基于电流矢量分解的开关磁阻电机转矩脉动抑制
2020-12-04李宏慧夏新祥蒯松岩
李宏慧,夏新祥,蒯松岩
(1.平顶山工业职业技术学院,河南 平顶山 467000;2.中国矿业大学 电气与动力工程学院,江苏,徐州 221116)
0 引 言
开关磁阻电机(Switched Reluctance Motor,SRM)结构简单而坚固、成本低、可靠性高、转速范围宽且在整个调速范围内都有很高的效率[1]。但作为一种时变、非线性、强耦合的系统,使用传统控制策略难以获得优异性能,如电流斩波控制方法适用于低速运行,而角度位置控制适用于高速运行,且两种方法都会产生较大的转矩脉动,这也是开关磁阻电机较为突出的缺点。但通过各国学者多年的不懈努力,大量的研究表明通过优化控制策略能大大的减小转矩脉动[2]。文献[3-4]提出的转矩分配函数控制能有效的减小转矩脉动。为了抑制开关磁阻电机在换相阶段由于转矩特性、电压限制、转速升高等因素而引起的转矩脉动,文献[5]提出了基于在线修改TSF的直接转矩控制方法。文献[6]介绍了以铜耗最小化或驱动性能最大化为次要目标的TSF的优化准则,利用这些准则从一系列转矩分配函数中选择最优TSF。但转矩函数选择比较复杂,需要针对不同电机进行优化。文献[7]提出了基于转矩滞环和磁链滞环的SRM直接转矩控制,其非零基本矢量有6种,扇区是由磁链角度来确定,该方法能有效抑制转矩脉动,但该方法采用类似传统交流电机圆形磁场方式进行控制,各相均会产生较明显的负转矩、电机效率降低。文献[8-10]针对传统的方波励磁控制时参数多、优化控制复杂的问题,提出了一种带有直流偏置的正弦电流励磁条件下的开关磁阻电机矢量控制方法,并建立了旋转坐标系上开关磁阻电机数学模型。文献[11]在上述矢量控制方法基础上进一步采用电压空间矢量(SVPWM)实现电流控制。上述矢量控制方法虽然实现了平均转矩闭环控制,但都没有考虑磁阻转矩分量对瞬时转矩的影响,导致转矩脉动较大。针对这一问题,文献[12-13]提出了向直流励磁电流中注入谐波的方法来减小变磁阻电机转矩脉动。文献[14]提出了一种单极性正弦电流励磁条件下的SRM矢量控制方法,并在此基础上提出向零序电流中注入3次谐波电流来降低转矩脉动。虽然上述谐波注入法都能减小转矩脉动,但都没有考虑磁路饱和时的情况。
本文针对传统的单极性正弦励磁控制会产生较大转矩脉动这一问题,提出了一种基于电流矢量分解的转矩脉动抑制策略。该转矩脉动抑制控制策略满足磁路饱和时的情况,通过优化矢量减小了产生的负转矩,提高了电机效率。
1 传统单极性正弦励磁控制
图1为12/8结构的开关磁阻电机。定、转子凸极重合处定义为0度,电机绕组输入电流为ia、ib、ic,电流和电感之间的提前开通角为β。忽略磁场饱和,只考虑自感和互感中的直流和基波分量,则开关磁阻电机电感方程为

图1 12/8结构的开关磁阻电机

(1)
式中,La、Lb、Lc分别为定子A、B、C三相的自感;L0为等效相绕组自感直流分量;L1为等效相绕组自感基本分量的幅值;θe为转子电角度。定义电流和电感之间的提前开通角为β,则绕组的输入电流ia、ib、ic表达式为
(2)
式中,is为电流的交流基波分量幅值,i0为直流偏置电流。
根据文献[8]可知,转矩方程为
(3)
通过坐标变换可将静止三相坐标系数学模型变换到旋转坐标系中,且电流变化方程为
(4)
根据式(3)和式(4)可得,瞬时电磁转矩的公式为
(5)
其中,id、iq为ia、ib、ic在d-q坐标系上的d轴和q轴分量;p为转子极对数。
由式(5)所示的SRM转矩方程可知,转矩包含两部分:前面一部分为电枢和磁场相互作用产生的转矩,后面一部分为磁阻转矩。由于磁阻转矩对平均转矩没有贡献,SRM在d-q坐标系上平均转矩和iq分量成正比。其中,id对平均转矩没有影响,因此采用id=0控制可以降低损耗,此时超前角β=90°且is=iq,计算得到平均转矩为20N时的转矩图形如图2所示。

图2 单极性正弦励磁时的理论转矩(is=i0=5A)
2 改进型单极性励磁方式
2.1 恒iq型单极性励磁优化控制
图3为传统单极性正弦励磁控制时的电流和电感示意图。由电感和转矩式(5)分析可知,在[0°,120°]区间内C相电流会产生负转矩,造成转矩脉动,同时降低了电机的效率。同理,[120°,240°]区间内的A相和[240°,360°]区间内的B相电流也会产生负转矩。为解决这一问题,本文提出了一种新型单极性励磁方式,即通过改变消除各区间产生负转矩部分的电流。

图3 单极性正弦励磁时电感和电流示意图
由于消除各区间产生负转矩部分的电流后每个时刻相当于只有两相电流同时作用于绕组,采用id=0的控制方法,则iq可以根据空间矢量分解的方法被分解为两相电流矢量的和。如图4所示为θc在区间[0,2π/3]时,iq可分解为ia、ib的矢量和。此时电流和电感之间的提前开通角为β=90°,则电流矢量的相位角θc=θe+π/2。并得到ia、ib和iq之间的关系式为

图4 iq矢量分解图
(6)
同理,当θc在区间[2π/3,4π/3]时,iq可分解为ib、ic的矢量和;当θc在区间[4π/3,2π]时,iq可分解为ic、ia的矢量和。根据iq矢量分解的原理,可以得到恒iq型单极性励磁方式的电流如图5所示。由式(4)可知,恒iq型单极性励磁方式下的偏置电流i0不为恒值,且偏置电流i0的变化情况如图6所示。因此将式(2)中的i0按照图6所示变化即可消除产生负转矩部分的电流。

图5 恒iq型单极性电流

图6 恒iq型单极性电流的i0
由于恒iq型单极性励磁方式只有两相电流同时工作,瞬时转矩Te可表示为两相瞬时转矩之和。以θc在区间[0,2π/3]时为例,此时Te=Ta+Tb,则根据式(3)和式(6)可以得到Te关于iq和θc的公式
(7)
图7为恒定iq型单极性励磁时的理论转矩图形,且平均转矩为20N。与单极性正弦励磁时的理论转矩对比可以看出,恒iq型单极性励磁时产生的负转矩大大减少,因此电机的效率提高了,且恒iq型单极性励磁时的转矩脉动有所减小。
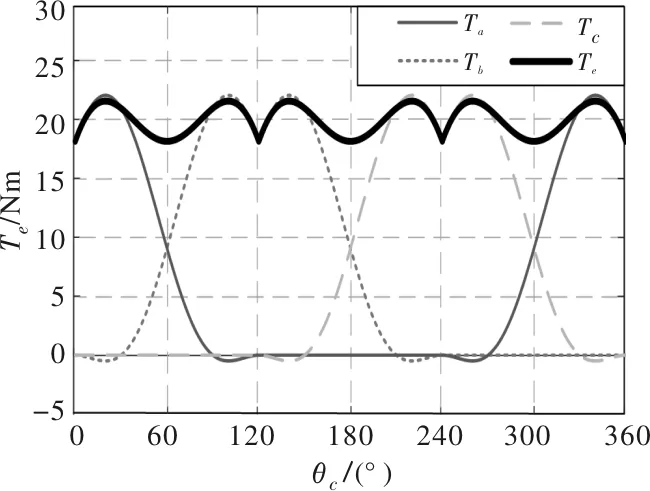
图7 恒iq型单极性励磁时的理论转矩
2.2 变iq型单极性励磁优化控制
由式(7)可知,SRM转矩脉动主要和iq有关,因此可以通过调节iq的大小来减小转矩脉动。令瞬时转矩Te为恒值时就可以得到iq与θc的关系。由于式(7)是在磁路不饱和情况下才满足,得到的转矩Te关于iq和θc的式(7)也只是在磁路不饱和情况下才满足。因此需要建立新的瞬时转矩模型来满足磁路饱和时的情况。
图8为实验测得的SRM样机转矩特性。根据式(6)和测得的转矩特性可以得到Te-iq-θc的二维表。根据二维表Te-iq-θc可以得到图9所示的时瞬时转矩Te和θc的关系图以及图10所示的瞬时转矩Te和iq的关系图。从图9可以看出,瞬时转矩Te是关于θc的周期函数,且120°为一个周期,所以瞬时转矩可用傅里叶级数表示为
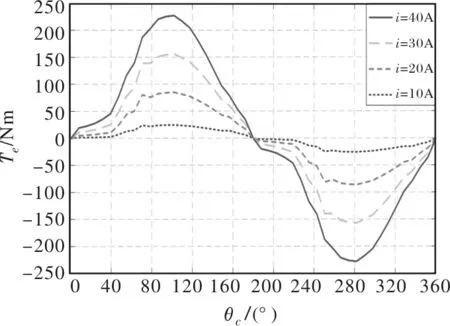
图8 样机转矩特性

图9 不同iq时,瞬时转矩Te和θc的关系图

图10 不同θc时,瞬时转矩Te和iq的关系图
(8)
选取式(8)中的前三项(n=0,1,2)来建立非线性的瞬时转矩模型,则瞬时转矩Te的表达式为
Te(iq,θc)=T0(iq)+T1(iq)sin3θc+T2(iq)cos3θc+
T3(iq)sin6θc+T4(iq)cos6θc
(9)
式中,T0(iq)、T1(iq)、T2(iq)、T3(iq)、T4(iq)可以根据五个位置的瞬时转矩曲线求得。
为了使建立的瞬时转矩模型精确度更高,因此需要合理的选择这5个位置。通过观察图9中转矩变化特点,选择以下了5个位置:θ1=22°、θ2=46°、θ3=70°、θ4=94°和θ5=118°,这几个位置的转矩分别用Tθ1(iq)、Tθ2(iq)、Tθ3(iq)、Tθ4(iq)和Tθ5(iq)表示。
根据式(9),当选取上述5个位置时,可建立如下所示的矩阵方程
(10)
根据上式可以得到,
(11)
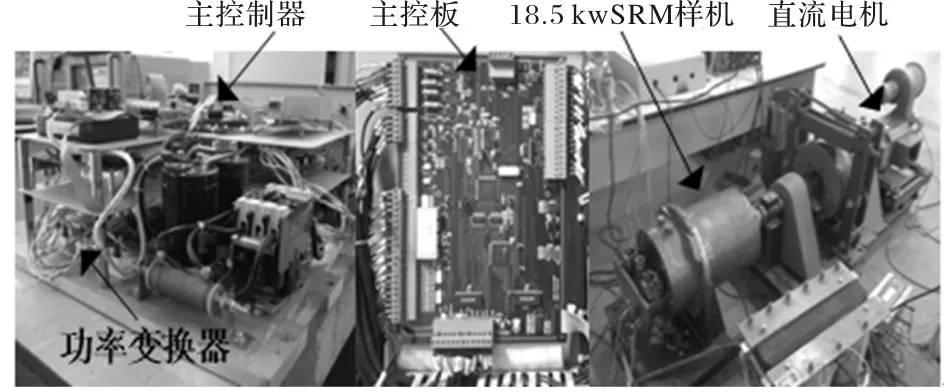
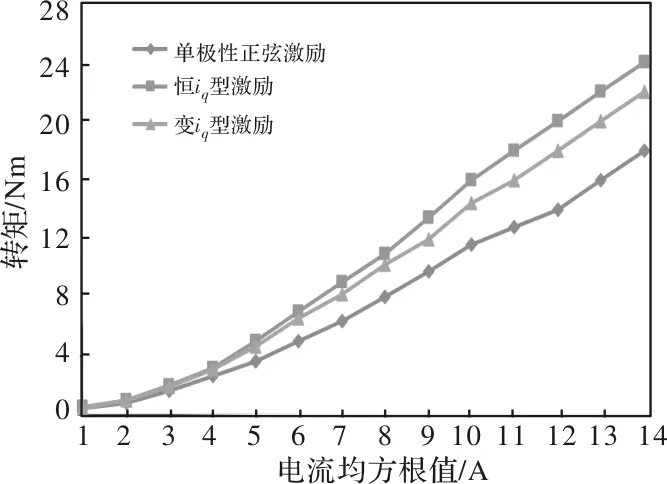
由图10可知,在任意一个位置θc,瞬时转矩Te和iq的关系在iq≤10和10 (12) 式中,Tθc为转子位置角为θc时的瞬时转矩。 根据上文分析可知,上文选取的五个位置的转矩Tθ1(iq)、Tθ2(iq)、Tθ3(iq)、Tθ4(iq)和Tθ5(iq)均可由式(12)所示的分段线性函数拟合得到。将拟合结果代入到式(11)中,即可得到T0(iq)、T1(iq)、T2(iq)、T3(iq)和T4(iq)的函数表达式,且其函数表达式也是分段线性函数。其通式的形式如下所示 (13) 式中,k1n、k2n、b1n、b2n为线性函数的系数。 表1为计算得到的各项系数的值,只需20个系数就可以表示出SRM转矩特性。 表1 瞬时转矩模型的系数 将计算得到的T0(iq)、T1(iq)、T2(iq)、T3(iq)和T4(iq)代入式(9),即可得到瞬时转矩Te(iq,θc)关于iq、θc的数学模型: (14) 根据上面建立的瞬时转矩模型,计算出一个周期内不同iq下的转矩特性,并于图9所示测得的SRM转矩特性进行对比,对比结果如图11所示。由图11可以看出,实际转矩特性曲线与转矩模型计算得到的曲线基本重合。 图11 一周期内转矩模型与实际转矩对比 (15) (16) 图12 iq与θc之间的关系 图13 变iq型单极性励磁时的电流 图14 变iq型单极性电流的i0 图15 基于电流矢量分解的低转矩脉动控制系统 本文构建了以DSP为控制系统核心实验平台,表2为实验样机的参数。以某公司的TMS320F2812 DSP为核心控制芯片,功率变换器采用三相不对称半桥电路,主开关器件IGBT采用K75T60。图16为开关磁阻电机控制系统实物图。 图16 开关磁阻电机控制系统实物图 表2 样机参数 表3中的转矩脉动按照如下公式计算: (17) 式中,Tmax为转矩最大值,Tmin为转矩最小值,Tavg为转矩平均值。 图17~图19为上述三种励磁方式下的电流和转矩的实验波形。从图17可以看出,传统单极性正弦励磁方式下的SRM转矩脉动较大,由式(17)可知,平均转矩为20N时转矩脉动为0.98,平均转矩为80N时转矩脉动为1.05。同理,由图18可知,恒iq型单极性励磁方式时的转矩脉动稍有下降,平均转矩为20N时转矩脉动为0.83,平均转矩为80N时转矩脉动为0.89。由图19可知,在两种给定转矩下,变iq型单极性励磁方式的转矩脉动都保持在0.26左右,表明该控制方式下的转矩脉动大大减小了。 图17 传统单极性正弦励磁模式下的电流和转矩波形 图18 恒iq型单极性励磁模式下的电流和转矩波形 图19 变iq型单极性励磁模式下的电流和转矩波形 图20为三种励磁方式下转矩电流比的比较。由图可知,恒iq型单极性励磁时的转矩电流比最大,主要是因为恒iq型单极性励磁方式去除了产生负转矩部分的电流。尽管变iq型单极性励磁方式也去除了产生负转矩部分的电流,但变iq相当于叠加了谐波电流,使得电流平均值变大。然而,单极正弦激励不可避免地会产生较大的负转矩。因此,图20中单相正弦激励的转矩电流比性能最差。 图20 三种励磁方式下转矩电流比的比较 图21为三种励磁方式下转矩脉动的比较。其中,变iq型单极性励磁方式转矩脉动最小,单极性正弦励磁和恒iq型单极性励磁方式在电流换相处转矩较小而产生转矩脉动。 图21 三种励磁方式下转矩脉动的比较 针对开关磁阻电机单极性正弦励磁时转矩脉动较大、效率低的问题,本文提出了恒iq型单极性电流励磁方法。但该方法也会产生较大的转矩脉动,因此本文提出了变iq型单极性电流励磁控制方法,并建立了一种考虑磁路饱和时的转矩模型。通过该转矩模型能够快速得到Te和iq的关系,且满足磁路饱和情况。该转矩模型只需要20个系数,大大减少了数据存储量,降低了内存占用空间。实验结果表明,变iq型单极性电流励磁控制方法能够很好的抑制开关磁阻电机的转矩脉动。






2.3 控制系统整体结构



3 实验结果与分析





4 结 论