一种适用于惯导轨检小车的全站仪自动照准方法
2020-12-17杨双旗
杨双旗
(中国铁路设计集团有限公司,天津 300251)
轨检小车的发展经历了由绝对测量、相对测量到既能测量轨道绝对位置又兼顾测量效率组合测量的过程。 为抑制惯性测量精度发散及测量轨道的绝对位置,很多学者对“相对测量+绝对测量”模式的轨道几何测量方法进行深入研究[1],主要实现方式有“全站仪+陀螺仪”、“惯导+GNSS”、“惯导+全站仪”等[5],这些研究为惯导小车的工程实现提供了理论基础。 “惯导+全站仪”模式具有不受信号干扰、精度较高等特点,在实际项目中得到广泛应用。 上述研究中,“惯导+全站仪”实现模式均为基于大角度三维坐标转换方法进行全站仪不整平设站测量,未考虑使用轨检小车辅助信息(如倾角计数据、线路设计资料等)。 因此,需先手动照准至少3 个CPIII 点后,才能进行后续测点的自动照准测量,影响外业测量的效率。 针对这一问题,基于轨检小车的原理和测量模式分析轨检小车测量过程中CPIII 坐标系、车体坐标系、全站仪坐标系之间的关系,推导出相邻测站全站仪坐标系变换关系,以解决“手动照准3 个CPIII 点”这一影响测量效率的问题;再通过实际项目采集的数据,对自动测量方法进行验证。
1 测量原理和作业模式
1.1 测量原理
在测量中,钢轨可看作一条三维空间曲线,其几何形状可用三维坐标来描述,轨道平顺性可通过钢轨的三维坐标和姿态来评估[6]。 轨检小车结构如图1 所示,惯导和全站仪与小车车体固连,小车的行走轮与钢轨始终保持刚性接触,以保证小车的轨迹线能够真实有效地反映轨道实际几何状态。 每前进一定距离后,利用CPIII 点对惯导数据进行修正,并通过里程计进行里程定位。

图1 轨检小车示意
1.2 作业模式
外业测量采用“走走停停”模式,在每一站测量中,使用全站仪不整平自由设站测量4~6 对CPIII 点,然后推行轨检小车前进2 对CPIII 点(间距约120 m),再进行下一站测量[8]。 两个测站之间重合4 个CPIII点,设站测量时,需先通过手动照准测量3 个CPIII点,进行大角度坐标旋转确定全站仪姿态,然后通过反算剩余测点的角度和距离进行自动测量[9]。
为进一步提高作业效率,通过轨检小车的倾角和里程计数据,结合线路资料,推算出相邻测站轨检小车的之间的姿态关系,实现设站时自动照准测量,免去“手动测量3 个CPIII 点”这一步骤,以提高外业测量效率。
2 自动照准方法
要实现自动照准,可将要测量的CPIII 点施工坐标转换到全站仪测量坐标系下,通过坐标反算出测点水平角和竖直角控制全站仪定位到目标点上,实现自动照准测量。 为实现该转换,可设定CPIII 施工坐标系为a(XYZ)系,车体坐标系为b(xyz)系,全站仪坐标系为c(uwv)系,各坐标系定义如图1 所示。 a 系即为CPIII 施工坐标系;b 系以车体前进方向为x 轴,车体右侧为y 轴,z 轴垂直xy 构成左手系;c 系即为测量时全站仪测量坐标系。
2.1 a 系到b 系的转换
将xy 平面绕Z 轴的旋转角设为λ,有
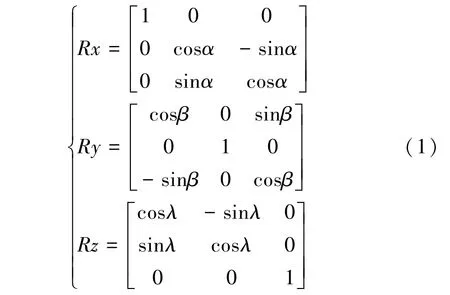
x 轴与a 系XY 平面夹角(即为线路坡度角)设为β,由于实际线路中坡度角很小,为减少计算可以设为0。 y 轴与a 系XY 平面夹角即为轨检小车此时的横向倾角,由线路在此里程时的超高(u)和设计轨距(g)计算得出,或由小车倾角传感器得出(设为α)。 故可以根据3 个旋转角构造由b 系到a 系的坐标系旋转矩阵[10-11]

轨道中心点在a 系的坐标Xa,可以根据线路设计资料和小车的里程计算出来,在b 系的坐标即为Xb(0,g/2,0),g 为轨距(可以由设计资料或小车轨距传感器得出)。 由此可以得出b 系到a 系的平移参数

根据坐标转换公式即可反算出a 系到b 系的旋转平移参数,有

由上述分析可知,此步骤的关键是获取小车测量时的里程,通过线路资料和里程可求得两个坐标系的转换关系。
2.2 b 系到c 系的转换
车体组装完毕后,全站仪固连在车体上,故整个作业测量过程中车体坐标系与全站仪测量坐标系关系不会发生变化,即b 系与c 系的转换关系固定。
通过3 个公共点坐标即可求出三维坐标转换关系[12-13],故在实际测量中,每一站测量8 个CPIII 点后,再用罗德里格公式[14-15]求得a 系和c 系的转换关系;按照2.1 节方法,可以得出a 系和b 系的转换关系,再由两个转换关系推导出b 系和c 系的转换关系。
2.3 测量流程
在第一站按常规方法测量完成后,可以分别得到4~6 对CPIII 点在a 系和c 系下的坐标以及此时测站的里程。 通过里程和曲线资料,按照2.1 节方法可以计算出此时a 系到b 系的转换关系;由测量的4 ~6 对测点坐标按照2.2 节方法算出b 系和c 系的转换关系。
在后续设站测量时,测站里程通过里程计得出,可计算出a 系到b 系的转换关系,b 系到c 系的转换关系已知,故可将要测量的CPIII 点从施工坐标系转换到全站仪坐标系,再通过坐标反算计算出全站仪坐标系下水平角和竖直角,即可控制全站仪定位到目标点上,实现自动照准测量。
2.4 项目应用
2019 年10 月,在贵广客专广西段(K278+035 ~K688+662)上下行线路平顺性测量及轨道平纵断面复测中进行了验证使用。 选取其中一次作业的3 个测站数据,根据上述方法进行计算。 表1 为设站测量时车体状态信息,根据表1 和线路设计资料可以推导出测点在下一站c 系中的坐标。 表2 为设站测量时测量的CPIII 坐标和全站仪测量坐标(只列出每站3 个测点),根据表2 可以计算出a 系和c 系的转换关系。 表3 为根据上述方法计算的测点全站仪坐标和实际测量坐标的差值。 由全站仪下的坐标可以反算出水平角和竖直角,即全站仪的水平度盘和竖直角,控制全站仪定位到目标点上。 平面和高程差值均在100 mm 以内,满足全站仪搜索目标棱镜的精度,并可以快速定位到目标棱镜上,验证了该方法的正确性。

表1 测站信息
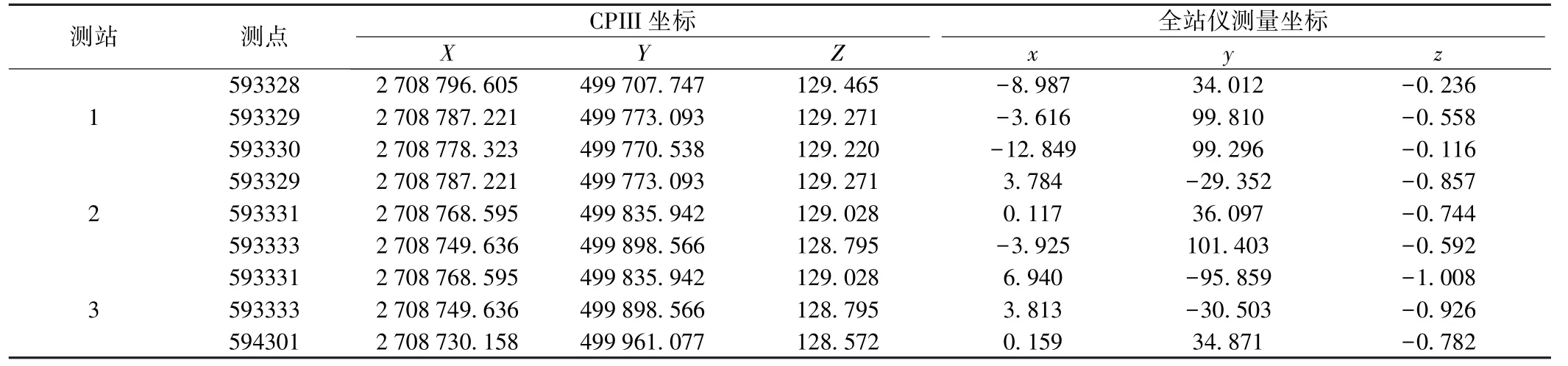
表2 测点坐标 m

表3 坐标差值
3 结语
综上所述,基于惯导的轨检小车外业测量,通过线路设计资料和车体姿态推导出全站仪瞬时姿态,并将CPIII 点的施工坐标和全站仪测量坐标进行转换,实现全站仪在后续设站测量时自动搜索照准棱镜,可节省人工操作时间,在有限的铁路天窗时间内提高测量效率,具有一定的推广价值。
