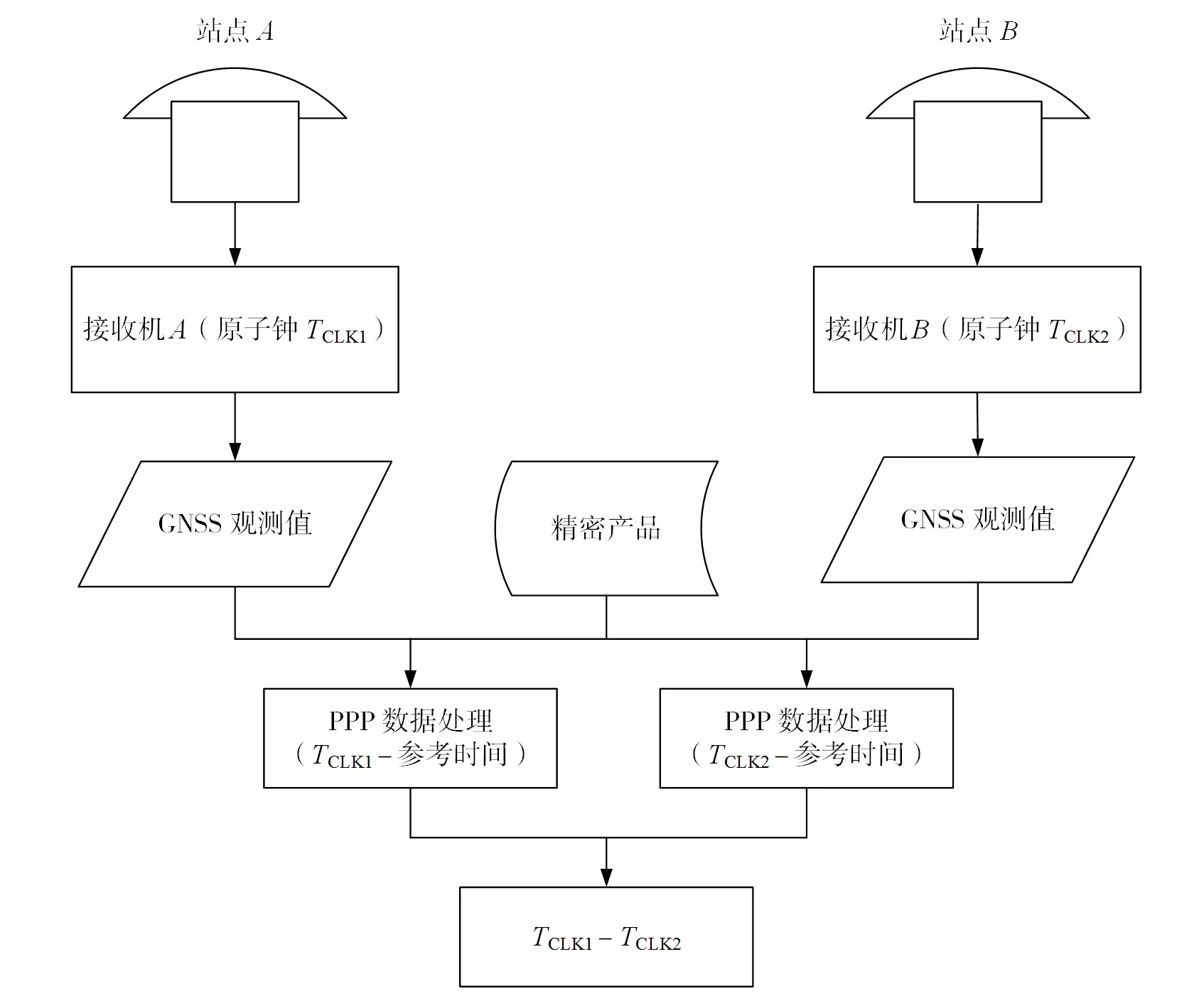
图1 PPP时间传递基本原理图
2 实验数据与策略
2.1 观测数据
本次试验选取7个外接高精度时间参考的GNSS跟踪站,7个测站均是IGS MGEX(multi-GNSS experiment)站点,其中WAB2,PTBB,BRUX是位于时间实验室的站点,各个测站的接收机均外接高精度原子钟。图2是本次试验选取测站的站点分布图,其中BRUX作为本次试验的中心节点。观测数据弧段从2018年5月1日开始,到2019年4月30日结束共365 d,其采样间隔为30 s。

图2 试验站点分布图
本次试验选取的所有站点接收机、天线配置以及外接原子钟,详细情况如表1所示。

表1 站点配置信息统计
2.2 实时产品及其完整性分析
进行实时产品的可用性分析时,主要从两个方面进行分析:第一个方面是实时产品完整性问题,受实时产品数据源等因素的影响,造成实时接收的数据不完整;第二个方面是产品时延问题,即实时产品延迟不能大于90s,目前IGS实时产品基本满足这一要求[10]。因此,本文主要对从2018年5月1日至2019年4月30日共365d实时数据流的完整性进行了分析。
由表2可知,CNES实时产品数据完整性存在以下两个问题:① 实时产品数据不连续,多系统的实时产品数据完整率都没有达到100%,部分卫星的数据完整率较低,比如E13,E15和E21号卫星数据完整率低于50%。② 多系统的实时产品中,GPS和GLONASS的实时产品整体完整率均高于90%,而Galileo和BDS的实时产品整体完整率分别为70.66%和84.34%。以上两个问题可能是数据源部分卫星数据缺失或数据流中断等因素造成的。
表2 实时产品数据完整率统计

2.3 解算策略
本次实验主要在静态模式下,利用CNES多系统实时产品,选取不同GNSS系统组合,即GPS,GPS+BDS,GPS+GLONASS和GPS+Galileo,以及截止高度角的变化,分别设置为10°,20°和30°,开展PPP时间传递试验。PPP解算时,使用无电离层组合模型,参数估计使用卡尔曼滤波方法,详细的数据处理解算策略设置如表3所示。

表3 PPP数据处理解算策略
3 评价方法
本文使用基于IGS快速产品IGR PPP解算的结果作为外部参考标准,来衡量CNES实时多系统产品的时间传递能够达到的效果,主要有两个原因:第一,BIPM计算国际原子时,使用IGS快速产品IGR,采用PPP技术解算得到各时间实验室钟差,其可比性更强;第二,IGS快速产品IGR的钟差精度高达0.075 ns[8],可以满足精密时间传递的需求。不选择精度更高的IGS最终产品,主要是因为IGS最终产品的时延较长,且IGR产品精度也符合要求[11]。
此次试验将利用CNES实时产品PPP解算得到的时间传递链路钟差序列,与使用IGR产品(截止高度角为10°,其他参数设置相同)PPP解算得到的时间传递链路钟差序列作差,统计差异STD(standard deviation)作为评估标准,具体计算公式如下:

本次试验使用Stable32软件计算得到时间传递链路钟差序列的修正Allan偏差(modified Allan deviation,MDEV),并通过修正Allan偏差来判断PPP时间传递的稳定度[12-13]。
4 实验结果与分析
本次实验首先利用CNES实时产品中的GPS系统产品,设置截止高度角为10°,进行PPP解算,得到所有试验链路的时间链路结果与使用IGR产品得到的时间链路结果作差,并对差异结果进行统计。图3分别是BRUX-PTBB和BRUX-WAB2的时间链路结果序列图,从中可以发现,使用CNES实时产品中的GPS单系统产品和使用IGR产品两者的解算结果符合程度较好。图中部分时段链路比对结果缺失是观测数据缺失或观测数据质量较差导致解算失败而引起的。BRUX-BOR1,BRUX-GMSD,BRUX-HOB2和BRUX-WTZR这4条链路比对结果呈现相同的趋势,相应的时间序列图这里不再一一展示。

图3 GPS PPP(CNES)-GPS PPP(IGR)结果比对时间序列图
表4是GPS(CNES)-GPS PPP(IGR)时间链路比对结果STD的统计,从统计结果可以看出BRUX-BOR1,BRUX-GMSD等6条时间传递链路比对结果的STD值均在0.1~0.5ns之间。结合图4可以看出,使用CNES实时GPS单系统产品所得的链路BRUX-PTBB的PPP时间传递的稳定度和使用IGR产品所得到的稳定度接近,天稳分别可以达到6.6×10-15和6.4×10-15。

表4 GPS PPP(CNES)-PPP(IGR)比对结果标准偏差统计 单位:ns

图4 不同产品GPS PPP解算的BRUX-PTBB的修正Allan偏差
在上述基础上,基于CNES多系统实时产品,截止高度角设置为10°,选择GPS+BDS,GPS+GLONASS和GPS+Galileo不同星座之间组合进行PPP解算。由于PTBB,WAB2这两个测站的观测值是GPS单系统,所有在进行不同星座之间组合解算时,BRUX,BOR1,GMSD,HOB2和WTZR这5个测站进行解算。图5是PPP(CNES)时间链路结果与GPS(IGR)时间链路结果差值的STD值统计,从图中可以看出,使用CNES多系统实时产品中GPS+BDS,GPS+GLONASS和GPS+Galileo不同星座之间组合进行PPP时间传递,其STD均小于0.4 ns。图6是BRUX-BOR1,BRUX-GMSD,BRUX-HOB2和BRUX-WTZR 4条链路使用CNES多系统实时产品与GPS单系统实时产品STD减小的百分比统计图,从图中可以发现,使用CNES多系统实时产品STD值有所减小,其中BRUX-HOB2和BRUX-GMSD两条时间链路结果STD明显减小,主要原因是利用CNES多系统实时产品相比GPS单系统实时产品,可以使用的卫星数据更多,图7和图8分别显示了2017年,年积日为150,BRUX和GMSD两个测站不同星座组合的可视卫星数量和钟差精度因子TDOP(time dilution of precision)值,从图7和图8中可以看出,相比GPS单系统,BRUX和GMSD测站不同GPS+BDS,GPS+GLONASS和GPS+Galileo不同星座之间组合,TDOP明显减小,其中BRUX测站GPS平均TDOP为1.02,GPS+BDS平均TDOP为0.70,GPS+GLONASS平均TDOP为0.66,GPS+Galileo平均TDOP为0.77。整体来看,在使用CNES实时多系统产品GPS+GLONASS组合进行PPP时间传递试验,其STD小于GPS+BDS、GPS+Galileo组合,主要原因GLONASS实时产品数据完整率高于BDS和Galileo。图9是使用CNES实时产品中不同系统组合PPP解算的BRUX-HOB2的MDEV,不难发现使用CNES多系统实时产品所得的链路BRUX-HOB2的PPP时间传递的稳定度优于使用GPS单系统实时产品所得到的稳定度。

图5 PPP(CNES)-PPP(IGR)比对结果标准偏差值统计

图6 使用多系统产品相对于使用单GPS实时产品时间传递标准偏差值减小百分比统计

图7 BRUX站可视卫星数和钟差精度因子
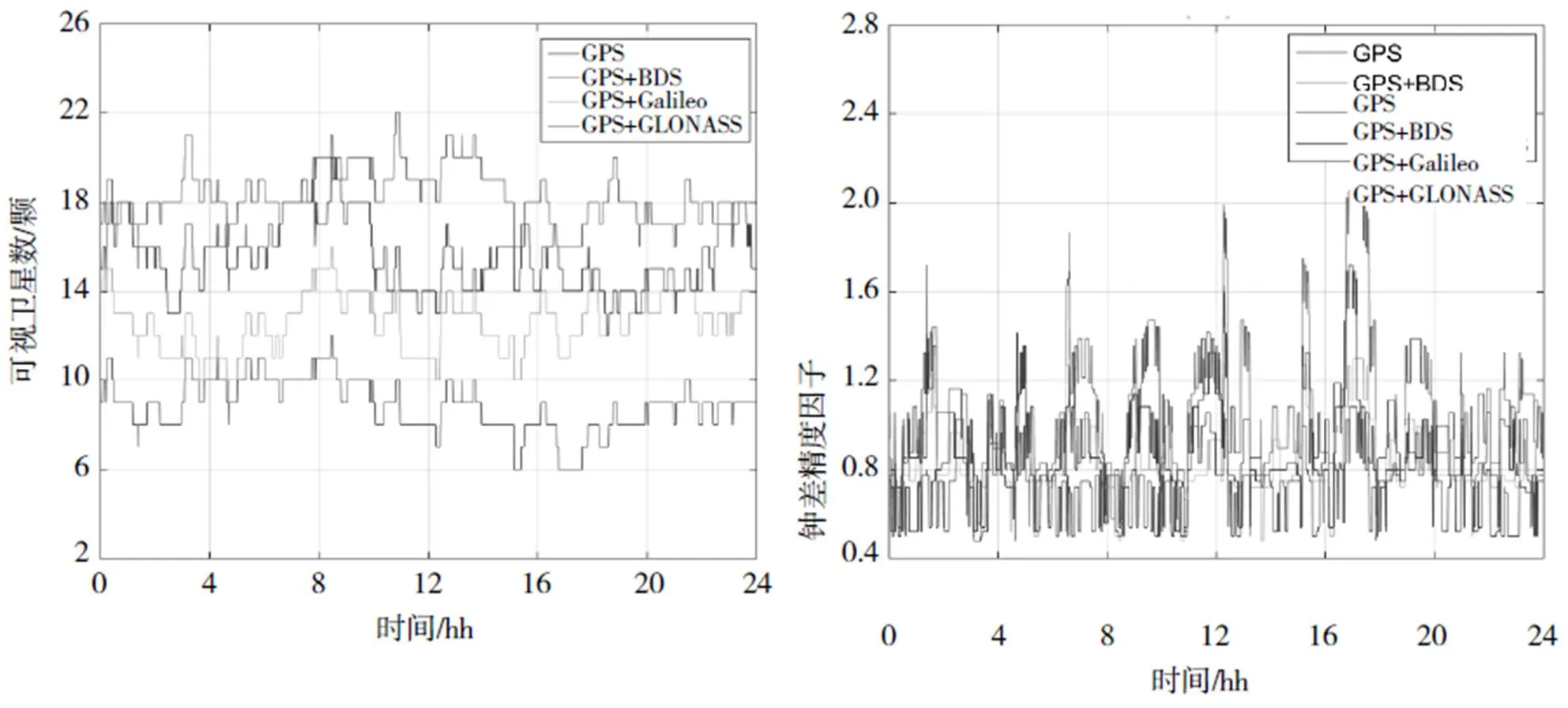
图8 GMSD 站可视卫星数和钟差精度因子

图9 实时产品中不同系统组合PPP解算的BRUX-HOB2的修正Allan偏差
上述试验结果都是基于良好的观测条件下得出的,而现实中的观测条件存在不确定性。因此,我们模拟开展了在外界环境有限的条件下的PPP时间传递试验。依旧在静态模式下,使用CNES实时产品中GPS+BDS,GPS+GLONASS和GPS+Galileo不同星座之间组合进行PPP解算,截止高度角分别为20°和30°,进行所有链路结果的平均STD值统计以及相对使用GPS单系统实时产品链路结果改善情况统计。从表5可以发现,截止高度角为10°,20°,30°时,使用CNES多系统实时产品,STD在0.3~0.4 ns之间。同使用GPS单系统实时产品相比,4条时间链路结果STD减小百分比分别在11.11%~13.89%,10.81%~16.21%,11.42%~12.82%。

表5 所有链路平均标准偏差值统计结果 单位:ns
图10至图12分别是BRUX-HOB2时间链路基于GPS+Galileo实时产品、GPS+BDS实时产品和GPS+GLONASS实时产品PPP解算的MDEV。从图中可以看到,在截止高度角为20°时,PPP时间传递结果的长期稳定度优于截止高度角为10°的结果,原因可能是在截止高度角为20°时,PPP解算时受到多路径效应的影响较小。当截止高度角为30°时,长期稳定度较差,可能是由于可见卫星数量较少所导致的。BRUX-GMSD、BRUX-BOR1、BRUX-WTZR 3条时间链路基于不同GNSS组合的实时产品PPP解算的MDEV与BRUX-HOB2时间链路的MDEV趋势相同,这里不再一一展示。

图10 GPS+Galileo实时产品PPP解算的BRUX-HOB2的修正Allan偏差

图12 GPS+GLONASS实时产品PPP解算的BRUX-HOB2的修正Allan偏差
5 结语
本文首先对法国空间研究中心提供的多系统实时轨道和钟差产品的完整性进行统计和分析,统计得到CNES多系统实时产品的完整率,其中GPS系统和GLONASS系统的实时产品完整率高于90%,Galileo系统和BDS系统的实时产品完整率分别为70.66%和84.34%。然后将CNES的实时轨道与钟差产品用于PPP时间传递,从不同GNSS系统组合、截止高度角的变化两个角度,设计了多种试验策略并进行PPP解算。结果表明,使用CNES 实时GPS单系统产品,PPP时间传递的标准偏差在0.3~0.5 ns之间;利用多种组合模式的多系统产品得到的STD相较于GPS单系统有所减小,在截止高度角为10°,20°,30°时,STD减小的百分比分别为11.11%~13.89%,10.81%~16.21%,11.42%~12.82%。
致谢:感谢IGS提供的实时多系统产品和观测数据;感谢中国科学院国家授时中心iGMAS分析中心、国家科技基础条件平台—国家空间科学数据中心(http://www.nssdc.ac.cn)、中科院“西部之光”人才培养计划“一带一路”团队项目“北斗授时监测及其国际时间比对团队”提供的帮助。
[1] LEE S W, SCHUTZ B E, LEE C B, et al. A study on the common-view and all-in-view GPS time transfer using carrier-phase measurements[J]. Metrologia, 2008, 45(2): 156-167.
[2] GE Y L, YANG X H, QIN W J, et al. Mitigation of the multipath effect in BDS-based time transfer using a waveabsorbing shield[J]. Advances in Space Research, 2018, 63(9): 1-2.
[3] RAY J, SENIOR K. Geodetic techniques for time and frequency comparisons using GPS phase and code measurements[J]. Metrologia, 2005, 42(4): 215-232.
[4] TU R, ZHANG P F, ZHANG R, et al. Approach for GPS precise time transfer using an augmentation information and zero-differenced PPP model[J]. IET Radar, Sonar & Navigation, 2018, 12(8): 801-806.
[5] PETIT G, JIANG Z H. Precise point positioning for TAI computation[J]. IEEE, 2008, 562878: 1-8.
[6] 欧阳明俊, 杨旭海, 孙保琪, 等. 基于初始运行阶段Galileo PPP国际时间传递[J]. 时间频率学报, 2019, 42(2): 176-182.
[7] 张立, 孙保琪, 武文俊, 等. 基于IGS MGEX产品分析GPS PPP时间传递[J]. 时间频率学报, 2018, 41(2): 88-94.
[8] IGS. International GNSS Service[EB/OL]. (2020-01-15)[2020-04-10]http://www.igs.org/products.
[9] 王胜利, 王庆, 高旺, 等. IGS实时产品质量分析及其在实时精密单点定位中的应用[J]. 东南大学学报(自然科学版), 2013, 43(S2): 365-369.
[10] ZHANG L, YANG H Z, GAO Y, et al. Evaluation and analysis of real-time precise orbits and clocks products from different IGS analysis centers[J]. Advances in Space Research, 2018, 61(12): 2942-2954.
[11] 张小红, 蔡诗响, 李星星, 等. 利用GPS精密单点定位进行时间传递精度分析[J]. 武汉大学学报(信息科学版), 2010, 35(3): 274-278.
[12] HARMEGNIES A, DEFRAIGNE P, PETIT G. Combining GPS and GLONASS in all-in-view for time transfer[J]. Metrologia, 2013, 50(3): 277-287.
[13] PETIT G, KANJ A, LOYER S, et al. 1×10−16frequency transfer by GPS PPP with integer ambiguity resolution[J]. Metrologia, 2015, 52(2): 301-309.
PPP time transfer based on CNES real-time GNSS products
YAO Pan1,2,3, YANG Xu-hai1,2,4, SUN Bao-qi1,2,4, WU Mei-fang1,2
(1. National Time Service Center, Chinese Academy of Sciences, Xi’an 710600, China;2. Key Laboratory of Precise Positioning and Timing Technology, Chinese Academy of Sciences, Xi’an 710600, China;3. University of Chinese Academy of Sciences, Beijing 100049, China;4. School of Astronomical and Space Science, University of Chinese Academy of Sciences, Beijing 101048, China)
The continuous improvement of the accuracy of IGS real-time products provides a opportunity for tesing and performance evaluation of PPP (precise point positioning) time transfer by using IGS (International GNSS Service) real-time products. In order to study the effect on time transfer by using real-time multi-GNSS products in this work, 1-year real-time multi-GNSS products from the IGS Analysis Center’s Centre National d’Etudes Spatiales (CNES) and observational data from 7 stations are used to evaluate the strategy of different GNSS system combinations and cut-off height angle. The results show that the standard deviation of time transfer difference between CNES real-time GPS-only products and the IGR products is around 0.3 ns to 0.5 ns. In summary, compared to the GPS-only system, the STD obtained by multi-GNSS products is reduced: the STD is reduced by 11.11% - 13.89%, 10.81% - 16.21%, 11.42% - 12.82%, at a cut-off height angles of 10°, 20°, 30°, respectively.
precise point positioning; time transfer; multi-GNSS; real-time products
10.13875/j.issn.1674-0637.2020-04-0288-12
姚攀,杨旭海,孙保琪,等. 基于CNES实时多系统产品PPP时间传递[J]. 时间频率学报, 2020, 43(4): 288-299.
2020-04-22;
2020-05-22
中国科学院“西部之光”人才培养计划“西部青年学者”B类资助项目(XAB2018B19)