基于机载LiDAR 的像控点自动提取方法研究
2020-12-17周文明
周文明
(中国铁路设计集团有限公司,天津 300251)
1 概述
目前,机载激光雷达技术已经在铁路勘察设计中广泛应用,冯威等对机载激光雷达技术在铁路勘测设计中专题要素提取关键技术进行详细阐述[1-2];也有大量研究人员针对基于机载LiDAR 点云的横断面制作技术开展了生产实践[3-5]。 机载LiDAR 系统通常配备有数码相机,可在获取激光点云的同时获得高分辨率彩色航空影像。 一方面,影像数据可以弥补LiDAR数据纹理表现上的缺陷;另一方面, LiDAR 数据也可以提高影像目标三维几何信息的效率。 由于激光点云和影像数据之间具有很强的互补性,在道路提取、建筑物提取与建模以及横纵断面制作等领域有着广泛的应用[6-8]。
在铁路勘察设计中,利用机载激光雷达设计获取的点云与影像结合开展地形图制作已经成为常用的作业手段,这种作业方式可以省去等高线绘制和高程点提取等工序,极大提高了工作效率。 然而,在生产实践中,受数码相机安置误差等影响[9-10],获得航空影像的外方位元素易存在较大误差,导致航空影像与激光点云之间无法很好套合。 由于点云与影像精度不一致,会出现DOM 扭曲过大、平面精度降低,地形与影像错位等情况,导致三维场景平面发生移位,地形图中等高线高程点位置存在偏差等问题,这些问题的存在削弱了影像数据的可靠性。 如何借助高精度的点云数据,提高影像外方位元素的精度,是需要解决的一个重要问题。
2 像控点自动提取方法
基于机载LiDAR 点云的像控点自动提取方法包含两个主要技术:点云的分类处理与建筑物屋顶轮廓线提取。 基于TerraSolid 的像控点自动提取流程主要包括:航线匹配、重叠区删除、地面点分类、植被分类、建筑物分类、建筑物轮廓提取、建筑物轮廓修整等步骤,整个处理流程环环相扣,前面的处理工序直接影响后续的处理结果,故每个步骤的处理参数都需要详细设计。 基于机载LiDAR 点云的像控点自动提取的流程如图1 所示。
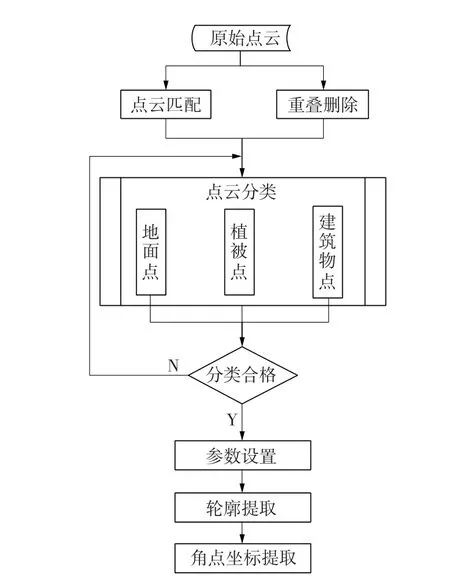
图1 机载LiDAR 点云像控点提取流程
2.1 机载LiDAR 点云的高精度分类
点云分类主要将地面点、植被点与建筑物点进行分类,其中,地面点与植被点分类主要为建筑物点的分类提供基础,而建筑物点分离主要用于后续建筑物轮廓的提取,进而提取房屋角点坐标。 TerraSolid 软件中的点云分类方法采用Axelsson 改进的迭代不规则三角网算法[11-13]:先将区域的点云数据构建一个初步的不规则三角网,通过配置相关参数(格网大小、分类区最大建筑物长度),设定合理的阈值参数,将满足阈值的点云归入地面点,并不断更新初始格网;然后根据新构建的三角网计算新的阈值条件,经过不断的迭代计算,对所有的未滤波的点云进行条件判断;最终实现所有的点云滤波分类。
(1)地面点与植被点分类
分离地面点是整个分类过程中最重要的一步,当地形条件比较复杂时,应限制点云分块的尺寸。 地面点分类的基本思路是:首先选择分类区中高程较低的点,并设定迭代窗口的尺寸,以确定该窗口范围内至少存在一个地面点,同时考虑分类范围内最大建筑物尺寸,保证最大建筑物尺寸范围内的最低点为地面点。如果处理区域为山地,则建筑物覆盖面较小,可以将相关阈值调低,如果参数设置过大,容易将山顶地面点误分为其他类别,导致山体失真;如果处理区域为城区,可将建筑物尺寸参数设置大一些,以避免无地面点情况。 因此,在不同地形条件下应设置不同的分类参数,并经过反复试验,以得到最优的分类结果。
点云分类中,一般将植被点分为三类,分别为低植被、中等植被与高植被,其中,高植被中地物明显高于地面,该类别中还包括建筑物及电力线等地物。 植被分类的具体思想为:对分类后的地面点构建一个初始的三角面模型,将其他类别的点云与该三角面模型进行比较,根据高差值的区间范围,将地面点外的其他点云列入为三种不同高度的植被图层。
按照上述点云分类流程,可以实现点云的全自动分类,图2、图3 为分类后的点云结果。
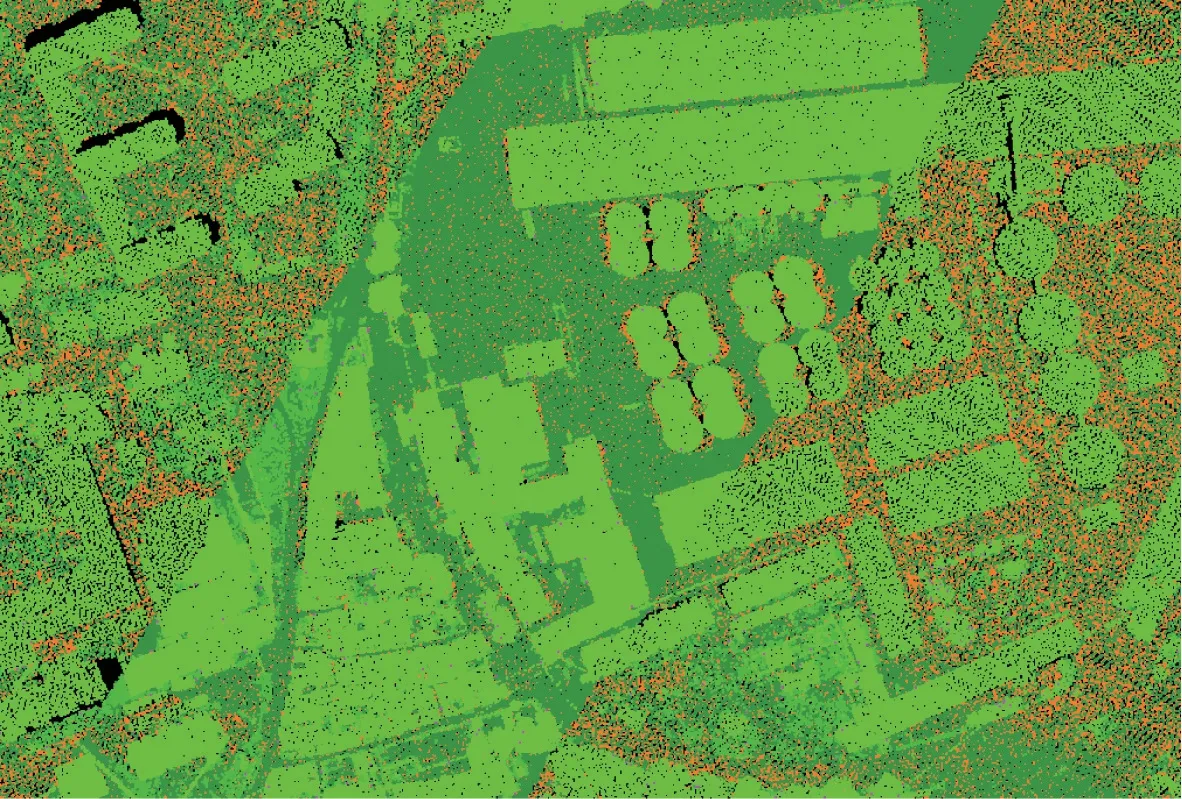
图2 地面点和植被点分类结果(橘色为地面点,绿色为植被点)
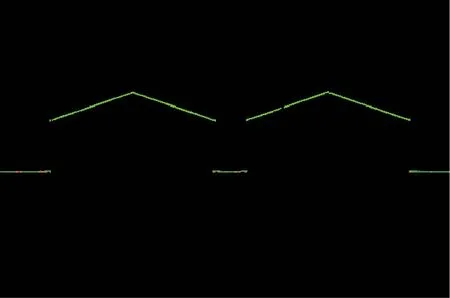
图3 分类结果剖面
(2)建筑物点分类
基于经过地面点和植被点分类后的成果,对点云中的建筑物点进行分类,建筑物点云分类精度直接关系轮廓提取,其分类参数设计非常关键。 在生产应用中,一般认为建筑物高度大于3 m,利用上一步骤的分类结果,可以将建筑物从高植被类中提取出来。 针对规则建筑物来说,屋顶点云基本在一个平面上。 如果考虑屋顶不规则,或者屋顶变形,可以在参数中设置高程方向的阈值范围,以优化建筑物分类结果。
应根据不同的点云密度、质量及不同建筑物的形状设置不同参数,在具体的项目过程中,为获取相对准确的建筑物点云数据,需要反复调试不同的参数。 建筑物点云分类成果如图4、图5 所示,其中,红色点云为建筑物,橘红色点云为地面点,绿色点云为低矮植被与中等植被。
2.2 建筑物轮廓矢量化与房角点提取
经过点云分类后,即可充分利用分类后的地面和建筑物的高程信息,实现建筑物轮廓的矢量化。 根据不同项目点云的数据情况,对点云间隔、平面容差、最小建筑物面积进行合理设置,如果需要比较详细的房屋轮廓信息,局部最小面积的参数可以相应减小,但会增加数据处理的时间。 经过该步骤,可以提取整个区域的建筑物外部轮廓和内部结构信息[14-16],具体结果如图6 所示。 利用点云提取的建筑物轮廓信息具有三维坐标。 因此,外部轮廓可采用三维立体模型的方式展示,为后续房角点位置精确确定提供更形象化的展示,同时将提取的建筑物三维模型应用于批量自动化建模中。 其三维立体显示与三维模型如图7、图8所示。
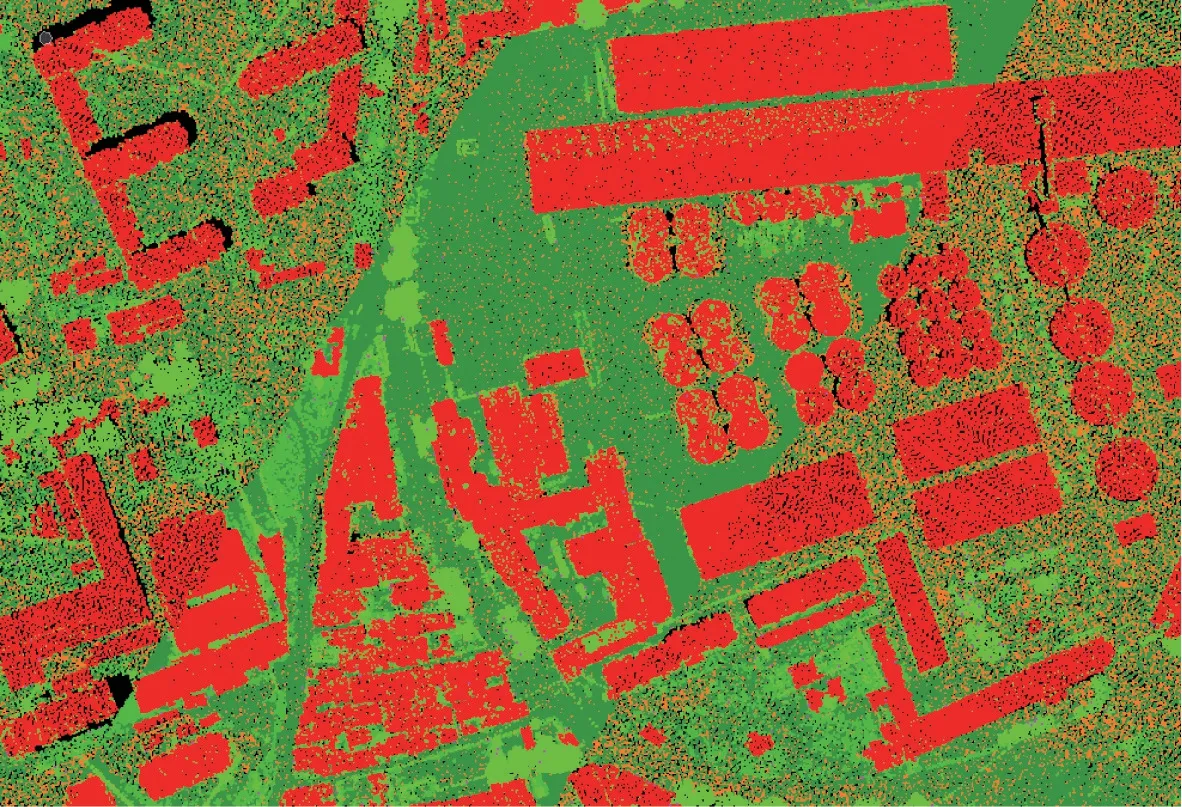
图4 建筑物点云分类后成果
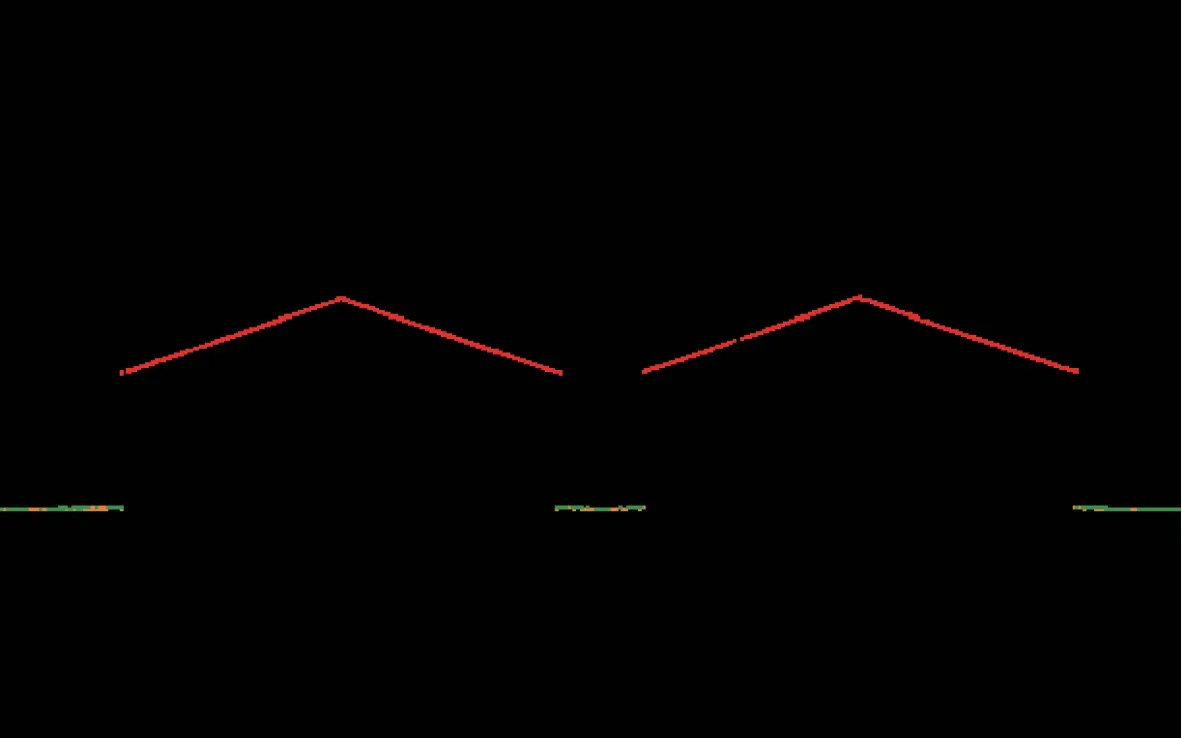
图5 分类结果剖面
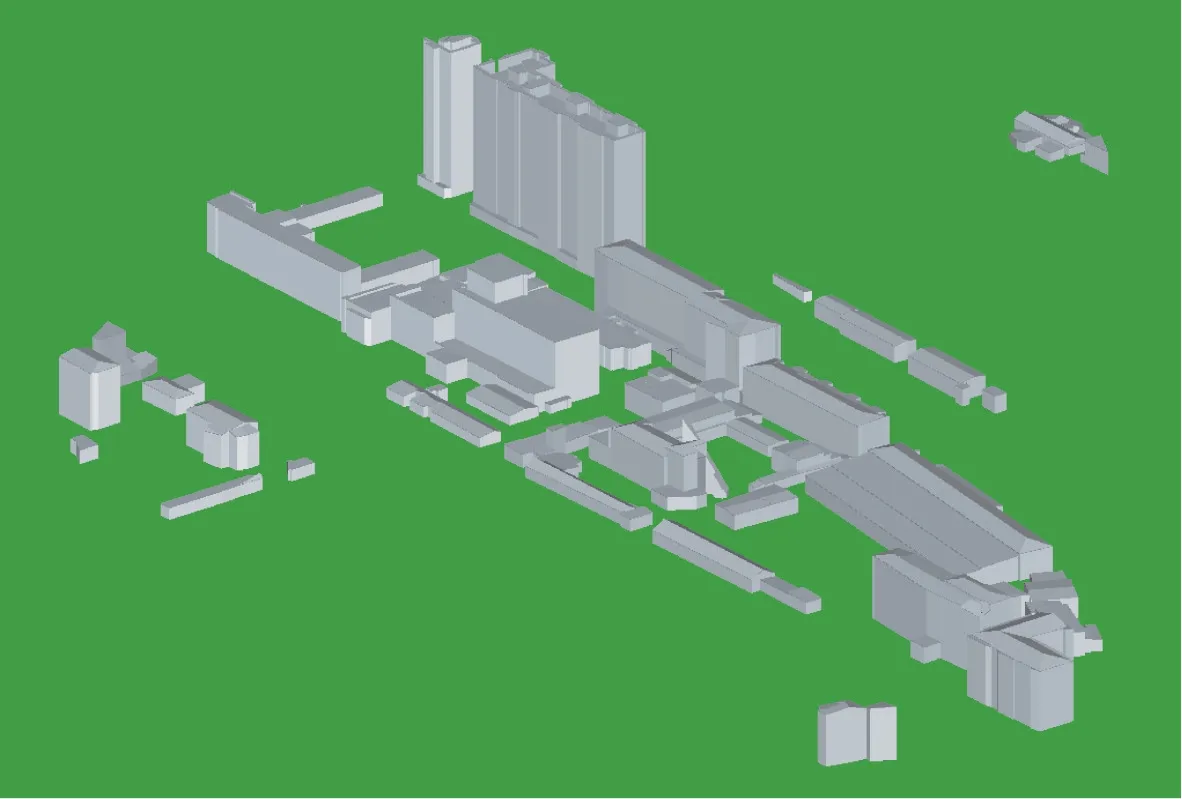
图8 建筑物三维模型展示
将生成的矢量边界导出(DXF 格式),根据航飞范围的影像外方位元素,确定像控点的目标位置,将目标位置与自动生成的建筑物房屋矢量叠加显示,提取目标范围内的三维坐标,并将每个像控点坐标记录在表格中,为后续的空三加密工序提供控制点成果。
3 精度对比分析
为真实评价该方法提取房角像控点的精度,以国外某铁路航飞项目为试验区,该铁路位于南美洲境内,线路全长约400 km,80%以上线路经过区域属于山地,地形起伏较大、沟谷纵横,以森林、林地、牧场、耕地为主,70%以上区域植被非常茂密。 采用OPTECH 设备获取的点云数据,分别按照传统手动提取像控点方法和自动方法提取项目中有实测像控点位置的房角点,并将两种方法提取的坐标与外业实测数据进行对比分析。
(1)像控点坐标提取
首先对点云进行精细分类,对于每个目标位置,分别采用自动方法与传统手动方式提取房角点坐标;然后将实测像控点坐标、手动提取坐标与自动提取坐标进行对比。 实验中,共选择33 处位置作为研究对象,选择的33 个房角点坐标均采用GPS 快速静态方式进行实地观测。 图9(a)、图9(b)为基于点云数据采用自动方法识别建筑物轮廓的示例。 不同方法获取的房角点坐标信息如表1 和图10 所示。
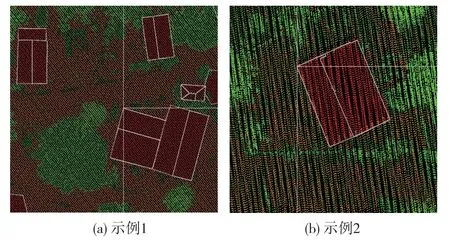
图9 建筑物轮廓自动矢量化示例
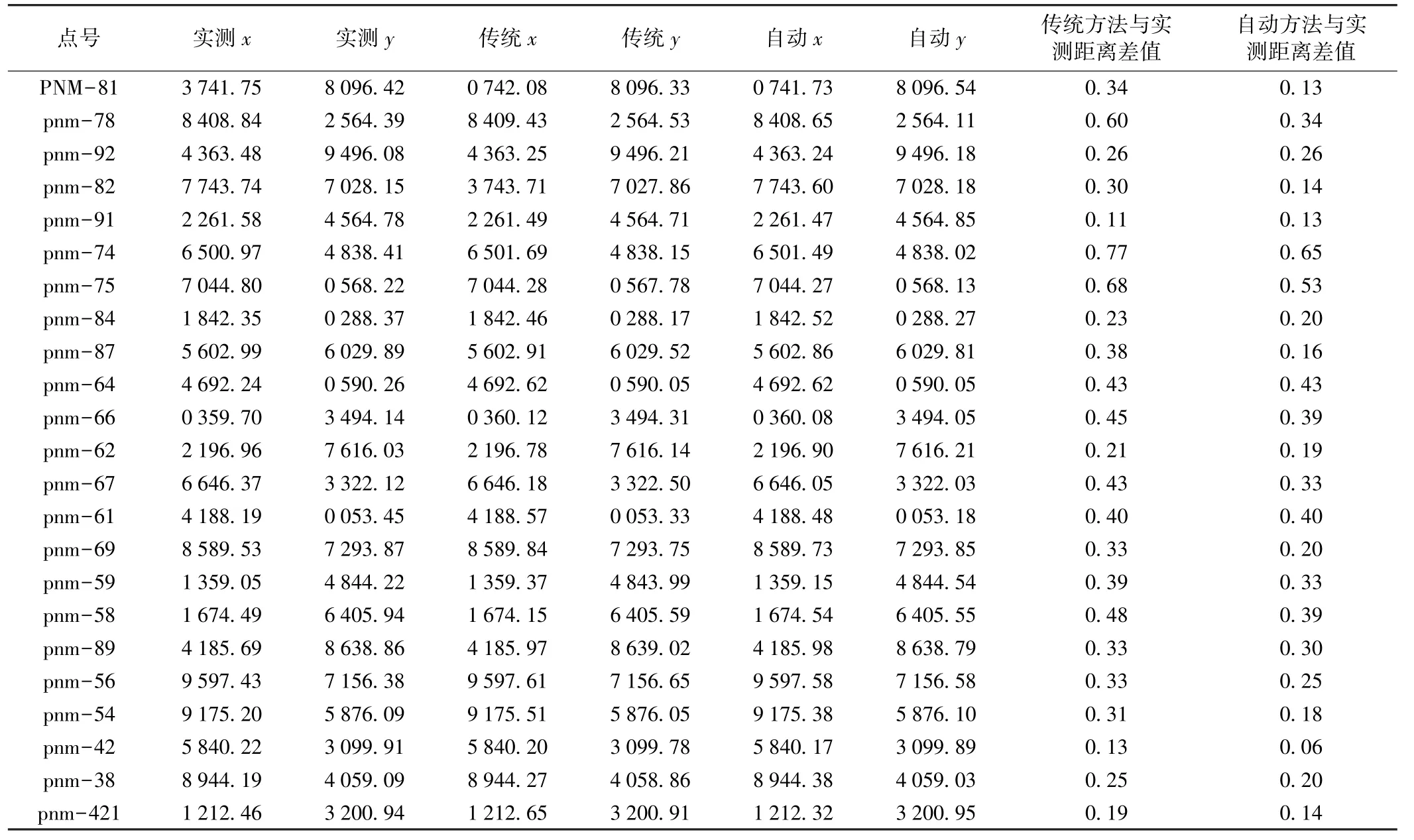
表1 实测坐标与手动/自动提取坐标对比 m
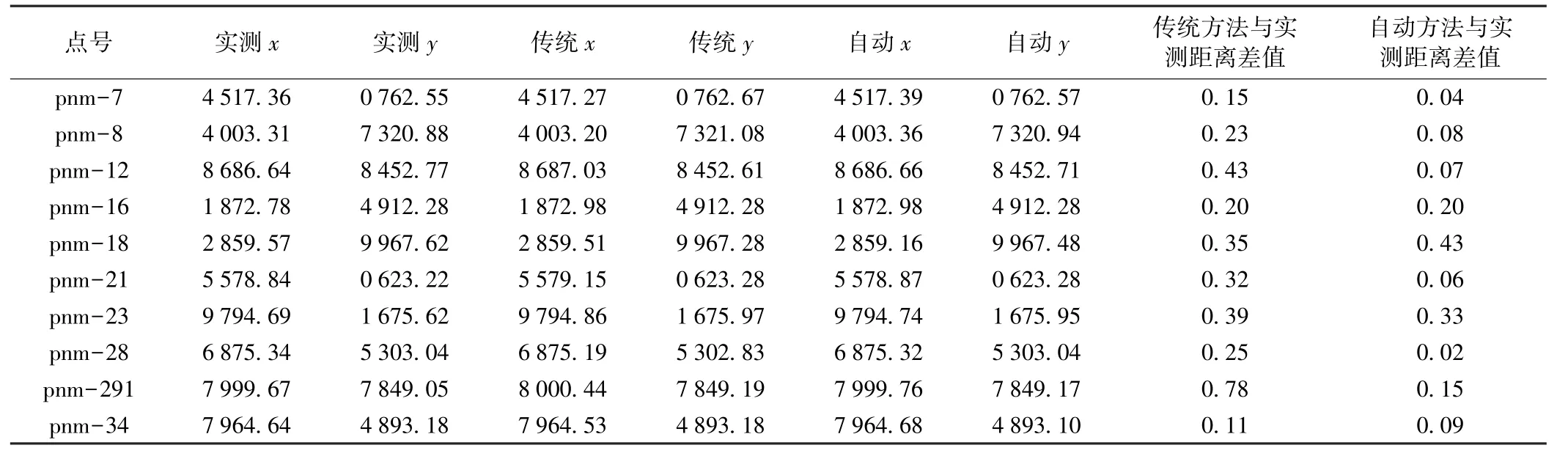
续表1
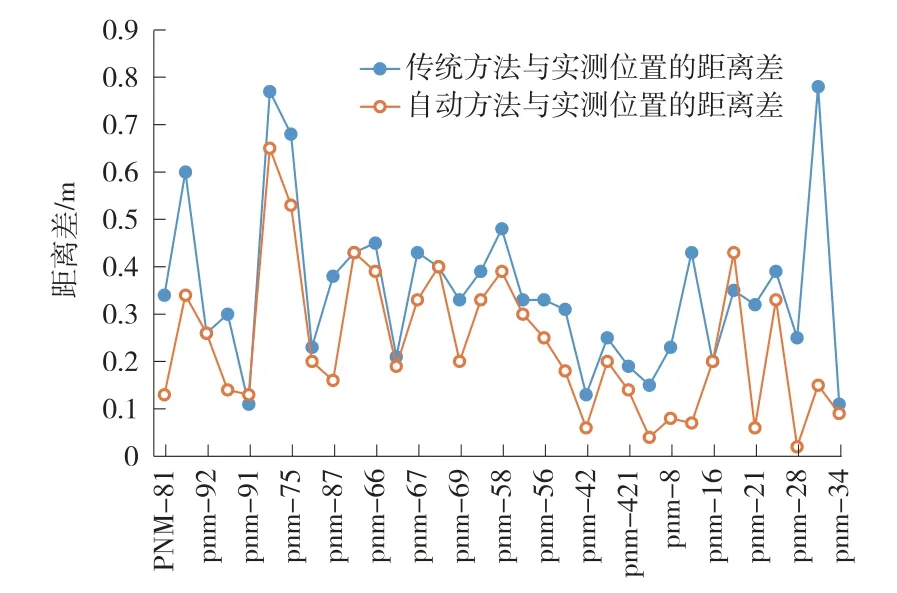
图10 两种方法提取坐标与实测的距离差统计
根据表1 和图10 的数据,计算了手动方法提取像控点坐标与实测坐标的差值,两者差值的均值为0.35 m,中误差为0.39 m;自动方法提取的像控点与实测坐标两者差值的均值为0.24 m,中误差为0.28 m。
(2)综合评价
在精度方面,根据两种方法提取的像控点坐标与实测数据对比分析发现,自动方法与实测像控点坐标差值的中误差为0.28 m,手动方法与实测像控点坐标差值的中误差为0.39 m,自动方法较手动方法提取的坐标精度提高0.1 m 左右。 采用自动方法提取的房角点坐标与实测数据仍存在一定差值,除了自动方法在提取精度方面的原因外,点云的平面位置精度、点云的密度(影响较大)都是重要的影响因素。
在提取效率方面,两种作业方式均需要对点云数据进行精细分类,故在点云分类步骤两者的作业效率一致;在后续的房角点坐标提取中,手动方法需要采用手动矢量化建筑物边界,交汇出房角点或采用剖面线的方式识别房角点坐标;而自动方式无需过多的人工参与,只需设置合理的参数,即可完成建筑物边界矢量化,能够同时获取建筑物多个房角点位置,提供了更多的像控点选择。 两种方法作业效率如表2 所示,可以发现,自动方法比手动方法的作业效率能够提高50%以上。

表2 两种方法作业效率比较
4 结论
针对机载LiDAR 在铁路工程应用中点云与影像平面位置精度不一致问题,基于高精度分类的点云数据,采用自动提取航飞范围内的建筑物矢量方法,将建筑物角点作为像控点应用于影像空三加密工序中。 通过生产项目验证,采用自动方法提取像控点平面位置精度较传统手动方式提高0.1 m 左右,作业效率提高50%以上。 目前,该工序已经广泛应用于铁路机载LiDAR 生产项目中,提高了内业生产效率,产生了显著的经济效益。
