面向轨道位置保持的故障模式下电推力器布局设计优化
2021-01-06陈余军史人赫
陈余军,魏 钊,龙 腾,史人赫
(1. 中国空间技术研究院通信与导航总体部,北京100094;2. 北京理工大学宇航学院,北京100081;3. 飞行器动力学与控制教育部重点实验室,北京100081;4. 清华大学航天航空学院,北京100084)
1 引 言
地球静止轨道(Geostationary Earth Orbit,GEO)卫星在轨运行时会受到地球非球形、日月引力和太阳光压等摄动的影响,使其逐渐偏离标称轨道,因此,GEO 卫星在轨运行期间需要进行位置保持操作[1-3]。传统的GEO 卫星通常采用化学推力器来实现位置保持,然而,其存在燃料消耗较大、位置保持精度较低等问题,严重影响了GEO 卫星的寿命[4]。相比之下,电推力器具有高比冲、小推力的特点,基于电推力器的位置保持可有效减少燃料消耗并提高位置保持精度,近年来得到了广泛的应用[5-7],例如美国波音公司的ABS 3A 全电推进卫星、德国OHB 公司的Electra 全电推进卫星以及欧洲通信卫星公司的172B 全电推进卫星[8]等。由于电推力器产生的推力大小仅是化学推力器的百分之一,且位置保持周期较长,因此,实现有效的GEO 位置保持并提高位置保持效率仍面临巨大挑战。
对于基于电推进系统的GEO卫星,其背地板通常安装有4 台电推力器,并形成一个矩形构型[9-10]。然而,当其中一台电推力器发生故障时,其对角线上另一台电推力器单独不能产生期望的速度增量来抵消摄动的影响,只有剩下的两台电推力器可以正常用于卫星的位置保持,即故障模式[11]。在完备模式下,4 台电推力器可以依次在升降交点开机来修正轨道倾角、偏心率等,能有效实现GEO 定点位置保持并最大化位置保持效率[12]。然而在故障模式下,2 台电推力器依次在升降交点开机不能抵消摄动的影响,因此必须针对电推力器的小推力特性,对位置保持策略进行定制。
目前,有不少学者开展了故障模式下的电推力器位置保持策略研究工作,例如,Zhang等[11]考虑地影等约束,提出了一种故障模式下的最优电推力器位置保持控制策略,通过优化点火位置和点火时长,可有效降低燃料消耗;Li 等[13]基于故障诊断算法设计了一套实时闭环位置保持策略,用于实现故障模式下GEO卫星的位置保持,并通过仿真验证了该方法的有效性;刘宇鑫[14]提出了三次点火故障模式下的电推力器位置保持策略,通过仿真验证了该策略可有效实现故障模式下的GEO 位置保持。尽管已有大量文献对故障模式下的GEO 卫星位置保持策略进行了研究,但大部分研究工作没有考虑电推力器布局的影响。由于GEO 卫星在位置保持期间,南北位保所消耗的燃料占整个位保过程所消耗燃料的80%以上[15],而电推力器的布局直接决定了产生的推力的方向,因此,对电推力器布局进行合理的设计与优化,对于提高电推力沿南北方向的分量系数,进而提高位置保持效率、降低燃料消耗具有非常重要的意义。
本文为进一步提高故障模式下基于电推力器的GEO卫星的位置保持效率,提出了一种故障模式下电推力器布局设计优化方案。首先建立了故障模式下电推力器位置保持模型,然后以电推力器安装位置、开机赤经和开机时长为设计变量,考虑位置保持精度等约束,建立了故障模式下电推力器布局设计优化模型,通过优化显著提高了位置保持效率、降低了燃料消耗。
2 故障模式下电推力器位置保持模型
2.1 轨道动力学模型
由于GEO 的轨道倾角和偏心率趋近于0,为防止动力学方程发生奇异,本文采用非奇异的轨道根数来描述卫星的运动,如式(1)所示:

其中,a为半长轴,Ω为升交点赤经,ω为近心点角距,i为轨道倾角,M为平近点角,λ为平经度,S为格林尼治恒星时。
卫星在轨期间通过电推力器开机产生径向、切向和法向速度增量来抵消空间摄动的影响,电推力器造成的经度漂移率改变量、偏心率矢量改变量和轨道倾角矢量改变量可表示为:

其中,ΔVR、ΔVT和ΔVN分别为电推力器开机产生的径向、切向和法向速度增量,ΔD为经度漂移率改变量,Δex和Δey为偏心率矢量改变量,Δix和Δiy为轨道倾角矢量改变量,as为GEO 半长轴,Vs为GEO 卫星运行速度,l为电推力器开机赤经。
GEO 卫星在轨运动时,主要受到日月引力、地球非球形引力和太阳光压摄动的影响。
由日月引力造成的轨道倾角矢量改变量如式(3)所示[16]:

其中,Ωsm为白道升交点黄经。
由地球非球形引力造成的经度改变量如式(4)所示[16]:

其中,J22、λ22、J31、λ31、J33和λ33为地球田谐项系数;Re是地球赤道半径;r是卫星与地心之间的距离;ωe是地球自转角速度;TD是一天的秒数。
由太阳光压造成的偏心率矢量改变量如式(5)所示[16]:
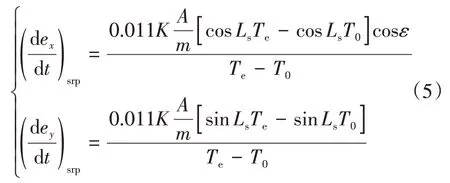
其中,K是太阳光压系数;A是卫星正对太阳光的面积;m是卫星质量;ε是黄赤交角;T0是初始儒略世纪数;Te是最终的儒略世纪数;Ls为历元时刻太阳平黄经,可通过式(6)计算得到:

其中,JD为儒略日。
基于脉冲假设,电推力器产生的速度增量和燃料消耗可通过式(7)计算得到:

其中,Δv为电推力器产生的速度增量,Δmfuel为燃料消耗,Isp为电推力器比冲,g为地球引力系数,m0为卫星初始质量,Fp为电推力器推力,Δt为开机时长。
2.2 小推力位置保持控制策略
卫星背地板共装有4 台电推力器,其中电推力器1和2安装在背地板北侧,电推力器3和4安装在背地板南侧,对称安装。在故障模式下,当其中一台电推力器发生故障时,则该电推力器与对角线上的电推力器不能正常用于卫星位置保持,以电推力器2 发生故障为例,则电推力器1 和4 可以正常用于卫星位置保持,而电推力器2 和3 不能正常用于卫星位置保持,如图1所示。
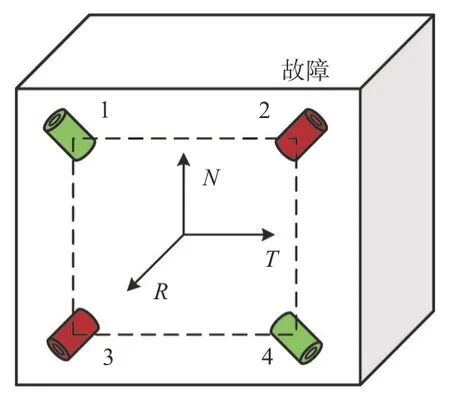
图1 故障模式下电推力器布局Fig.1 Configuration of electric thrusters in failure mode
卫星正常在轨运行时,电推力器产生的推力应指向卫星质心,则推力沿径向R、切向T和法向N的分量系数为:
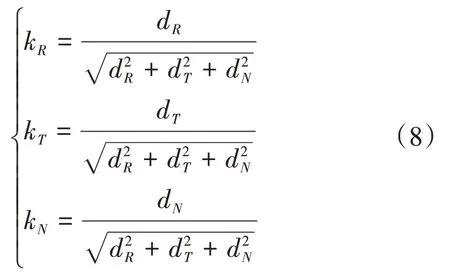
其中,kR,kT和kN分别为推力沿径向、切向和法向的分量系数,dR,dT和dN分别为电推力器安装位置沿轨道坐标系R,T,N三轴坐标的绝对值。

图2 电推力器开机赤经示意图Fig.2 Electric thruster firing right ascension diagram
一个完整的位置保持周期是14天,由1个为期2 天的轨道确定周期和6 个为期2 天的小控制周期组成。其中,在轨道确定周期内测定卫星当前的轨道根数,在小控制周期内实现卫星的GEO定点位置保持。在完备模式下,4 台电推力器可以依次在升降交点开机以最大化位置保持效率,并有效实现GEO 定点位置保持。但在故障模式下,有2 台电推力器不能正常用于卫星位置保持,剩余2 台电推力器依次在升降交点开机不能有效抵消摄动的影响,因此必须找到电推力器合适的开机位置。本研究采用文献[11]中提出的位置保持控制策略,即在每个小控制周期内,电推力器1和4各开机两次,电推力器1 开机赤经分别在0°~90°和90°~180°区间内,电推力器4开机赤经分别在180°~270°和270°~360°区间内,电推力器开机赤经如图2 所示,通过优化电推力器的开机赤经和开机时长,来实现GEO定点位置保持。电推力器在上述的赤经范围内开机,把产生的速度增量代入式(2),可得电推力器开机造成的经度漂移率改变量如式(9)所示:

其中,ΔDt为电推力器开机造成的经度漂移率改变量,kT1和kT4分别为电推力器1 和电推力器4 的推力切向分量系数,ΔvN1、ΔvN2、ΔvS1和ΔvS2分别为电推力器1 第一次开机、电推力器1 第二次开机、电推力器4第一次开机和电推力器4 第二次开机产生的速度增量。
2015年12月在宣布了中国承办2016年G20峰会之后,习总书记在土耳其是这样向世界介绍杭州的:“杭州是历史文化名城,也是创新活力之城,相信2016年峰会将会给大家呈现一种历史和现实交汇的独特韵味。”“杭州既充满浓郁的中华文化韵味,也拥有面向世界的宽广视野。”
电推力器开机造成的轨道倾角矢量改变量如式(10)所示:

其中,Δixt和Δiyt为电推力器开机造成的轨道倾角矢量改变量;kN1和kN4分别为电推力器1 和电推力器4的推力法向分量系数;lN1、lN2、lS1和lS2分别为电推力器1第一次开机、电推力器1第二次开机、电推力器4第一次开机和电推力器4第二次开机的赤经。
电推力器开机造成的偏心率矢量改变量如式(11)所示:
其中,Δext和Δeyt为电推力器开机造成的偏心率矢量改变量;kR1和kR4分别为电推力器1 和电推力器4 的推力径向分量系数。
为有效实现位置保持,在每个小控制周期内,电推力器产生的轨道根数改变量应等于摄动造成的轨道根数改变量,如式(12)所示:

其中,ΔDd为摄动造成的经度漂移率改变量;Δixd和Δiyd为摄动造成的轨道倾角矢量改变量;Δexd和Δeyd为摄动造成的偏心率矢量改变量。
按照式(12),使电推力器逐次开机来抵消摄动的影响,即可实现GEO定点位置保持。
3 故障模式下电推力器布局设计优化问题描述
3.1 电推力器布局设计优化模型
故障模式下电推力器布局设计优化问题主要包括两部分,一是每个小控制周期的位保参数优化,二是电推力器安装位置优化。其中,电推力器安装位置优化在外层,每个小控制周期的位保参数优化在内层。

其中,tN1、tN2、tS1和tS2分别为电推力器1 第一次开机、电推力器1 第二次开机、电推力器4 第一次开机和电推力器4 第二次开机的时长,mfuel为每个小控制周期的燃料消耗;λf和φf分别为每个小控制周期末端的经度和纬度;λd为定点经度。
电推力器安装位置优化问题本质上是在保证每个小控制周期的优化过程均能找到可行解的前提下,探索最优的电推力器1 和电推力器4 的安装位置,使得整个位置保持周期的燃料消耗最少。电推力器安装位置优化问题的数学模型如式(14)所示:

其中,T1和N1分别为电推力器1 的切向和法向安装坐标;mfuel_all为整个位置保持周期的总燃料消耗;g1用于判断每个小控制周期的位保参数优化是否找到可行解,若没有找到可行解,则g1>0,反之,g1≤0。
3.2 电推力器布局设计优化流程
故障模式下电推力器布局设计优化流程图如图3 所示,其中,为提高全局搜索性,外层的电推力器安装位置通过遗传算法(Genetic Algorithm,GA)进行优化;为提高找到可行解的速度,每个小控制周期的位保参数通过多初始点序列二次规划算法(Sequential Quadratic Programming,SQP)进行优化,具体步骤如下所示。
步骤一:通过GA优化电推力器安装位置,计算推力沿径向、切向和法向分量系数。
步骤二:在轨道确定周期内,确定卫星初始轨道根数以及摄动对轨道根数的改变量。
步骤三:确定每一个小控制周期内所需的电推力器开机产生的轨道根数改变量,通过多初始点SQP 优化电推力器的开机赤经和开机时长,由式(7)计算速度增量以及燃料消耗量。若优化没有找到可行解,则返回步骤一;否则,循环步骤二和步骤三,直到达到最大位置保持天数。
步骤四:输出最优电推力器安装位置,以及每个小控制周期内的电推力器开机赤经和开机时长。

图3 故障模式下电推力器布局设计优化流程图Fig.3 Electric thruster configuration design optimization flowchart in failure mode
4 仿真案例
本节通过某故障模式下的GEO 卫星电推力器布局设计优化实例来验证提出方案的有效性。本案例中,GEO 卫星入轨质量为2000kg,卫星尺寸为2m×2m×2m,卫星面质比为0.05,光压系数为1.5,电推力器额定推力为100mN,比冲4000s,仿真开始时间为2020年12月1日,仿真时长为1年,GEO 卫星定点经度为120°E。采用MATLAB R2017b ga 和fmincon 工具包进行优化,其中,GA 种群规模设为200,最大迭代次数设为30,SQP 初始点个数设为50,其他参数设为默认。卫星初始轨道根数如表1所示,设计变量取值范围如表2所示。

表1 卫星初始轨道根数Table 1 Initial orbital elements of the satellite

表2 设计变量取值范围Table 2 Range of design variables
通过优化,可以得到电推力器开机赤经和速度增量示意图如图4 所示,经度曲线和纬度曲线如图5 和图6 所示,优化前后电推力器的安装位置对比如表3 所示,优化前后电推力器布局示意图如图7所示。
图4 电推力器开机赤经和速度增量Fig.4 Firing right ascensions and velocity increments of electric thrusters

图5 经度曲线Fig.5 Longitude curve

图6 纬度曲线Fig.6 Latitude curve

表3 电推力器的安装位置对比Table 3 Electric thruster configuration comparison

表4 初始方案与优化方案燃料消耗对比Table 4 Fuel consumption comparison between the initial scheme and optimized schemes
从图4 可以看出,电推力器1 第二次开机和电推力器4 第一次开机产生的速度增量相对较大,因为从图2 可以看出,只有电推力器1 第二次开机和电推力器4 第一次开机能产生向右的推力,而电推力器1和4的四次开机均能产生向左的推力,因此,电推力器1第二次开机和电推力器4第一次开机时间相对较长,来抵消四次开机产生的反向推力的影响。从图5 和图6 可以看出,GEO 卫星的经纬度均控制在[-0.05°,0.05°],满足控制精度要求。从表3可以计算得到优化前后的推力法向分量系数分别为0.43 和0.69,且从计算结果和图7 可以看出,优化后电推力器的法向坐标到达边界,切向坐标的绝对值减小,使得优化布局的推力法向分量系数相比于初始布局增加了60.47%。因为南北位保所消耗的燃料占总燃料的80%以上,因此,优化后的电推力器布局更有利于提高位置保持效率。
优化前后燃料消耗对比如表4 所示,从表4 可以看出基于优化布局的一年的位置保持燃料消耗相比于初始布局减少了3.93kg(约为41.9%),验证了本文提出的故障模式下电推力器布局设计优化方案的有效性与工程实用性。
为进一步说明提出的故障模式下电推力器布局设计优化方案的优势,基于上述优化框架,对完备模式下的电推力进行布局设计优化,一年的位置保持燃料消耗对比如表5所示。

表5 基于故障和完备模式下电推力器布局的燃料消耗对比Table 5 Fuel consumption comparison between the failure mode and nominal mode based electric thruster configurations
从表5 可以看出,尽管只有两台电推力器可以用于位置保持,但基于故障模式下电推力器布局的一年位置保持燃料消耗相比于完备模式仅增加了0.46kg,因此说明了提出的故障模式下电推力器布局设计优化方案具有较强的在轨应急能力。
5 结 论
本文提出了一种故障模式下电推力器布局设计优化方案,可以有效实现故障模式下GEO卫星的定点位置保持,并显著提高位置保持效率。首先针对电推力器的小推力特性,建立了故障模式下电推力器位置保持模型。然后考虑电推力器安装位置、开机赤经、开机时长以及位置保持精度等,建立了故障模式下电推力器布局设计优化模型,并通过GA 与SQP 算法进行求解。优化结果表明,基于优化布局的位置保持燃料消耗相比于初始布局减少了41.9%,因此说明了提出的故障模式下电推力器布局设计优化方案的有效性与工程实用性。