基于升降平台的三维激光扫描技术应用研究
2020-12-17徐殿成
徐殿成
(中国铁路设计集团有限公司,天津 300251)
在铁路勘察设计中,里程丈量、中线测量、高程测量、横断面测量、地形测量等现状测量工作,是铁路养护维修、既有线改建及二线增建的重要环节[1]。 目前,在涉及既有铁路营业线的勘测工作中,一般是利用铁路部门给定的天窗时间,测量人员使用GNSS-RTK、全站仪、绝缘尺等仪器设备,现场采集外业数据。 这种基于单点采集的传统测量方法,不仅施测困难,而且存在申报流程慢、运营干扰大、安全风险高、作业周期长、成本支出大等缺点。
地面三维激光扫描技术是测绘领域一项革命性新技术。 该技术通过内置伺服驱动马达系统精密控制多面扫描棱镜的转动进行扫描,采用逆向三维采集和模型重构,精确获取扫描点三维坐标[2]。
地面激光扫描仪具有高精度、高效率、无接触等众多优势,被广泛应用于既有营业线测量。 已有许多学者进行了相关研究,周文明等研究如何快速提取铁路地形图[3],黄明等对多像位姿估计的全景纹理映射算法进行研究[4],徐进军等对地面三维激光扫描仪的现状与发展进行了归纳[5]。
上述研究均取得了一定的成果,但铁路既有线作业过程易受既有铁路营业线周边附属围墙、栅栏、房屋、树木等遮挡物的影响,制作的地形图难以达到预期的效果。 因此,研制专门的升降平台很有必要。 与此同时,在试验过程中通过设置不同的扫描半径和测站间距,用来研究分析地面激光扫描仪的最佳扫描半径,以提高测量精度[6]。
1 外业数据采集及成果输出
1.1 外业数据采集
通过气压式升降平台,将地面三维激光扫描仪(RIEGL VZ-1000)抬升至离地面5.0 m,一方面可有效克服围墙、栅栏、房屋、树木等遮挡物的影响,另一方面优化扫描角度[7],提高了既有铁路相关特征要素的扫描效果,扫描仪架设如图1 所示。

图1 基于升降平台的地面三维激光扫描仪架设
1.2 数据预处理
利用GNSS-RTK 采集扫描仪中心和标靶中心的三维坐标,通过REIGL 公司的RiSCAN PRO 软件进行绝对定向[8-9],并分析定向精度[10-11],该方法是利用2~3 个标靶中心的绝对坐标,使用后方交会法计算扫描仪中心的坐标,该计算坐标与采集坐标进行比较,进而分析单站定向精度。 采用此方法,单站绝对定向精度能达到毫米级,可为多站数据配准提供控制基础。单站定向结束后,将数据输出为通用的“∗.las”格式。
1.3 成果输出
利用TerraSolid 软件,对点云数据进行滤波、分类;通过数据内业处理,提取轨面、砟肩、砟脚、路肩、坡脚、围墙、接触网杆、回流线等既有铁路的勘测要素[12-13],完成小范围内既有线的地形图、横断面等勘测任务[14-15]。
配合GNSS-RTK 流动站和定向标靶,获取激光扫描的点云数据,其具体作业流程如图2 所示。
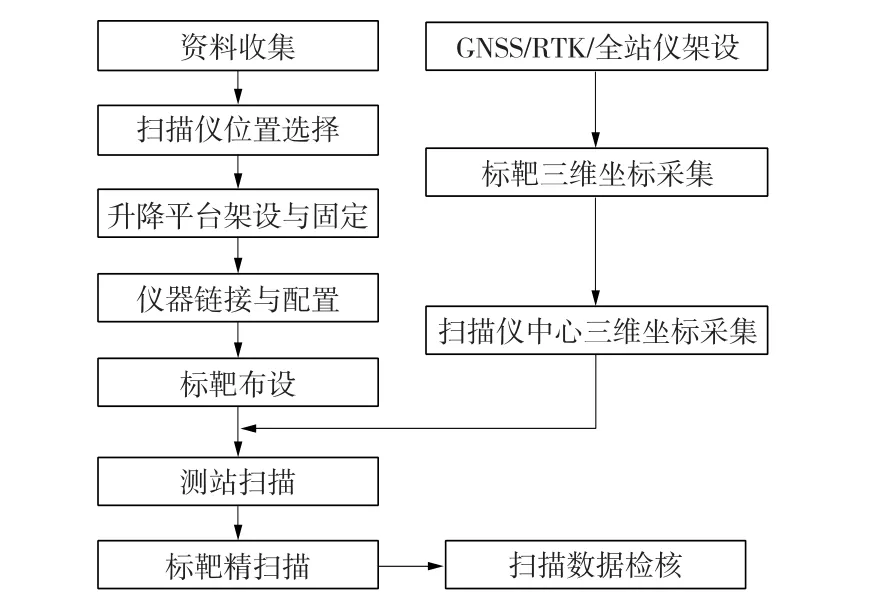
图2 基于升降平台的地面三维激光扫描仪数据采集流程
2 实例分析
选择天津某既有铁路部分地段作为本次试验的场所,该铁路为普速铁路,其两侧树木、附属房屋较多,地势坑洼不平,给选择设站位置和设置标靶带来较大困难。 按外业数据采集流程获取点云数据、标靶中心坐标等,然后通过滤波、定向、拼接、分类等内业处理,得到试验场的三维激光点云数据。 在该测量区域共架设5 个测站,通过对试验数据的比较分析,探讨基于升降平台的地面激光扫描技术的最优设站间距,以及该技术的测量精度。
2.1 点云密度分析
本次既有线扫描试验采用的地面三维激光扫描仪(RIEGL VZ-1000)最大扫描距离可达1.4 km。 受其本身扫描特性的影响,随着到测站中心的距离由近及远,单位面积内有效的地面点云数量由多变少。
在试验中,给激光扫描仪设置一定扫描分辨率(横向和纵向均为0.020 m),分析到测站中心各种距离的单位面积(1.0 m2)内激光点数量。 通过对多个扫描距离进行对比分析可知,在测站扫描半径75 m 范围内,单位面积内的激光点云数量超过100 个,基本满足既有线的测量要求(如图3、图4 所示)。
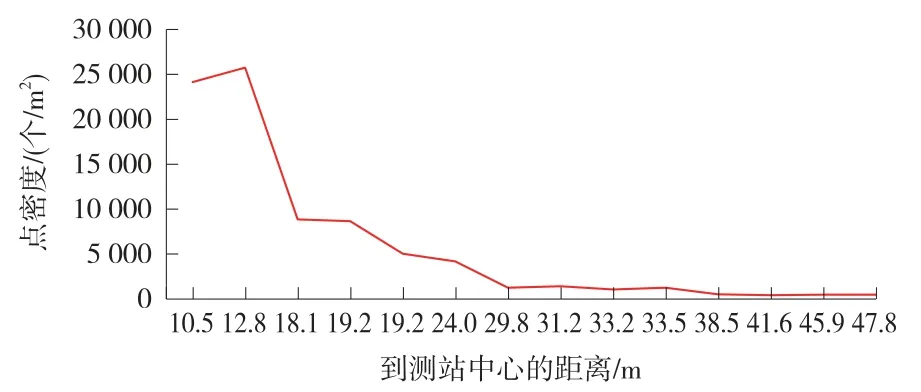
图3 单位面积内激光点云数量随扫描距离的变化(0~50 m 范围)
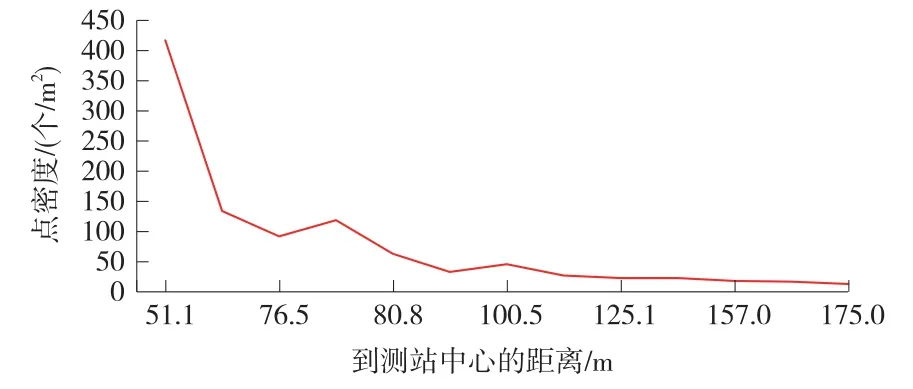
图4 单位面积内激光点云数量随扫描距离的变化(50~175 m 范围)
2.2 扫描精度分析
在本次既有线扫描试验中,利用GNSS-RTK 采集激光扫描仪安置位置(激光发射器中心)、2 ~3 个靶标(靶心)的三维坐标。 通过后方交会法,计算该测站的绝对定向参数,并分析定向精度。
由于三维激光扫描仪自身的结构特点,距离测站中心越远,激光点云的间距越大,测量精度也越低。 既有线轨面点云高程值与RTK 检核高程值差值的变化情况见表1。
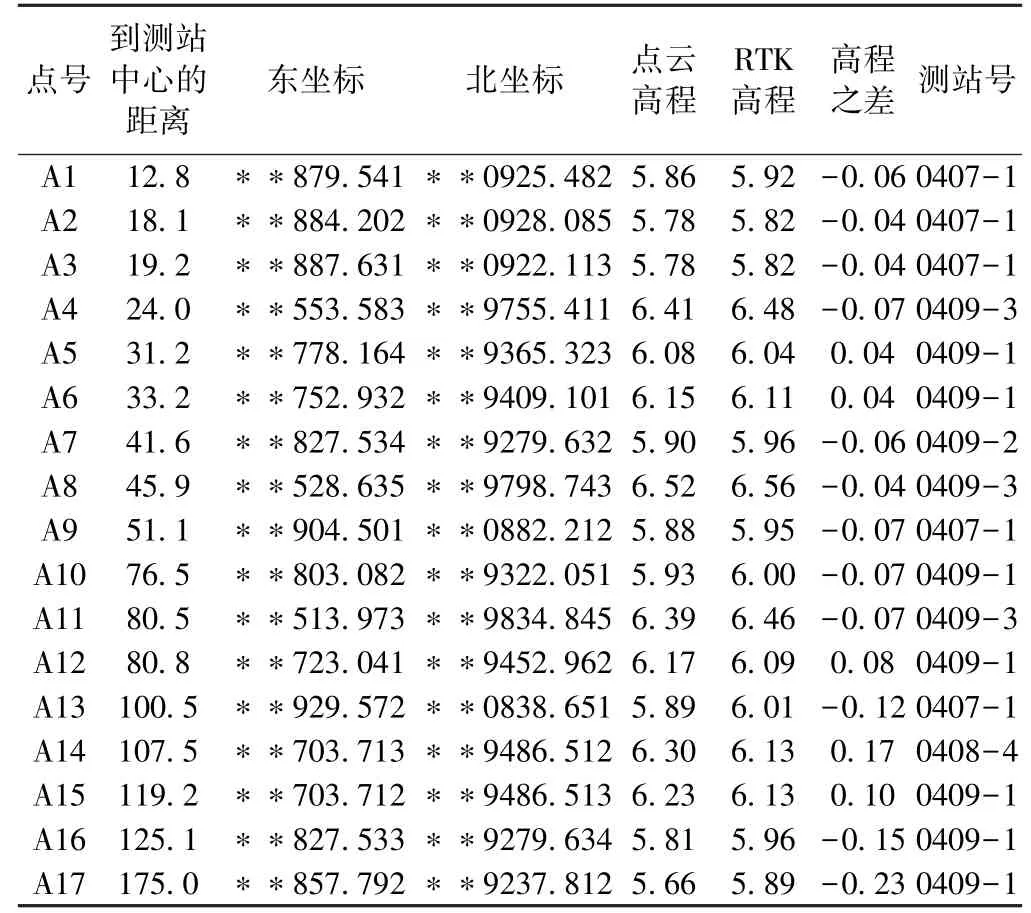
表1 既有线轨面点云高程值与RTK 高程值差值对照m
从表1 多个测站的数据统计分析中可以看出,在扫描半径175 m 之内,激光点云高程值与RTK 高程值的最大差值为0.230 m,平均差值为0.085 m;而在扫描半径75 m 之内,激光点云高程与RTK 高程值的最大差值为0.07 m,平均差值为0.053 m。
2.3 拼接精度分析
相邻不同测站的拼接有多种方式(特征点、靶标等)。 在该试验中,采用GNSS-RTK 采集关键点三维坐标拼接方式,即单个测站利用扫描仪中心和2 ~3 个靶标(靶心)的三维坐标进行绝对定向后,直接完成相邻测站的拼接工作。
在TerraSolid 软件中将不同测站点云数据赋予不同的颜色,加载后,分析相邻测站的拼接精度,如图5 所示(深色和浅色,代表两个不同的测站)。 通过比较测站间距不等的相邻测站拼接的高程精度,分析该三维激光扫描仪最优的扫描半径,其拼接精度统计如表2 所示。
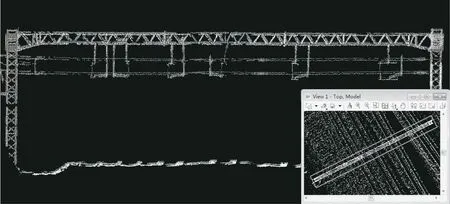
图5 相邻测站拼接示意(测站间距226.0 m)
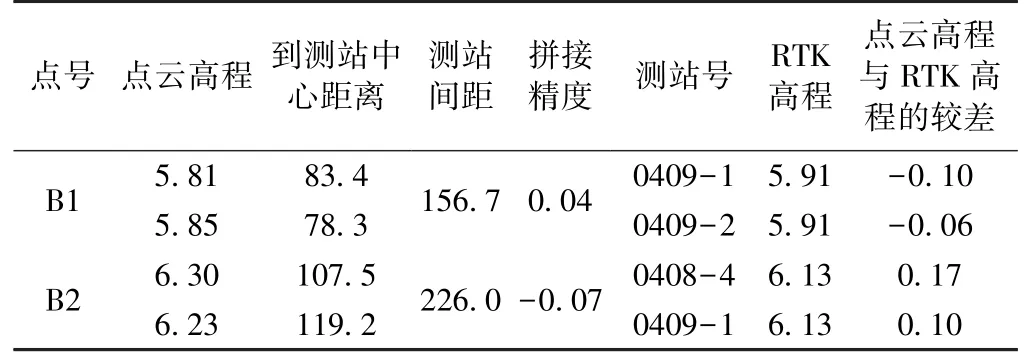
表2 测站间距不等的相邻测站拼接精度统计 m
由表2 可知,当相邻测站间距为226.0 m 时,拼接精度为-0.07 m(B2 位置);当相邻测站间距为156.7 m 时,拼接精度为0.04 m(B1 位置)。 综合分析表1 和表2 的试验数据,当测站扫描半径不大于75 m时(测站间距150 m 左右),基于升降平台的三维激光扫描技术,可以满足既有营业线的部分专项测绘要求。
3 结论
介绍了基于升降平台的三维激光扫描技术,以及在既有营业线中的相关试验。 该技术的优势在于无需申请上线作业计划,即可完成小范围内既有线的地形图、横断面等勘测任务。 通过对VZ-1000 地面激光扫描仪的点云密度、扫描精度和拼接精度的分析,确定了其最优的扫描半径,为实际生产项目提供了参考依据。
