火星探测陆空协同无人系统的研究发展分析
2021-01-06王涛
王 涛
(中山大学智能工程学院,广州510006)
1 引 言
早在1962年,从苏联开始,人类启动了首次火星探测任务,向火星发射了火星1 号探测器,然而该探测器在飞行至距地球一亿多公里时与地面失去联系,第一次人类探测火星任务以失败告终。直到1971年,苏联再次发射火星2 号探测器,探测器成功登陆火星表面。随后,1976年美国发射了海盗1 号和海盗2 号火星探测器,以卫星着陆器的形式降落火星表面。1997年7月4日,美国探路者号火星探测车登陆火星表面,首次执行探测任务。之后美国又陆续发射了勇气号、机遇号、好奇号和洞察者号火星车,均在火星表面成功着陆。中国于2020年7月23日成功使用长征五号大推力运载火箭把天问1 号火星探测器送往地火转移轨道,如7 个月后成功登陆火星,必将对我国未来深空行星探测任务产生深远的影响。另一方面,2020年夏天,美国NASA 再次向火星投放毅力号探测车,同时附加安装在探测车上还有一架无人机Ingenuity,用于协同地面车辆提前规划制定行进路线,以及寻找需要探索的区域。
很多火星探测的研究论著集中探讨火星大气的环境和陆地表面情况[1-3],包括对着陆火星的气动特性分析[4-9],针对火星探测地面车系统[10-16]进行研究,也有学者对火星探测无人机系统[17-19]进行了初步的技术探索研究。Balarm等[20]对NASA即将执行首次飞行任务的无人直升机的设计及全尺寸原型机测试验证进行了总结描述,火星大气层内无人飞行系统进行探测作为一种全新的探测器,将能够提供超越轨道卫星、陆地探测车的能力,可以大幅增强陆地探测安全执行任务能力,提供更远距离和可行驶区域、可探索区域的预先探索定位。我们可以称之为火星探测陆空协同无人系统。近年来,大量的研究集中在同域空间协同无人系统应用[21-25],但是,陆空协同的无人系统相关应用研究成果[26-28],对火星地面探测提供了更有前景的探测器结构。本文将从阐述对地面探测车和无人飞行器设计有重要关联的火星陆地和大气环境开始,展开对地面探测车和无人火星飞行器的研究,以及对陆空协同系统技术的研究探讨,最后给出行星探测陆空协同无人系统技术发展趋势。
2 火星环境
到目前为止,人类向火星发射了近40颗各类型的探测器,着陆探测任务仅有8 次获得成功。为了确保火星探测器成功着陆,非常有必要进行火星自然地表环境以及大气环境的研究[29-31]与模拟[4,10],用于测试火星着陆探测系统。
2.1 地面环境
从美国发射的多颗着陆探测器传回的情况总结来说,火星基本上是荒漠行星[31],其表面覆盖着松散的颗粒或砂砾石块,图1 为NASA 的机遇号传回的着陆点——毅力谷附近的火星地貌图。
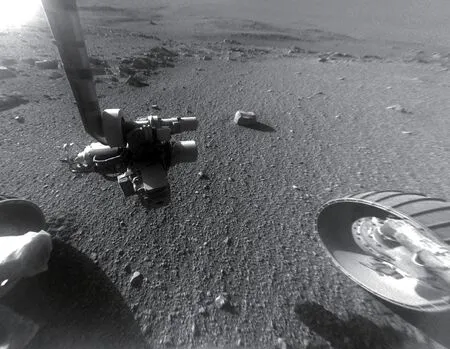
图1 NASA机遇号传回的火星地貌图Fig.1 Opportunity’s view of Martian ground texture
火星虽然是一颗地质活动并不活跃的行星,但是目前的环境探测信息显示,火星地形地貌特征具有多样性,表现为严重的坑化,有高山、峡谷、大小坑地形、盾形火山、河床、平地等,起伏跌宕,变化很大;表面严重风化,有各种沙丘;另外还有独特的极地形貌[30]。这些地形地貌与着陆探测器系统的降落地点选择紧密相联,决定了探测器行进中的危险障碍风险和可持续探测任务的能力。
另一方面,火星表面土壤表现为与月壤类似的特征[32],其颗粒直径范围比较广,表层的颗粒直径比月壤表层的颗粒直径要大,但是火星土壤密度比较小。相较于月壤,火星表层容重总体上偏小,火星土壤的内摩擦角要比月球土壤的内摩擦角小,火星土壤的承载力和月球接近,如图2和图3所示,火星土壤与月壤的松软程度比较接近,这对火星探测地面车辆系统研制具有重要的参考意义。

图2 好奇号行驶后留下土壤车辙痕迹Fig.2 Curiosity’s view of Martian dune after crossing it

图3 中国探月工程玉兔2号留下的车辙Fig.3 Yutu2’s view of the Moon’s Mare Imbrium region
火星尘埃主要组成成分为极细粒的硅酸盐颗粒物,会在火星地表随风迁移,探测器的研发需要考虑这种物质对火星探测器的光学部件可能产生的威胁以及火星探测器寿命的影响,尘埃沉积为太阳能电池板以及裸露在火星环境中的其他硬件设备的效率和寿命带来极大挑战,勇气号曾因为太阳能电池板蒙尘,电力持续下降导致供电系统瘫痪[33]。另外,火星上极有可能存在含有磁性物质的土壤和尘埃,磁性的监测也将为无人系统仪器正常工作提供重要信息。
2.2 大气环境
本文针对行星探测可能存在的陆空系统应用选择开展相关研究探讨,刘高同等[18]对火星表面大气环境特性进行了模拟仿真研究,设计合理有效的行星探测无人飞行系统亟需可靠的火星大气地面模拟装置,以提供试验基础保障。
已有的火星探测器数据表明,火星表面大气环境呈现出稀薄、干燥、严寒、风沙大、沙尘暴频繁的特点,并且处于低气压和低温状态(如图4),这些问题是火星着陆无人探测系统必须面对和克服的问题。火星表面大气压强只有地球的0.6%,而且主要成分CO2占全部气体的95.97%,大气中还夹带着大量沙尘。因此,在这种环境下,火星探测无人系统所搭载仪器与周围环境需要进行热平衡研究。
火星每天都处于一个巨大的热循环,火星温度在-110℃~+30℃的范围变化,对于探测器电子系统、机械系统等带来了严峻的挑战,风暴引起的沙尘会覆盖洞察号的太阳能电池板,使得电力不足,从而导致探测系统机械臂无法继续进行精准的操控,这些在工程设计过程中都是需要克服的问题。

图4 勇气号火星90天测温数据分布图Fig.4 Spirit recorded temperatures’change in 90 days
3 火星探测无人系统
3.1 地面探测车
行星表面深度探测中最具科学价值的信息通常来源于复杂/极端地形探测,相较于在轨飞行的探测器,小型化地面探测车成为人类执行星表探测任务的备受关注的手段[34],目前为探测月球、火星、小行星而研发的小型星表无人探测系统已经有很多代表性应用[35]。目前为止成功登陆火星的无人地面探测系统见表1。
旅居者号探测车是探路者任务使用的地面火星车,采用地面站遥控方式,地火之间通信时延使得地面人员不能实时控制旅居者号,其有限的自主体现在自主地形穿越、突发事件处理和资源管理。勇气号和机遇号的控制方式是短距离内自主导航和地面遥操作任务执行,两者的自主性实现了数小时内的无人监测、复杂地形的运动控制等。好奇号工作模式是长距离自主导航和任务遥操作,车载强大的实时软件维护能力,并在火星上行驶过程中执行高效路径规划决策,以及在采样过程中对机构实现自主精准控制[36-37]。随着多源异构传感器、车载计算机、大容量长效动力电池和自主导航控制算法的飞速发展,火星地面探测车的自主能力越来越强,可以独立自主完成复杂的科学探测任务,所需人工干预越来越少,正在向自主智能型火星车发展。尽管如此,勇气号、机遇号以及好奇号都曾经出现过探测信息不够、控制不及时导致的深陷火星坑;损坏科学仪器和车辆行走系统等问题,无法执行更多更深度的探测任务。
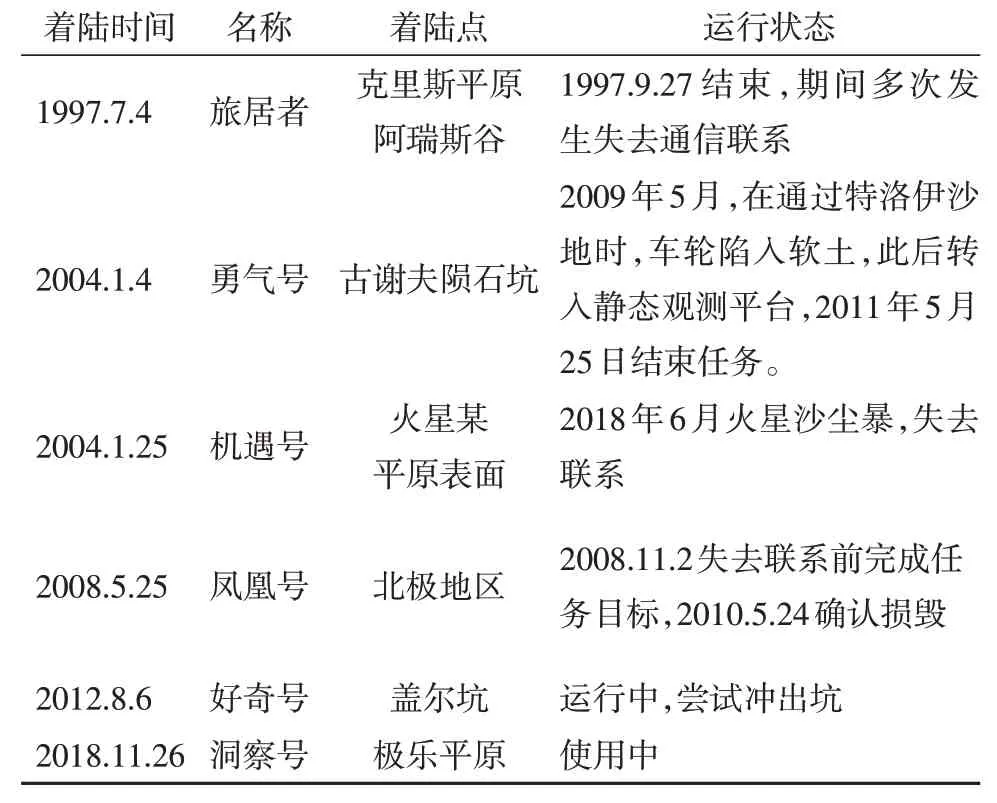
表1 已经着陆火星地面探测车系统运行状况统计表Table 1 The statistics of launched rovers on Mars
3.2 火星无人飞行系统
火星大气稀薄、环境低压,对无人火星飞行系统的设计和应用提出了巨大的挑战,虽然无人地面系统无法解决视野局限性、满足地形地貌大范围高精度测量等高价值行星探索需求的问题,火星无人飞行系统相关研究仍然备受科学与工程研制者的关注。赵鹏越等[17]对研究旋翼火星无人机特性和应用可行性进行了总结阐述,并对火星无人机的飞行气动特性和导航控制系统集成方案进行了说明。姚克明等[38-42]对火星无人机的旋翼升阻动力特性、建模、视觉景象导航以及自主任务规划与控制等关键技术进行了探索研究。Balarm等[20]对NASA即将随Mars 2020 任务实施首次火星大气层内飞行的火星直升机的技术和地面测试试验进行详细阐述。
火星旋翼直升机技术是非常令人期待的技术之一,其将完成低重力、低气压和稀薄大气内的火星飞行任务。火星无人机的质量不到1.8kg,在火星上,由于重力的不同,它将重约680g。机身和垒球差不多,它的双桨叶将穿过稀薄的火星大气层,以每分钟近3000 转的速度旋转,速度大约是陆地车的10 倍。为了应对夜间达到-90°C 的刚性火星温度,无人机还配备了可通过太阳能电池板充电的锂离子电池和加热系统。这架小型旋翼直升机安装在毅力号火星探测车的腹部,其设计目的是验证此种行星探测无人飞行系统是否可以在地球以外的地方使用,类似的设备可能在未来十年用于探索土卫六等地外行星,这将是第一架在其他星球上飞行的飞行器,在着陆后以毅力号为载机母舰进行固定。通过探测车协助寻找到合适的区域后,才会开始执行试飞任务,直升机将在30天内完成最多5次飞行测试,升空后将为毅力号提供更多可探测区域、可行驶区域以及地形地貌等相关数据,可供无人地面探测车执行安全路径规划和更高精度的导航与控制使用。

图5 火星旋翼无人直升机的结构组成示意图Fig.5 The scheme of Mars helicopter
其关键技术包括:
(1)叶片设计技术
火星引力只有地球的38%,因此无人机不需要产生与地球上相同的悬浮力。另一方面因为火星的大气密度只有地球大气层的1%。火星飞行器的飞行雷诺数(Re)约为103~104,要比地球上的飞行器的飞行雷诺数小两个量级,因此火星直升机就相当于在地面高空约30 公里上飞行[43]。火星上无人直升机的旋翼只能选择高达3000转/分的旋转速度来产生足够的升力,这对旋翼叶片的设计提出了新要求。
(2)不依赖卫星导航的导航控制技术
火星稀薄的大气导致火星无人直升机的飞行姿态调整过程比较迟缓。火星上的风、沙尘暴等也将严重影响火星无人机飞行稳定性,这要求无人机对变化的环境能够进行快速调整,以保证其飞行安全。此外,火星无人机要具备很强的自主判断和执行能力,不能完全依赖地面遥操作控制,避免通信延迟造成不可预测的事故。火星无人机飞行要能够以火星漫游车或火星卫星作为时空基准,实现自主导航定位,并能够回归无人探测车母港固定。因此,火星无人机的控制方法必须考虑低气压气动特性,具备较高的抗环境干扰能力。
(3)飞行环境安全控制技术
火星白天的温度最高可达30℃左右,但夜间温度可以降至-90℃。因此,火星无人机载各种器件必须能够经受反复的冷热交替,无人机具备可靠的机载实时热控系统,以保障控制系统正常运作。此外,火星上的沙尘暴问题导致的太阳能电池无法充电亦需要进行控制;而沙尘会导致火星直升机很薄的旋翼叶片加速磨损,从而导致飞行器寿命降低。这些都是环境安全控制技术需要考虑的。
(4)地面测试试验技术
由于火星与地球之间重力场不同、大气密度偏差巨大等问题,在地面模拟火星无人直升机在火星上的飞行环境面临重大挑战。地面试验技术要求尽可能模拟火星上直升机的运行条件,包括在真空室中模拟火星的低密度环境以及类似火星上的温度变化,以验证直升机能否在寒冷的气温下生存和正常工作。更重要的是,要真正模拟在火星上的重力场对飞行的影响,必须模拟地球三分之二的引力,要有一套重力卸载系统进行试验。试验的重点是确定直升机的推力、功率、关键系统的动力学特性和自由飞行的控制。
3.3 协同合作无人系统
无人飞行器能够用于大区域范围内的目标搜索,但是无人飞行器无法对地面目标进行精确定位与识别,另一方面,无人地面车辆系统能够用于高精度定位地面目标,但是不具备快速移动、及时有效识别前方障碍危险等能力,因此陆空协同无人系统已经成为当下应用研究的热点问题[26-28,44-48]。
过往的探测行动表明,火星的地形十分复杂,行驶漫游车太艰难,同时据火星与地球间的相对位置的不同,信号需要8~42 分钟才能实现往返,靠地面遥操作地面探测车往往由于延迟导致探测车陷入困境,甚至无法及时调整任务目标。单纯依靠火星探测地面车辆系统的火星地表探测任务出现问题时,需要空中无人系统为地表探测任务提供信息支援,从而适应复杂地外行星环境,满足行星探测动态目标任务要求,确保探测任务系统的安全,提高生存能力,更高效地完成任务。本文提出火星探测的陆空协同无人系统任务结构如图6所示。

图6 火星探测陆空协同无人系统的任务结构示意图Fig.6 Scheme of ground-aerial cooperative unmanned systems for Mars exploration
借助上述陆空协同探测系统任务结构,能实现以探测车为无人直升机母港,实现无人机的固定停靠以及时空基准定位;以无人直升机为前哨,提供协同探测共享信息,预测可行驶路径、可探索区域以及预判前方障碍危险等。无人直升机在其中扮演僚机的角色,保障火星深度探测任务执行的能力和效率。
陆空协同合作无人系统的主要关键技术包括:
(1)陆空异构系统的协同控制技术。由于无人地面系统与无人飞行系统之间存在很大的差异,目前关于多机器人系统研究成果不能直接应用于无人飞机和地面车辆系统,需要对其中展现的大量新特征进一步研究,必须处理来自两个异构平台的信息以及有效协调车和机的行为,使得相关研究更具挑战性。
(2)陆空协同导航规划。在各种环境中,飞行系统利用其视角为地面探测车提供大范围探测图像信息和通信中继等,辅助地面探测车安全导航规划,完成从起始位置到达目标位置;无人车为飞行器系统提供不依赖卫星导航条件下的时空基准,起、降、返航母平台,并为无人飞行系统提供复杂的任务规划决策解算。
(3)陆空协同的动力能源共享技术。无人飞行系统由于其恶劣的飞行环境,其动力能源系统无法提供长时有效的支持,复杂笨重的地面探测车系统可以通过能源共享管理,对无人飞行系统提供紧急动力保障,确保协同共生系统的持续生存能力。
对无人探测地面车和无人飞行器协同合作的SWOT 分析如表2。表明陆空协同合作的行星探测系统将具备无人探测车和无人飞行器所无法实现的行星探测任务能力,这也是NASA 的工程师坚持追求在火星漫游车上实施火星无人直升机试验任务的核心,有可能在未来其他行星地表探测任务中推广陆空协同合作无人系统,从而提高行星深度探测的效能。
4 发展趋势
在未来行星探测任务中,没有模板或既定的任务目标清单可以直接借鉴使用,凸显了未知复杂环境下的跨域无人系统协同合作需求的重要性,要拓展行星探测任务的地理空间域,实现无人系统跨空间域的合作与协调、综合行动互补,应对未来行星探测任务中内外活动环境的冲突威胁,努力寻求协同合作探测无人系统在速度、活动区域、探测范围、通信、保障以及有效负载能力等方面协调互补。必须从感知、认知到行为决策控制全交互协调的角度对陆空协作环境下异构无人系统协同探测、协同认知导航与控制决策问题进行研究。跨域多无人系统协同控制过程中,不同地理空间域无人平台之间存在层次关系,需要在遵循特定协同合作机制基础上,动态地获得多域协同效能的最优或非劣解,协同控制过程和影响关系复杂,具有以下技术发展特征:
(1)协同任务管理拥有开放架构的系统族,需要研究一种通用的陆空协同无人探测的系统架构,可集成多无人系统平台,实现陆空无人系统协作指控。
(2)研究行星用无人飞行系统的新型动力系统,提高飞行环境的适应生存能力,开发协同合作无人系统的能源共享技术,地面无人探测车系统作为无人飞行系统的驻泊港湾,研究自主能源保障和系统自主健康监测管理技术。
(3)无人飞行器和无人地面系统平台由于角色和任务不同,分处不同认知层次,呈现递阶-分布式结构,使用预测控制技术解决无人飞行器和无人地面车的动态任务分配和实时控制问题。
(4)陆空协同合作系统的信息为无中心分布,各地理空间域内无人平台均只拥有系统的部分信息,呈现信息分散的特点,以地面探测器或在轨运行行星探测卫星为时空基准,进行探测信息的有效融合共享。

表2 陆空协同系统相对单一探测系统的SWOT分析表Table 2 SWOT of ground-aerial cooperative unmanned systems
(5)在复杂未知的行星探测作业环境中,通信环境比较苛刻,难以保证信道随时畅通,且存在带宽受限、高丢包率、长延时等情况,呈现通信约束的特点,必须要考虑陆地探测器、空中飞行器和在轨探测卫星之间的泛网络通信问题。
(6)行星地表环境下的自主热控管理技术,需要研究陆空协同无人系统各自对环境温度的自适应调控,确保自身仪器系统正常运行,设计合理的温控系统。比如,当本体温度较低时,规划后续工作模式为通信、感知、探测等大功率模式,提高温度水平;反之,则规划后续进入小功率工作模式,并推迟大功率工作模式,降低温度水平。
(7)未来发展陆空协同行星探测系统,系统本身实现实时任务级控制必须要考虑信息过载问题,进一步采用类脑认知智能技术,利用搭载多层次传感器进行陆空无人协同系统平台的多源数据采集、分析、融合处理,并研究使用多源注意机制解决实时任务控制过程中可能出现的信息过载问题。
(8)加强行星探测过程中的导航技术,可靠的行星探测地表导航技术能够确保未来火星等行星探测任务科学价值的最大化,可以通过开发智能排序、传感器约束路径规划、自然地形视觉定位和实时状态估计来解决这一问题。
(9)陆空协同合作系统必须要考虑探测行星的地表环境、辐射以及大气气候环境,开展地面模拟环境逼近模拟试验,对陆空协同无人系统开展严苛的地面模拟测试试验,确保系统可靠运行,提高协同系统的生存能力。
5 结束语
本文针对火星探测无人系统的行星地表环境以及大气环境进行了阐述,并对环境因素对行星地表探测无人系统的影响进行了总结。然后通过对包括火星探测车的应用现状及面临的挑战问题、火星无人飞行系统的研究现状及未来技术发展进行综合分析,提出了在进行火星等行星探测任务中发展陆空多无人协同合作系统执行深度行星地表探测的需求、关键技术,并结合陆空协同无人系统的SWOT分析说明未来行星探测系统采用陆空协同系统的潜在应用价值。综合以上分析,提出了未来火星探测无人协同合作系统发展的技术特征,对关键技术研究发展方向以及试验验证研究方法设计提供了思路。
展望未来无人系统的应用发展方向,陆空协同无人探测系统的应用研究不仅能够高效完成行星地表深度探测任务,更能够在其他地球环境下的复杂动态任务中发挥多域无人系统协同合作的特有能力,进行陆地、水面/水下、空中乃至天基无人系统多域融合、协同合作,从而有效应对人类无法解决的极端任务,包括漫长边境安全管控、城市应急冲突管理乃至智能化战争等。
