无人驾驶汽车周边车辆行为识别算法研究*
2020-12-08蔡英凤邰康盛李祎承
蔡英凤,邰康盛,王 海,李祎承,陈 龙
(1.江苏大学汽车工程研究院,镇江 212013; 2.江苏大学汽车与交通工程学院,镇江 212013)
前言
智能化是国际汽车产业的主要发展方向,对于提升交通运输系统的高效性、安全性、节能性等具有重要作用[1]。 智能车辆利用自车传感器或者车车协同、车路协同等完成行驶环境的感知识别。 其中,周边车辆目标的驾驶行为识别是环境感知的重要内容,属于高层次环境感知的范畴。 在智能车辆动态运行过程中,对周围车辆行为的可靠估计可帮助智能车辆制定合理高效的规划轨迹和决策控制,从而确保驾驶安全而不会失去太多舒适感或过于保守[2]。 由于真实交通环境复杂多变,以及交通主体行为具有随机性和不可预测性的特点,对周围车辆行为的识别仍然是构建无人驾驶系统的难点。例如,每个交通环境参与者的最终目标、驾驶风格以及驾驶状态存在较大差异,即使在相同的驾驶环境下决策选择也有可能不同,从而导致车辆行为在较长时间范围内难以推测。 尽管存在这些难点,但仍然有下列条件使它成为一个能够解决的实际问题:
(1)同一种典型的周边车辆行为,其行驶轨迹具有一定的相似性;
(2)结构化道路有明确的车道结构和运动方向,车辆行为可通过一些可观测的历史数据去推测。
在车辆行为分析的研究方面,学者们不断进行探索研究,常见的方法可分为两种:基于逻辑规则的算法和基于机器学习的算法。 基于逻辑规则的算法可通过相对简单的专家规则推断车辆将来可能发生的行为,如间隙选择换道预测模型[3]和个性化换道最小安全距离模型,这类方法对车辆行为的推断具有较强的解释性,但对数据的稳定性和完整性有较高的要求,泛化效果较差,难以在实际路况中得到有效运用。 目前主流的车辆行为识别方法是基于机器学习的方法,如贝叶斯网络(BN)、支持向量机(SVM)、隐马尔科夫模型(HMM)等。 党彤[4]基于节点序优化建立了多特征贝叶斯行为分类模型,计算不同车辆行为的概率,但该方法需在周边车辆的完整行为过程结束后才能进行识别,无法满足智能车辆动态行驶过程中的轨迹规划与决策控制需求。 祝俪菱等[5]提出了一种基于SVM 的车辆行驶状态识别方法,通过将低维空间线性不可分的样本映射至高维空间,在二分类问题上有显著的优势,能很好地反映样本的类间差异性,但该类方法忽略了时间序列的渐近性特征,无法反映车辆行为序列的连贯性属性。 隐马尔科夫模型,由于具备强大的时序建模能力,能很好地贴合车辆行为特征,受到学术界的广泛关注,如李建平等[6]为不同车辆行为整体构建HMM 模型来学习车辆的连续特征, Geng 等[7]分别为每个驾驶行为建立HMM 模型进行分类,还有其他学者对模型进行了改进,有 HHMM[8]、HMMSVM[9]、GM-HMM[10]、GA-HMM[11]、HMM-BN[12]等模型,进一步提高了识别精度,但现有基于隐马尔科夫模型的车辆行为识别方法大多假设车辆未来的状态独立于一切过去的状态,且状态变化的概率是固定的,完全忽略了上下文特征信息之间的关联性,在车辆行为分析方面面临瓶颈。 同时,针对实际交通场景下的周边车辆行为识别,基于机器学习的方法常常将车辆作为单一个体开展研究,忽略了目标车辆处于交通网络中的社交信息,即邻域车辆群体之间的交互影响。
随着深度学习的发展,众多具有优异表现的深度神经网络架构(DNN),例如递归神经网络架构(RNN),被广泛用于时间序列数据分析领域。 RNN将时序的概念引入到网络结构设计中,隐藏层之间的互连结构反映出时间序列之间的相互影响关系,对于解决具有邻域社交信息的序列分析具有重要研究价值。 然而RNN 存在着梯度消失、梯度爆炸和长期记忆能力不足等问题,对较长时间跨度的车辆行为序列误检率较高。 长短期记忆神经网络(LSTM)模型是RNN 的一种变体,它通过在网络中加入细胞结构,在语音识别、机器翻译、风电预测等[13-15]领域取得一系列重大突破,有学者开始考虑将此模型应用到车辆和行人的行为分析上。 季学武等[16]利用LSTM 模型构建车辆意图识别模块,Alahi 等[17]还将LSTM 网络应用到行人意图理解的问题上。 LSTM模型不再停留在简单的车辆特征序列的匹配上,而是进一步深入到车辆行为语义理解的层次,能够抓住长远的上下文信息,具有出色的非线性拟合能力和抽象挖掘能力。 但是,现有车辆行为LSTM 识别算法中通常是将最后时步的隐含层状态值或各时步的隐含层状态值的平均值作为车辆行为分类的高级表达依据,缺乏每个时刻特征对识别结果贡献程度差异性的考虑,从而导致部分信息在隐层单元数据的传递过程中丢失,这使得在复杂交通环境中,周边车辆行为识别算法的识别精度无法达到理想要求。
针对上述现有车辆行为方法识别精度不高、未考虑目标车辆的邻域交通场景信息的问题,本文中提出了一种引入周边目标车辆社交特征的注意力长短时记忆网络模型(SLSTMAT)的无人驾驶周边车辆行为识别算法,以提高无人驾驶对周边车辆行为的识别精度和实时性。 其中,模型输入特征中包括交通场景中目标车辆、道路及邻域车辆的信息,来模拟交通场景对目标车辆决策的影响,并对社交特征进行卷积操作处理(CNN),降低该部分信息的数据维度并提取有效信息,以提高识别算法的实时性。算法模型采用正反双向结构LSTM 网络为主体框架,并在LSTM 网络中引入注意力机制对各时步下LSTM 单元输出进行加权,以此作为最终行为推测的依据,从而增强各时步下特征的有效性和避免网络特征信息损失。
本文中主要贡献:(1)将车辆行为识别问题转化为深度学习中的序列学习与分类问题,利用交通场景的低级时序信息表征周边目标车辆行为的高级语义信息;(2)在无人驾驶周边车辆行为算法中考虑了目标车辆的邻域交通信息,实现交通主体之间的相互关联,并将目标车辆的社交特征输入到卷积神经网络提取出有效信息;(3)搭建了以LSTM 网络为主体的识别算法模型,引入注意力机制,提高算法的识别精度;(4)将实车采集和HighD Dataset 的车辆自然轨迹数据进行预处理生成训练和测试样本集,对所提出的无人驾驶周边车辆识别算法进行验证。
1 模型理论基础
1.1 卷积神经网络
卷积神经网络(CNN)模型采用局部连接和权重共享的方式,对原始数据进行更高层次和更抽象的处理,能够有效自动提取数据中的内部特征。 其内部神经网络层主要由卷积层、池化层和全连接层等组成,CNN 结构如图1 所示。 此结构减少了权重的数量,降低了网络模型的复杂度。 模型通过使用卷积层和池化层获取有效信息,自动提取数据中的特征向量,有效降低了特征提取和数据重构的复杂度,提高了数据特征质量,针对邻域车辆信息带来的数据维度扩展,CNN 可为提取出目标车辆社交特征中较为重要的特征和保证算法实时性打下基础。
1.2 长短时记忆网络
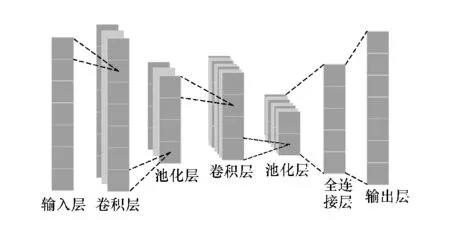
图1 CNN 结构图
LSTM 的经典结构是由 Hochreiter 和 Schmidhuber 于 1997 年提出,每个 LSTM 由 1 个单元和 3 个门组成,包括记忆单元、输入门、遗忘门和输出门,LSTM 单元结构如图2 所示。

图2 LSTM 单元结构
图中t为时间步长(t∈[1,n],n为时间步长的总数),t时刻下记忆单元ct通过自我重复连接记忆前一时步的单元状态,it输入门控制输入、激活流入内部单元状态,输出门ot控制输出、激活流入LSTM 单元输出,遗忘门ft缩放记忆单元状态,使LSTM 能够自适应地忘记或重置记忆单元的存储值。 因此,LSTM 自然能够学习输入序列的长期和短期依赖性,使LSTM 适用于解决高度动态的周车行为识别任务。 设LSTM 网络的输入量为

变量之间的关系可描述为
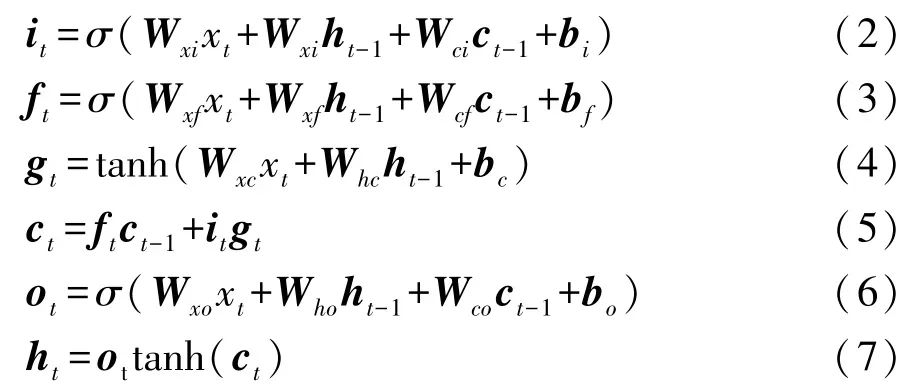
式中:gt为t时刻输入到记忆单元前的备选状态;Wxi、Wxf、Wci、Wcf、Wxc、Whc、Wxo、Who、Wco为网络各部分之间的连接权值矩阵;bi、bf、bc、bo为偏置量;ht-1为t-1 时刻的隐藏层状态;σ为 sigmoid 函数;tanh为双曲正切激活函数。
1.3 注意力机制
注意力机制(Attention)是一种模拟人脑注意力的模型,借鉴了人脑在某个特定时刻对事物的注意力会集中到特定的地方,而减少甚至是忽略对其他部分的注意力。 针对序列分析问题时,Attention 通过对序列特征赋予不同的权重,通过概率分配的方式让模型在训练过程中知道数据中哪一部分信息是重要的,从而使模型高度关注这些信息,提高模型的准确率,而且不会增加计算和存储成本。 因此将Attention 机制引入LSTM 模型中,有效突出影响周边车辆行为的因素,从而改善识别效果,Attention 结构如图3 所示。 图中,xt(t∈[1,n]) 表示 LSTM 网络的输入,ht(t∈[1,n]) 对应于每一个输入通过 LSTM 得到的隐藏层输出,αt(t∈[1,n]) 为 Attention 机制对LSTM 隐藏层输出的注意力概率分布值,y为引入Attention 机制的LSTM 网络输出。

图3 Attention 机制结构
2 周边车辆行为识别算法
2.1 车辆社交特征
无论是自动驾驶系统还是人类驾驶员,车辆行为的生成机制都是从意图需求和预期收益开始,这就会受到周围其他车辆的交互影响。 显然,需要额外的信息来减少未来的不确定性。 针对识别问题,为了让模型更好地理解这种交互作用,最终得出的行为识别概率分布将取决于目标车辆的轨迹历史和周围车辆在每一时刻的行驶轨迹。 因此,算法的特征数据包括被识别车辆本身及其环境的信息,车辆社交特征集合可表示为

对于目前的智能车而言,能够获得周围交通车信息的方式有两种:车载传感器和车联网。 车联网技术可以为行为识别带来非常有价值的先验信息,比如把驾驶员意图或驾驶系统决策结果甚至是未来的行驶轨迹直接发送给其他车辆。 目前交通环境下绝大多数汽车还未配备车联网技术,考虑到数据传输的鲁棒性和安全性,现今区域内车车通信网络还需进一步完善才能对交通产生有利的促进作用。 考虑周围车辆的特征信息,是主车在没有车联网提供先验信息的条件下,能够仅仅依赖车载传感器获取到的,由此识别算法所使用能够表征车辆行为的目标车辆社交特征,如图4 所示,位于中心位置的车辆为目标车辆,其余为该车的邻域车辆。
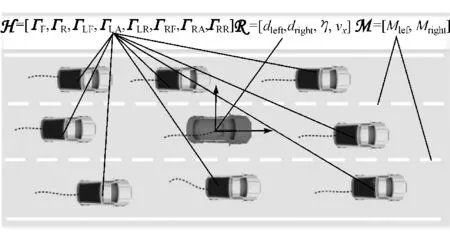
图4 表征目标车辆行为的社交特征
定义目标车辆的状态信息:

式中:dleft和dright分别为目标车辆与左右车道线的横向距离;η为目标车辆的航向角;vx为目标车辆的横向速度。
将被识别车辆的周围8 辆车作为其交互影响对象,研究时所关注的车辆集合定义为

式中:ΓF,ΓR,ΓLF,ΓLA,ΓLR,ΓRF,ΓRA,ΓRR分别为被识别车辆前方、后方、左前、左邻、左后、右前、右邻、右后方的车辆。
对每辆目标邻域车辆的位置与速度信息,定义

式中: Δxi为i位置车辆与目标车辆的横向相对距离;Δyi为i位置车辆与目标车辆的纵向相对距离;Δvi为i位置车辆与目标车辆相对纵向速度。
对于车道信息,定义

式中:Mleft为左车道标志位,当目标车辆左侧有车道存在时置为1,否则为0;Mright为右车道标志位,当目标车辆右侧有车道存在时置为1,否则为0。
车辆的行为都是对一段连续的驾驶过程而言的,单一时刻的观测量无法对车辆行为进行判断,所以,采用动态滑动时窗的方法来获取车辆的历史轨迹特征作为算法的输入量,在每个时刻t下,以Δtc为时间间隔采样轨迹上的多个特征点组成。
2.2 识别模型结构
现实交通场景中各车辆的行为具有多样性和不确定性,直接输出周围目标车辆行为的标签往往是不能够被决策模块有效使用,甚至会误导造成错误的规划,因此为了给智能车辆提供完备信息,通过识别模型推测计算出车辆不同典型行为的概率。 与许多相关研究类似,需要重点关注于车辆在侧向上的行为,因为其相对于纵向行为,它更难以直接观测到。S=(s1,s2,s3)为周边目标行为识别的类别向量,s1、s2和s3分别对应左换道(LCL)、保持车道(LK)和右换道(LCR)3 种典型行为;Y= (w1,w2,w3)为模型的输出向量,wi分别代表各个行为类别的概率值,则目标车辆行为的概率计算可表达为wi=P(si|I),i=1,2,3,I为算法的原始特征输入量。 所提出的无人驾驶周边车辆行为识别算法框架如图5所示,主要由特征提取层、LSTM 网络层、Attention 层和输出层组成。 目标车辆的社交特征作为输入,通过动态滑动时窗的方法提取,设计卷积操作、池化处理使目标车辆社交特征信息深度增加与特征降维,与目标车辆自身信息、车道信息共同组成后续层的输入量。 LSTM 层与Attention 层从所提特征中学习车辆行为的变化规律以实现识别功能,最后通过输出层得到识别结果。
算法模型的描述如下。

图5 所提出的周边车辆行为识别算法SLSTMAT 框架
(1)特征提取层。 算法输入为周边目标车辆可观测的历史状态信息组成的原始社交特征I=[O1,…,OT-1,OT],T表示动态滑动时窗的大小。 根据目标车辆社交特征的特点,构建由2 个卷积层、1 个池化层、1 个Flatten 层组成的 CNN 框架,将卷积层设计为一维卷积(Conv1D),并选取ReLU 激活函数进行激活,卷积层1 和卷积层2 卷积核大小皆为3,个数为64。

式中:C1、C2分别为卷积层 1、卷积层 2 的输出;W1、W2为权重矩阵;b1、b2为偏置;⊗为卷积操作。
为保留更多数据波动信息,池化层选取一维最大池化(MaxPooling1D):

式中:P3为池化层输出;函数max 表示池化操作;b3为偏置量。
经过卷积层和池化层的处理后原始数据被映射到隐层特征空间,搭建Flatten 层将池化后提取得到特征向量。 特征输出层的输出长度为l,可表示为HC =[hc1,hc2,…,hcl]。
(2)LSTM 层。 传统LSTM 网络是从左到右的单向传递,只能获得上文的信息,而不能将下文的信息传递给上层,然而车辆行为当前时刻的输入不仅依赖之前的轨迹帧,还依赖于之后的轨迹帧。 因此,采用的是Bi-LSTM 双向网络,单向LSTM 网络单元数为128,两个单元相互结合充分考虑了轨迹帧前后的时序信息,为正向隐含层输出,为反向隐含层输出,则网络的输出层单时刻元素使得模型可以同时学习车辆过去和将来的状态数据。
(3) Attention 层。 Attention 层的输入信息为LSTM 层中Bi-LSTM 双向网络的输出矩阵H=[h1,h2,…,hl]。 其中hi为每个时刻 Bi-LSTM 网络隐含节点的输出,i∈{1,2,…,l}。hi占车辆行为的注意力比重使用得分函数Score表示,分值越大,hi对车辆行为表征的贡献权重就越大。

式中:w、W、U为权重矩阵;b为偏置量;tanh 为非线性激活函数;可视为车辆状态信息高一级的行为表示向量,在训练过程中首先对h进行随机初始化,并作为一个参数逐步更新。
接着对每个时步的得分Score进行归一化计算,获得各个输入分配的注意力概率分布矩阵A=[α1,α2,…,αl],其中:

Attention 层在第t时刻的输出为

(4)输出层。 为获取各车辆行为的概率,使算法输出在0~1 之间,最终输出层为Softmax函数,车辆行为识别概率向量公式为

式中:Wv为连接权重;bv为偏置量。
取概率最大值为车辆行为识别结果:

3 试验结果与分析
3.1 数据集
本文中所使用的车辆轨迹数据一部分源于德国亚琛工业大学汽车工程研究所的开源数据集HighD[18]。 该机构采用无人机图像,以鸟瞰视角从德国高速公路上约420 m 距离的路程提取车辆的特征信息,图6 所示为所采集路段的鸟瞰视角。 公开的数据集包括6 个地点、16.5 h、11 万辆车辆的可用数据,总行驶距离为45 000 km,还包括了5 600条完整的变道记录,可满足交通场景的验证要求。 与大多数研究采用驾驶模拟器采集的数据相比,用于模型验证的真实数据使模型更健壮和实用。 与较为经典的 NIGSIM 轨迹数据集相比,HighD 数据集能有效解决假性重叠碰撞的问题,并提供了更为完整的车辆状态信息,尤其是车辆的换道次数、前车碰撞预警时间以及其周围车辆的ID等信息,这为本文中研究的车辆交互识别提供了丰富的研究素材,在数据的预处理方面也减免了大量的工作。
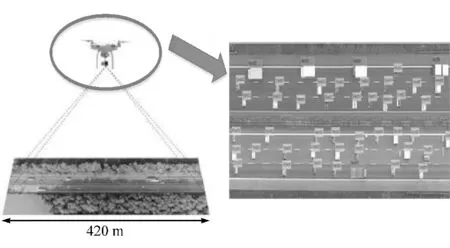
图6 HighD 数据采集路段的鸟瞰视角
尽管HighD 数据集采集路段与我国公路结构相似,多为双向双车道或三车道,但为了避免模型对HighD 数据集发生过拟合以及增强训练模型的泛化性能,用于训练和验证的车辆轨迹原始数据集另一部分来源于由真实路况下无人驾驶试验平台采集的车辆轨迹数据,采集路段主要位于江苏省镇江市京江路附近。 如图7 所示,所使用的无人驾驶试验平台以奇瑞艾瑞泽5E 电动汽车为主体,配备有GPS组合惯导 JY901B、速腾 RS-LiDAR-32/16*2 多线激光雷达、高性能工控机、Delphi-ESR 前后置毫米波雷达、Minieye 高清摄像机等车载设备。
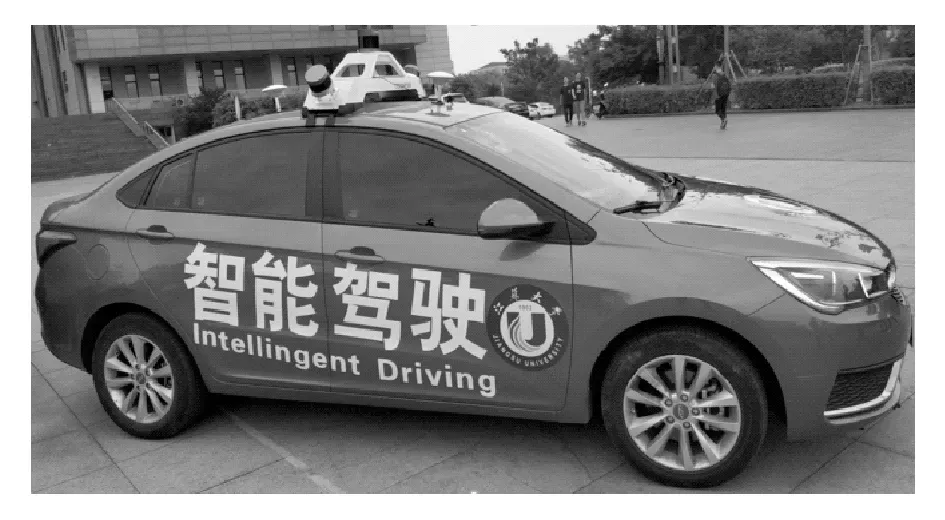
图7 基于奇瑞艾瑞泽5E 的无人驾驶试验平台
无人驾驶试验平台充分结合GPS 和惯性导航技术,并通过RTK 技术进行差分解算,能够减少建筑物、树木的遮挡影响,提供主车准确的位置、速度信息以及姿态解算结果。 平台主要通过速腾激光雷达获得周边车辆的位置、速度信息,该雷达基于ROS 系统实时录取车辆自身及感知数据。 创建trajectory_ node 节点,该节点实时订阅速腾雷达感知模块Perception SDK 发出的含有周边车辆位置中心和速度、航向角的话题/box_info 和/track_info,完成录制后将数据包中的数据由主车的局部坐标系转换为道路的全局坐标系。 本文中使用的是一个类似于笛卡尔坐标系的道路联合坐标系,纵向y轴指向高速公路的运动方向,横向x轴是垂直于它的方向,使得算法也能适用在弯曲道路上。 针对目标车辆的道路信息,则通过车辆横向位置与车道个数、车道线的位置去判断。
3.2 数据预处理
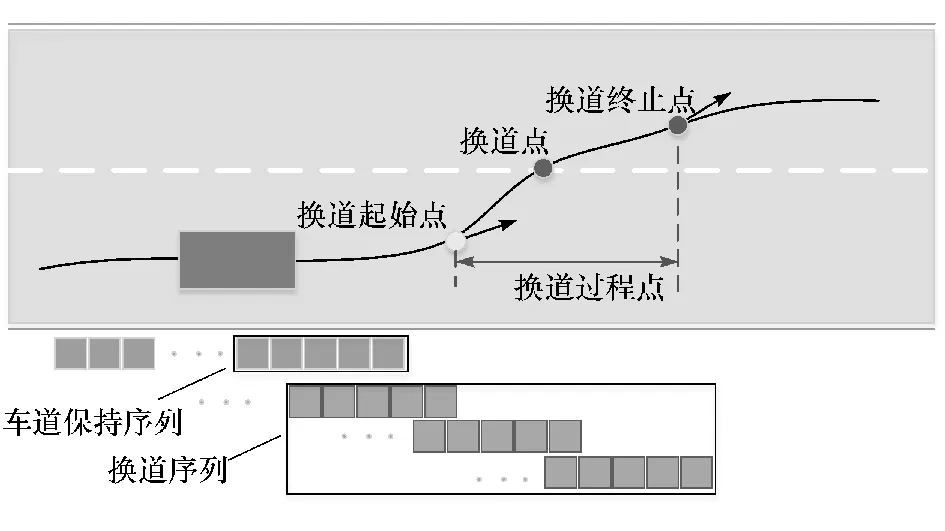
车辆轨迹数据是通过无人机高清摄像头或车载传感器采集后直接获取或间接处理得到的,系统误差及测量误差的存在使交通参量序列值噪声较大,尤其是速度信号抖动明显,因此预先采用了Savizkg-Golag 滤波算法对车辆的坐标、速度进行降噪预处理。 针对本文中主要研究无人驾驶周边目标车辆的横向行为,需要在数据集中提取不同车辆行为的轨迹序列并做相应的标注。 如图8 所示,该目标车辆将要执行左换道行为,车辆轨迹和车道线的交点表示为换道点。 计算车辆每个时刻相对车道线的航向角:

计算判定行为的航向角ηo时,使用的是间隔一个时刻的目标车辆位置,来增强不同行为类别ηo的区分度,以防止目标车辆在做车道保持行为时被误标签为换道行为。 目标车辆每次刚开始执行换道行为的时刻表示为换道起始点,刚执行完换道行为的时刻表示为换道终止点。 为减少噪声误差造成的误判,从换道点向前遍历,若连续3 个点为换道起始航向角阈值),则第1 个点认定为换道起始点;同理从换道点向后遍历,若连续3 个点ηe(ηe为换道终止航向角阈值),则第1 个点认定为换道终止点;换道起始与终止点(包括这两个点)定义为换道过程点。 根据试验效果,选取滑动时窗即序列长度T为20。 若轨迹序列的最后一个节点为换道过程点时,根据轨迹序列起始点车辆的横向位置分别判断为左换道序列和右换道序列;若轨迹序列的最后一个节点不为换道过程点,则定义为车道保持序列。
由于直线行驶工况远多于换道工况,所以提取车辆的车道保持序列数目显然是远远大于换道序列的,为防止训练过程中出现过拟合,每个行为序列集中选取的序列数量相同,最终从760 个目标车辆中提取出90 000 个样本序列(每个行为类别的序列样本分别为3 000 个),按8∶2 的比例将数据集随机划分为训练集、测试集。
3.3 试验细节
参考车辆轨迹预测相关的文献[22],为消减各原始数据数值跨度和单位不同带来的影响,采用min-max 归一化法将原始数据转化在(0, 1)之间,计算公式为

式中:x为原始数据;为归一化后的数据;xmax、xmin为样本数据的最大值和最小值。
为便于模型网络的训练,还需要对样本集的车辆行为标签采用“one-hot”热向量编码。 为体现本文中所提算法在无人驾驶周边车辆行为识别的性能效果,采用了两种现有算法和两种不完备模型对算法进行对比分析,具体如下:
(1)SVM,支持向量机算法,需要将具有时序特征转化为多维向量进行分类;
(2)HMM,隐马尔可夫算法,是车辆行为识别效果较稳定的传统模型代表之一;
(3)SLSTM,相比SLSTMAT 算法,模型输入量未引入注意力机制,而是直接将LSTM 网络最后一个时步隐含层向量ht输入到Softmax 层;
(4)LSTMAT,相比 SLSTMAT 算法,模型输入量未考虑目标车辆的周围车辆信息以及道路信息。
模型在识别模型的训练过程中,选取Adam (adaptive moment estimation)优化算法对模型参数进行优化。 Adam 是一种可以替代传统随机梯度下降过程的1 阶优化算法,该算法能够基于训练数据以实现误差反向传播,迭代更新神经网络的权重,使损失函数输出值逐步收敛达到最优。 为使目标函数收敛得更加平稳,同时也为提高算法效率,每次只取小批量样本进行训练。 损失函数为多类交叉熵损失函数,损失函数为

式中:为某一样本序列对应车辆行为类别的实际概率;wi为某一样本序列对应车辆行为类别的识别概率;S为每批次样本容量batch_size大小,试验中选取为100。
识别算法基于Python3 语言编写,基于Keras 框架加以实现。 试验平台硬件配置主要参数Intel Core i5-8600K 3.60 GHz,GTX 1080 和 DDR3 16 GB 内存,操作系统为Ubuntu Linux 16.04。
3.4 车辆行为识别试验
对于标签识别任务,定量分析常常以总体准确度(Accuracy)、精确率(Precision)、召回率(Recall)、F1-score 作为评价指标。 总体准确度为识别正确的样本个数占总样本个数的比例,精确率为识别正确的正样本个数占车辆行为识别判定为正样本的样本个数的比例,召回率为识别正确的正样本个数占真正的正样本个数的比例,F1-score 为精确率与召回率的调和平均值。 车辆行为测试集的结果如表1 所示。

表1 测试集定量分析性能结果
将所提出的SLSTMAT 模型与其他算法的结果进行比较,表1 显示了所提算法相较于其他算法在准确率方面有着显著的优势,总体准确度达到了94.01%。 引入注意力机制和目标车辆的交互信息,能够有效提高各类别车辆行为识别的精确率、召回率以及F1-score,尤其是对车道保持行为识别的提升较为明显,相对于 SVM 算法,F1-score 精度提升了14.88%。 这是因为在真实路况中即使是车道保持行为,目标车辆也会不可避免在车道中心线两侧发生之字形左右晃动,这种晃动容易使车辆行为识别系统将车辆保持行为误判为换道行为。 此外,SLSTMAT 算法通过引入注意力机制,持续关注整个换道行为样本序列全时刻的特征变化,促使目标车辆换道初期换道特征不显著的样本序列能够被识别出来,减少了换道行为被误认定为车道行为的样本数量,从而对于左右换道两种行为识别提升的召回率显著大于车道保持行为。 综上,所提SLSTMAT 算法引入的注意力机制能抓住更加稳健的时间信息,可以有效降低行为结果的误判。
3.5 车辆行为预判试验
对周边目标车辆横向行为的识别,最重要的是能够正确地感知到目标车辆的换道趋势。 作为自动驾驶系统视觉模块的后端与决策系统的前端,周车行为识别算法应该尽早地识别出目标车辆的行为态势。这是因为局限于车载传感器与运动控制器,只有在一定范围内预判出周边目标车辆的行为态势才具有实际意义。 定义车辆从当前位置到行驶至换道点所需时间为预判时间,从测试集的单次换道车辆中挑选不同预判时间下的序列作为输入。 图9 所示为预判时间范围在区间-3 s-0 内各类算法的识别效果。
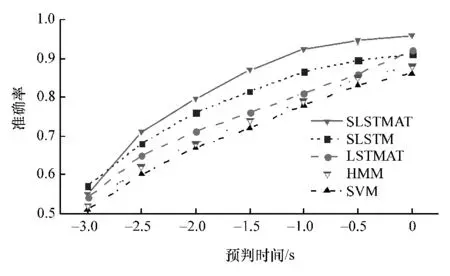
图9 不同预判时间的识别效果
由图9 可知:LSTM 系列网络较HMM 与SVM 方法在识别预判性能上有着显著的优势;SLSTMAT 算法相比起其他模型,能够在目标车辆换道前2.5 s 范围内提供较好的识别精度,在目标车辆在换道前2 s, 就能较为准确地识别出换道行为,准确度可达到80%;在车辆行驶至换道点前1 s 内识别精度在90%以上。 究其原因,算法能够“设身处地”站在被识别车辆的角度“观察”路况,在抓住交通环境的重要信息,并对目标车辆的未来行为做出合理的预判。结构化道路下车辆的平均换道时间在5 s 左右,假设换道点前和换道点后各占一半,基于SLSTMAT 的周车行为识别算法能在目标车辆开始执行换道动作之前就能做出合理推断。
4 结论
本文中提出了一种基于SLSTMAT 模型的周边车辆行为识别方法,能考虑LSTM 单元每个时步的注意力贡献权重来提高算法的特征表达能力,并通过CNN 网络融合目标车辆历史信息以及与周围车辆之间的信息进而对车辆行为进行交互建模。 该模型显示在实车采集和开源车辆轨迹数据集上能实现较高的识别准确度,算法可行性和实用性强。 此外,算法的定性分析显示了引入注意力机制、并对邻域车辆、道路信息进行交互建模以识别给定车辆的未来运动,能够显著提高换道前2.5 s 范围内的识别准确度,在车辆行驶至换道点前1 s 内识别精度达到90%以上,能提高后续决策系统的实时性,对于智能汽车技术的产业化应用具有重要的推动作用。 今后的研究工作将主要针对两个方面:第一是尝试分析目标车辆在典型交通场景下的高级语义行为,第二是考虑如何在保证识别精度的同时兼顾识别算法的计算成本。