基于重复-迭代学习复合控制的永磁同步电机转速低频波动抑制策略
2020-12-04轩富强卜飞飞杨志达潘子昊
轩富强,卜飞飞,杨志达,潘子昊
(南京航空航天大学 自动化学院,南京 211106)
0 引 言
永磁同步电机(PMSM)因其结构简单、高功率密度、快响应、低噪声等优点,被广泛用于电动汽车、家电、航空等领域[1-4]。但由于受齿槽转矩、逆变器死区时间、转轴摩擦、负载波动等因素的影响,电机运行时往往存在重复性的转矩脉动,进而造成周期性的转速波动[5]。一般来说,不同的电机运行速度、负载扰动频率、电机内部结构会造成不同频率的转速波动。特别是对于数控车床、机器人、光学工程等高性能、高精度应用领域而言,迫切需要更高精度的控制算法将不同频率的转速波动的波动控制得更小。
传统的比例积分(PI)控制因其结构简单,控制性能良好而广泛用于永磁电机的转速调节,但其抑制扰动能力有限[6]。为了抑制周期性转速波动,有学者将重复控制算法引入永磁电机的电流和转速控制中。所谓重复控制是依据内模原理,通过延迟一个周期环节,叠加相邻两周期误差值来控制被控对象[7-9]。它具有稳态精度高、适用于周期性控制等优点[10],近年来得到深入研究。文献[11]将重复控制引入电流环,实现了干扰下的周期信号精确跟踪,抑制了反电动势失真状况下的转矩脉动。文献[12]将重复控制引入自抗扰控制器,通过周期性补偿误差信号提高了收敛速度,降低了自抗扰控制的参数依赖性。文献[13]将有限冲击响应滤波器引入重复控制器,用于永磁电机电压源逆变器的死区补偿,着重抑制了六次及其倍数次谐波。文献[14]针对重复控制存在的分数阶问题,提出将角度重复控制与无差拍电流控制结合,并通过记忆纹波信号来调整重复控制频率,从而有效改善转矩脉动抑制效果。
纵观近年来关于重复控制的文献,发现重复控制多用来解决脉动频率在几百赫兹的转速中频率波动,鲜有解决脉动频率在几十赫兹甚至几赫兹的低频率波动。对于数字重复控制器而言,由于重复控制频率为开关频率与周期脉动频率的比值,而开关频率往往是固定的,当转速周期性波动动频率较低时,重复控制频率将会很大,再加上重复控制又是叠加相邻两周期误差值,所以每次叠加操作都会遍历一次重复控制频率,从而造成较大的延时和计算量。如文献[15]抑制步进电机转速低频率波动时,通过使用大量的移位寄存器来解决重复控制带来的延时问题,这无疑更增加了算法实现的复杂度和资源消耗,尤其对于碳化硅、氮化镓等更高频率的新型开关器件,这种情况将会更严重。而对于数控车床、机器人、光学工程、变频压缩机等领域,受转轴摩擦、低频率的负载波动、逆变器死区时间等众多因素影响,往往存在中低频率转速波动[16,17],因此若能对现有重复控制进行改进,使其兼顾中频和低频转速脉动抑制,并突破控制资源限制,则具有重要研究意义和应用价值。
与重复控制类似,迭代学习控制对周期性扰动也具有较好的抑制能力,特别是它对可重复控制对象能完全跟踪,对系统参数有较少依赖性,由此受到广泛关注[18-20]。文献[21]将迭代学习控制应用到电流控制,用于故障条件下恢复多相永磁电机驱动器性能,并提出了基于反电动势模型和基于迭代学习的容错控制技术。文献[22]将Smith预估和性能加权函数引入迭代学习控制,解决了时间滞后对迭代不稳定的影响,提高了永磁直线电机系统的控制精度和鲁棒性。
但是,若迭代学习控制抑制脉动的频率越高,相应地对收敛速度的要求也越高,这无疑会增加控制算法的复杂性,而重复控制则不会,它在抑制中频脉动方面具有较大优势。由于迭代学习控制抑制周期扰动时只需叠加上一时刻的输出信号,基本不造成延时影响,将其用于低频波动的抑制,可与重复控制实现优势互补,据此本文将迭代学习控制引入重复控制提出一种重复-迭代学习复合控制策略(RL-ILC),充分利用迭代学习控制的优势来有效改善重复控制对低频转速脉动抑制能力,从而既能抑制中频率转速波动,又能抑制转速低频率波动,且不需过大的重复控制频率,有效避免了控制算法的较大延时和复杂性。本文首先分析了重复控制产生较大延时和计算量的原因,然后,在此基础上提出了RC-ILC复合控制器,接着又对其进行了参数设计和稳定性分析,最后,开展了仿真和实验研究以验证所提控制策略的正确性和有效性。
1 PMSM转速波动分析
1.1 PMSM数学模型
永磁同步电机模型通过静止三相坐标到dq旋转坐标的变换,可将电机模型表示为
(1)
式中,ud、uq为定子电压d、q轴分量;id、iq为定子电压d、q轴分量;pn、ψf为极对数和转子磁链;Ld、Lq为直轴、交轴电感;ωr、Rs为机械角速度和定子电阻;J、Rf为 转动惯量和阻力系数;Tem、TL为电磁转矩和负载转矩。
1.2 PI控制下转速波动分析
谐波转矩、齿槽转矩、电流采样误差、逆变器死区效应、负载的周期性扰动等都可能造成永磁电机不同程度的转速波动[23-25]。这些众多因素的揉和,使电机也往往存在周期性的转速波动。一般来说,产生转矩脉动的因素不同、电机运行速度的不同、负载扰动频率的不同、电机内部结构的不同等会造成转速波动分布在不同的频率段——几百赫兹、几十赫兹甚至几赫兹。文中定义脉动频率为几百赫兹的转速波动为中频率波动,脉动频率为几十赫兹和几赫兹的为低频率脉动。PI调节对于中频率段转速波动不具有高增益[13],又由于电机机械惯量对上述低频率转速波动抑制作用较弱[17],进而对高精度操作领域如精密加工、机器人,光学仪器等造成严重影响,尤其电机低速运行时,几十赫兹和几赫兹频率段的转速波动更是不能忽略的。
2 RC-ILC复合控制器提出
如前文所述,重复控制和迭代学习控制都可以实现对转速周期性扰动进行抑制,但所适用的频率段有所不同[11,26],为此,本文考虑将二者有机结合,构成复合控制器来弥补单控制器的不足。
2.1 重复控制
重复控制是一种基于内模原理的控制策略,理论上可以实现对特定周期信号的无静差跟踪。重复控制器作为补偿器串联到控制对象传递其连续时域模型如图1所示,其中为扰动周期。
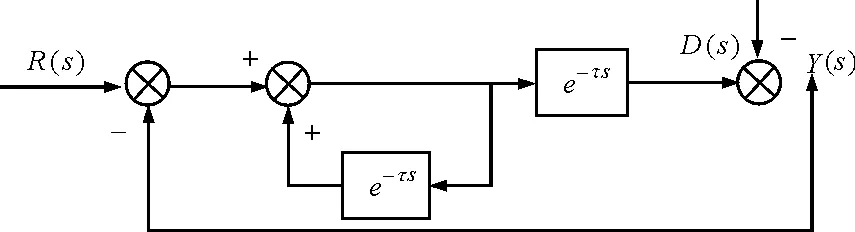
图1 基本重复控制结构图
由图1分析,给定信号与反馈信号的偏差输入作为重复控制输入,则重复控制的输出为当前控制偏差与上一周期同时刻偏差的叠加,并送入被控对象进行控制。重复控制经过一个基波周期才有控制作用,为了增强重复控制器未发生作用时的稳态特性,采用加入PI的改进重复控制器,并离散化可得到重复控制数字控制器如图2所示。
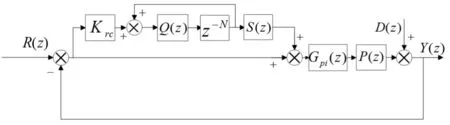
图2 改进数字重复控制器
其中,重复控制器与跟踪误差值叠加是常用形式,可增加系统的动态响应能力[27]。Q(z)常选为低通滤波器或小于1的常数以改善系统稳定性。Krc为重复控制增益,用于幅值补偿,与收敛速度和波动抑制能力成正相关,与稳定性成负相关。重复控制器中补偿环节S(z)可以对系统中频率响应较差的频段进行补偿,以提高系统动态性能或稳态性能[28]。N=fs/fx(fs为采样频率,fx为要滤除转速波动的频率)为重复控制器的基波频率。
2.2 重复抑制低频率脉动不足分析
由N=fs/fx可知,若要削弱几百赫兹中频转速波动,如100Hz,当开关频率为10kHz时,数字重复控制器的N则为100,这是通常是可行且易实现的。但是若要削弱更低频率的低频转速波动,如5Hz,当开关频率为10kHz时,数字重复控制器的N则为2000,特别是,对于碳化硅和氮化镓等新开关器件,其开关频率达到上百千赫兹,N会更大。由于重复控制会将相邻两周期误差值叠加,且每次叠加操作都会遍历一次重复控制频率,这样一来,如果重复控制频率很大,显然会造成较大的延时、较多的资源消耗以及增加算法复杂度,甚至电机无法正常运行。而若是一味降低N,周期脉动的抑制能力则会大打折扣。如何克服这一问题,对于拓宽重复控制抑制速度波动的频率范围至关重要,这也是本文研究的重点。
2.3 RC-ILC复合控制器
与重复控制一样,迭代学习控制(ILC)也能消除周期性扰动。它能够在有限时间内跟踪期望轨迹,具有基于记忆的无模型控制机制,有学习收敛快、适应能力强、算法简洁、易于工程化等优点[17,29]。
对于具有可重复性的被控对象,迭代学习是利用控制系统先前的控制经验,根据测量系统的实际输出信号和期望信号,来寻找一个理想的输入特性曲线,使被控对象产生期望运动,其基本原理如图3所示。
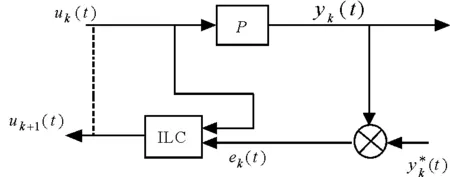
图3 开环迭代学习基本原理图
由图3可得到公式:
(2)
由式(2)可得到误差的迭代公式为
ek+1(t)=(1-Gc(p)L(p))ek(t)
(3)
在式(3)中,若|1-Gc(p)L(p)|<1,则误差逐渐收敛为0。
因迭代学习控制抑制周期扰动时只需叠加上一时刻的输出信号,基本不造成延时影响。而且常规ILC的收敛速度足以满足低频率脉动的抑制要求,若将迭代学习控制引入重复控制,由迭代学习作用转速低频波动段,重复控制保持其对中频波动段的作用,则不需过大的重复控制频率即可有效抑制转速低频波动。基于这一思想,本文考虑引入ILC,与重复控制构成RC-ILC复合控制来消除重复控制难以抑制的转速低频波动,其控制结构如图4所示。
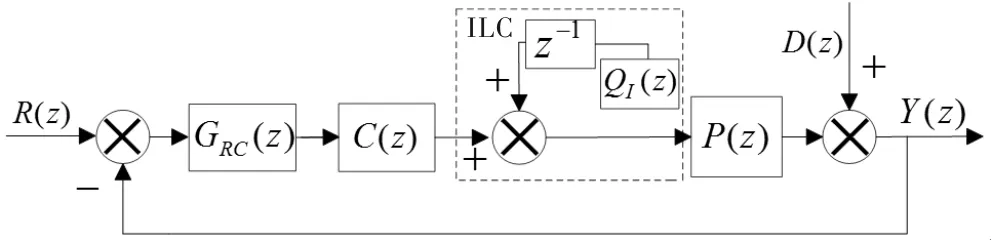
图4 RC-ILC复合控制器结构图
图4中重复控制器和迭代学习控制器的复合采用串联的形式。C(z)为迭代学习的控制律,QI(z)为补偿器。因为ILC的迭代性重复学习在一定程度上可以加快重复控制的收敛速度。但因为两个控制器都是重复叠加误差信号控制被控对象,要考虑两控制器复合时带来的相互不利影响,并达到理想抑制效果,这是RC-ILC复合控制算法实现的一个难点。
分析图4可知,当带有重复性扰动的误差信号进入控制算法,先由重复控制消除中频率的扰动,并通过添加的QI(z)补偿器消除了复合的不利影响,则迭代学习控制不会叠加中频率的扰动。因重复控制只对特定频率的重复性扰动有增益放大的效果,所以低频率扰动会通过迭代学习控制而得到抑制。
3 RC-ILC复合控制器求解
将重复-迭代学习复合控制器放入永磁同步电机的矢量控制中,用以转速调节和波动抑制,其控制总体图如图5所示。对于图5,如何设计RC-ILC复合控制器是其中的关键。

图5 PMSM RC-ILC控制器总体图
3.1 重复控制部分求解
(1)内模设计
由2.2节分析可知内模中N的取值。因为中频段扰动抑制Q(z)选为低通滤波器也只起到类似于常数的作用,为了减小设计量并避免低通滤波器对信号幅值相位的影响,Q(z)选择为常数。因Q(z)大小与稳态精度成正比,与稳定性成反比,本文选取工程上常用的0.95[30]。
(2)补偿器设计
补偿器S(z)的主要作用是补偿中频段的相位偏移和高频段扰动,提高系统的整体特性,弥补重复控制存在的问题。
因低频扰动由ILC进行抑制,而重复控制器只对特定的周期及其倍数周期具有很高的增益,所以对不会对并联的RC控制器产生影响。中频段由重复控制器带来的较高增益并通过PI控制器进行抑制。对于系统可能存在的高频扰动,通过补偿中加入二阶低通滤波器进行幅值衰减,可设计其数字控制形式为
H(z)=
(4)
系统的高频扰动集中在开关频率处,所以可以把二阶低通滤波器的ωl设置为开关频率的十分之一。
阻尼系数对重复控制器的性能影响不大,所以可选取为工程上常用的数值0.707[30]。
为了补偿转速环与二阶低通滤波器产生的相位滞后,采用超前环节z-4进行相位补偿。所以补偿器的传递函数为:
S(z)=z-4H(z)
(5)
3.2 迭代学习部分求解
(1)迭代学习控制律选择
为了减少系统跟踪的初始偏移,加快迭代收敛速度,提高系统的跟踪性能和鲁棒性,GILC(z)为引入PI型闭环迭代学习控制器。为了抑制非周期扰动和重复控制对迭代学习的影响,提高迭代学习控制器的鲁棒性,在前一输出信号后加补偿器再与当前PI控制律的输出叠加,其公式为
(6)
其中,QI(p)为补偿器,p为微分算子。
(2)PI控制律参数整定
因重复控制器只是放大了特定频率的扰动,迭代学习控制器是在PI控制律上叠加上一次输出,所以可根据单PI控制器设计PI参数。单PI控制器的参数Kp、Ki可由下式进行整定:
(7)
式中,β为转速环期望的频带带宽。
(3)QI(p)补偿器设计
因复合控制器中重复控制和迭代学习依靠频率进行区分控制,又需要滤除非周期扰动对迭代学习的影响,所以补偿器考虑选用低通滤波器。迭代学习控制器的低通滤波器截止频率低于重复控制器所滤中频扰动可避免两控制器的相互影响,但其设置过低会影响控制器性能和鲁棒性。考虑过渡带的低频衰减,所以其截止频率可设置为略高于所滤中频扰动的频率。
由上述分析可得到RC-ILC复合控制器数字控制结构图,如图6所示。
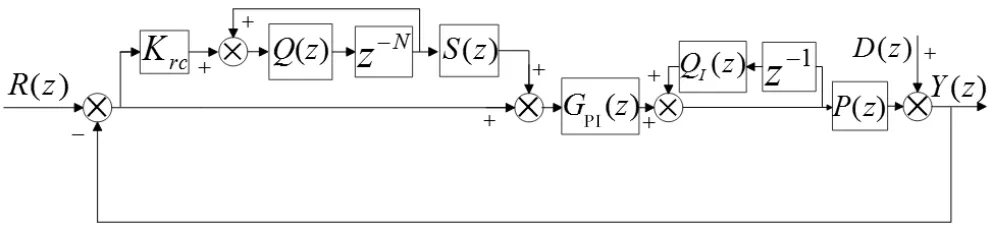
图6 RC-ILC复合控制器控制图
3.3 稳定性分析
重复控制的增益放大特性与迭代学习的收敛特性同时作用于周期性脉动,可能会造成脉动的放大,使调速性能恶化,所以有必要对RC-ILC复合控制算法进行稳定性分析。
为了分析简便,用连续传递函数分析其稳定性。
连续状态下不考虑补偿器下的闭环传递函数为
(8)
将式(6)通过添加时滞环节的方式转化为传递函数为
(9)
由式(8)和式(9)并利用一阶Pade近似简化时滞环节,可得到复合控制器的传递函数为
(10)
通过式(10)和电机的等效传递函数模型可得到开关传递函数的奈奎斯特(Nyquist)图,通过Nyquist图判断右半平面极点的个数可判断其稳定性。通过式(10)也可看出闭环传递函数的极点与ωI相关。
通过调节合适的ωI,RC-ILC复合控制器可达到较好的鲁棒性,同时在抑制低频波动时可表现出较快的收敛速度。
4 仿真验证
为了验证RC-ILC复合控制器的效果,在PMSM调速系统中进行Matlab/simulink仿真,相关参数如表1所示。
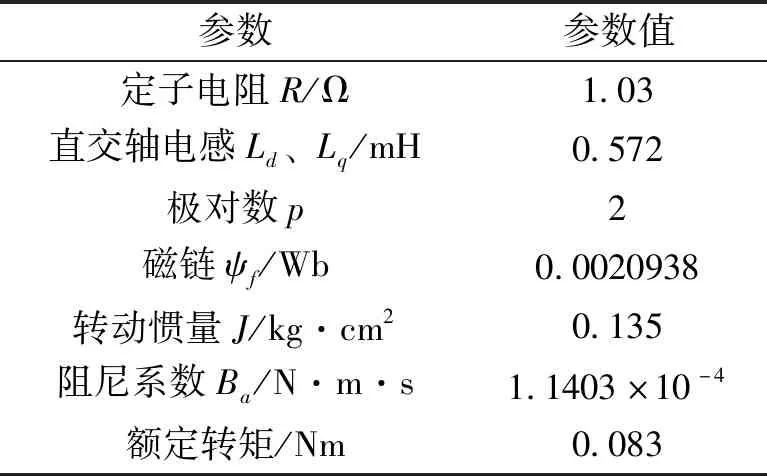
表1 PMSM电机参数
为了验证RC-ILC复合控制器在抑制低频波动的同时能保持中频波动抑制性能,仿真中设置5Hz和133Hz的复合负载转矩脉动。并将开关频率设置为10kHz,转速设置为500r/min。
根据3.1分析,开关频率为10kHz下,二阶低通滤波器的截止频率ωI可设置为2kHz。由3.2(3)分析,因中频扰动频率约为133Hz,考虑避免两控制器的相互影响和鲁棒性能,所以其截止频率可设置为160Hz。通过公式计算Kp为0.025,选择带宽增益为20,可得到Ki为0.5。根据以上参数,做出3.3节中的Nyquist图,如图7所示。由于图像不包含(-1,0)点,系统则稳定,即在该参数下重复控制与迭代学习控制的复合不会产生脉动放大的影响。
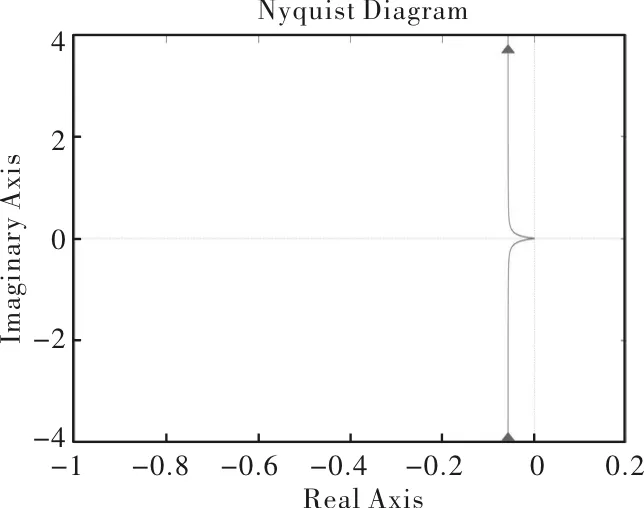
图7 奈奎斯特图
由2.2节分析,若RC控制器要抑制其为5Hz的低频波动,需要频率N=2000的重复控制器;抑制中频波动,则N=75。在仿真条件下比较N=2000和N=75下单重复控制器的抑制效果,如图8所示。
从图8看出,单重复控制器通过较大的重复控制频率 在仿真中可以实现对转速低频波动的较好抑制。但 过大时转速达到稳定的较大延时影响了实验中电机的正常运行,且由此增加了转速超调,也减弱了对中频波动的抑制效果。
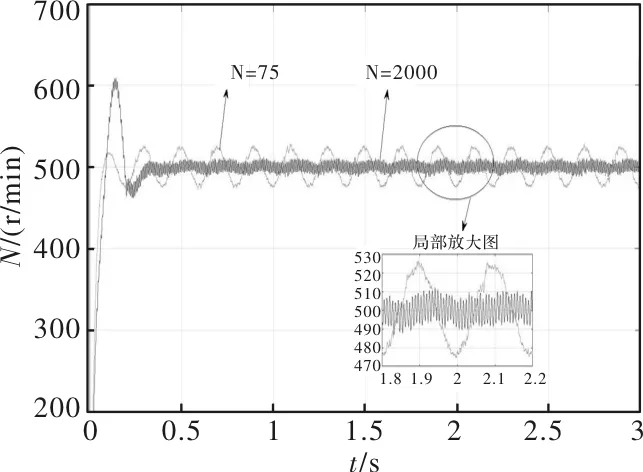
图8 单重复控制器不同重复频率抑制效果对比
在N=75情况下进行复合控制器、单控制器、常规PI对比的仿真对比,结果如图9所示。可看出RC-ILC复合控制器在不降低重复控制频率而保持中频扰动抑制性能的同时,对低频扰动的抑制效果接近N=2000。
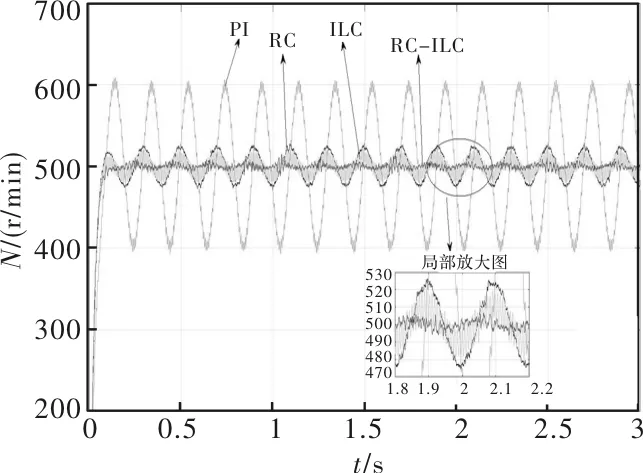
图9 复合控制器、单控制器、常规PI对比仿真图
5 实验验证
本文采用TMS320F28335 DSP作为控制单元,在永磁同步电机调速系统实验平台上开展实验。开关频率为10kHz,位置速度检测采用光电编码器。PMSM的调速方式采用id=0控制。转速设置为500r/min,额定转速为5430r/min,其它相关参数见表1。
电机转速的快速傅里叶变换(FFT)图如图10所示,可知其明显存在10Hz以下的低频波动。由第4节分析,对于单重复控制器来说,若抑制这些低频波动,会因需要较大重复控制频率而影响电机的正常运行,而相应减小重复控制频率抑制性能将大打折扣。
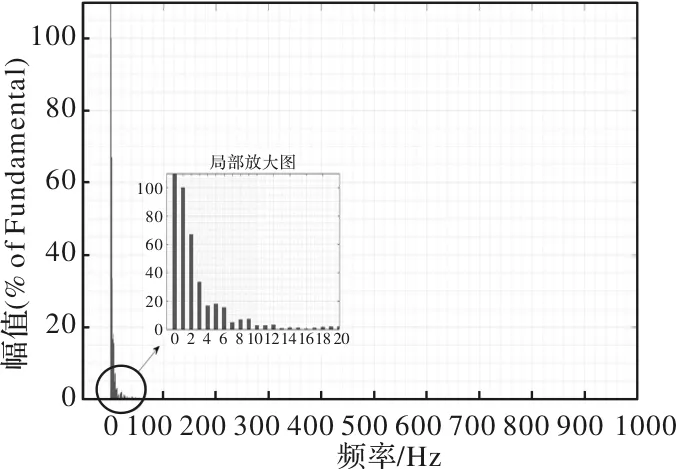
图10 转速的FFT图
因上述第4节仿真已验证RC-ILC复合控制器能保持中频波动的抑制性能,所以实验重点考察其转速低频波动抑制效果,相应地设置重复控制频率为N=75对比单重复控制器和RC-ILC复合控制器的低频波动抑制效果,如图11和图12所示。可看出当中间时刻转速环引入迭代学习控制构成的复合控制器后,实验电机运行时带有的10Hz以下的转速低频波动都有明显减弱,抑制效果好于单重复控制器。且相应的U相电流波形也有了明显改善,可知RC-ILC重复控制器也通过作用于电流内环稳定转速,进而反映出其对转速低频波动的抑制效果。

图11 RC控制器与RC-ILC复合控制器的转速波动抑制效果对比图
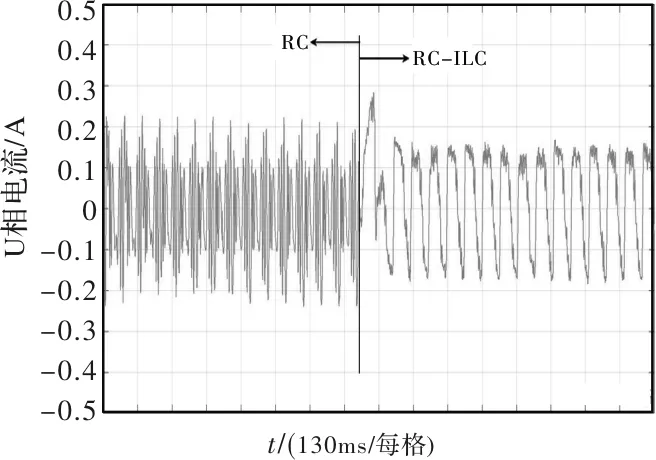
图12 RC控制器与RC-ILC复合控制器下U相电流对比图
6 结 论
针对重复控制抑制转速低频波动时存在的较大延时和时间复杂度问题,本文将重复控制与迭代学习控制抑制周期脉动只需延时一个采样周期的优势结合,提出一种基于重复-迭代学习复合控制的转速低频波动抑制策略。所提出的重复-迭代学习复合控制器在保持现有重复控制器较好的转速中频波动抑制能力基础上,无需过多提高重复控制频率,通过融入迭代学习控制即可改善其对低频波动的抑制效果,并加入参数设计和稳定性分析以避免出现脉动放大。仿真和实验结果验证了RC-ILC复合控制能有效抑制转速低频脉动,且延时小,时间复杂度低。而且该复合控制器也改善了单ILC控制器随脉动频率增加需提高算法复杂度的问题。
