考虑跨区多能源协调的交直流输电系统稳定性控制模型
2021-01-14康赫然刘宏扬赵树野顾大可
康赫然, 党 伟, 刘宏扬, 张 昭, 赵树野, 顾大可, 孙 鹏
(1.国网内蒙古东部电力有限公司经济技术研究院, 内蒙古 呼和浩特 010020; 2.东北电力大学, 吉林 吉林132012; 3.沈阳工业大学, 辽宁 沈阳 110870)
0 前言
交直流混联电网是电网发展的新形态,具有脆弱性、可控性、发生连锁故障等特点[1]。 我国已建成世界上规模最大、电压等级最高的交直流混联电网,而且我国的大规模特高压交直流混联电网正处于高速发展时期[2],[3]。但交流和直流系统控制特性不同,且发生故障后的交直流混联系统具有时空非线性时变性等特点[4]。 传统以戴维南等效电路的交流系统故障分析方法不能有效评价其暂态过程,寻求新的交直流混联系统的暂态稳定控制方法已成为当务之急。 含大规模清洁能源的交直流混联电网存在着诸多不确定参数摄动问题(如风电出力、负荷等不确定性问题),若同时出现暂态故障,则可能会导致整个系统失稳,使交直流输电系统稳定性控制面临严峻挑战。
交直流混联系统稳定性控制是至关重要的研究领域,是能源安稳运行与可持续利用的有效保障[5]。 其中,交流子系统与直流子系统之间通过DC/AC 换流站、电力电子变压器等设备互联[6]。 目前,国内外学者对交流子系统稳定控制或直流子系统稳定控制的研究已经较为成熟[7]~[9]。交直流混联系统运行模式比单一交流子系统或直流子系统更为复杂,具有较强的非线性、时变性和不确定性。一方面,在系统并网、孤岛运行时,换流站的互联设备须要保持交流、直流子系统的正常工作;另一方面,在不同运行模式下,尤其是在无配电网支撑情况下孤岛运行时, 须要换流站以及源网荷储相互配合,制定适当的控制策略。
近年来, 研究人员对特高压电网的安全稳定控制的关注度逐渐提升。文献[10]针对直流电网中电压稳定控制问题, 提出一种考虑大规模储能的柔性电压控制策略, 提高了直流电网对交流电网的惯性响应能力;文献[11]通过引入变结构控制理论来设计多机交直流混合系统的直流功率调制以改善系统的暂态稳定性。目前,针对大规模风电接入的外送系统暂态稳定性控制的研究处于起步阶段。文献[12]认为以风火功角曲线为主动交越及双馈风力发电机的快速恢复特性不利于系统的功角稳定性;文献[13]认为由于风火交互具有不确定性,风电对交直流互联系统的影响有利有弊。
目前的研究较少涉及到含弱送端大功率高不确定性风电的交直流互联系统的暂态稳定优化控制问题。 本文以交直流混联系统实现风电外送的实际工程为例, 提出考虑风电不确定性的交直流混联系统稳定控制模型。 将动态逆方法作为鲁棒控制的内环,将储电、储热装置作为多能源进行协调,对模型不确定性进行外环鲁棒控制补偿。 在此基础上, 建立基于动态逆与H∞鲁棒控制相结合的交直流混联系统控制器模型,为新能源大规模送出型特高压交直流混联电网稳定性控制提供依据。
1 交直流混联系统不确定性模型
1.1 结构化参数不确定性
交直流混联系统中具体参数的误差可表示系统结构化不确定性。影响交直流混联系统结构不确定性的参数主要表现在风电不确定性、负荷扰动、交流线路功率震荡、直流线路功率震荡, 以这4 种参数作为系统不确定参数。为了后文进行μ-分析, 将不确定参数δ 标准归一化成δ′:

式中:δ∈[δ-,δ+];δ′∈[-1,1]。
1.2 非结构不确定性
非结构不确定性是指参数摄动或系统结构的未知变化。 设标称参数和误差分别为N 和Δ,用权重W1,W2度量误差项,那么可以用ΔW1ΔW2表示不确定项。 新系统中加成不确定性和乘积不确定性分别表示为Π=N+W1ΔW1,Π=(1+W1ΔW2)N。
1.3 LFT 不确定性建模
以纯量和全量形式对结构和非结构不确定性进行线性分式变换 (Linear Fractional Transformation,LFT),不确定结构块Δ 的摄动模型可表示为

式中:δi,Δj分别为结构不确定参数和非结构不确定块,δi∈C,Δj∈Cmj×mj,1≤i≤s,1≤j≤F;ri为纯量不确定性的维数;mj为全量不确定性的维数。
LFT 的计算公式为

式(3)为上LFT 形式,式(4)为下LFT 两种形式,M 为系统相应变量参数。
不确定性一般用结构不确定参数进行描述,但此时参数摄动为线性。 若参数摄动为非线性,可表示为无δ 的m 次多项式函数N (δ)=a0+a1δ+…+a1δm,忽略3 阶以上高阶小项后,令δ1=δ,δ2=δ2,即N(δ)= Fl(X,δI),非线性部分转化为线性,其中

式中:Ai∈Rn×n;Bi∈Rn×nu;Ci∈Rny×n;Di∈Rny×nu。
若不确定项作分母, 通过分式变换可将其变成乘积形式。
结构化不确定LFT 模型通过对摄动矩阵Ai,Bi,Ci,Di进行分解可得, 非结构化不确定性的标准化同文献[14],这样就建立了交直流混联输电系统的不确定性LFT 模型。
2 控制策略与控制器设计
将LFT 模型应用于交直流混联控制系统中,为保证系统的安稳运行和鲁棒性, 控制器控制策略采用内环动态逆控制、 外环鲁棒控制相结合的方法。 本文设计的交直流混联控制系统如图1 所示, 内回路由动态逆快回路与交直流混联非线性模型构成,外回路为快回路鲁棒控制器。线性系统特性,这是由于动态逆内回路能处理非线性项。 为避免直接使用H∞鲁棒控制带来的高阶控制器,可以设计一个阶数较低并且结构参数固定的外环鲁棒控制器。
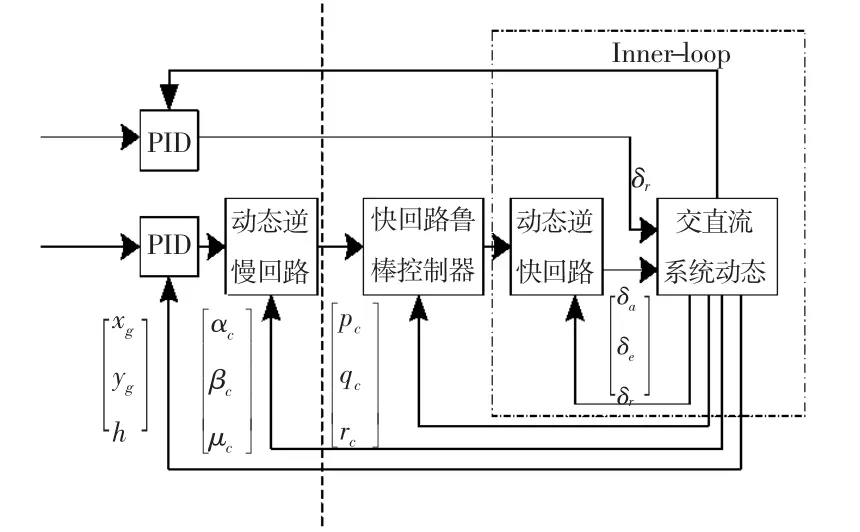
图1 交直流输电控制系统结构Fig.1 AC/DC transmission control system structure
2.1 非线性动态逆控制律——内环
动态逆方法是将耦合量解耦的一种控制方法,本文采用动态逆方法对非线性项进行内环动态逆设计。 交直流混联系统非线性方程中的状态方程为

式中:x 为交直流混联系统的状态量,x∈Rn;u 为为电机转子转速、功角、储能功率等控制系统的变参数,u∈Rp;y 为交直流混联系统输出,y∈Rm。
其中储能模型如下。
(1)电池储能

式中:EBES(t)为t 时刻电池容量;PEI(t),PEO(t)分别为t 时刻电池储、 放功率;ηEI,ηEO分别为电池储、放效率;Δt为电池运行时段。
(2)热储能
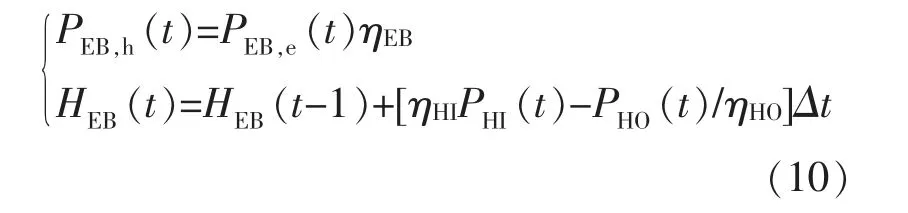
式中:PEB,h(t),PEB,e(t)分别为电锅炉耗电和制热功率;ηEB为电热转换效率;HEB(t)为t 时刻的储热容量;PHI(t),PHO(t)分别为t 时刻储热装置的储、放功率;ηHI,ηHO分别为储热装置的储、放效率。
若p=m,则控制律可以写成:

式中:gm(x)为动态模型;fm(x)为控制分配函数;CV,分别为状态变量的函数和期望的控制命令。

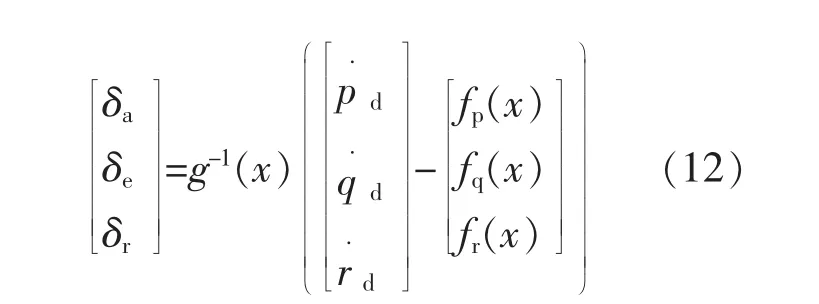
式中:δa,δe,δr为交直流混联系统的3 个单元,即交流、直流和储能单元。
2.2 H∞控制与NDI——外环
交直流混联系统的H∞控制问题可表示为
式中:N 为增广对象。
动态逆方法构成的快回路闭环中, 输入是交直流混联系统的功率指令, 输出是各机组有功和无功输出。在理想状态下,对象Ginner-loop是一种3×3矩阵形式的解耦积分型系统, 须要将其增广成Pouter-loop,并加入外环H∞控制。
图2 是交直流输电控制系统外环及不确定系统的增广结构图。 图中:r 为交直流输电控制系统上的控制命令;n 和d 分别为噪音和扰动;W1,W2,W3为3 阶权函数矩阵。

图2 交直流输电控制系统外环及不确定系统的增广Fig.2 Outer loop of AC/DC transmission control system and augmentation of uncertain system
增广模加入不确定性后的Nouter-loop的状态空间可表示为

3 算例仿真

图3 四区域交直流输电系统结构Fig.3 Structure of interconnected power system
以图3 四区域交直流混联系统为例进行仿真。 G2 电网等值负荷为1 200 MW,G1,G3 和G4 3 个区域电网等值负荷均为2 200 MW。 G2 的装机容量为2 400 MW,含风电1 300 MW。G2,G3 和G4 这3 个区域装机容量分别为1 600,1 600 MW和1 400 MW, 其中四区域储电容量为300 MW,储热容量200 MW。 在额定参数的稳定运行状态下,Line1,Line2 和Line4 输送的风电功率分别为500,400 MW 和400 MW。
3.1 暂态稳定控制策略响应特性仿真分析
图4 为考虑不确定性因素并采用μ-H∞控制后,交直流混联控制系统的灵敏度函数SF(a)和补灵敏度函数CSF(b)的奇异值曲线图。 SF(a)=(I+Nouter-loopKμ-H∞)-1,CSF (a)=Nouter-loopKμ-H∞(I+Nouter-loopKμ-H∞)-1,实线代表设计状态点,圆圈线代表状态点。 从图4 中可以看出,当计及不确定性摄动时,SF 在低频段的幅值较小,从而维持系统抗干扰能力;CSF 在高频段的幅值衰减较快,可维持系统的不确定性抑制能力。SF 和CSF 的幅值较设计状态点的偏差有所增大,但仍在容许范围内。

图4 采用μ-H∞控制器含不确定性时的闭环奇异值Fig.4 Closed-loop singular values with uncertainty using μ-H∞controller
3.2 互联系统暂态稳定控制性能仿真分析
为验证LFT 鲁棒控制方法的控制效果,与全阶观测器(FOO)的鲁棒控制器进行对比,各权函数与控制器阶数与原系统相同。
系统初始状态为正常运行,将基于LFT 鲁棒控制器与基于FOO 鲁棒控制器加入四区域互联电力系统直流整流侧[15]。 对系统在0.6 s 施加扰动: 在交流联络线Line4 上f 点发生三线接地短路,持续时间0.2 s,0.8 s 时切除故障。 对扰动下的暂态过程稳定控制情况进行仿真分析。
假设故障过程中系统出现的功率差额为8%。 以不确定参数均设置为20%为场景一,以不确定参数均设置为10%为场景二。 互联系统直流功率和交流功率在两种鲁棒控制器下的变化趋势如图5,6 所示。

图5 暂态过程中直流系统功率控制Fig.5 DC power control in transient process
在扰动过程中,G2 和G4 两区域电网间联络线切出,直流联络线单独运行。此时,区域电网G2向G4 的外送风电要向直流线路和其他交流线路转移。由于直流通道功率不能迅速增大,导致风电送端电网G2 内发电机功角和频率的大幅提高,从而产生弃风现象。 若交直流混联系统中的稳定控制不协调,亦会使系统频率恶化,严重时会导致系统崩溃[16](图7)。
本文建立的基于LFT 的鲁棒输出反馈控制模型, 充分利用了直流风电输送通道的短时过载能力,有效地抑制了互联系统中功率差额变化。通过对直流线路功率和同步机出力的快速控制,大幅提高了互联系统的暂态稳定性。
4 结论
本文针对由多个区域电网组成、 含多能源的交直流互联系统的鲁棒优化控制问题, 利用线性分式变换模型, 提出动态逆与鲁棒控制相结合的交直流输电系统暂态稳定控制方法。
①根据交直流输电系统中的结构化和非结构化不确定性特性, 提出交直流混联系不确定性线性分式变换模型。
②针对交直流输电系统线性分式变换状态方程, 设计系统暂态稳定控制的动态逆与H∞鲁棒控制相结合的控制器模型。
③以四个区域等值电网组成的交直流输电系统为例进行了仿真分析,结果表明,本文提出的控制模型具有一定的鲁棒性, 对暂态过程有较好的抑制效果。